S-ar putea să vă placă și
- Ch13Document28 paginiCh13Faiza BadarÎncă nu există evaluări
- CH 9 - Discrete Control Using PLC's and PC'sDocument22 paginiCH 9 - Discrete Control Using PLC's and PC'sTehseenakhtarÎncă nu există evaluări
- Groover Ch7 Numerical ControlDocument65 paginiGroover Ch7 Numerical Controlrony100% (1)
- RoboticsDocument37 paginiRobotics9944805552Încă nu există evaluări
- Robot Cell DesignDocument18 paginiRobot Cell DesignShione T Mundawarara57% (7)
- 67047-Ch14 BaruDocument48 pagini67047-Ch14 BaruDanielÎncă nu există evaluări
- Everything You Need to Know About Collaborative RobotsDocument25 paginiEverything You Need to Know About Collaborative Robotsశ్రీకాంత్ మడకÎncă nu există evaluări
- Review of Control Systems in RoboticsDocument10 paginiReview of Control Systems in Roboticsroyson316Încă nu există evaluări
- Mechanisms and Robotics de Es Zg561: Lecture - 2Document49 paginiMechanisms and Robotics de Es Zg561: Lecture - 2AnkithÎncă nu există evaluări
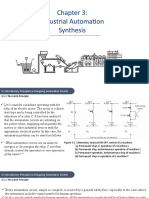
- Chapter3-Industrial Automation SynthesisDocument36 paginiChapter3-Industrial Automation SynthesisThuan HuynhÎncă nu există evaluări
- Robotics Lab Manuals Final PDFDocument38 paginiRobotics Lab Manuals Final PDFravihbti100% (1)
- Robotics Notes1Document19 paginiRobotics Notes1Prince PavanÎncă nu există evaluări
- Lecture 2 - (Robotic Control)Document39 paginiLecture 2 - (Robotic Control)ShamaÎncă nu există evaluări
- Field RoboticsDocument70 paginiField RoboticsSkanda SwaroopÎncă nu există evaluări
- RObotics and Automation Question Bank AnDocument19 paginiRObotics and Automation Question Bank AnSharmila83Încă nu există evaluări
- Automation Studio ProDocument24 paginiAutomation Studio PronelsonÎncă nu există evaluări
- Robotics Programming and ApplicationsDocument38 paginiRobotics Programming and ApplicationsShanti Lal MeenaÎncă nu există evaluări
- Major Components of Industrial RobotsDocument8 paginiMajor Components of Industrial Robotsharikiran3285Încă nu există evaluări
- Automation in ManufacturingDocument41 paginiAutomation in ManufacturingOmar AhmedÎncă nu există evaluări
- CIM Guide: Computer Integrated Manufacturing Processes ExplainedDocument32 paginiCIM Guide: Computer Integrated Manufacturing Processes ExplainedVarshaÎncă nu există evaluări
- Robotic Pick and Place for Airport CargoDocument11 paginiRobotic Pick and Place for Airport Cargopappa20Încă nu există evaluări
- Group TechnologyDocument39 paginiGroup Technologyanon_106272691Încă nu există evaluări
- Industrial RoboticsDocument30 paginiIndustrial RoboticssoniyagoyalÎncă nu există evaluări
- Robotics and Computer Vision in Swarm Intelligence and Traffic SafetyDocument10 paginiRobotics and Computer Vision in Swarm Intelligence and Traffic SafetyAnupama AnuÎncă nu există evaluări
- Robot Cell DesignDocument25 paginiRobot Cell Designnandkishor joshi100% (1)
- Robot Motion Planning: Approaches and Research IssuesDocument26 paginiRobot Motion Planning: Approaches and Research IssuesRahul KalaÎncă nu există evaluări
- SENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTDocument28 paginiSENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTMahaManthraÎncă nu există evaluări
- Lec 2 Robot ManipulatorsDocument14 paginiLec 2 Robot ManipulatorsAjanthan AlagaratnamÎncă nu există evaluări
- Design and Implementation of a Low-Cost SCARA RobotDocument52 paginiDesign and Implementation of a Low-Cost SCARA RobotMustafaMir100% (2)
- Lecture 8 Robot Control StudentDocument52 paginiLecture 8 Robot Control StudentMustafa BüyükÎncă nu există evaluări
- Industrial Robotics - Programming Simulation and ApplicationsDocument700 paginiIndustrial Robotics - Programming Simulation and ApplicationsTO HaioceankÎncă nu există evaluări
- Industrial RoboticsDocument51 paginiIndustrial RoboticsArturs_LVÎncă nu există evaluări
- Robot Trajectory PlanningDocument15 paginiRobot Trajectory PlanningKoteswara RaoÎncă nu există evaluări
- De Es ZG561 PDFDocument59 paginiDe Es ZG561 PDFamareshhrÎncă nu există evaluări
- BITS Pilani Mechanisms and Robotics LectureDocument56 paginiBITS Pilani Mechanisms and Robotics Lecturebalaji ddbÎncă nu există evaluări
- Power Point Presentation On Robotics and ApplicationsDocument27 paginiPower Point Presentation On Robotics and Applicationsdeepika_164100% (3)
- Lecture Week2 2021 Cobot Basic ConceptsDocument33 paginiLecture Week2 2021 Cobot Basic ConceptsPaulo SantosÎncă nu există evaluări
- 2 Marks Question & AnswerDocument9 pagini2 Marks Question & AnswerShanmuga PriyaÎncă nu există evaluări
- Robot Programming TechniquesDocument32 paginiRobot Programming TechniquesDjuraTheHarpYÎncă nu există evaluări
- 16 Robotics 16Document15 pagini16 Robotics 16mohit130794Încă nu există evaluări
- Humanoid robot overviewDocument16 paginiHumanoid robot overviewShubham PundirÎncă nu există evaluări
- Retail Delmia v5r18 Digital Manufacturing PortfolioDocument20 paginiRetail Delmia v5r18 Digital Manufacturing PortfolioRilton Lima OliveiraÎncă nu există evaluări
- Robotics NotesDocument22 paginiRobotics NotesUpendra020% (1)
- 056 - ME8099, ME6010 Robotics - Question BankDocument6 pagini056 - ME8099, ME6010 Robotics - Question BanksathishskymechÎncă nu există evaluări
- Humanoid RoboticsDocument13 paginiHumanoid RoboticsWalter Shields100% (4)
- Robot Actuators & Feed Back ComponentsDocument25 paginiRobot Actuators & Feed Back ComponentsANONYMOUS PDFSÎncă nu există evaluări
- Introduction To ROBOTICSDocument25 paginiIntroduction To ROBOTICSNyandaMadili MalashiÎncă nu există evaluări
- Industrial Robotics: Robot Anatomy, Control, Programming & ApplicationsDocument30 paginiIndustrial Robotics: Robot Anatomy, Control, Programming & ApplicationsKiran VargheseÎncă nu există evaluări
- Universal Soft Pneumatic Robotic Gripper With Variable Effective LengthDocument6 paginiUniversal Soft Pneumatic Robotic Gripper With Variable Effective Lengthflv_91Încă nu există evaluări
- Facility Layout - Lecture NotesDocument42 paginiFacility Layout - Lecture NotesSame SamÎncă nu există evaluări
- Ch11Document20 paginiCh11Anonymous gcnVYyUb1Încă nu există evaluări
- Presentation On Robot Path PlanningDocument12 paginiPresentation On Robot Path PlanningdineshÎncă nu există evaluări
- Chapter 7 - Industrial RoboticDocument43 paginiChapter 7 - Industrial Roboticardhi bebi laksonoÎncă nu există evaluări
- Me 445 Groover Ch8 Industrial RoboticsDocument39 paginiMe 445 Groover Ch8 Industrial RoboticsSergio LedezmaÎncă nu există evaluări
- CH 8 Industrial RoboticsDocument20 paginiCH 8 Industrial RoboticsAnna Montes AngelesÎncă nu există evaluări
- Chapter 8Document41 paginiChapter 8realeboga moneiÎncă nu există evaluări
- Chapter 7 Computer Numerical ControlDocument57 paginiChapter 7 Computer Numerical Controltomocih624Încă nu există evaluări
- CH 18 Transfer Lines and Similar Automated Manufacturing SystemsDocument28 paginiCH 18 Transfer Lines and Similar Automated Manufacturing SystemsNabeel AhmadÎncă nu există evaluări
- Recent Advances in Robust Control - Theory and Applications in Robotics and ElectromechanicsDocument408 paginiRecent Advances in Robust Control - Theory and Applications in Robotics and ElectromechanicscemokszÎncă nu există evaluări
- Frontiers in Advanced Control SystemsDocument290 paginiFrontiers in Advanced Control SystemsSchreiber_DiesesÎncă nu există evaluări
- Robust Control Theory and ApplicationsDocument692 paginiRobust Control Theory and ApplicationscemokszÎncă nu există evaluări
- Recent Advances On Meta-Heuristics and Their Application To Real ScenariosDocument138 paginiRecent Advances On Meta-Heuristics and Their Application To Real ScenarioscemokszÎncă nu există evaluări
- Discrete Time SystemsDocument538 paginiDiscrete Time SystemscemokszÎncă nu există evaluări
- Fuzzy SystemsDocument226 paginiFuzzy SystemsZelalem GirmaÎncă nu există evaluări
- PID Controller Design Approaches - Theory Tuning and Application To Frontier AreasDocument298 paginiPID Controller Design Approaches - Theory Tuning and Application To Frontier AreasSchreiber_Dieses100% (2)
- Recent Advances in Robust Control - Novel Approaches and Design MethodsDocument474 paginiRecent Advances in Robust Control - Novel Approaches and Design MethodscemokszÎncă nu există evaluări
- Real-Time Systems Architecture Scheduling and ApplicationDocument348 paginiReal-Time Systems Architecture Scheduling and ApplicationcemokszÎncă nu există evaluări
- Fuzzy Logic - Controls Concepts Theories and ApplicationsDocument428 paginiFuzzy Logic - Controls Concepts Theories and ApplicationsSchreiber_Dieses100% (3)
- Model Predictive ControlDocument312 paginiModel Predictive ControlSyamsul Rizal Abd ShukorÎncă nu există evaluări
- Modeling Simulation and System Engineering Lecture PDFDocument40 paginiModeling Simulation and System Engineering Lecture PDFcemokszÎncă nu există evaluări
- Petri Nets - ApplicationsDocument762 paginiPetri Nets - ApplicationscemokszÎncă nu există evaluări
- Introduction To PID Controllers - Theory Tuning and Application To Frontier AreasDocument270 paginiIntroduction To PID Controllers - Theory Tuning and Application To Frontier AreasSchreiber_Dieses100% (6)
- Fuzzy Inference System - Theory and ApplicationsDocument518 paginiFuzzy Inference System - Theory and ApplicationsSchreiber_DiesesÎncă nu există evaluări
- Frontiers of Model Predictive ControlDocument168 paginiFrontiers of Model Predictive ControlcemokszÎncă nu există evaluări
- Textile and Clothing PDFDocument24 paginiTextile and Clothing PDFcemokszÎncă nu există evaluări
- Automotive Transmission - Lecture Notes Complete PDFDocument156 paginiAutomotive Transmission - Lecture Notes Complete PDFcemokszÎncă nu există evaluări
- Industrial Robotics Theory Modelling and ControlDocument964 paginiIndustrial Robotics Theory Modelling and Controlusmani.yusuf75% (4)
- System Modeling and Simulation PDFDocument519 paginiSystem Modeling and Simulation PDFcemoksz91% (32)
- Electric Machines and DrivesDocument274 paginiElectric Machines and Drivesachut01100% (1)
- Engineering Mechanics Dynami̇cs PDFDocument746 paginiEngineering Mechanics Dynami̇cs PDFcemoksz92% (12)
- Integration and Automation of Manufacturing SystemsDocument593 paginiIntegration and Automation of Manufacturing SystemsAlejo LalvayÎncă nu există evaluări
- Gear Rack Drive PDFDocument39 paginiGear Rack Drive PDFcemokszÎncă nu există evaluări
- Gear SlaytDocument120 paginiGear SlaytcemokszÎncă nu există evaluări
- Modeling and Simulation PDFDocument40 paginiModeling and Simulation PDFcemokszÎncă nu există evaluări
- Product Design and CadcamDocument22 paginiProduct Design and CadcamShaukat Ali ShahÎncă nu există evaluări
- Shafts CouplingsDocument12 paginiShafts CouplingsPiyoosh TyagiÎncă nu există evaluări
- Worm Gear PDFDocument15 paginiWorm Gear PDFcemoksz100% (6)
- Fis 533020e PDFDocument17 paginiFis 533020e PDFmarusea2009Încă nu există evaluări
- Tc3 Robotics Mxautomation: ManualDocument132 paginiTc3 Robotics Mxautomation: ManualArūnas TalvaševičiusÎncă nu există evaluări
- KR 210 R2700-2 TDSDocument1 paginăKR 210 R2700-2 TDSHarbhajan SinghÎncă nu există evaluări
- Automatic sandblasting machine operation instructionsDocument81 paginiAutomatic sandblasting machine operation instructionsNguyễn Quốc HọcÎncă nu există evaluări
- MA External Axis Box KR C4 Compact enDocument55 paginiMA External Axis Box KR C4 Compact enDave FansolatoÎncă nu există evaluări
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 paginiModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Georgiana BunghiuzÎncă nu există evaluări
- Ind Robotics - Digital MFG Tech - CTS2.0 - NSQF-3Document36 paginiInd Robotics - Digital MFG Tech - CTS2.0 - NSQF-3NALLAMUTHU SÎncă nu există evaluări
- Industrial Robot AnalysisDocument20 paginiIndustrial Robot AnalysiselkhawadÎncă nu există evaluări
- Using The Puma RobotDocument23 paginiUsing The Puma RobotRafaela Oliveira de AzevedoÎncă nu există evaluări
- Assessing Positioning Performance of Industrial RobotDocument19 paginiAssessing Positioning Performance of Industrial Robotdavev2005Încă nu există evaluări
- ARC Mate 100ib, M-6iB Mechanical Unit ManualDocument142 paginiARC Mate 100ib, M-6iB Mechanical Unit ManualPiotrÎncă nu există evaluări
- Robots SafetyDocument58 paginiRobots SafetyHIRWA YVAN MVUNABOÎncă nu există evaluări
- 3HAC023934 PS IRB 7600-EnDocument156 pagini3HAC023934 PS IRB 7600-EnDouglas BianchiÎncă nu există evaluări
- 3HAC056431 PS IRB 910SC-en PDFDocument56 pagini3HAC056431 PS IRB 910SC-en PDFjuam david ramirezÎncă nu există evaluări
- S4-Irb1400 M94a ProductDocument531 paginiS4-Irb1400 M94a ProductAnonymous smdEgZN2IeÎncă nu există evaluări
- Dobot Industrial BrochureDocument17 paginiDobot Industrial BrochureMihail AvramovÎncă nu există evaluări
- R-J3ib Controller Spot Tool+Document54 paginiR-J3ib Controller Spot Tool+PiotrÎncă nu există evaluări
- KR 180 R2500 extra controller teach pendant reach payloadDocument1 paginăKR 180 R2500 extra controller teach pendant reach payloadMohamad Dali AgamÎncă nu există evaluări
- The Maintenance Commissioning of FANUC M-1iA 05A TDocument6 paginiThe Maintenance Commissioning of FANUC M-1iA 05A TYoan RodriguezÎncă nu există evaluări
- Lab Part 03 Homework 01Document12 paginiLab Part 03 Homework 01ឆាម វ៉ាន់នូវÎncă nu există evaluări
- Spez LBR Iisy enDocument76 paginiSpez LBR Iisy enMatyas Takacs100% (1)
- Robotics SafetyDocument4 paginiRobotics SafetyFuzail AyazÎncă nu există evaluări
- Ir Unit 1Document9 paginiIr Unit 1Muthuvel MÎncă nu există evaluări
- FANUC-M-10iA Series - 13Document2 paginiFANUC-M-10iA Series - 13Nadir ChalinÎncă nu există evaluări
- LB RC PTDV Man - enDocument188 paginiLB RC PTDV Man - enMKSE MKSEÎncă nu există evaluări
- Paper 4317Document4 paginiPaper 4317Diana AlexandraÎncă nu există evaluări
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDocument48 paginiOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniÎncă nu există evaluări
- New Microsoft Word DocumentDocument21 paginiNew Microsoft Word Documentأحمد دعبسÎncă nu există evaluări
- 3HAC031045 OM General Safety Information-EnDocument60 pagini3HAC031045 OM General Safety Information-EnNicolas RomeroÎncă nu există evaluări
- Forward and Inverse Kinematics Model For PDFDocument6 paginiForward and Inverse Kinematics Model For PDFGuilherme SixeÎncă nu există evaluări