S-ar putea să vă placă și
- Acu PressureDocument26 paginiAcu PressureMuthuvel M100% (4)
- Computer Aided Manufacturing-UNIT-2Document20 paginiComputer Aided Manufacturing-UNIT-2Muthuvel M100% (4)
- COADocument137 paginiCOAThonta DariÎncă nu există evaluări
- Unit-2-Computer Aided DesignDocument42 paginiUnit-2-Computer Aided DesignMuthuvel M80% (5)
- Unit-3-Computer Aided DesignDocument21 paginiUnit-3-Computer Aided DesignMuthuvel M100% (5)
- General Introduction Introduction of Composites: Historical Development / Historical Overview: PastDocument514 paginiGeneral Introduction Introduction of Composites: Historical Development / Historical Overview: PastMuthuvel MÎncă nu există evaluări
- Unit-4-Computer Aided DesignDocument15 paginiUnit-4-Computer Aided DesignMuthuvel M100% (2)
- Integration and Automation of Manufacturing SystemsDocument593 paginiIntegration and Automation of Manufacturing SystemsAlejo LalvayÎncă nu există evaluări
- UNIT 4 MechatronicsDocument21 paginiUNIT 4 MechatronicsMuthuvel M100% (1)
- Unit 5 MetrologyDocument16 paginiUnit 5 MetrologyMuthuvel M100% (2)
- Unit 1 CadDocument29 paginiUnit 1 CadMuthuvel M82% (17)
- Unit 1 Metro LogyDocument9 paginiUnit 1 Metro LogyMuthuvel M100% (1)
- Unit 4 MetrologyDocument12 paginiUnit 4 MetrologyMuthuvel M89% (9)
- Radams ' 09Document370 paginiRadams ' 09Muthuvel M100% (1)
- Unit 3 MetrologyDocument38 paginiUnit 3 MetrologyMuthuvel M92% (36)
- Te Unit 4Document19 paginiTe Unit 4Muthuvel M100% (1)
- Unit 2 MetrologyDocument32 paginiUnit 2 MetrologyMuthuvel M83% (6)
- UNIT 3 MechatronicsDocument38 paginiUNIT 3 MechatronicsMuthuvel M67% (6)
- Unit 4 Me1203Document26 paginiUnit 4 Me1203Muthuvel MÎncă nu există evaluări
- UNIT 2 MechatronicsDocument35 paginiUNIT 2 MechatronicsMuthuvel M91% (11)
- UNIT 1 MechatronicsDocument15 paginiUNIT 1 MechatronicsMuthuvel M82% (17)
- Unit 2 Me1203Document20 paginiUnit 2 Me1203Muthuvel MÎncă nu există evaluări
- Te Unit 1Document20 paginiTe Unit 1Muthuvel MÎncă nu există evaluări
- UNIT 5 MechatronicsDocument16 paginiUNIT 5 MechatronicsMuthuvel M85% (27)
- Te Unit 3Document29 paginiTe Unit 3Muthuvel M100% (1)
- Te Unit 2Document22 paginiTe Unit 2krishnansriÎncă nu există evaluări
- Unit 5 Me1203Document25 paginiUnit 5 Me1203Muthuvel M100% (1)
- Unit 1 Me1203Document17 paginiUnit 1 Me1203Muthuvel M100% (1)
- Unit 3 Me1203Document25 paginiUnit 3 Me1203Muthuvel MÎncă nu există evaluări
- Unit 5 MTDocument17 paginiUnit 5 MTMuthuvel MÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Duoscreedgb 4vanaf1 10 2010Document16 paginiDuoscreedgb 4vanaf1 10 2010Sandeep YadavÎncă nu există evaluări
- 01 - SWG - Automatic Transfer Switches - (1.23 - 1.24)Document2 pagini01 - SWG - Automatic Transfer Switches - (1.23 - 1.24)ThilinaÎncă nu există evaluări
- Leviton 10X-FTPAZ Atlas-X1 Cat 6A FUTP CableDocument2 paginiLeviton 10X-FTPAZ Atlas-X1 Cat 6A FUTP CableHumberto BalderasÎncă nu există evaluări
- Especificaciones TRAMAC 125Document44 paginiEspecificaciones TRAMAC 125Alberto de la cruzÎncă nu există evaluări
- Training Report On VerilogDocument25 paginiTraining Report On VerilogSohail AnsariÎncă nu există evaluări
- Quiz 1 Data SheetDocument9 paginiQuiz 1 Data SheetKanz EmadÎncă nu există evaluări
- Samsung Cl21k40mqgxxaz Chassis Ks9c N RayDocument68 paginiSamsung Cl21k40mqgxxaz Chassis Ks9c N RayDavid Ocampo GonzalezÎncă nu există evaluări
- Inspection and Preventive Maintenance Procedures-78-81Document4 paginiInspection and Preventive Maintenance Procedures-78-81Christian Alexander100% (1)
- Compact & Supersilent: Elb43SdDocument2 paginiCompact & Supersilent: Elb43SdRodolfo Hernandez A.Încă nu există evaluări
- Stored Program Concept HOMEWORK FOR Y10-03-P13: Person DescriptionDocument3 paginiStored Program Concept HOMEWORK FOR Y10-03-P13: Person DescriptionHasaan AhmedÎncă nu există evaluări
- 01-11-ECX1 Conn Box Cable-02Document6 pagini01-11-ECX1 Conn Box Cable-02maverick11Încă nu există evaluări
- Medical Econet Elainrontgen EsiteDocument9 paginiMedical Econet Elainrontgen EsitePeter YliÎncă nu există evaluări
- Specifications: Horn LocationDocument14 paginiSpecifications: Horn LocationCarlos VelázquezÎncă nu există evaluări
- Minolta XD-11 repair guide breakdownDocument56 paginiMinolta XD-11 repair guide breakdownMala100% (1)
- Kristeel CatalogueDocument52 paginiKristeel CatalogueRam TejaÎncă nu există evaluări
- WEG Explosion Proof Motors Usep1027 Brochure English DC PDFDocument4 paginiWEG Explosion Proof Motors Usep1027 Brochure English DC PDFWilliam ChangÎncă nu există evaluări
- Safety Precaution: Parts ListDocument18 paginiSafety Precaution: Parts ListsilictronicÎncă nu există evaluări
- Literature Review of Automatic Night LampDocument5 paginiLiterature Review of Automatic Night Lampafmzvadopepwrb100% (1)
- Driving Controls Guide for FamiliarisationDocument175 paginiDriving Controls Guide for FamiliarisationpetarstarÎncă nu există evaluări
- Manual Insta718 728 828Document12 paginiManual Insta718 728 828Andrew PolÎncă nu există evaluări
- Preparing Group 1 RS2000 Rally CarsDocument6 paginiPreparing Group 1 RS2000 Rally CarsPhilip RiddlesÎncă nu există evaluări
- 2006 Hyundai Elantra GLS 2.0L Engine SpecsDocument277 pagini2006 Hyundai Elantra GLS 2.0L Engine SpecsSergio Roca100% (1)
- The Main Torque Boxes Are Made From CFRP Composite Material. The Structure Consists of Solid-Laminate Front andDocument2 paginiThe Main Torque Boxes Are Made From CFRP Composite Material. The Structure Consists of Solid-Laminate Front andumesh dongolÎncă nu există evaluări
- D48398 - E PowerWizard Options 4006-4016TAGDocument1 paginăD48398 - E PowerWizard Options 4006-4016TAGTTIBCCAÎncă nu există evaluări
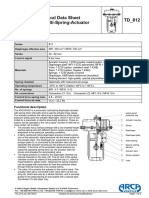
- TD - 812 - en - 05-2023 Actuator Datasheet ECOTROLDocument5 paginiTD - 812 - en - 05-2023 Actuator Datasheet ECOTROLlungelo.dlaminiÎncă nu există evaluări
- Presentation Basics OPTIX RTN (605, 610, 620)Document73 paginiPresentation Basics OPTIX RTN (605, 610, 620)Noman Sarwar100% (1)
- As 50 CustomDocument28 paginiAs 50 Customkar1270Încă nu există evaluări
- Oi Series Diagnostics For All AlarmsDocument2 paginiOi Series Diagnostics For All Alarmsrattan singhÎncă nu există evaluări
- AIR Conditioner: Installation ManualDocument47 paginiAIR Conditioner: Installation ManualBartosz MarciniakÎncă nu există evaluări
- BFR 226 EN 3 Black Flow Regulator G 3 - 4Document2 paginiBFR 226 EN 3 Black Flow Regulator G 3 - 4Shinya Takeda(武田 慎也)Încă nu există evaluări