Documente Academic
Documente Profesional
Documente Cultură
Cinetique Dynamique
Încărcat de
Hassan HallaouaTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cinetique Dynamique
Încărcat de
Hassan HallaouaDrepturi de autor:
Formate disponibile
Cintique et dynamique des
systmes de solides
Page 2/30
CINTIQUE des systmes matriels .......................................................... 3
1.) Notion de masse ................................................................................................. 3
2.) Centre de masse d'un ensemble matriel.......................................................... 4
3.) Torseurs cintique et dynamique...................................................................... 6
4.) nergie cintique ............................................................................................... 8
CINTIQUE du solide................................................................................. 9
1.) Oprateur d'inertie d'un solide......................................................................... 9
2.) Moments cintique et dynamique d'un solide................................................. 13
3.) Dtermination de l'nergie cintique d'un solide ........................................... 15
4.) Stratgies.......................................................................................................... 16
DYNAMIQUE du solide ............................................................................ 18
1.) Principe fondamental de la dynamique .......................................................... 18
2.) Thorme de l'nergie puissance.................................................................. 19
3.) Mouvements particuliers................................................................................. 21
4.) quilibrage....................................................................................................... 22
5.) Moteurs ............................................................................................................ 25
6.) Mthode gnrale d'tude des systmes de solides ......................................... 25
Page 3/30
CINTIQUE DES SYSTMES
MATRIELS
1.) NOTION DE MASSE
1.1.) Dfinition
La masse caractrise la quantit de matire. La reprsentation mathmatique associe est une mesure positive ou
nulle, compltement additive, dfinie sur un domaine E de l'espace.
e E alors m(e) 0
Quelle que soit la partition de E en n sous ensembles e
i
tels que :
E
1
+ e
2
+ + e
n
= E e
i
e
j
= i j
on peut crire :
m(E) =
i=1
n
m(e
i
) [4-1]
1.2.) Conservation de la masse
Si t
1
et t
2
sont les repres de deux instants quelconques, on dit que E est masse conservative si pour tout sous-
ensemble e de E, on a :
m(E,t
1
) = m(E,t
2
) [4-2]
1.3.) Solide matriel
Le solide matriel S est celui prcdemment dfini en cinmatique auquel on attribue une mesure positive de
masse. Le solide matriel est un systme masse conservative.
1.4.) Ensemble de solides matriels
Un ensemble E est un ensemble de solides matriels s'il n'est constitu que de solides matriels. En particulier, il
ne comporte ni fluide ni ressort. Sa masse est conservative.
1.5.) Thorme
Si E est un ensemble masse conservative et f
(P,t) une fonction vectorielle dfinie sur E, on dmontre que :
d
dt
|
|
|
|
|
|
PE
f
(P,t) dm
R
=
PE
|
|
|
|
d f
(P,t)
dt
R
dm [4-3]
Tous les systmes considrs par la suite sont des ensembles de solides matriels.
Page 4/30
2.) CENTRE DE MASSE D'UN ENSEMBLE MATRIEL
2.1.) Dfinition
Si le point G est le centre de masse d'un ensemble matriel E, il vrifie la relation :
PE
GP
dm = 0 [4-4]
2.2.) Unicit
Supposons que, pour un ensemble matriel E, il existe deux centres de masse G
1
et G
2
.
Si G
1
et G
2
sont centres de masse, ils vrifient respectivement :
E
G
1
P
dm = 0 et
P E
G
2
P
dm = 0
En faisant la diffrence, on obtient :
P E
(G
1
P
G
2
P
) dm = 0
P E
G
1
G
2
dm = 0
Le vecteur G
1
G
2
tant indpendant de l'intgration en P, on obtient :
G
1
G
2
P E
dm = 0
ou encore :
G
1
G
2
m(E) = 0
Ce qui implique que G
1
G
2
= 0, donc que G
1
est confondu avec G
2
.
2.3.) Dtermination
En se plaant en un point quelconque Q, on a : GP
= GQ
+ QP
En portant dans la relation de dfinition, il vient :
P E
GP
dm =
P E
GQ
dm +
P E
QP
dm = 0
Mais :
P E
GQ
dm = GQ
P E
dm = GQ
m(E)
d'o :
P E
QP
dm = m(E) QG
soit encore :
QG
=
1
m(E)
P E
QP
dm [4-5]
Page 5/30
2.4.) Partition
Plutt que de calculer directement l'intgrale sur E, il est souvent intressant de raliser une partition de E en n
sous-ensembles disjoints e
i
, de masse m
i
et de centre de masse respectif G
i
.
On a alors :
P E
QP
dm =
i=1
n
P ei
QP
dm =
i=1
n
m
i
QG
i
d'o la relation :
i=1
n
m
i
QG
=
i=1
n
m
i
QG
i
[4-6]
On peut faire de mme pour un ensemble E constitu d'un ensemble F auquel on a enlev p ensembles e
i
, de
masse m
i
et de centre de masse respectif G
i
. On obtient alors la relation :
PE
QP
dm =
P E
QP
dm
i=1
p
P ei
QP
dm = m(F) QG
F
i=1
p
m
i
QG
i
qui devient la formule dite "des masses ngatives" :
m(F)
i=1
p
m
i
] QG
= m(F) QG
F
i=1
p
m
i
QG
i
)
2.5.) Symtrie matrielle
On dit qu'il y a symtrie matrielle pour l'ensemble E si tout point P appartenant E correspond par symtrie
spatiale un point P' appartenant E tel que : dm(P) = dm(P')
S'il existe un lment de symtrie matrielle (plan ou axe) pour l'ensemble E, le point G appartient cet lment
de symtrie.
Si la symtrie matrielle est effective autour d'un point, c'est ncessairement le centre de masse.
La dmonstration est trs simple en prenant le point Q sur l'lment de symtrie matrielle.
2.6.) Remarques
En fixant un repre orthonorm R centr en O et en appliquant la formule de dfinition du centre de masse pour
Q = O on obtient : OG
=
1
m(E)
P E
OP
dm
En drivant cette expression dans R, il vient : m(E) |
|
|
|
|
|
dOG
dt
R
=
d
dt
|
|
|
|
|
|
P E
OP
dm
R
En appliquant le thorme relatif aux ensembles de solides matriels, on obtient :
m(E) |
|
|
|
|
|
dOG
dt
R
=
P E
|
|
|
|
|
|
dOP
dt
R
dm
ce qui devient :
m(E) V
(G/R) =
P E
V
(P/R) dm [4-7]
Cette intgrale est appele rsultante des quantits de mouvement pour l'ensemble E en mouvement par rapport
au repre R.
Page 6/30
Sous les mmes conditions, en drivant une seconde fois, on a :
m(E)
(G/R) =
P E
(P/R) dm [4-8]
Cette intgrale est appele rsultante des quantits dacclration pour l'ensemble E en mouvement par rapport
au repre R.
3.) TORSEURS CINTIQUE ET DYNAMIQUE
On considre le systme matriel E, de centre de masse G, en mouvement par rapport au repre R.
3.1.) Dfinition du torseur cintique
Le torseur cintique d'un ensemble matriel E dans son mouvement par rapport un repre R est dfini par :
C(E/R) =
I
|
P E
V
(P/R) dm = m(E) V
(G/R)
P E
IP
^ V
(P/R) dm =
(I,E/R)
Dans le mouvement de l'ensemble E par rapport R, la rsultante cintique est m(E) V
(G/R) et le moment
cintique en I est
(I,E/R). On vrifie facilement la relation torsorielle habituelle :
(B,E/R) =
(A,E/R) + m(E) V
(G/R) ^ AB
[4-9]
En faisant intervenir le centre de masse G et tout point I, on a :
(I,E/R) =
(G,E/R) + m(E) V
(G/R) ^ GI
3.1.a) Cas particuliers
Si l'ensemble matriel est de dimension suffisamment rduite par rapport aux autres systmes considrs, on
peut l'assimiler un point unique M de masse m. Le torseur cintique se rduit au glisseur :
C(M/R) =
M
|
|
m V
(M/R)
0
Si G est un point fixe dans R, le torseur cintique se rduit au couple : C(E/R) =
|
|
0
(G,E/R)
3.2.) Dfinition du torseur dynamique
D(E/R) =
I
|
P E
(P/R) dm = m(E)
(G/R)
P E
IP
(P/R) dm =
(I,E/R)
Dans le mouvement de l'ensemble E par rapport R, la rsultante dynamique est m(E)
(G/R) et le moment
dynamique en I est
(I,E/R). On vrifie facilement la relation torsorielle habituelle :
(B,E/R) =
(A,E/R) + m(E)
(G/R) ^ AB
[4-10]
En faisant intervenir le centre de masse G et tout point I, on a :
(I,E/R) =
(G,E/R) + m(E)
(G/R) ^ GI
Page 7/30
3.2.a) Cas particuliers
Si l'ensemble matriel est de dimension suffisamment rduite par rapport aux autres systmes considrs, on
peut l'assimiler un point unique M de masse m. Le torseur dynamique se rduit au glisseur :
D(M/R) =
M
|
|
m
(M/R)
0
Si G est un point fixe dans R, le torseur dynamique se rduit un couple : D(E/R) =
|
|
0
(G,E/R)
3.3.) Relation entre les moments cintique et dynamique
Reprenons l'expression du moment cintique :
(I,E/R) =
P E
IP
^ V
(P/R) dm
En drivant cette relation dans R et en appliquant le thorme relatif aux ensembles de solides matriels, on a :
|
|
|
| d
dt
(I,E/R)
R
=
P E
|
|
|
| d
dt
(IP
^ V
(P/R))
R
dm
En effectuant la drivation, il vient :
|
|
|
| d
dt
(I,E/R)
R
=
P E
|
|
|
|
|
|
dIP
dt
R
^ V
(P/R) dm +
P E
IP
^ |
|
|
|
|
|
dV
(P/R)
dt
R
dm
Exprimons :
|
|
|
|
|
|
dIP
dt
R
= V
(P/R) V
(I/R)
sans oublier que le point I est alors un point gomtrique. On obtient alors :
|
|
|
| d
dt
(I,E/R)
R
=
E
(V
(P/R) V
(I/R)) ^ V
(P/R) dm +
P E
IP
(P/R) dm
Le produit vectoriel de deux vecteurs identiques tant nul, il ne reste que :
|
|
|
| d
dt
(I,E/R)
R
=
P E
V
(I/R) ^ V
(P/R) dm +
P E
IP
(P/R) dm
En factorisant les termes indpendants des sommations et en appliquant les dfinitions, il vient :
|
|
|
| d
dt
(I,E/R)
R
= V
(I/R) ^ m(E) V
(G/R) +
(I,E/R)
D'o la relation :
(I,E/R) = |
|
|
| d
dt
(I,E/R)
R
+ m(E) V
(I/R) ^ V
(G/R) (I : point gomtrique) [4-11]
Remarque
Il est prfrable pour viter toute confusion de retenir cette relation sous la forme :
(I,E/R) = |
|
|
| d
dt
(I,E/R)
R
+ m(E) |
|
|
|
|
|
dOI
dt
R
^ V
(G/R) [4-12]
Dans dernire relation : O est l'origine du repre R et I un point gomtrique
Page 8/30
4.) NERGIE CINTIQUE
4.1.) Dfinition
L'nergie cintique d'un point P affect de la masse dm dans son mouvement par rapport un repre R est
donne par :
T(P/R) =
1
2
( V
(P/R))
2
dm
L'nergie cintique d'un ensemble matriel E en mouvement par rapport un repre R est alors :
2T(E/R) =
P E
(V
(P/R))
2
dm [4-13]
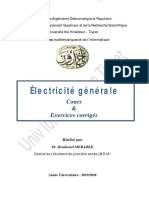
4.2.) Proprit
O
G
x
y
!
x
!
!
y
!
04-c03
On considre le repre R{O, x
, y
, z
} et le repre R'{G, x
, y
, z
} en
translation par rapport R. Pour tout point P on a :
V
(P/R) = V
(P/R') + V
(G/R)
En reportant dans la dfinition de l'nergie cintique, il vient :
2T(E/R) =
P E
(V
(P/R') + V
(G/R))
2
dm
En dveloppant, on a :
2T(E/R) =
P E
(V
(P/R'))
2
dm + 2
P E
V
(P/R') V
(G/R)
dm
+
P E
(V
(G/R))
2
dm
puis en factorisant :
2T(E/R) =
P E
(V
(P/R'))
2
dm
+ 2V
(G/R)
P E
V
(P/R') dm
+ m(E) ( V
(G/R)
2
)
Mais :
P E
V
(P/R') dm = m(E) V
(G/R') = 0
et donc :
2T(E/R) = 2T(E/R') + m(E) ( V
(G/R))
2
[4-14]
Ce dernier terme pouvant s'interprter comme l'nergie cintique du "point" G, affect de la masse totale, dans
son mouvement par rapport R.
Page 9/30
CINTIQUE du solide
1.) OPRATEUR D'INERTIE D'UN SOLIDE
1.1.) Rappel
Le solide matriel conserve videmment ses proprits cinmatiques. Il existe alors un torseur cinmatique
associ au mouvement de S par rapport un repre R :
V(S/R) =
O
|
(S/R)
V
(O,S/R)
Par dfinition le centre de masse G du solide est fixe dans S.
Remarque
Il ne faut videmment pas confondre torseur cinmatique et torseur cintique.
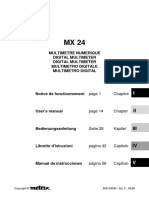
1.2.) Moment d'inertie d'un solide par rapport un axe
!
S
H
P
i
"
Q
x y
z
" "
"
04-c01
On considre un repre R{Q, x
, y
, z
}, un solide S et un axe dfini par
le point Q et le vecteur unitaire i
: = (Q, i
)
Le point P est un point de S et il a pour projection orthogonale sur le
point H.
Par dfinition du moment d'inertie de S par rapport un axe, on a :
I(,S) =
P S
(HP
)
2
dm.
Mais : ||HP
|| = || i
^ QP
||
d'o :
[HP
2
]
= ( i
^ QP
) ( i
^ QP
) = i
(QP
^ ( i
^ QP
))
On obtient alors :
I(,S) = i
PS
QP
^ ( i
^ QP
) dm [4-15]
1.3.) Dfinition de l'oprateur d'inertie d'un solide
On appelle oprateur d'inertie J au point Q d'un solide S l'oprateur qui, tout vecteur u
de l'espace, associe le
vecteur
PS
QP
^ ( u
^ QP
) dm.
On note : J (Q,S) u
PS
QP
^ ( u
^ QP
) dm [4-16]
Le moment d'inertie de S par rapport dfini par (Q, i
) a pour expression : I(,S) = i
J (Q,S) i
Dans un repre R{O, x
, y
, z
}, l'oprateur J (Q,S) s'exprime par une matrice 3 x 3.
Page 10/30
1.4.) Expression de l'oprateur d'inertie d'un solide
Exprimons dans un repre R{O, x
, y
, z
} les vecteurs intervenant dans la dfinition de l'oprateur J (Q,S) :
QP
= x x
+ y y
+ z z
= u
1
x
+ u
2
y
+ u
3
z
En calculant le double produit vectoriel, on a :
QP
^ [ u
^QP
] = [u
1
(y
2
+z
2
)u
2
x yu
3
x z] x
+ [u
2
(x
2
+z
2
)u
3
y zu
1
x y] y
+ [u
3
(x
2
+y
2
)u
1
x zu
2
y z] z
En effectuant l'intgration et en factorisant les termes indpendants du point P, il vient :
PS
QP
^ ( u
^ QP
) dm = (u
1
PS
(y
2
+z
2
) dm) u
2
PS
xy dm u
3
PS
xz dm) x
+ ( u
1
PS
x y dm + u
2
PS
(x
2
+z
2
) dm u
3
PS
y z dm) y
+ ( u
1
PS
x z dm u
2
PS
y z dm + u
3
PS
(x
2
+y
2
) dm) z
C'est bien le produit d'une matrice par le vecteur u
.
L'expression de la matrice est :
J (Q,S) =
\
|
|
|
[
)
j
j
j
P S
(y
2
+ z
2
) dm
P S
x y dm
P S
x z dm
P S
x y dm
P S
(x
2
+ z
2
) dm
P S
y z dm
P S
x z dm
P S
y z dm
P S
(x
2
+ y
2
) dm
R
Pour faciliter l'criture de cet oprateur, on pose conventionnellement :
J (Q,S) =
\
|
[
)
j
A F E
F B D
E D C
R
[4-17]
Le vecteur i
s'exprime dans le repre R par : i
= i
1
x
+ i
2
y
+ i
3
z
On obtient alors :
I(,S) = A i
1
2
+ B i
2
2
+ C i
3
2
2 D i
2
i
3
2 E i
1
i
3
2 F i
1
i
2
Cette expression est une forme bilinaire symtrique associe l'ellipsode :
A x
2
+ B y
2
+ C z
2
2 D y z 2 E x z 2 F x y = k
2
Si le vecteur i
de l'axe est gal x
, on a : I(,S) = A
Ceci permet d'interprter les composantes de la matrice d'inertie :
A est le moment d'inertie de S par rapport l'axe (Q, x
)
B est le moment d'inertie de S par rapport l'axe (Q, y
)
C est le moment d'inertie de S par rapport l'axe (Q, z
)
D est le produit d'inertie de S par rapport aux plans (Q, x
, y
) et (Q, x
, z
)
E est le produit d'inertie de S par rapport aux plans (Q, x
, y
) et (Q, y
, z
)
F est le produit d'inertie de S par rapport aux plans (Q, x
, z
) et (Q, x
, z
).
Il est noter que tous ces termes sont homognes au produit d'une masse et d'une longueur au carr.
Page 11/30
Il est galement commode, dans certains calculs de poser :
X X =
PS
x
2
dm Y Y =
PS
y
2
dm Z Z =
PS
z
2
dm
X Y =
PS
x y dm Y Z =
PS
y z dm Z X =
PS
z x dm
avec les relations : A = Y Y + Z Z B = Z Z + X X C = X X + Y Y
D = Y Z E = Z X F = X Y
1.5.) Moment d'inertie polaire
Le moment d'inertie polaire en Q du solide S est dfini par : I(Q,S) =
PS
(x
2
+ y
2
+ z
2
) dm
C'est la moiti de la trace de la matrice J (Q,S) :
I(Q,S) =
1
2
(A + B + C)
En utilisant les conventions prcdentes, c'est aussi :
I(Q,S) = X X + Y Y + Z Z
1.6.) Dfinitions
On dit qu'un repre est principal d'inertie si l'oprateur J (Q,S) exprim dans cette base est tel que les produits
dinertie D = E = F sont nuls. L'oprateur J (Q,S) a alors une forme diagonale et la base associe au repre est
une base propre. Cette base est orthonorme.
Lorsque l'oprateur d'inertie est exprim au centre de masse point G du solide S, les lments correspondants
de l'oprateur J (G,S) sont dits centraux.
Dans un repre de centre G, dont la base est propre pour l'oprateur d'inertie, les lments sont dits centraux
principaux d'inertie.
1.7.) Symtrie matrielle
04-c02
z
!
y
!
x
!
P(x,y,z)
P(x,y,-z)
Si le solide S admet un plan de symtrie matrielle, l'expression
de l'oprateur d'inertie dans un repre dont deux axes sont dans
ce plan, a deux produits d'inertie nuls.
Si le solide S admet deux plans de symtrie perpendiculaires,
l'expression de l'oprateur d'inertie dans un repre centr sur
l'intersection de ces plans et dont les axes sont dans ces plans, a
trois produits d'inertie nuls. Ce repre est propre pour l'oprateur
d'inertie.
Page 12/30
1.8.) Solide symtrie matrielle de rvolution
04-c04
z
!
O
Un solide symtrie matrielle de rvolution possde ncessairement deux
plans de symtrie matrielle perpendiculaires qui se coupent sur l'axe de
rvolution. Les lments non diagonaux sont donc nuls pour tout repre centr
sur l'axe de rvolution admettant le vecteur directeur de cet axe comme
vecteur de base.
Par exemple, dans un R{O, x
, y
, z
}, tout solide S de symtrie matrielle de
rvolution autour de l'axe (O, z
), est associ en O, un oprateur de la forme :
J (O,S) =
\
|
[
)
j
A 0 0
0 A 0
0 0 C
R
1.9.) Thorme de HUYGENS
Reprenons la dfinition de l'oprateur J (Q,S) : J (Q,S) u
PS
QP
^ ( u
^ QP
) dm
Faisons apparatre le point G, centre de masse de S : QP
= QG
+ GP
on obtient :
QP
^ ( u
^ QP
) = (QG
+ GP
) ^ ( u
^ (QG
+ GP
))
= QG
^ ( u
^ QG
) + QG
^ ( u
^ GP
) + GP
^ ( u
^ QG
) + GP
^ ( u
^ GP
)
On reporte dans l'expression de J (Q,S) et en tenant compte des termes ne dpendant pas des sommations, on a :
J (Q,S) u
= QG
^ ( u
^ QG
PS
dm + QG
^ ( u
PS
GP
dm) +
PS
GP
dm ^ ( u
^ QG
) +
PS
GP
^ ( u
^ GP
) dm
Mais, par dfinition du centre de masse :
PS
GP
dm = 0
On a donc : J (Q,S) u
= m(S) QG
^ ( u
^ QG
) +
PS
GP
^ ( u
^ GP
) dm
soit : J (Q,S) u
= m(S) QG
^ ( u
^ QG
) + J (G,S) u
En notant J (Q,G(m(S))) l'oprateur d'inertie au point Q, du "point" G affect de la masse totale m(S), on
obtient :
J (Q,S) = J (G,S) + J (Q,G(m(S))) [4-18]
En posant : GQ
= a x
+ b y
+ c z
on obtient :
A
Q
= A
G
+ m(S) (b
2
+ c
2
) B
Q
= B
G
+ m(S) (a
2
+ c
2
) C
Q
= C
G
+ m(S) (a
2
+ b
2
)
D
Q
= D
G
+ m(S) b c E
Q
= E
G
+ m(S) a c F
Q
= F
G
+ m(S) a b
X X
Q
= X X
G
+ m(S) a
2
Y Y
Q
= Y Y
G
+ m(S) b
2
Z Z
Q
= Z Z
G
+ m(S) c
2
X Y
Q
= X Y
G
+ m(S) a b Y Z
Q
= Y Z
G
+ m(S) b c X Z
Q
= X Z
G
+ m(S) a c
Pour faire le mme type de calcul entre deux point quelconques, il faut appliquer deux fois la relation
prcdente, en faisant ncessairement intervenir le point G.
Il est d'usage que le point Q et le repre R soient fixes dans S. Les diffrents termes sont alors indpendants du
temps. Il peut cependant tre parfois utile de pas tenir compte de ces usages. Il ne faut alors pas s'tonner si le
tenseur d'inertie est une fonction du temps, le plus souvent par l'intermdiaire des paramtres de position.
Page 13/30
1.10.) Changement de base
On considre un solide S et deux repres de mme origine : R{O, x
, y
, z
} et R
1
{O,x
1
, y
1
, z
1
}. On suppose que
l'oprateur J (O,S) est connu dans le repre R.
La matrice de passage de R R
1
prsente, en colonne, les composantes des vecteurs de base de R
1
dans R. On
note cette matrice P(R,R
1
).
J (O,S)
R
1
= P
1
(R,R
1
) J (O,S)
R
P(R,R
1
) [4-19]
Cette relation prcise la qualit tensorielle de J (O,S). On parle alors du tenseur d'inertie en O du solide S. Les
composantes doivent tre indiques sur la base qui a servi au calcul et qui doit tre prcise derrire le tableau.
Dans tout changement de base de ce type, il convient de vrifier que la trace de l'oprateur, reprsentant le
moment d'inertie polaire, reste bien une constante.
1.11.) Remarque
Si au point P de coordonnes (x,y,z), on associe la matrice antisymtrique :
A(P) =
\
|
[
)
j
0 z y
z 0 x
y x 0
On obtient, sous forme symbolique :
J (Q,S) =
PS
A(P)
t
A(P) dm
2.) MOMENTS CINTIQUE ET DYNAMIQUE D'UN SOLIDE
2.1.) Cas gnral
Le repre de rfrence est R. Soient :
G le centre de masse du solide S
Q le point o est calcul l'oprateur d'inertie de S et o est connu le torseur cinmatique
P le point courant de S
I un point quelconque de l'espace ventuellement mobile par rapport R.
Le torseur cinmatique associ au mouvement de S par rapport un repre R est :
V(S/R) =
Q
|
(S/R)
V
(Q,S/R)
Par changement de point, on a :
V
(P,S/R) = V
(Q,S/R) +
(S/R) ^ QP
Calculons le moment cintique en I en appliquant la dfinition :
(I,S/R) =
PS
IP
^ V
(P,S/R) dm
et remplaons :
(I,S/R) =
PS
IP
^ (V
(Q,S/R) +
(S/R) ^ QP
) dm
Soit, en dveloppant :
(I,S/R) =
PS
IP
^ V
(Q,S/R) dm +
PS
IP
^ (
(S/R) ^ QP
) dm
Page 14/30
En introduisant le point Q et en factorisant, il vient :
(I,S/R) =
PS
IP
dm ^ V
(Q,S/R) +
PS
(IQ
+ QP
) ^ (
(S/R) ^ QP
) dm
puis :
(I,S/R) = m(S) IG
^ V
(Q,S/R) + IQ
^ (
(S/R) ^
PS
QP
dm) +
S
QP
^ (
(S/R) ^ QP
) dm
On obtient alors la relation :
(I,S/R) = m(S) IG
^ V
(Q,S/R) + m(S)IQ
^ (
(S/R) ^ QG
) + J (Q,S)
(S/R) [4-20]
Pour effectuer le produit J (Q,S)
(S/R), il est essentiel d'exprimer l'oprateur et le vecteur dans une mme base,
qui n'est pas ncessairement R.
2.2.) Cas particuliers
Si Q = G
(I,S/R) = m(S) IG
^ V
(G,S/R) + J (G,S)
(S/R) [4-21]
Si Q = I
(I,S/R) = m(S) IG
^ V
(I,S/R) + J (I,S)
(S/R) [4-22]
Si Q = I fixe dans R
(I,S/R) = J (I,S)
(S/R)I fixe dans R [4-23]
Si Q = I = G
(G,S/R) = J (G,S)
(S/R) [4-24]
Ces deux dernires relations sont bien souvent les plus faciles mettre en oeuvre.
2.3.) Moment dynamique
On obtient le moment dynamique partir du moment cintique par la relation prcdemment tablie pour un
ensemble de solides matriels :
(I,S/R) = |
|
|
| d
dt
(I,S/R)
R
+ m(S) V
(I/R) ^ V
(G/R) (I : un point gomtrique)
En particulier, si I = G, elle devient :
(G,S/R) = |
|
|
| d
dt
(G,S/R)
R
[4-25]
De mme, si I est fixe dans R, on a :
(I,S/R) = |
|
|
| d
dt
(I,S/R)
R
Le point I est fixe dans R [4-26]
Page 15/30
3.) DTERMINATION DE L'NERGIE CINTIQUE D'UN SOLIDE
3.1.) Relation gnrale
Le repre de rfrence est R. Appelons G le centre de masse du solide S auquel appartiennent les points P et Q.
Le torseur cinmatique associ au mouvement de S par rapport un repre R est :
V(S/R) =
Q
|
(S/R)
V
(Q,S/R)
Par changement de point, on a :
V
(P,S/R) = V
(Q,S/R) +
(S/R) ^ QP
En appliquant la dfinition, l'nergie cintique est :
2T(S/R) =
PS
[V
(P,S/R)]
2
dm
Calculons [V
(P,S/R)]
2
, en faisant intervenir le point Q
:
[V
(Q,S/R) +
(S/R) ^ QP
]
2
=
[ V
(Q,S/R)]
2
+ 2 V
(Q,S/R) (
(S/R) ^ QP
) +
(
(S/R) ^ QP
)(
(S/R) ^ QP
)
En utilisant les proprits du produit mixte pour ce dernier terme on a :
(
(S/R) ^ QP
) (
(S/R) ^ QP
) =
(S/R)[QP
^ (
(S/R) ^ QP
)]
En reportant dans l'expression de l'nergie cintique on obtient :
2T(S/R) = [ V
(Q,S/R)]
2
PS
dm + 2 V
(Q,S/R) (
(S/R) ^
PS
QP
dm) +
(S/R)
PS
QP
^ (
(S/R) ^ QP
) dm
d'o la relation :
2T(S/R) =m(S)[ V
(Q,S/R)]
2
+
(S/R) J (Q,S)
(S/R) + 2 m(S) (V
(Q,S/R),
(S/R),QG
) [4-27]
3.2.) Cas particuliers
Si Q = G
2T(S/R) = m(S) [ V
(G,S/R)]
2
+
(S/R) J (G,S)
(S/R) [4-28]
Si le point Q est fixe dans R
2T(S/R) =
(S/R) J (Q,S)
(S/R)Q fixe dans R [4-29]
3.3.) Autre relation
Reprenons la dfinition de l'nergie cintique : 2T(S/R) =
PS
[V
(P,S/R) ]
2
dm
et remplaons le premier V
(P,S/R) du carr scalaire : 2T(S/R) =
PS
(V
(Q,S/R) +
(S/R) ^ QP
) V
(P,S/R) dm
soit : 2T(S/R) = V
(Q,S/R)
PS
V
(P,S/R)
dm +
PS
(
(S/R) ^ QP
) V
(P,S/R)
dm
Page 16/30
En changeant l'ordre des oprateurs dans le produit mixte :
2T(S/R) = V
(Q,S/R)
PS
V
(P,S/R)
dm +
PS
(S/R) (QP
^ V
(P,S/R)) dm
puis :
2T(S/R) = V
(Q,S/R)
PS
V
(P,S/R) dm +
(S/R)
PS
QP
^ V
(P,S/R) dm
Ceci reprsente le comoment des torseurs cinmatique et cintique relatifs au solide S dans son mouvement par
rapport R :
2T(S/R) = V(S/R) C(S/R) [4-30]
4.) STRATGIES
4.1.) Introduction
Les calculs de cintique sont souvent longs et difficiles mener. Il convient donc de ne calculer que les lments
strictement ncessaires.
Il est plus simple de changer le repre d'un vecteur que de changer celui de l'oprateur.
4.2.) Calcul du moment dynamique pour un solide
Soit un solide S, de masse m, de centre de masse G, auquel est associ le repre R{G, x
, y
, z
}, en mouvement
par rapport un repre R
0
{O,x
0
, y
0
, z
0
}. Soit, s'il existe, A un point de S fixe dans R
0
. Le point Q dsigne tout
autre point de S. On suppose connu le torseur cinmatique : V(S/R
0
) =
G
|
|
|
|
(S/R
0
)
V
(G,S/R
0
)
J (G,S)
J (A,S) = J (G,S) + J (A,G(m))
(G,S/R
0
) = J (G,S)
(S/R
0
)
(A,S/R
0
)= J (A,S)
(S/R
0
)
(A,S/R
0
)=
(G,S/R
0
) + m V
(G,S/R
0
) ^ GA
(G,S/R
0
) = |
|
|
| d
dt
(G,S/R
0
)
R
0
(A,S/R
0
) = |
|
|
| d
dt
(A,S/R
0
)
R
0
(A,S/R
0
) =
(G,S/R
0
) + m
(G,S/R
0
)^ GA
(Q,S/R
0
) =
(G,S/R
0
) + m
(G,S/R
0
) ^ GQ
(Q,S/R
0
) =
(A,S/R
0
) + m
(G,S/R
0
) ^ AQ
le passage :
(Q,S/R
0
) = |
|
|
| d
dt
(Q,S/R
0
)
R
0
+ m V
(Q/R
0
) ^ V
(G/R
0
) (Q : point gomtrique) est galement possible.
Page 17/30
4.3.) Recherche d'une composante du moment dynamique
On suppose que l'on ne doivent chercher qu'une seule projection du moment dynamique sur u
appartenant un
repre R
1
. On a alors :
d
dt
(
(A,S/R
0
) u
) = u
|
|
|
| d
dt
(A,S/R
0
)
R
0
+
(A,S/R
0
)
|
|
|
|
d u
dt
R
0
La drive de u
est :
|
|
|
|
d u
dt
R
0
=
(R
1
/R
0
) ^ u
Si de plus, on peut appliquer :
(A,S/R
0
) = |
|
|
| d
dt
(A,S/R
0
)
R
0
on a :
d
dt
(
(A,S/R
0
) u
) =
(A,S/R
0
) u
+ (
(A,S/R
0
),
(R
1
/R
0
), u
)
soit :
(A,S/R
0
) u
=
d
dt
(
(A,S/R
0
) u
) (
(A,S/R
0
),
(R
1
/R
0
), u
)
Le produit mixte est nul dans de nombreux cas, en particulier si R
1
= R
0
. Il faut faire trs attention aux
hypothses conduisant cette formule.
4.4.) Ensemble de solides
Pour un ensemble de n solides E = 1 + 2 ++ n, on a :
4.4.a) Torseur cintique
C(E/R
0
) =
i=1
i=n
C(i/R
0
) =
I
|
|
m
i
V
(G
i
,i/R
0
) = m(E) V
(G(E)/R
0
)
i=1
i=n
(I,i/R
0
)
4.4.b) Torseur dynamique
D(E/R
0
) =
i=1
i=n
D(i/R
0
) =
I
|
|
m
i
(G
i
,i/R
0
) = m(E)
(G(E)/R
0
)
i=1
i=n
(I,i/R
0
)
4.4.c) nergie cintique
2T(E/R
0
) =
i=1
i=n
2T(i/R
0
)
Page 18/30
DYNAMIQUE du solide
1.) PRINCIPE FONDAMENTAL DE LA DYNAMIQUE
1.1.) nonc
Il existe au moins un repre R
g
, dit repre galilen tel que, pour tout sous-ensemble e d'un ensemble matriel E,
le torseur dynamique de e soit gal au systme d'actions mcaniques exerces par l'extrieur sur e.
La rfrence ce principe est souvent abrg en PFD. On note :
T( e
-
/e) = D(e/R
g
) PFD [5-31]
1.2.) Repre galilen
Un repre galilen approch est un repre li la Terre. Dans un volume suffisamment rduit, le principe
fondamental de la dynamique est vrifi.
Il n'est cependant pas question d'tudier dans un tel repre le mouvement Terre-Soleil. On utilise alors le repre
de COPERNIC, dont l'origine est au centre de masse du Soleil et dont les directions sont donnes par trois
toiles suffisamment loignes pour tre considres comme "fixes".
On peut galement utiliser un repre gocentrique, de centre le centre de masse de la Terre et dont les directions
sont celles des trois toiles. On considre alors la Terre comme un systme isol.
Le paramtre temps est interprt de faon classique, c'est--dire non relativiste.
1.3.) Consquences vectorielles
Le principe fondamental de la dynamique se traduit par deux quations vectorielles.
La premire est appele quation de la rsultante dynamique et la seconde quation du moment dynamique.
On prendra bien soin d'exprimer tous ces torseurs au mme point avant d'crire cette dernire quation.
Dans l'espace, cela se traduit par six quations scalaires par sous-ensemble considr.
Lorsque le problme est considr comme plan, c'est--dire que toutes les actions mcaniques sont
reprsentables par des glisseurs coplanaires ou des couples d'axes perpendiculaires ce plan et que tous les
dplacements se font dans ce plan, on obtient trois quations scalaires par sous-ensemble considr.
1.4.) Thorme des actions rciproques
Considrons un ensemble matriel E et une partition de E en e
1
et e
2
. On a alors : E = e
1
+ e
2
L'ensemble E est en mouvement par rapport un repre galilen R
g
.
Appliquons successivement le PFD e
1
, e
2
et E :
T(e
1
-
/e
1
) = D(e
1
/R
g
) T(e
2
-
/e
2
) = D(e
2
/R
g
) T( E
-
/E) = D(E/R
g
)
Mais les actions extrieures e
1
sont constitues des actions de e
2
sur e
1
et des actions extrieures E sur e
1
:
T(e
1
-
/e
1
) = T(e
2
/e
1
) + T( E
-
/e
1
) do
T(e
2
/e
1
) + T( E
-
/e
1
) = D(e
1
/R
g
)
Il en est de mme pour e
2
:
T(e
2
-
/e
2
) = T(e
1
/e
2
) + T( E
-
/e
2
)
d'o : T(e
1
/e
2
) + T( E
-
/e
2
) = D(e
2
/R
g
)
On peut alors crire :
Page 19/30
T(e
2
/e
1
) + T( E
-
/e
1
) + T(e
1
/e
2
) + T( E
-
/e
2
) = D(e
1
/R
g
) + D(e
2
/R
g
)
Mais :
D(e
1
/R
g
) + D(e
2
/R
g
) = D(E/R
g
)
T(
E
-
/e
1
) + T( E
-
/e
2
) = T( E
-
/E)
Appliquons le PFD pour E, on obtient :
T(e
2
/e
1
) + T(e
1
/e
2
) = 0 [5-32]
Remarque
En appliquant le PFD un systme de solides, on dduit le thorme des actions rciproques.
1.5.) Cas particuliers
Lorsque le torseur dynamique associ un ensemble matriel est nul, le principe fondamental de la dynamique
s'crit comme le principe fondamental de la statique.
C'est le cas si :
la masse de l'ensemble est nulle (ou considre comme telle)
l'ensemble matriel est immobile par rapport un repre galilen.
2.) THORME DE L'NERGIE PUISSANCE
2.1.) Cas d'un solide
Le torseur cinmatique du mouvement de S par rapport un repre galilen R
g
est V(S/R
g
).
Reprenons le PFD appliqu un solide S en mouvement par rapport R
g
: T( S
-
/S) = D(S/R
g
)
Multiplions par le torseur cinmatique du mouvement de S/R
g
: T( S
-
/S) V(S/R
g
) = D(S/R
g
) V(S/R
g
)
Le premier membre reprsente la puissance dveloppe par les efforts extrieurs S dans son mouvement par
rapport R
g
: (voir la statique)
T( S
-
/S) V(S/R
g
) = P( S
-
,S/R
g
)
Explicitons le second membre, en un point A appartenant au solide S :
D(S/R
g
) V(S/R
g
) =
A
|
PS
(P,S/R
g
) dm
PS
AP
(P,S/R
g
) dm
=
A
|
|
|
|
(S/R
g
)
V
(P,S/R
g
) +
(S/R
g
) ^ PA
ou encore :
D(S/R
g
) V(S/R
g
) =
PS
(P,S/R) ( V
(P,S/R
g
) +
(S/R
g
) ^ PA
) + (AP
(P,S/R
g
) )
(S/R
g
) dm
La somme des deux produits mixtes est nulle et il reste :
D(S/R
g
) V(S/R
g
) =
PS
(P,S/R) V
(P,S/R
g
) dm
Remplaons :
(P,S/R) = |
|
|
|
|
|
dV
(P,S/R
g
)
dt
R
g
Page 20/30
pour obtenir :
D(S/R
g
) V(S/R
g
) =
PS
|
|
|
|
|
|
dV
(P,S/R
g
)
dt
R
g
V
(P,S/R
g
) dm
Une intgration partielle sous le signe somme permet d'crire :
D(S/R
g
) V(S/R
g
) =
1
2
PS
d(V
(P,S/R
g
))
2
dt
dm
La distributivit des oprateurs, en appliquant le thorme de conservation de la masse donne :
D(S/R
g
) V(S/R
g
) =
1
2
d
dt
[
PS
(V
(P,S/R
g
))
2
dm]
En utilisant l'nergie cintique, on obtient :
D(S/R
g
) V(S/R
g
) =
dT(S/R
g
)
dt
d'o la relation caractrisant le thorme de la puissance pour un solide :
dT(S/R
g
)
dt
= P( S
-
,S/R
g
) [5-33]
La drive temporelle de l'nergie cintique d'un solide S dans son mouvement par rapport au repre galilen R
g
,
est gale la puissance dveloppe par les efforts extrieurs S dans son mouvement par rapport R
g
.
Le thorme de lnergie puissance fournit une seule quation scalaire, linairement dpendante des quations
dduites du PFD.
2.2.) Cas de deux solides
Soient un systme matriel E = S
1
+ S
2
en mouvement par rapport un repre R
g
. Appliquons le thorme de la
puissance S
1
:
dT(S
1
/R
g
)
dt
= P(S
1
-
,S
1
/R
g
)
Il en est de mme avec S
2
:
dT(S
2
/R
g
)
dt
= P(S
2
,S
2
/R
g
)
En exprimant les puissances, on a :
P(S
1
-
,S
1
/R
g
) = T(S
1
-
/S
1
) V(S
1
/R
g
) P(S
2
-
,S
2
/R
g
) = T(S
2
-
/S
2
) V(S
2
/R
g
)
Mais :
T(S
1
-
/S
1
) = T( E
-
/S
1
) + T(S
2
/S
1
) T(S
2
-
/S
2
) = T( E
-
/S
2
) + T(S
1
/S
2
)
Comme :
dT(S
1
/R
g
)
dt
+
dT(S
2
/R
g
)
dt
=
dT(E/R
g
)
dt
T(S
1
/S
2
) = T(S
2
/S
1
)
On obtient la relation finale, valable dans le cas de deux solides :
dT(E/R
g
)
dt
=
i=1
i=2
T( E
-
/S
i
) V(S
i
/R
g
) + T(S
1
/S
2
) V(S
2
/S
1
)
Le terme T(S
1
/S
2
) V(S
2
/S
1
) s'interprte comme la puissance dveloppe par les interefforts dans la liaison
entre les solides S
1
et S
2
.
La sommation correspond la puissance dveloppe par les actions extrieures au systme matriel E.
Page 21/30
2.3.) Gnralisation
On gnralise la relation prcdente pour un systme matriel E constitu de n solides, par la relation :
dT(E/R
g
)
dt
=
i=1
i=n
T( E
/S
i
) V(S
i
/R
g
) +
i=1
i=n
j=1
j=i
T(S
i
/S
j
) V(S
j
/S
i
)
La premire sommation correspond la puissance des actions extrieures E :
P( E
-
,E/R
g
) =
i=1
i=n
T( E
-
/S
i
) V(S
i
/R
g
)
La seconde dcrit la puissance des actions mcaniques intrieures E :
P
i
(E) =
i=1
i=n
j=1
j=i
T(S
i
/S
j
) V(S
j
/S
i
)
On a donc :
dT(E/R
g
)
dt
= P( E
-
,E/R
g
) + P
i
(E) [5-34]
Le thorme de la puissance s'nonce alors :
La drive par rapport au temps de l'nergie cintique galilenne d'un ensemble de solides est gale la
puissance galilenne des actions mcaniques extrieures et intrieures cet ensemble de solides.
Remarques
Ce thorme est d'usage dlicat lorsque la puissance des actions intrieures E n'est pas nulle.
On ne doit prendre en compte que les puissances mcaniques.
2.4.) Thorme de l'nergie
Le thorme de la puissance ne fournit qu'une seule quation scalaire, linairement dpendante des quations
dduites du PFD.
Elle fournit une intgrale premire, appele thorme de l'nergie, si :
La puissance dveloppe est nulle. On obtient alors :
dT(E/R
g
)
dt
= 0
et l'nergie cintique T(E/R
g
) est constante.
La puissance dveloppe drive d'une fonction U. Une intgration donne :
T(E/R
g
) = U + H
o H est une constante d'intgration. C'est en particulier le cas quand les seules puissances mises en jeu sont
celles des actions de pesanteur.
3.) MOUVEMENTS PARTICULIERS
3.1.) Solide en rotation autour d'un point fixe du galilen
Soit un solide S en mouvement autour d'un point fixe O d'un repre R
g
suppos galilen.
Le principe fondamental de la dynamique permet d'crire :
(O,S/R
g
) = |
|
|
| d
dt
(G,S/R
g
)
R
g
= M
(O, S
-
/S)
Si le moment est nul, alors la variation de moment cintique est nulle et
(O,S/R
g
) est un vecteur constant
dans R
g
.
Si la projection du moment des forces extrieures sur u
fixe dans R
g
, est nulle, alors la projection de
(O,S/R
g
) sur u
est constante.
Page 22/30
3.2.) Solide en mouvement autour d'un axe fixe du galilen
Soient u
le vecteur unitaire d'un axe fixe par rapport un repre R
g
suppos galilen et O un point de l'axe.
Si, au cours du temps :
la rsultante des actions mcaniques extrieures est nulle, alors le vecteur V
(G,S/R
g
) est constant dans R
g
.
la projection de la rsultante des actions mcaniques extrieures sur le vecteur u
est nulle, alors le scalaire gal
u
(G/R
g
) est une constant dans R
g
.
la projection du moment des actions mcaniques extrieures sur le vecteur u
est nulle, alors le scalaire gal
u
(O,S/R
g
) est une constante dans R
g
.
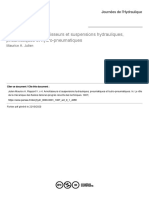
4.) QUILIBRAGE
4.1.) Hypothses
On considre un bti 0 auquel est attach le repre galilen R
g
{O,x
g
, y
g
, z
g
}.
Un solide 1, de masse m, est li R
g
par une liaison pivot d'axe (O,z
g
).
04-c05
!
!
x
"
g
y
"
g
x
"
1
y
"
1
z
"
g
G
O
Choisissons le repre R
1
{O,x
1
, y
1
, z
1
} li 1 tel que :
OG
= a x
1
= (x
g
,x
1
)
L'oprateur d'inertie du solide 1 dans le repre R
1
est :
J (O,1) =
\
|
[
)
j
A F E
F B D
E D C
R
1
Les actions mcaniques extrieures connues sur le solide 1, y compris les actions de pesanteur, sont :
T(e/1) =
O
|
|
X'x
1
+ Y'y
1
+ Z'z
1
L'x
1
+ M'y
1
+ N'z
1
Les actions mcaniques extrieures inconnues sur le solide 1 sont :
T(0/1) =
O
|
|
Xx
1
+ Yy
1
+ Zz
1
Lx
1
+ My
1
+ Nz
1
o N est nul si le pivot est parfait.
4.2.) Cinmatique
Le torseur cinmatique du mouvement du solide 1 par rapport ai bti 0 est :
V(1/0) =
O
|
z
1
0
La vitesse de G dans R
g
est donc :
V
(G,1/0) = a
y
1
Par drivation, l'acclration de G dans R
g
est :
(G,1/0) = a (
y
1
2
x
1
)
Page 23/30
4.3.) Cintique
Le point O tant fixe dans R
g
, on a :
(O,1/0) = J (O,S)
(1/0) =
(E x
1
D y
1
+ C z
1
)
puis :
(O,1/0) = |
|
|
|
d
(O,1/0)
dt
R
g
En effectuant la drivation, on obtient :
(O,1/0) =
(E x
1
D y
1
+ C z
1
) +
(1/0) ^
(E x
1
D y
1
+ C z
1
)
soit :
(O,1/0) = (E
+ D
2
) x
1
+ (D
2
) y
1
+ C
z
1
4.4.) Principe fondamental de la dynamique
En appliquant le PFD au solide 1, on a : T(0/1) + T(e/1) = D(1/0)
crivons cette galit en O, en projection sur R
1
:
m a
2
= X + X' m a
= Y + Y' 0 = Z + Z'
E
+ D
2
= L + L' D
2
= M + M' C
= N + N'
On a donc 7 inconnues : X, Y, Z, L, M, N et .
4.5.) Liaison parfaite
Dans ce cas N = 0. Il reste donc 6 quations et 6 inconnues :
m a
2
= X+ X' m a
= Y + Y' 0 = Z + Z'
E
+ D
2
= L + L' D
2
= M + M' C
= N'
On pourrait galement se fixer une quation de frottement liant N .
4.6.) Dfinition de l'quilibrage
Un solide S en rotation autour d'un axe fixe dans un repre, est dit quilibr si le torseur de liaison est
indpendant de la frquence de rotation.
Les conditions d'quilibrage sont satisfaites si :
a = 0 [5-35]
C'est l'quilibrage dit "statique", impliquant que G appartienne l'axe de rotation.
Mais il faut de plus un quilibrage "dynamique" :
D = 0 et E = 0 [5-36]
Page 24/30
4.7.) quilibrage par masses additionnelles
4.7.a) quilibrage une seule masse
On dsire placer une masse ponctuelle M
0
situe au point P
0
, fixe dans S, tel que l'ensemble M
0
+S soit quilibr.
Le point P
0
est donn par : OP
0
= x x
1
+ y y
1
+ z z
1
L'oprateur d'inertie de l'ensemble M + S est :
J (O,M
0
+S) =
\
|
|
[
)
j
j
A+M
0
(y
2
+z
2
) FM
0
x y EM
0
x z
FM
0
x y B+M
0
(x
2
+z
2
) DM
0
y z
EM
0
x z DM
0
y z C+M
0
(x
2
+y
2
)
R
En considrant M
0
+ S, les quations deviennent :
(m a M
0
x)
2
= X+ X' M
0
y
= Y + Y' 0 = Z + Z'
(E M
0
x z)
+ (D + M
0
y z)
2
= L + L' (D M
0
y z)
+ (E M
0
x z)
2
= M + M'
(C + M
0
(x
2
+y
2
))
= N'
Pour qu'elles soient indpendantes de
, il faut donc que :
M a + M
0
x = 0 M
0
y = 0 D + M
0
y z = 0 E + M
0
x z = 0
D'o immdiatement :
y = 0 D = 0 x = a
m
M
0
z =
E
m a
Ceci n'est donc possible que dans le cas particulier o D est nul.
4.7.b) quilibrage deux masses
On adjoint au solide S les masses M
1
en P
1
et M
2
en P
2
.
On pose :
OP
1
= x
1
x
1
+ y
1
y
1
+ z
1
z
1
OP
2
= x
2
x
1
+ y
2
y
1
+ z
2
z
1
Pour obtenir l'quilibrage global de l'ensemble S+M
1
+M
2
, il faut satisfaire les quations :
m a + M
1
x
1
+ M
2
x
2
= 0 M
1
y
1
+ M
2
y
2
= 0
D + M
1
y
1
z
1
+ M
2
y
2
z
2
=0 E + M
1
x
1
z
1
+ M
2
x
2
z
2
= 0
On obtient donc 4 quations 8 inconnues. Ce qui laisse la possibilit de fixer des conditions complmentaires.
4.7.c) Roue de vhicule
Il est plus facile de placer les masses additionnelles sur le diamtre extrieur de la jante. La distance z
1
z
2
doit
tre gale la largeur de la jante.
En appelant R le rayon extrieur de la jante, e sa largeur,
1
et
2
les angles de mise en place, on obtient :
x
1
= R cos
1
y
1
= R sin
1
z
1
= 0
x
2
= R cos
2
y
2
= R sin
2
z
2
= e
En remplaant dans les quations prcdentes, il vient :
ma + M
1
R cos
1
+ M
2
R cos
2
= 0 M
1
R sin
1
+ M
2
R sin
2
= 0
D + M
2
R e sin
2
=0 E + M
2
R e cos
2
= 0
Ces quatre quations ont pour inconnues : M
1
,
1
, M
2
et
2
.
Elles se rsolvent en :
tan
2
=
D
E
tan
1
=
D
E m a e
M
2
=
D
2
+ E
2
e R
M
1
=
D
2
+ (E m a e)
2
e R
Page 25/30
5.) MOTEURS
5.1.) Dfinition
Un moteur peut fournir de l'nergie mcanique partir d'un autre type d'nergie.
On sait principalement raliser des moteurs lectriques, thermiques, hydrauliques et pneumatiques.
5.2.) Mouvements
On trouve principalement deux types de moteurs :
mouvement circulaire
mouvement linaire.
5.3.) Accouplements
On considre que les moteurs sont lis aux systmes mcaniques tudis par des accouplements qui
n'introduisent pas d'efforts parasites.
Les actions mcaniques des moteurs sur les pices entranes sont alors du type :
T(M/1) =
||
|
|
0
L x
T(M/1) =
O
||
|
|
X x
0
Il ne faut pas penser que les quantits caractrisant les actions mcaniques sont des constantes.
Par contre on peut calculer un couple moyen ou un effort moyen.
5.4.) Schmas
0
x
!
y
!
05-c06
M
1
0
x
!
y
!
M
1
Il faut faire trs attention la pice laquelle est lie le bti du moteur. Lorsque que c'est le bti gnral, on ne
figure pas toujours explicitement la liaison pour faciliter la lecture des schmas.
6.) MTHODE GNRALE D'TUDE DES SYSTMES DE SOLIDES
On se reportera avec profit la cinmatique et la statique.
6.1.) Schma de principe
Il convient tout d'abord de transformer l'ensemble considr en un schma de principe, plus directement
utilisable.
partir de l'ensemble rel ou d'un plan, la mthode gnrale consiste regrouper d'abord les pices mcaniques
qui font l'objet de liaisons mobilit zro (liaison complte). Les sous-ensembles ainsi obtenus peuvent tre
diffrencis par des hachures ou des couleurs diffrentes.
On examine les surfaces de contact en enlevant les lments intermdiaires tels que les roulements. On dfinit
ensuite les liaisons entre ces solides pris deux deux, en dterminant les mouvements relatifs possibles. La
reprsentation obtenue est quelquefois appele "Schma minimal global". Mais pour une meilleure
comprhension du mcanisme, ce schma peut tre simplifi, indpendamment de toutes notions de dimensions,
en ne tenant compte que des fonctions globales des liaisons.
C'est le schma de principe du mcanisme, plan ou spatial, qui est l'outil privilgi de la rflexion. Cette tape de
modlisation est trs dlicate raliser.
Deux mcanismes ayant le mme schma de principe devraient remplir la mme fonction. En dehors de toutes
autres considrations, ils sont quivalents du point de vue du fonctionnement.
On peut ainsi dfinir des classes d'quivalence de mcanismes ayant mme fonction.
Page 26/30
6.2.) Numroter les solides
Il faut ensuite numroter le plus clairement possible tous les solides, en attribuant conventionnellement le
numro 0 au bti ou au solide de rfrence.
Gnralement il n'y a pas de correspondance entre les repres de la nomenclature et ceux affects aux sous-
ensembles du schma de principe.
6.3.) tablir les repres et paramtrer
On attribue chaque solide un repre de rfrence, en vertu de l'quivalence solide-repre. Ce repre doit tenir
compte des points particuliers du solide. Les orientations des vecteurs unitaires doivent tre dtermines avec
soin.
Les repres doivent ensuite tre mis en position, de manire unique, les uns par rapport aux autres.
On installe ainsi un paramtrage de longueurs et d'angles, qui doit rendre compte de faon biunivoque de la
configuration du mcanisme.
O
y
!
x
!
x
!
y
!
"
"
1
1
02-c11
0
0
Il est ncessaire d'tablir, ce stade, des schmas de passage d'un
repre l'autre. Ces schmas feront apparatre les angles petits
(infrieurs 30) et positifs. De cette faon, on ne peut se tromper
sur les signes. De plus, le cosinus est plus grand que le sinus.
Le vecteur perpendiculaire au plan est obligatoirement dirig
vers l'avant pour viter des confusions dans le signe des produits
vectoriels.
Il convient de bien distinguer dans les paramtres, ceux qui dpendent du temps, si possible dsigns par des
lettres grecques et ceux qui fixent les dimensions ou les rglages d'un mcanisme, si possible dsigns par des
lettres latines.
6.4.) Caractriser les liaisons
6.4.a) Cinmatique
tablir pour chaque liaison le torseur cinmatique associ, relativement au paramtrage effectu. Ce torseur doit
tre exprim en un point o sa forme est la plus simple. Si l'on ne peut dterminer directement les projections
nulles, on a recours aux conditions vectorielles, qui doivent tre exprimes avec les paramtres du problme.
6.4.b) Actions mcaniques
On dtermine pour chaque liaison les particularits du torseur associ aux actions mcaniques. Il est souhaitable
que le point choisi soit le mme que celui utilis en cinmatique. On tablit alors les projections positives des
actions inconnues sur les repres de rfrences. Sur les schmas, ces efforts inconnus doivent tre reprsents
positifs.
Deux mthodes sont possibles :
Projeter sur le repre li au bti et crire les quations de liaison.
Projeter directement sur un repre li l'un des solides de la liaison en tenant compte directement des
particularits.
Pour les liaisons parfaites, il faut vrifier ce niveau, en faisant le comoment du torseur cinmatique et du
torseur d'action mcanique, que la puissance est bien nulle.
6.4.c) Liaison avec frottement
On obtient toujours une quation et une inquation. On note f le coefficient de frottement.
Sans glissement
Il existe des points de vitesse nulle et l'action tangentielle est limite : V
(I,2/1) = 0 || T
12
|| < f |N
12
|
Avec glissement
Il n'existe pas de point de vitesse nulle, mais l'action tangentielle est connue :
V
(I,2/1) 0 T
12
V
(I,2/1) < 0 T
12
^ V
(I,2/1) = 0 || T
12
|| = f |N
12
|
Page 27/30
6.4.d) Problme plan
Le problme est dit plan si, pour tout solide i et tout solide j, on a :
V(j/i) =
A
|
|
r z
u x
+ v y
T(i/j) =
A
|
|
Xx
+ Y y
N z
D(i/0) =
A
|
|
Gx
+ H y
F z
6.5.) Cinmatique
On dtermine les boucles cinmatiques, relativement au paramtrage effectu. Chaque boucle permet d'crire
une quation torsorielle du type :
V(a/b) + + V(d/e) + V(e/a) = 0
Elle donne au maximum six quations scalaires.
En appelant b le nombre de boucles indpendantes du systme, on a 6 b quations scalaires pour un problme
spatial et 3 b quations scalaires pour un problme plan.
Pour le calcul effectif, il faut choisir les points les plus simples, en gnral les "centres" des liaisons et tenir
compte des quations complmentaires. Des produits scalaires convenables permettent souvent d'liminer les
inconnues indsirables et d'obtenir directement les relations cherches.
Dans la majorit des cas, les quations trouves sont intgrables (sans oublier la constante). On peut alors
souvent trouver une interprtation gomtrique, qui apparat comme lumineuse une fois le problme rsolu.
Ces intgrations constituent une bonne vrification.
6.6.) Application du PFD
Pour appliquer le PFD, il faut dfinir trs prcisment le solide ou l'ensemble de solides que l'on considre. Pour
un ensemble constitu d'un bti et de n solides, on ne peut crire que n quations torsorielles indpendantes.
Toute quation supplmentaire est ncessairement linairement dpendante des prcdentes.
Il n'est pas utile de considrer le bti, car on ferait apparatre les actions de l'extrieur sur celui-ci, actions qui ne
sont en gnral pas recherches.
6.7.) Rsolution
Le plus souvent, il faut commencer par considrer les solides "sans masse", ce qui permet d'appliquer le PFS.
Dans le cas gnral, il faut utiliser les composantes nulles des torseurs d'actions mcaniques.
6.7.a) Sans glissement ou sans frottement
Le premier objectif est de trouver les quations de mouvement en liminant les actions mcaniques inconnues.
La connaissance des mouvements permet ensuite de dterminer les actions mcaniques.
6.7.b) Avec glissement et frottement
Il faut d'abord dterminer les actions "normales". On obtient ensuite les actions "tangentielles" l'aide des lois de
COULOMB. Le mouvement se dtermine enfin, en liminant les efforts.
6.7.c) Remarques
Le thorme de la puissance est trs utile pour des mouvements dpendant d'un seul paramtre. Il peut galement
donner des intgrales premires.
C'est, en toute fin de rsolution, si l'on ne peut pas faire autrement, que l'on calcule les composantes
ncessaires des torseurs dynamiques.
Page 28/30
6.8.) Tableau rcapitulatif des liaisons normalises
Page 29/30
S-ar putea să vă placă și
- Reviser Son Bac Avec Le Monde PHYSIQUE-CHIMIE PDFDocument114 paginiReviser Son Bac Avec Le Monde PHYSIQUE-CHIMIE PDFsebastien_houee100% (4)
- Bilan Thermique de Construction - Etude D Un Cas Et Présentation de SolutionsDocument185 paginiBilan Thermique de Construction - Etude D Un Cas Et Présentation de SolutionsImad100% (1)
- Cours RobotiqueDocument85 paginiCours RobotiqueHassan Hallaoua43% (7)
- B-13-1 - PE0101 - Note de Calcul Mécanique Convoyeur CL7' - MEC31301 - 00 - 20151101Document28 paginiB-13-1 - PE0101 - Note de Calcul Mécanique Convoyeur CL7' - MEC31301 - 00 - 20151101Akram FerchichiÎncă nu există evaluări
- Exercices ElectrostatiqueDocument13 paginiExercices ElectrostatiqueChehhat AbdelmadjidÎncă nu există evaluări
- EmbfreinDocument7 paginiEmbfreinHassan HallaouaÎncă nu există evaluări
- Epi CycloDocument4 paginiEpi CycloHassan HallaouaÎncă nu există evaluări
- INP Meca TDDocument41 paginiINP Meca TDHassan HallaouaÎncă nu există evaluări
- Cinematique en Coordonnees CartesiennesDocument11 paginiCinematique en Coordonnees CartesiennesHassan HallaouaÎncă nu există evaluări
- Capteurs InductifsDocument2 paginiCapteurs InductifsHassan HallaouaÎncă nu există evaluări
- Cours Transmission de Mouvements-2Document14 paginiCours Transmission de Mouvements-2Hassan HallaouaÎncă nu există evaluări
- Solution de TD 1 2 3 Electrotechnique FondamentaleDocument33 paginiSolution de TD 1 2 3 Electrotechnique FondamentaleDaRk SoUlÎncă nu există evaluări
- Serie 8 LC LibreDocument5 paginiSerie 8 LC LibrehamziÎncă nu există evaluări
- SOUTENANCEDocument22 paginiSOUTENANCEErnest Bakouta100% (1)
- 0mecanique Corrige Chap6Document14 pagini0mecanique Corrige Chap6mercurycurryÎncă nu există evaluări
- 2007 Reunion Exo2 Sujet Meca Trebuchet 5 5ptsDocument3 pagini2007 Reunion Exo2 Sujet Meca Trebuchet 5 5ptsالغزيزال الحسن EL GHZIZAL Hassane100% (1)
- 5chap V Equilibre RelatifDocument2 pagini5chap V Equilibre RelatifHamzaGdÎncă nu există evaluări
- Tarifs Basse TensionDocument1 paginăTarifs Basse Tensionkeusra germain zrakpaÎncă nu există evaluări
- Cours Thermodynamique P222 BCG S2Document109 paginiCours Thermodynamique P222 BCG S2ïLÿãsÎncă nu există evaluări
- Ilovepdf Merged-2Document114 paginiIlovepdf Merged-2Hiba ElbhiouiÎncă nu există evaluări
- Determination D Une Quantite de Matiere - Evaluation Experimentale - 2ndeISIDocument10 paginiDetermination D Une Quantite de Matiere - Evaluation Experimentale - 2ndeISIJimingot jamsÎncă nu există evaluări
- MX24 5-LanguageDocument74 paginiMX24 5-LanguagedesbierresÎncă nu există evaluări
- Série D'exercices N°1 - Sciences Physiques Champ Électrique - L'oxydoréduction - 3ème Sciences Exp (2011-2012) MR Adam BoualiDocument2 paginiSérie D'exercices N°1 - Sciences Physiques Champ Électrique - L'oxydoréduction - 3ème Sciences Exp (2011-2012) MR Adam BoualiSou Yakoub100% (2)
- Rapport Final Fatma EzzineDocument112 paginiRapport Final Fatma Ezzineoussema jendoubiÎncă nu există evaluări
- Tpe TmiDocument5 paginiTpe TmiChourouk MeskiniÎncă nu există evaluări
- CourDocument110 paginiCourFATINE BOUKEBBOUÎncă nu există evaluări
- Caractéristique D'un Dipôle Actif Web ModifiéDocument11 paginiCaractéristique D'un Dipôle Actif Web ModifiéRihab ARBANEÎncă nu există evaluări
- Procédure:: Justification Des ChoixDocument5 paginiProcédure:: Justification Des ChoixAHMED LEBBARÎncă nu există evaluări
- Amortisseur Fydraulique Et PneumatiqueDocument10 paginiAmortisseur Fydraulique Et PneumatiqueDieudonné NofodjiÎncă nu există evaluări
- Fasicule TP - SMP-S5 - Mec. Analytq Et Vib (2023-2024) - PR A. REZZOUKDocument40 paginiFasicule TP - SMP-S5 - Mec. Analytq Et Vib (2023-2024) - PR A. REZZOUKSamahi Fatima ZahraÎncă nu există evaluări
- Chapitre 4 Protection Des PersonnesDocument6 paginiChapitre 4 Protection Des Personnesعبد الله إبن عباسÎncă nu există evaluări
- ThermodynamiqueDocument22 paginiThermodynamiquefast2feriousÎncă nu există evaluări
- QCM Sur Les ComplexesDocument9 paginiQCM Sur Les ComplexesFranck Olivier TuoÎncă nu există evaluări
- MP PHYSIQUE MINES 2 2007.enonceDocument6 paginiMP PHYSIQUE MINES 2 2007.enonceAnass TakfaÎncă nu există evaluări
- La Puissance ElectriqueDocument2 paginiLa Puissance Electriquesmail elabidiÎncă nu există evaluări
- Série N°1 E2 Magnétotatique 2020-2021 SMP-S3 A. SALIDocument3 paginiSérie N°1 E2 Magnétotatique 2020-2021 SMP-S3 A. SALIhero jassim100% (1)
- Corrige td2Document10 paginiCorrige td2DjamelBenlakehalÎncă nu există evaluări