S-ar putea să vă placă și
- FPGA ArchitectureDocument39 paginiFPGA ArchitectureeeshgargÎncă nu există evaluări
- Maths Probability Random Vectors, Joint Distributions Lec5/8 PDFDocument8 paginiMaths Probability Random Vectors, Joint Distributions Lec5/8 PDFeeshgargÎncă nu există evaluări
- CADENCE Analog & Mixed Signal Labs PDFDocument95 paginiCADENCE Analog & Mixed Signal Labs PDFeeshgarg86% (7)
- Fpga & It's ArchitectureDocument39 paginiFpga & It's Architectureeeshgarg100% (6)
- Maths Probability Expectation and Conditional Expectation Lec6/8 PDFDocument12 paginiMaths Probability Expectation and Conditional Expectation Lec6/8 PDFeeshgargÎncă nu există evaluări
- Maths Probability Random Variables Lec2/8 PDFDocument6 paginiMaths Probability Random Variables Lec2/8 PDFeeshgargÎncă nu există evaluări
- Maths Probability Characteristic Functions Lec7/8 PDFDocument4 paginiMaths Probability Characteristic Functions Lec7/8 PDFeeshgargÎncă nu există evaluări
- Maths Conditional Probability and Independence Lec3/8 PDFDocument11 paginiMaths Conditional Probability and Independence Lec3/8 PDFeeshgargÎncă nu există evaluări
- Lecture Notes On Probability TheoryDocument6 paginiLecture Notes On Probability Theoryshere0002923Încă nu există evaluări
- NIT Jalandhar M Tech Regulations-2012 PDFDocument13 paginiNIT Jalandhar M Tech Regulations-2012 PDFeeshgargÎncă nu există evaluări
- Maths Probability Distributions Lec4/8 PDFDocument8 paginiMaths Probability Distributions Lec4/8 PDFeeshgargÎncă nu există evaluări
- Maths Probability Lec1/8 PDFDocument9 paginiMaths Probability Lec1/8 PDFeeshgargÎncă nu există evaluări
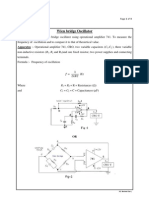
- Operational Amplifier 741 As Wein Bridge Oscillator 1Document4 paginiOperational Amplifier 741 As Wein Bridge Oscillator 1Deepak SharmaÎncă nu există evaluări
- Terms Related To VLSIDocument1 paginăTerms Related To VLSIeeshgargÎncă nu există evaluări
- Cadence SOC EncounterDocument222 paginiCadence SOC Encountereeshgarg0% (1)
- Static Timing Analysis in VLSI CircuitsDocument16 paginiStatic Timing Analysis in VLSI CircuitseeshgargÎncă nu există evaluări
- Unix Tutorial PDFDocument3 paginiUnix Tutorial PDFeeshgargÎncă nu există evaluări
- Smith ChartDocument1 paginăSmith CharteeshgargÎncă nu există evaluări
- Antenna EffectDocument5 paginiAntenna Effecteeshgarg100% (1)
- A Memetic Algorithm (Genetic Algorithm) For VLSI FloorplanningDocument40 paginiA Memetic Algorithm (Genetic Algorithm) For VLSI FloorplanningeeshgargÎncă nu există evaluări
- The 8051 Microcontroller and Embedded Systems Second Edition Muhammad Ali Mazidi Janice Gillispie Mazidi Rolin D. McKinlayDocument105 paginiThe 8051 Microcontroller and Embedded Systems Second Edition Muhammad Ali Mazidi Janice Gillispie Mazidi Rolin D. McKinlayprax_1259% (27)
- Basic Semiconductor PhysicsDocument311 paginiBasic Semiconductor PhysicseeshgargÎncă nu există evaluări
- Delhi Metro Route MapDocument1 paginăDelhi Metro Route Mapnakulyadav7Încă nu există evaluări
- List of Bank Holidays IndiaDocument1 paginăList of Bank Holidays IndiaeeshgargÎncă nu există evaluări
- RPSC Objection FormDocument1 paginăRPSC Objection FormeeshgargÎncă nu există evaluări
- BEL Placement Sample Paper 5Document16 paginiBEL Placement Sample Paper 5XXXÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Caterpillar EMCP 4.1 Spec SheetDocument2 paginiCaterpillar EMCP 4.1 Spec Sheetnhocti007Încă nu există evaluări
- Best Solar Panel Company in PakistanDocument4 paginiBest Solar Panel Company in Pakistansunlife solarÎncă nu există evaluări
- An Approach To Audio Amplifier Design - J. R. Stuart (Wireless World, Aug-Oct 1973)Document17 paginiAn Approach To Audio Amplifier Design - J. R. Stuart (Wireless World, Aug-Oct 1973)jimmy67musicÎncă nu există evaluări
- The Specifications of 151821-2010: Details PDFDocument1 paginăThe Specifications of 151821-2010: Details PDFSaul UribeÎncă nu există evaluări
- Title Rain Detector Alarm SystemDocument2 paginiTitle Rain Detector Alarm SystemMarhmello PadriqueÎncă nu există evaluări
- SCF182 Simplifying Small Cell InstallationDocument22 paginiSCF182 Simplifying Small Cell InstallationGabrielÎncă nu există evaluări
- 880KW Power GeneratorDocument5 pagini880KW Power GeneratorA Wahid KemalÎncă nu există evaluări
- Agila Satellite InfoDocument1 paginăAgila Satellite Infotrish_libangÎncă nu există evaluări
- China Rise On AIDocument54 paginiChina Rise On AIalekkos alexandroupolusÎncă nu există evaluări
- File Handover Note/ Technical Evaluation SheetDocument2 paginiFile Handover Note/ Technical Evaluation SheetJigyesh SharmaÎncă nu există evaluări
- Final Year Project Center CoimbatoreDocument15 paginiFinal Year Project Center Coimbatorecoimbatore projectÎncă nu există evaluări
- Kavita Shukla CRM PROJECTDocument30 paginiKavita Shukla CRM PROJECTYogendra Pratap SinghÎncă nu există evaluări
- Dataport Dp10: Quick Start GuideDocument4 paginiDataport Dp10: Quick Start GuideKarim MessoussiÎncă nu există evaluări
- Project Management Process Mapping OverviewDocument1 paginăProject Management Process Mapping Overviewprerna93Încă nu există evaluări
- 3G SSV Drive Test Methodology & KPIsDocument31 pagini3G SSV Drive Test Methodology & KPIsSyed Adil AliÎncă nu există evaluări
- 2004Document10 pagini2004abcdbrowniÎncă nu există evaluări
- MTA 98-368 Mobile Fundamentals - Study GuideDocument89 paginiMTA 98-368 Mobile Fundamentals - Study GuideTom100% (1)
- EElectives SubjectsDocument60 paginiEElectives SubjectsDr. Vivek SrivastavaÎncă nu există evaluări
- Upgrade Your $3 Bluetooth Module To Have HID Firmware - 11 Steps (With Pictures)Document10 paginiUpgrade Your $3 Bluetooth Module To Have HID Firmware - 11 Steps (With Pictures)husa flaviuÎncă nu există evaluări
- NN Tool ExampleDocument3 paginiNN Tool ExamplecOrekernÎncă nu există evaluări
- Rubina ResumeDocument1 paginăRubina ResumeDisha ModÎncă nu există evaluări
- LR Seasafe SoftwareDocument9 paginiLR Seasafe SoftwaredsrfgÎncă nu există evaluări
- Onduleur OFF-GRID GrowattDocument2 paginiOnduleur OFF-GRID GrowattSates EnergyÎncă nu există evaluări
- E-AWB Handling Manual For SAA Cargo Freight ForwardersDocument16 paginiE-AWB Handling Manual For SAA Cargo Freight ForwardersFiona SalvageÎncă nu există evaluări
- Online Bus Ticket Reservation System streamlines bookingDocument18 paginiOnline Bus Ticket Reservation System streamlines bookingmuhdÎncă nu există evaluări
- Filtering and Sorting Data Using Functions For Data AnalysisDocument1 paginăFiltering and Sorting Data Using Functions For Data AnalysisSarang PotdarÎncă nu există evaluări
- Tronic IAN 79010 Battery ChargerDocument63 paginiTronic IAN 79010 Battery ChargerpaspargiliusÎncă nu există evaluări
- RVAC EN 2016-10 150dpiDocument20 paginiRVAC EN 2016-10 150dpiAlejandro MolinaÎncă nu există evaluări
- New Microsoft PowerPoint PresentationDocument13 paginiNew Microsoft PowerPoint PresentationDon Poul JoseÎncă nu există evaluări
- Service Manual: MT1192 19" Color TelevisionDocument54 paginiService Manual: MT1192 19" Color TelevisionHamilton MoranÎncă nu există evaluări