S-ar putea să vă placă și
- Pompe A Pistons Axiaux PDFDocument8 paginiPompe A Pistons Axiaux PDFNadia DridiÎncă nu există evaluări
- C 04-02 PDFDocument8 paginiC 04-02 PDFkharrat samirÎncă nu există evaluări
- Corrige D Examen MNT PRV 4fDocument3 paginiCorrige D Examen MNT PRV 4fNasserÎncă nu există evaluări
- m14 Sensibilisation A La Qualite Ge EsaDocument75 paginim14 Sensibilisation A La Qualite Ge EsaNadia DridiÎncă nu există evaluări
- Démontage Remontage - Maintenance Moteur PDFDocument5 paginiDémontage Remontage - Maintenance Moteur PDFMayor Nfmn100% (2)
- Chapitre.3 Partie.1Document38 paginiChapitre.3 Partie.1Nadia DridiÎncă nu există evaluări
- Calcul Des Boulons Au CisaillementDocument2 paginiCalcul Des Boulons Au CisaillementNadia DridiÎncă nu există evaluări
- Pompe A Pistons Axiaux PDFDocument8 paginiPompe A Pistons Axiaux PDFNadia DridiÎncă nu există evaluări
- Designation Materiaux v4Document6 paginiDesignation Materiaux v4Hatem LaajiliÎncă nu există evaluări
- Tap PDFDocument248 paginiTap PDFNadia DridiÎncă nu există evaluări
- Position Protection Animale ChasseDocument9 paginiPosition Protection Animale ChasseNadia DridiÎncă nu există evaluări
- Metrologie de BaseDocument8 paginiMetrologie de BaseA. samir86% (7)
- Caracteristiques Des HuilesDocument9 paginiCaracteristiques Des Huilessl1962100% (1)
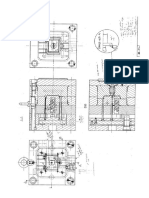
- Plan de MouleDocument1 paginăPlan de MouleNadia DridiÎncă nu există evaluări
- Examen 2013Document4 paginiExamen 2013Brahim MouhcineÎncă nu există evaluări
- EffetgyroscopiqueDocument22 paginiEffetgyroscopiqueNadia DridiÎncă nu există evaluări
- Sujet 1 PDFDocument10 paginiSujet 1 PDFLarbi ElbakkaliÎncă nu există evaluări
- Accoudoirv 5Document46 paginiAccoudoirv 5Nadia DridiÎncă nu există evaluări
- Automobile 1 V 2Document41 paginiAutomobile 1 V 2Nadia DridiÎncă nu există evaluări
- Moule D'injectionDocument3 paginiMoule D'injectionNadia DridiÎncă nu există evaluări
- Empreintesv 6Document17 paginiEmpreintesv 6amrÎncă nu există evaluări
- Carte de L'europe À ImprimerDocument1 paginăCarte de L'europe À ImprimerNadia DridiÎncă nu există evaluări
- Vocabulaire Moule DinjectionDocument1 paginăVocabulaire Moule DinjectionMouradBenSedrineÎncă nu există evaluări
- Operations Geometriques 2DDocument12 paginiOperations Geometriques 2DNadia DridiÎncă nu există evaluări
- Implementation D Un Modele de ComportemeDocument3 paginiImplementation D Un Modele de ComportemeNadia DridiÎncă nu există evaluări
- Vocabulaire Moule DinjectionDocument1 paginăVocabulaire Moule DinjectionMouradBenSedrineÎncă nu există evaluări
- Torsion Act (Banc D'essai)Document4 paginiTorsion Act (Banc D'essai)Nadia DridiÎncă nu există evaluări
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 paginiCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiÎncă nu există evaluări
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 paginiCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiÎncă nu există evaluări
- 2023 TP3 SQL BofDocument3 pagini2023 TP3 SQL Bofsidik abouabakarÎncă nu există evaluări
- NhbjugytvDocument2 paginiNhbjugytvmnawarÎncă nu există evaluări
- TKZdoc FCTDocument88 paginiTKZdoc FCTRuben FinchÎncă nu există evaluări
- SemaphoreDocument4 paginiSemaphoreNihed AttiaÎncă nu există evaluări
- Les Tableaux Et Les Chaînes de CaractèresDocument5 paginiLes Tableaux Et Les Chaînes de CaractèresMariem AjroudÎncă nu există evaluări
- KNDLDocument14 paginiKNDLEL MEHDI TOUNSIÎncă nu există evaluări
- Rapport Fixation Du Prix en B To B VFDocument35 paginiRapport Fixation Du Prix en B To B VFKarim ChakaraÎncă nu există evaluări
- Les Moyens de Ry GlementDocument20 paginiLes Moyens de Ry Glementnabihabn18Încă nu există evaluări
- Belgische Kamer Van Volksvertegenwoordigers Chambre Des Représentants de BelgiqueDocument275 paginiBelgische Kamer Van Volksvertegenwoordigers Chambre Des Représentants de BelgiqueDe Staerke PhilippeÎncă nu există evaluări
- TD Bilan FinancierDocument2 paginiTD Bilan FinancierOthmane AD100% (1)
- Monographie TchaourouDocument45 paginiMonographie TchaourouowensÎncă nu există evaluări
- Granulats FRDocument21 paginiGranulats FRMourad IkedjiÎncă nu există evaluări
- Gestion BudgétaireDocument1 paginăGestion Budgétairerenesephora9Încă nu există evaluări
- Comment Convertir Un Fichier Word en PDF Avec Adobe ReaderDocument2 paginiComment Convertir Un Fichier Word en PDF Avec Adobe ReaderGeorgeÎncă nu există evaluări
- SUPPORT DE COURS Introduction Au Calcul ScientifiqueDocument52 paginiSUPPORT DE COURS Introduction Au Calcul ScientifiqueBrice KouamÎncă nu există evaluări
- Alougoum-Boutonnière de Bou Azzer PDFDocument100 paginiAlougoum-Boutonnière de Bou Azzer PDFNajidYasser100% (1)
- Projet Décret Résiliation SantéDocument6 paginiProjet Décret Résiliation SantéSébastien Acedo50% (2)
- Calcul Des Courroies Synchrones TEXROPE FR PDFDocument64 paginiCalcul Des Courroies Synchrones TEXROPE FR PDFNawres MsekniÎncă nu există evaluări
- Fiche 3 - Quelles Sont Les Sources de La Croissance Économique - La ProductivitéDocument3 paginiFiche 3 - Quelles Sont Les Sources de La Croissance Économique - La ProductivitéMme et Mr Lafon100% (2)
- Analyse Fonctionnelle Diagramme Pieuvre EtudiantsDocument9 paginiAnalyse Fonctionnelle Diagramme Pieuvre Etudiantsruben meye meye N'koumeÎncă nu există evaluări
- Ravitailleur de Bitume ADR: OkurmakinaDocument12 paginiRavitailleur de Bitume ADR: Okurmakinamatthew Fa7Încă nu există evaluări
- Le Système Fiscal Suisse - 2009Document91 paginiLe Système Fiscal Suisse - 2009Vincent ISOZÎncă nu există evaluări
- Conseils Pour La Gestion D'un Serveur - IONOSDocument11 paginiConseils Pour La Gestion D'un Serveur - IONOSBrali DIOULSON NGUEMAÎncă nu există evaluări
- Stabilisation D'un Drone Quadrirotor: Tipe 2021: Enjeux SociétauxDocument33 paginiStabilisation D'un Drone Quadrirotor: Tipe 2021: Enjeux SociétauxMohamed AssissÎncă nu există evaluări
- 2eme Courrier Officiel D'information Sur La Fin Des Tarifs Réglementés Du Gaz Et Liste Des FournisseursDocument7 pagini2eme Courrier Officiel D'information Sur La Fin Des Tarifs Réglementés Du Gaz Et Liste Des FournisseursInformation sur les Tarifs réglementés (TRV) de l'électricité et du gazÎncă nu există evaluări
- CBS Manuel FR 2010Document186 paginiCBS Manuel FR 2010Mohamed Bensaid100% (3)
- Cahier Des ChargesDocument19 paginiCahier Des ChargespayneeeÎncă nu există evaluări
- Séminaire 2Document31 paginiSéminaire 2OMEIMA BEN ZEBIRÎncă nu există evaluări
- Micro HF Cravate Sennheisen Ewdm2Document2 paginiMicro HF Cravate Sennheisen Ewdm2Said GedeonÎncă nu există evaluări