S-ar putea să vă placă și
- Implementation of Port State Measures: Legislative Template Framework for Procedures Role of Regional Fisheries Management OrganizationsDe la EverandImplementation of Port State Measures: Legislative Template Framework for Procedures Role of Regional Fisheries Management OrganizationsÎncă nu există evaluări
- Guidelines MultibeamDocument9 paginiGuidelines MultibeamDiego D. MantillaÎncă nu există evaluări
- Kuliah 1-HIDROGRAFIDocument61 paginiKuliah 1-HIDROGRAFIaizatÎncă nu există evaluări
- PHINS Guideline - Rev A3Document63 paginiPHINS Guideline - Rev A3Marzuki ChemenorÎncă nu există evaluări
- EIVA SpecificationDocument68 paginiEIVA SpecificationCharles100% (1)
- SICAMS - Metrology SubseaDocument17 paginiSICAMS - Metrology SubseaSkee76Încă nu există evaluări
- Presentatie Fugro SurveyDocument31 paginiPresentatie Fugro SurveyClement ChimaÎncă nu există evaluări
- Noaa 20729 DS1Document70 paginiNoaa 20729 DS1Dodo BabyÎncă nu există evaluări
- Adcs Adcs0114Document102 paginiAdcs Adcs0114andresqbulÎncă nu există evaluări
- Q034-May-18 ASI Timas Survey ServicesDocument19 paginiQ034-May-18 ASI Timas Survey ServicesAulia AkbarÎncă nu există evaluări
- Single Beam Survey Using Eiva SoftwareDocument7 paginiSingle Beam Survey Using Eiva SoftwareArseni Maxim100% (2)
- SES2000 Medium Operator's Quick Start Manual - InnomarDocument20 paginiSES2000 Medium Operator's Quick Start Manual - InnomarhenryÎncă nu există evaluări
- USBL Cal ManualDocument40 paginiUSBL Cal ManualTuan OsmanÎncă nu există evaluări
- S-44 5eDocument36 paginiS-44 5emangaceng100% (1)
- SonarWiz RelNotes V6!05!0015Document33 paginiSonarWiz RelNotes V6!05!0015mizonexÎncă nu există evaluări
- The Calibration of Shallow Water MBESDocument200 paginiThe Calibration of Shallow Water MBESfawzarÎncă nu există evaluări
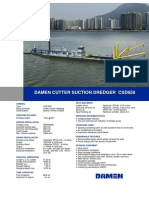
- Damen Cutter Suction Dredger 650Document2 paginiDamen Cutter Suction Dredger 650Fajrin M. NatsirÎncă nu există evaluări
- BOP Acoustic SystemDocument4 paginiBOP Acoustic Systemdondo1004Încă nu există evaluări
- G - ST - TSH - 017B - GapsDocument29 paginiG - ST - TSH - 017B - GapssrvshdrrÎncă nu există evaluări
- AF05-TECH.02 R00 - RANA AF05 Modular Saturation Diving System - Technical Data SheetDocument24 paginiAF05-TECH.02 R00 - RANA AF05 Modular Saturation Diving System - Technical Data SheetfrdsimÎncă nu există evaluări
- 12 - Helmsmans DisplayyyDocument96 pagini12 - Helmsmans Displayyyflawlessy2kÎncă nu există evaluări
- Chapter One 1.0 Background of The StudyDocument11 paginiChapter One 1.0 Background of The StudyAyoola OlamideÎncă nu există evaluări
- Multibeam SurveyingDocument1 paginăMultibeam Surveyingminik19Încă nu există evaluări
- Stockless Anchor DimensionsDocument0 paginiStockless Anchor DimensionsAdriel NardoÎncă nu există evaluări
- 2D Seismic TutorialDocument264 pagini2D Seismic Tutorialjose razoÎncă nu există evaluări
- Overview Sub-Bottom Imager - PanGeo SubseaDocument3 paginiOverview Sub-Bottom Imager - PanGeo SubseaWidya widyaÎncă nu există evaluări
- MethodologyDocument6 paginiMethodologySridhar DantuluriÎncă nu există evaluări
- CT Dredging Soil Lecture1a 2012Document13 paginiCT Dredging Soil Lecture1a 2012rme11maÎncă nu există evaluări
- The Principle of Side Scan Sonar and Its Application in The Detection of Suspended Submarine Pipeline TreatmentDocument6 paginiThe Principle of Side Scan Sonar and Its Application in The Detection of Suspended Submarine Pipeline TreatmentAlfian RomadhoniÎncă nu există evaluări
- Teledyne PDS User ManualDocument871 paginiTeledyne PDS User ManualStoyan GeorgievÎncă nu există evaluări
- QINSy Quickstart+V+8.0+UK+20060329+ PDFDocument142 paginiQINSy Quickstart+V+8.0+UK+20060329+ PDFAzis SolehÎncă nu există evaluări
- EIVA Navisuite - Navigation SystemDocument110 paginiEIVA Navisuite - Navigation SystemRaden Tuna100% (3)
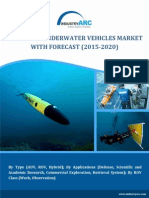
- Unmanned Underwater Vehicles MarketDocument18 paginiUnmanned Underwater Vehicles MarketAutomotiveIARCÎncă nu există evaluări
- Quick Start Guide Mu Phinsiii 001 BDocument33 paginiQuick Start Guide Mu Phinsiii 001 BMoorthy PakisamyÎncă nu există evaluări
- UM-8300-099 A3 User Manual For 6G Terminal LiteDocument50 paginiUM-8300-099 A3 User Manual For 6G Terminal Litesconquest ETOÎncă nu există evaluări
- CV Example Format 2018Document8 paginiCV Example Format 2018St3fandragos4306Încă nu există evaluări
- LNG Status DWG Tracking ListDocument11 paginiLNG Status DWG Tracking ListnicoÎncă nu există evaluări
- Seaeye Cougar XTDocument6 paginiSeaeye Cougar XTcacalot93Încă nu există evaluări
- Sonardyne 8070 71 Wideband PDFDocument2 paginiSonardyne 8070 71 Wideband PDFArnoldo López MéndezÎncă nu există evaluări
- Thomas Lamb - A Ship Design ProcedureDocument12 paginiThomas Lamb - A Ship Design Procedurenf_azevedo100% (1)
- Rov Pilot: My Story - Case Study of An ..Document2 paginiRov Pilot: My Story - Case Study of An ..Andrea G. MorenoÎncă nu există evaluări
- GNSS Signal StructuresDocument45 paginiGNSS Signal StructuresVasikaran PrabaharanÎncă nu există evaluări
- UMaine ROV Final ReportDocument20 paginiUMaine ROV Final Reportanon_203479050Încă nu există evaluări
- SeaPerch ROV Construction Manual - Standard Assembly - Version 2010-02 - DS013011Document103 paginiSeaPerch ROV Construction Manual - Standard Assembly - Version 2010-02 - DS013011amirrulasyrafÎncă nu există evaluări
- Appendix 2. Sub-Bottom ProfileDocument37 paginiAppendix 2. Sub-Bottom ProfileDik LanaÎncă nu există evaluări
- Hydro InternationalDocument36 paginiHydro InternationalMohammed HassanÎncă nu există evaluări
- Seaperch Rov Build Manual 2011-02 3Document33 paginiSeaperch Rov Build Manual 2011-02 3api-260945954Încă nu există evaluări
- Octansiii Ug Part 2 Octans Surface Ug Mu-octiii-003-ADocument32 paginiOctansiii Ug Part 2 Octans Surface Ug Mu-octiii-003-ApankajÎncă nu există evaluări
- Sonardyne Ranger 2Document2 paginiSonardyne Ranger 2Arnoldo López MéndezÎncă nu există evaluări
- GLS614 - CHAPTER 1C - Acoustic PositioningDocument59 paginiGLS614 - CHAPTER 1C - Acoustic PositioningHarith HnryusanÎncă nu există evaluări
- Floating Foundations For Offshore Wind TurbinesDocument37 paginiFloating Foundations For Offshore Wind TurbinesRiken Mangukiya100% (1)
- Pix4D White Paper - How Accurate Are UAV Surveying Methods PDFDocument8 paginiPix4D White Paper - How Accurate Are UAV Surveying Methods PDFpisterÎncă nu există evaluări
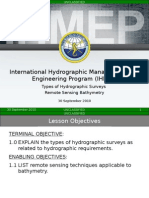
- 0101remote Sensing BathymetryPPDocument12 pagini0101remote Sensing BathymetryPPNanangHadiPurbowoÎncă nu există evaluări
- ROV BrochureDocument20 paginiROV BrochuredeanviapreeÎncă nu există evaluări
- Glendale PartnerDocument94 paginiGlendale PartnerPutri Mulia SariÎncă nu există evaluări
- Geophysics LecturesDocument224 paginiGeophysics LecturesgattÎncă nu există evaluări
- EBee Plus Drone User ManualDocument7 paginiEBee Plus Drone User ManualWilliam PulupaÎncă nu există evaluări
- Side Scan Sonar and Sub-Bottom Profiler SurveyingDocument29 paginiSide Scan Sonar and Sub-Bottom Profiler SurveyingAlfian RomadhoniÎncă nu există evaluări
- NaviPac Configuration1Document63 paginiNaviPac Configuration1sahal arifinÎncă nu există evaluări
- Transit Jackup BargeDocument5 paginiTransit Jackup BargeSeaworks CompanyÎncă nu există evaluări
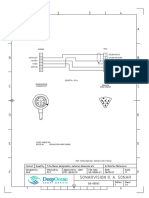
- Do 00032 E1Document1 paginăDo 00032 E1XhuLE7oÎncă nu există evaluări
- 91X Mini BeaconsDocument2 pagini91X Mini BeaconsXhuLE7oÎncă nu există evaluări
- Tss Dms-05 Dynamic Motion Sensor: Making Technology Work For You!Document2 paginiTss Dms-05 Dynamic Motion Sensor: Making Technology Work For You!XhuLE7oÎncă nu există evaluări
- TSS DMS-05 - BrochureDocument2 paginiTSS DMS-05 - BrochureXhuLE7oÎncă nu există evaluări
- Connecting External Power or An External Trigger To The BeaconDocument1 paginăConnecting External Power or An External Trigger To The BeaconXhuLE7oÎncă nu există evaluări
- 900 Series Mini Beacons: Technical SpecificationDocument2 pagini900 Series Mini Beacons: Technical SpecificationXhuLE7oÎncă nu există evaluări
- Layout - Survey With SB-216S and SeabatDocument1 paginăLayout - Survey With SB-216S and SeabatXhuLE7oÎncă nu există evaluări
- MST Transponder Instruction ManualDocument76 paginiMST Transponder Instruction ManualŞef Utas AwijÎncă nu există evaluări
- CDL TOGS - Datasheet PDFDocument2 paginiCDL TOGS - Datasheet PDFXhuLE7oÎncă nu există evaluări
- Ho9mB0oATC-107N DATASHEET V3.0 PDFDocument1 paginăHo9mB0oATC-107N DATASHEET V3.0 PDFXhuLE7oÎncă nu există evaluări
- 2000 Series CSS Manual 0017423 - Rev - A PDFDocument119 pagini2000 Series CSS Manual 0017423 - Rev - A PDFXhuLE7oÎncă nu există evaluări
- Carretes para MangueraDocument145 paginiCarretes para MangueraXhuLE7oÎncă nu există evaluări
- Valeport Midas CTDDocument67 paginiValeport Midas CTDXhuLE7oÎncă nu există evaluări
- Seanet Software TIL Eng Spec 074Document61 paginiSeanet Software TIL Eng Spec 074XhuLE7oÎncă nu există evaluări
- Operating System ToolsDocument4 paginiOperating System ToolsShivansh tomarÎncă nu există evaluări
- Lorem Ipsum - 100Document1 paginăLorem Ipsum - 100YeeLinGÎncă nu există evaluări
- FMOD ShortcutsDocument12 paginiFMOD ShortcutsidrummerÎncă nu există evaluări
- Telemecanique SR2B201BD DatasheetDocument6 paginiTelemecanique SR2B201BD DatasheetRahmat Maulidan MÎncă nu există evaluări
- UNIX NotesDocument4 paginiUNIX NotesAnil Kumar PatchaÎncă nu există evaluări
- ASP Dot Net Application Developer ResumeDocument2 paginiASP Dot Net Application Developer ResumekonnojuÎncă nu există evaluări
- MREL Recorders and Accessories ListDocument32 paginiMREL Recorders and Accessories ListForsacServis0% (1)
- Fyjc It ObjectivesDocument21 paginiFyjc It ObjectivesMayur Kundar100% (1)
- InTouchOMI WhileOpenning LogSampleDocument40 paginiInTouchOMI WhileOpenning LogSampleStanislav NosirevÎncă nu există evaluări
- Onboarding 2023Document68 paginiOnboarding 2023Cenk ErdincÎncă nu există evaluări
- 3.2.5.12 Lab - Exploring The World of Cybersecurity ProfessionalsDocument3 pagini3.2.5.12 Lab - Exploring The World of Cybersecurity ProfessionalsZeidan MohammadÎncă nu există evaluări
- Section 6 Host Link CommandsDocument35 paginiSection 6 Host Link CommandsvitexÎncă nu există evaluări
- Flow-Cytometers-Cytoflex-Lx-Uvbyri-Specification Sheet-2018-07Document2 paginiFlow-Cytometers-Cytoflex-Lx-Uvbyri-Specification Sheet-2018-07Crystal HarrisÎncă nu există evaluări
- Word Assignment PDFDocument2 paginiWord Assignment PDFSomik Jain0% (1)
- Installation Manual: DPS 232 Differential Positioning SystemDocument154 paginiInstallation Manual: DPS 232 Differential Positioning SystemVladimirs Arzeninovs100% (3)
- 50 Commands of LinuxDocument9 pagini50 Commands of Linuxsiphay900Încă nu există evaluări
- Computer SecurityDocument30 paginiComputer SecurityMuhammad AmmarÎncă nu există evaluări
- LinuxKI 4.1 CURSODocument78 paginiLinuxKI 4.1 CURSOXavi MilanÎncă nu există evaluări
- Mohit Malik Web Developer PortfolioDocument21 paginiMohit Malik Web Developer PortfolioMohit MalikÎncă nu există evaluări
- Variants of LINUXDocument7 paginiVariants of LINUXJake SullyÎncă nu există evaluări
- 510DP Service (Repair) ManualDocument432 pagini510DP Service (Repair) ManualAshok Karotra100% (1)
- EXP6Document10 paginiEXP6fatih_ealÎncă nu există evaluări
- H T M L 5: Ankit Singh 1Document193 paginiH T M L 5: Ankit Singh 1Roberto StepicÎncă nu există evaluări
- Distribusi Frekuensi Data Demografi Responden - Zahra M 2019Document3 paginiDistribusi Frekuensi Data Demografi Responden - Zahra M 2019Musdari RiantoÎncă nu există evaluări
- Java SwingDocument79 paginiJava Swingprafullmathur28100% (1)
- Tutorial On Extracting The Models.: October 2015 360 PostsDocument4 paginiTutorial On Extracting The Models.: October 2015 360 PostsAlucardw32Încă nu există evaluări
- iDeskSDK 2020-04-12 LogDocument4 paginiiDeskSDK 2020-04-12 LogDoddyÎncă nu există evaluări
- R TutorialDocument39 paginiR TutorialASClabISBÎncă nu există evaluări
- TQM Clause 45Document4 paginiTQM Clause 45MychaWongÎncă nu există evaluări
- Structured Web Documents in XML: Grigoris Antoniou Frank Van HarmelenDocument109 paginiStructured Web Documents in XML: Grigoris Antoniou Frank Van HarmelenKainat AnsarÎncă nu există evaluări