S-ar putea să vă placă și
- Trabajo Final Del CursoDocument11 paginiTrabajo Final Del CursoACH MusicÎncă nu există evaluări
- Informe N2 Valvula LimitadoraDocument13 paginiInforme N2 Valvula LimitadoraRonaldo CTÎncă nu există evaluări
- Trabajo Final Automatismo IndustrialDocument11 paginiTrabajo Final Automatismo IndustrialChristian CamaÎncă nu există evaluări
- Foro TematicoDocument5 paginiForo TematicoKleider Anthony100% (1)
- Circuitos electrohidráulicos básicosDocument20 paginiCircuitos electrohidráulicos básicosMarcell Araya CastilloÎncă nu există evaluări
- Cuaderno de Informe 9 Castro CalleDocument14 paginiCuaderno de Informe 9 Castro CalleItila Castro CalleÎncă nu există evaluări
- Circuitos Lógicos HidráulicosDocument7 paginiCircuitos Lógicos HidráulicosDiego RiveraÎncă nu există evaluări
- Hiduralica 2 SeemstreDocument19 paginiHiduralica 2 SeemstreAlexander Reykon ValverdeÎncă nu există evaluări
- Senat I 2021Document7 paginiSenat I 2021Axel BellidoÎncă nu există evaluări
- EEID-611 - CUADERNO DE INFORMES (Semana 3)Document17 paginiEEID-611 - CUADERNO DE INFORMES (Semana 3)JC BA0% (1)
- Diagrama Espacio - FaseDocument4 paginiDiagrama Espacio - FasediegoÎncă nu există evaluări
- Nº 08 Circuito Resistivo en ACDocument36 paginiNº 08 Circuito Resistivo en ACLuz Yoshimi MPÎncă nu există evaluări
- OBJETIVODocument13 paginiOBJETIVOanon-44998Încă nu există evaluări
- Valvulas Distribuidoras (Vias) y de MandoDocument26 paginiValvulas Distribuidoras (Vias) y de MandoMiguel ValderramaÎncă nu există evaluări
- ENTREGABLE 1Document6 paginiENTREGABLE 1grandasjoaoÎncă nu există evaluări
- Tarea Ii Christian Pareja PalominoDocument4 paginiTarea Ii Christian Pareja PalominoTrilce Huaman PaucarÎncă nu există evaluări
- Hidráulica ForoDocument3 paginiHidráulica ForoMarcos maxwellÎncă nu există evaluări
- Eeid Eeid-609 FormatoalumnotrabajofinalDocument8 paginiEeid Eeid-609 FormatoalumnotrabajofinalJhOselo Kala J̶ ̶t̶Încă nu există evaluări
- Semana 02 - NeumaticaDocument58 paginiSemana 02 - Neumaticajorge lara guzmanÎncă nu există evaluări
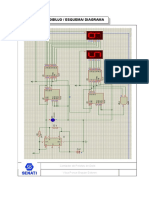
- Dibujo / Esquema/ Diagrama: Contador de Pelotas de Gold Vilca Ponce Brayan EstivenDocument2 paginiDibujo / Esquema/ Diagrama: Contador de Pelotas de Gold Vilca Ponce Brayan Estivenbrayan estiven vilca ponceÎncă nu există evaluări
- Foro TematicoDocument2 paginiForo TematicoEdinson Kevin Mayo CulquicondorÎncă nu există evaluări
- TemperaturaDocument36 paginiTemperaturaEnderson IbarraÎncă nu există evaluări
- CV Fernando Sanchez EcharatiDocument5 paginiCV Fernando Sanchez EcharatiRoberth Junior Luque GironÎncă nu există evaluări
- Mando SecuencialDocument23 paginiMando Secuencialfranklingiovanni100% (2)
- Qué Es Un Sistema de BombeoDocument15 paginiQué Es Un Sistema de BombeoAlejandro Cetina MiamÎncă nu există evaluări
- Sistemas HidraulicosDocument9 paginiSistemas HidraulicosJamil Alvarez RiveraÎncă nu există evaluări
- Autoevaluación Tema 1Document11 paginiAutoevaluación Tema 1olmedo_86Încă nu există evaluări
- Actividad Entregable 2Document20 paginiActividad Entregable 2Danny EslavaÎncă nu există evaluări
- Hoja de Proceso en Blanco 201810Document5 paginiHoja de Proceso en Blanco 201810Saturnino Calero MezaÎncă nu există evaluări
- Cuaderno de Informe 1Document15 paginiCuaderno de Informe 1jeffersonÎncă nu există evaluări
- ForoDocument2 paginiForoJose OrtegaÎncă nu există evaluări
- MaterialndenapoyonPulsadoresnynselectoresnterr 205e97c52f28088Document14 paginiMaterialndenapoyonPulsadoresnynselectoresnterr 205e97c52f28088JHON ALEXANDER MONTANA LOPEZÎncă nu există evaluări
- Principio de Funcionamiento de Partes Basicas de Un Sistema HidraulicoDocument20 paginiPrincipio de Funcionamiento de Partes Basicas de Un Sistema HidraulicoClaudio Saavedra0% (1)
- Practica 7 Estrella Triángulo HMIDocument6 paginiPractica 7 Estrella Triángulo HMIStalyn BanegasÎncă nu există evaluări
- OptoacopladorDocument13 paginiOptoacopladorLeonardo RomoÎncă nu există evaluări
- Informe Tecnico Grupo Conico BeraunDocument5 paginiInforme Tecnico Grupo Conico BeraunDeivy Rick Meza BaquerizoÎncă nu există evaluări
- Alineamiento 11Document6 paginiAlineamiento 11Jimmy Ocaña MonteroÎncă nu există evaluări
- A Ctu AdoresDocument3 paginiA Ctu AdoresEduardo CruzÎncă nu există evaluări
- Sistemas electrohidráulicos: principios, componentes y aplicacionesDocument10 paginiSistemas electrohidráulicos: principios, componentes y aplicacionesPiero VivarÎncă nu există evaluări
- Electrohidraulica - Escano PDFDocument231 paginiElectrohidraulica - Escano PDFMateo Sosa Machado67% (6)
- Tarea para Folder de Vargas Semana 3Document15 paginiTarea para Folder de Vargas Semana 3Ronaldiño Limas CadilloÎncă nu există evaluări
- Trabajo Final Dibujo Tecnico para Electrotecnia.Document12 paginiTrabajo Final Dibujo Tecnico para Electrotecnia.Inmar MelendrezÎncă nu există evaluări
- Trabajo Erlectronica BasicaDocument8 paginiTrabajo Erlectronica BasicaLiss PeraltaÎncă nu există evaluări
- Bombas Hidráulicas de PaletasDocument4 paginiBombas Hidráulicas de PaletasGino BenjaminÎncă nu există evaluări
- Taller de ElectroneumaticaDocument7 paginiTaller de ElectroneumaticaYERSON IVAN REYES MORENOÎncă nu există evaluări
- Eeid Eeid-609 FormatoalumnotrabajofinalDocument15 paginiEeid Eeid-609 FormatoalumnotrabajofinalJhon VilcaÎncă nu există evaluări
- Circuitos NeumaticosDocument9 paginiCircuitos NeumaticosSantiAspreaÎncă nu există evaluări
- Actividad EntregableDocument11 paginiActividad EntregableRhonny NaverosÎncă nu există evaluări
- Control PID temperaturaDocument4 paginiControl PID temperaturaLuisvarÎncă nu există evaluări
- Senati Plantilla Power PointDocument18 paginiSenati Plantilla Power PointMarco Antonio Gonzales LenesÎncă nu există evaluări
- Simbolos GraficosDocument3 paginiSimbolos Graficoscratos danteÎncă nu există evaluări
- Foro de Tecnologia de La ElectricidadDocument3 paginiForo de Tecnologia de La ElectricidadFranco OrtizÎncă nu există evaluări
- 04 - Arranque Estrella-Triángulo (Explicación) PDFDocument11 pagini04 - Arranque Estrella-Triángulo (Explicación) PDFMaria planellerÎncă nu există evaluări
- Hidraulica 6Document13 paginiHidraulica 6Eber LlanosÎncă nu există evaluări
- Informe #6 Cilindros de Simple Efecto y Doble EfectoDocument23 paginiInforme #6 Cilindros de Simple Efecto y Doble EfectoLuis Enrique Iglesias100% (1)
- PDF Del Diagrama de Procesos Del GasDocument10 paginiPDF Del Diagrama de Procesos Del GasAbraham Aramayo ReynagaÎncă nu există evaluări
- Mandos HidraulicosDocument6 paginiMandos HidraulicosLuisMendozaÎncă nu există evaluări
- Circuitos ElectroneumáticosDocument1 paginăCircuitos ElectroneumáticosgefrancoÎncă nu există evaluări
- Secuencia y Tabla de Verdad PARCIALDocument11 paginiSecuencia y Tabla de Verdad PARCIALffÎncă nu există evaluări
- Metodo Tabla de Secuencias Circuitos Neumaticos e HidraulicosDocument11 paginiMetodo Tabla de Secuencias Circuitos Neumaticos e Hidraulicosjlcorsan9117Încă nu există evaluări
- Ejemplo E-4.8 Ejercicio 27.35 Fuerza y Torque Sobre Una Espira Sears 12edDocument1 paginăEjemplo E-4.8 Ejercicio 27.35 Fuerza y Torque Sobre Una Espira Sears 12edAbraham PachecoÎncă nu există evaluări
- Ejemplo Trazo Del Lugar de Las Raíces-Diagrama de AlgoritmoDocument13 paginiEjemplo Trazo Del Lugar de Las Raíces-Diagrama de AlgoritmoAbraham PachecoÎncă nu există evaluări
- Neum Met Cascada Disp para DoblarDocument7 paginiNeum Met Cascada Disp para DoblarAbraham PachecoÎncă nu există evaluări
- Simbologia Neumática e HidraúlicaDocument10 paginiSimbologia Neumática e Hidraúlicarpo2010100% (15)
- Reconocimiento Geológico de Yura, Arequipa - Perú - Explorock - Blog de Las Geociencias y ExploraciónDocument21 paginiReconocimiento Geológico de Yura, Arequipa - Perú - Explorock - Blog de Las Geociencias y ExploraciónBrayanChoquehuancaÎncă nu există evaluări
- Bioquímica Humana (ENFERMERÍA)Document5 paginiBioquímica Humana (ENFERMERÍA)Hugo LauÎncă nu există evaluări
- Fármacos Hipolipemiantes: HipercolesterolemiaDocument21 paginiFármacos Hipolipemiantes: HipercolesterolemiaAivree DreowoneÎncă nu există evaluări
- Adoracion 1Document26 paginiAdoracion 1Abisai AlvaradoÎncă nu există evaluări
- Sesion #01 y 02-CstDocument48 paginiSesion #01 y 02-CstBryan LoayzaÎncă nu există evaluări
- Actividad 11 Operaciones Matriciales CINDY HERRERADocument18 paginiActividad 11 Operaciones Matriciales CINDY HERRERACindy HerreraÎncă nu există evaluări
- Alquilación de Friedel-CraftsDocument2 paginiAlquilación de Friedel-Craftsariel100% (1)
- Solaris. Stanislaw LemDocument209 paginiSolaris. Stanislaw Lemacalvoalv0% (1)
- Syllabus MORF 300 201720Document8 paginiSyllabus MORF 300 201720Fernando Ignacio Salas Reyes100% (1)
- Normas LegalesDocument9 paginiNormas LegalesAngieOjedaÎncă nu există evaluări
- Macro Tema 5Document21 paginiMacro Tema 5belenÎncă nu există evaluări
- ResumenDocument6 paginiResumenmatiasÎncă nu există evaluări
- Ejercicio # 1lexico MedicoDocument2 paginiEjercicio # 1lexico MedicoHenry Leroy Lewis BatresÎncă nu există evaluări
- Energia Solar Fotovoltaica Comunidad ValencianaDocument4 paginiEnergia Solar Fotovoltaica Comunidad ValencianaBlanca Gomez Rodriguez-AriasÎncă nu există evaluări
- FT - Frontier Pro4X - 2012Document1 paginăFT - Frontier Pro4X - 2012Juan CarlosÎncă nu există evaluări
- Informacion Basica PanaderiaDocument6 paginiInformacion Basica PanaderiajuanapbaezÎncă nu există evaluări
- Heridas y CicatrizacionDocument38 paginiHeridas y Cicatrizacionsirenita33Încă nu există evaluări
- Actividad 4Document8 paginiActividad 4Luz Angela Henao NavarroÎncă nu există evaluări
- Como Se Puede Hacer Una Clase Invertida RDocument3 paginiComo Se Puede Hacer Una Clase Invertida Rapi-399932263Încă nu există evaluări
- Balance de Reacciones RedoxDocument4 paginiBalance de Reacciones RedoxLinoGiovannyLeonDelgadoÎncă nu există evaluări
- Colmena Siglo XVIIIDocument22 paginiColmena Siglo XVIIIAnonymous WdGQ0KeÎncă nu există evaluări
- Tema: - Introducción A Las GráficasDocument5 paginiTema: - Introducción A Las GráficasJONATHAN PONCEÎncă nu există evaluări
- Proyecto 2 Primer GradoDocument38 paginiProyecto 2 Primer GradoFireXXXÎncă nu există evaluări
- TEORÍA GENERAL DE LA PRUEBA EN GUATEMALADocument12 paginiTEORÍA GENERAL DE LA PRUEBA EN GUATEMALAPotter EstradaÎncă nu există evaluări
- 2inh Incrustación RE5789SCW PDFDocument6 pagini2inh Incrustación RE5789SCW PDFluis rivasÎncă nu există evaluări
- HBP CA Próstata Litiasis UrinariaDocument2 paginiHBP CA Próstata Litiasis UrinariaBrandon Miguel Gaytan CaychoÎncă nu există evaluări
- El MetodoDocument2 paginiEl MetodostreyiitaÎncă nu există evaluări
- ResoluciónDocument3 paginiResoluciónAndres LobatoÎncă nu există evaluări
- Calibracion Tamiz 2023Document84 paginiCalibracion Tamiz 2023Mike Valderrama AntaurcoÎncă nu există evaluări
- Ficha COMU, 11 de AgostoDocument5 paginiFicha COMU, 11 de AgostoGerber Miguel Mendoza TiconaÎncă nu există evaluări