Documente Academic
Documente Profesional
Documente Cultură
Manuals Romania
Încărcat de
PeTru MocanDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Manuals Romania
Încărcat de
PeTru MocanDrepturi de autor:
Formate disponibile
- 1 -
Manuale Scurte pentru Laboratorul la
Distan al PEMCWebLab
Versiunea Romn
Timioara 2008
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n cadrul
programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate de autori nu
reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo responsabilitate din partea
acesteia.
- 2 -
Cartea Manualelor Scurte
ale Laboratoarelor la Distan
PEMCWebLab
Versiunea Romn
Copyright
ISBN 978-80-7204-625-6
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n cadrul
programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate de autori nu
reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo responsabilitate din partea
acesteia.
- 3 -
Cuprins
1.1 Circuite Redresoare Monofazate i Trifazate . . . . . . . . . . . . 5
Universitatea Politehnica Timioara
1.2. Msurarea Circuitelor de Curent Continuu i a
Circuitelor Rezonante de Curent Alternativ . . . . . . . . . . . . . . 13
Universitatea Politehnica Timioara
2.1 Electronic de Putere . . . . . . . . . . . . . . . . . . . . 19
Universitatea de Tehnologie Delft
2.2 Corecia Factorului de Putere . . . . . . . . . . . . . . . . . 39
Universitatea Politehnica Timioara
2.3 Modulaia Impulsurilor n Durat . . . . . . . . . . . . . . . . 44
Universitatea de Tehnologie Warsaw
2.4 Convertor c.c. c.c. pentru Sursele de Energie Regenerabile i Microreele . 52
Institutul Naional Politehnic din Lorraine
2.5 Calitatea Puterii i Filtre Active . . . . . . . . . . . . . . . . . 60
Universitatea Ruhr din Bochum
2.6 Dinamica unei Comenzi de Acionare a unui
Motor Asincron cu Convertor DC/DC . . . . . . . . . . . . . . . . 69
Universitatea Tehnic Naional din Atena
3.1 Generator Sincron . . . . . . . . . . . . . . . . . . . . . 77
Universitatea Tehnic Trencin
3.2 Msurarea Motoarelor de Curent Continuu . . . . . . . . . . . . 83
Universitatea de Tehnologie Brno
3.3 Motorul de Curent Continuu . . . . . . . . . . . . . . . . . 89
Universitatea Tehnic Trencin
3.4 Motorul Asincron . . . . . . . . . . . . . . . . . . . . . . 94
Universitatea Tehnic Trencin
4.1 Elementele de Baz ale Teleroboticii bazat pe Internet . . . . . . . . 100
BMGE Budapesta
4.2 Mecatronic i Hardware n Simularea Buclelor . . . . . . . . . . . 120
Universitatea din Maribor
4.3 Acionri cu Dinamic Ridicat Comanda Micrii . . . . . . . . . 129
Universitatea de Tehnologie Vienna
4.4 Acionri Electrice Automobilistice . . . . . . . . . . . . . . . . 136
Universitatea de Tehnologie Brno
4.5 Sistem de Rezervoare de Ap Comandat cu Minicontrollere Logice . . . . 143
Universitatea Tehnic Kosice
4.6 Sistem de Transportoare Controlate de SLC . . . . . . . . . . . . 153
Universitatea Tehnic Kosice
- 4 -
Introducere
n Laboratoarele Comandate la Distan
PEMC WebLab
- 5 -
Modulul 1.1
Circuite Redresoare Monofazate i Trifazate
Universitatea Politehnica Timioara
Autori: Dan Lascu
Dan Negoiescu
Mihaela Lascu
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n cadrul
programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate de autori nu
reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo responsabilitate din partea
acesteia.
- 6 -
1.1 Circuite Redresoare Monofazate i Trifazate
n laboratorul web al PUT s-a elaborat un laborator complex de la distan legat de
redresoarele necomandate. Conexiunea de la distan a experimentului este explicat n
seciunea experimentelor online pe pagina web. Pentru a rula experimentul de la distan
"Circuite redresoare monofazate i trifazate", studentul trebuie s aib instalat pe computerul
su personal LabView Run Time Engine 8.0.1.
La rezervare experimentului va aprea fereastra SELECTION FRONT PANEL
(panoul frontal de selecie). Utilizatorul va comuta ntre dou panouri frontale:
SELECTION FRONT PANEL i MEASUREMENT FRONT PANEL (panoul frontal de
msurare). Funciile acestor panouri sunt explicate n documentul Manualul Redresoarelor.
Obiectivele experimentelor:
Conceptele de baz ale redresoarelor:
Natura neliniar a circuitelor redresoare,
Funcionarea redresoarelor este strict dependent de sarcin,
Rolul diodei de nul.
Funcionarea redresorului cu priz median.
Funcionarea punii monofazate:
Sarcina inductiv,
Sarcina capacitiv detecia de vrf
Avantajele i dezavantajele dintre punte i configuraia cu priz median
Dublorul de tensiune
Redresor trifazat simplu cu diode:
Funcionarea sub forma a trei redresoare monofazate, cu curent de sarcin
interschimbabil cnd sarcina este inductiv (analogia cu circuitul SAU)
Principiul de funcionare al redresorului trifazat n punte, sub forma a dou redresoare
trifazate simple, independente:
Sarcinile inductive i capacitive,
Avantajele i dezavantajele redresorului n punte n comparaie cu redresorul trifazat
simplu.
Proiectarea redresorului trifazat cu punte.
Simularea se va efectua folosind pachetul CASPOC. Dac nu se specific altfel, toate
tensiunile sunt raportate ca referin n funcie de nodul de mas. Pentru a urmri formele de
und ale tensiunii i curentului, cu acelai osciloscop, folosii butoanele de amplificare la
afiarea curenilor. Pentru fiecare experiment amplitudinea tensiunii de intrare se va msura
separat nainte de alte msurtori.
Tema 1 Redresor monoalternan sarcin rezistiv
Mai nti Simulai apoi Rulai Experimentul 1:
Redresor monoalternan sarcin rezistiv
Tema 1.1 Analizai formele de und ale tensiunii
de intrare v
2
i tensiunii de ieire v
0
. Explicai de
ce amplitudinea tensiunii de ieire este puin mai
mic dect tensiunea de intrare.
Tema 1.2 Examinai spectrul tensiunii de intrare
i tragei concluziile referitoare la puritatea sa
spectral. Msurai valoarea sa efectiv,
amplitudinea sa i THD-ul su, verificnd dac se
poate atribui tensiunii de intrare un caracter
R
25
~
ro
1
D
vo
v2
io
50V
50H
z
i2
r2
1
Exp 1
- 7 -
1.1 Circuite Redresoare Monofazate i Trifazate
sinusoidal. ntr-o astfel de situaie, estimai valorile medii i efective ale tensiunii de ieire.
Tema 1.3 Msurai valorile medii i efective tensiunii de ieire folosind butoanele de
msurare corespunztoare, amplasate deasupra osciloscopului. Comparai valorile msurate
cu cele teoretice, calculate anterior. Analizai spectrul tensiunii de ieire i forma i und i
tragei concluziile referitoare la frecvena sa fundamental i la armonici (pare i impare).
Tema 1.4 Vizualizai pe acelai osciloscop curentul de ieire i
0
mpreun cu de tensiunea de
ieire i estimai teoretic valoarea sa medie i efectiv. Cum sunt asociate aceste valori
valorilor corespunztoare ale tensiunii de ieire? Dai un PrintScreen (tiprire ecran) al
spectrului curentului de sarcin (se va folosi ulterior pentru comparaie). Reinei c v
2
este
tensiunea din secundarul unui transformator. Analizai curentul absorbit de la surs i corelai-
l cu curentul de ieire. Care este dezavantajul folosirii unui astfel de redresor din punctul de
vedere al formei curentului de intrare.
Tema 2 - Redresor monoalternan sarcin rezistiv
Mai nti Simulai apoi Rulai Experimentul 2: Redresor monoalternan sarcin inductiv
Tema 2.1 Analizai formele de und ale
tensiunii de intrare v
2
i tensiunii de ieire v
0
.
Explicai din punct de vedere calitativ partea
negativ a formei de und din tensiunea de
ieire. Msurai tensiunea de ieire medie.
Tema 2.2 Examinai curentul de ieire corelat
cu tensiunea de ieire i specificai dac
valoarea unghiului de conducie al diodei este
mai mare sau mai mic dect jumtatea
perioadei reelei (180
o
ntr-o abscis
unghiular). Msurai vrful curentului de
sarcin i efectuai PrintScreen-uri separate ale
spectrelor tensiunii de ieire i curentului de ieire (se vor folosi ulterior n experiment).
Mai nti Simulai apoi Rulai Experimentul 3: Redresor monoalternan sarcin inductiv
ntr-o astfel de situaie configuraia circuitului este aceeai cu excepia faptului c
valoarea rezistorului de sarcin a sczut la 25.
Tema 2.3 Ce s-a ntmplat cu partea negativ a tensiunii de ieire? Dai o explicaie fizic a
fenomenului. Efectuai msurarea tensiunii medii de ieire i explicai de ce este mai mic
dect aceeai valoare msurat la Tema 1.3 i Tema 2.1. Msurai, de asemenea, ct timp este
n conducie dioda i prin urmare unghiul de conducie al diodei .
Tema 2.4 Lund n considerare rezultatele de la toate temele de mai sus, deducei ecuaia
diferenial a curentului prin inductor. Soluionai literal aceast ecuaie i determinai
valoarea de vrf a curentului de sarcin i unghiul de conducie al diodei. Indiciu: pentru a
determina unghiul de conducie al diodei impunei, pentru a doua oar, valoarea zero pentru
curentul prin inductor (evident c, curentul inductor pornete de la zero la nceputul fiecrei
perioade). Reinei c este dat de o ecuaie transcendent care trebuie rezolvat numeric.
Verificai dac, calculele dumneavoastr corespund cu msurtorile efectuate prin calculul
teoretic al tensiunii medii de ieire.
Tema 2.5 Msurai valoarea medie a curentului de sarcin. Aceast valoare este mai mic sau
mai mare dect cea din cazul rezistiv (Tema 1.4)? Explicai de ce. Msurai valoarea vrfului
curentului de sarcin i comparai-o cu aceeai valoare msurat la Tema 2.2. i dai explicaii
referitoare la diferene. Comparai, de asemenea, spectrul tensiunii i curentului cu cele
salvate anterior la Tema 2.2 raportnd toate armonicile la valoarea medie. Ce putei spune
despre natura sarcinii vzute ca un filtru de curent?
L
60mH
1.15
R
94
(25)
~
ro
1
D
vo
v2
io
50V
50Hz
i2
r2
1
Exp 2
(Exp3)
- 8 -
1.1 Circuite Redresoare Monofazate i Trifazate
Tema 3 - Redresor monoalternan sarcina inductiv i dioda de nul
Mai nti Simulai apoi Rulai Experimentul 4: Redresor monoalternan sarcin inductiv
i diod de nul. Acest experiment prezint conceptul diodei de nul, asociat ntotdeauna
sarcinilor inductive.
Tema 3.1 Analizai simultan formele de
und ale tensiunii de intrare v
2
tensiunii de
ieire v
0
, curentului prin dioda redresoare D
1
i
2
i curentului prin dioda de nul i
D2
. Lund
n considerare felul n care conduc cele dou
diode, explicai forma tensiunii de ieire.
Reinei c tensiunea de ieire este uor
negativ n jumtatea negativ a perioadei
tensiunii de intrare. Care este cauza unui
astfel de comportament?
Tema 3.2 Msurai tensiunea medie de ieire
i comparai-o cu valoarea msurat n cazul
rezistiv (Tema 1.3). Explicai diferena ntre cele dou valori. n ce situaie, tensiunea de
intrare i tensiunea de ieire se pot considera n ambele situaii identice?
Tema 3.3 n aceeai fereastr vizualizai curenii diodelor i
2
i i
D2
i curentul de sarcin i
o
.
Indicai o relaie ntre valorile instantanee i verificai experimental corelaia dintre valorile
lor medii. Comparai valoarea medie a curentului de sarcin i spectrele cu cele din cazul
rezistiv i din cazul cu sarcin inductiv (Tema 1.4 i 2.4). Examinai curentul de sarcin i
decidei dac atinge zero sau nu. Demonstrai matematic rspunsul dumneavoastr. Prezentai
dou avantaje importante de folosire a diodei de nul n cazul unei sarcini inductive.
Tema 4 - Redresor monoalternan sarcin capacitiv
Mai nti Simulai apoi Rulai Experimentul 5: Redresor monoalternan sarcin capacitiv
Tema 4.1 Examinai formele de und ale
tensiunii de intrare v2 i tensiunii de ieire v
0
alturi de curentul prin diod i
2
. Cum este
asociat ncrcarea capacitiv cu conducia
diodei? Cu ce fel de circuit analogic
seamn aceast configuraie? Care va fi
tensiunea de ieire medie n situaia unei
valori capacitive deosebit de mari?
Tema 4.2 Msurai tensiunea medie de
ieire i explicai de ce rezultatul nu este n
conformitate cu valoarea teoretic
specificat mai sus. Estimai pulsaia
tensiunii de ieire n funcie de constanta de timp a sarcinii RC, frecvena tensiunii de intrare f
i amplitudinea V
M
. Lund n consideraie formula pulsaiei, mbuntii estimarea
dumneavoastr asupra valorii tensiunii de ieire. Msurai pulsaia vrf la vrf a tensiunii de
ieire i comparai-o cu ateptrile dumneavoastr teoretice, apoi explicai de ce apar
diferene.
Tema 4.3 Msurai valorile unghiului de conducie a diodei , curentul mediu i curentul de
vrf al diodei. Msurai, de asemenea, curentul mediu de sarcin i comparai-l cu valoarea
medie a curentului prin diod. Explicai de ce cele dou valori medii sunt identice, dei
formele de und sunt complet diferite.
R
25
ro
1
D1
vo
io
D2
rD2
1
iD2
~
v2
50V
50Hz
i2
r2
1
Exp 4
L
60mH
1.15
C
470F
(235 F)
R
94
ro
1
D
vo
io
~
v2
50V
50Hz
i2
r2
1
Exp 5
(Exp 6)
- 9 -
1.1 Circuite Redresoare Monofazate i Trifazate
Tema 4.4 Examinai spectrul curentului de intrare i msurai THD-ul su (se va face referire
la el mai ncolo n cadrul experimentului).
Mai nti Simulai apoi Rulai Experimentul 6: Redresor monoalternan sarcin
capacitiv
Acest experiment este la fel ca cel anterior, dar cu jumtate din valoarea
condensatorului.
Tema 4.5 Msurai pulsaia tensiunii de ieire. Ce a determinat creterea pulsaiei tensiunii de
ieire fa de valoarea msurat la Tema 4.2? Msurai unghiul de conducie al diodei ,
valoarea medie i de vrf a curentului prin diod, dup care comparai aceste valori cu cele
msurate la Tema 4.3. Explicai diferenele.
Tema 4.6 Examinai spectrul curentului de intrare, msurai THD-ul su i comparai-l cu cel
din Tema 4.4. Tragei cteva concluzii calitative cu privire la diferene. Afiai tensiunea i
curentul de ieire mpreun i urmrii forma lor similar.
Tema 5 Redresor bialternan cu priz median
Mai nti Simulai apoi Rulai Experimentul 7: Redresor bialternan cu priz median
sarcin inductiv
Tema 5.1 Examinai cele dou tensiuni de
intrare v
21
i v
22
i urmrii proprietatea lor de
defazare. Aceste tensiuni sunt obinute n
secundarul unui transformator cu priz
median. Explicai funcionarea redresorului,
considernd c prin sarcin curentul nu atinge
niciodat zero i descompunei-l n dou
redresoare monoalternan independente,
fiecare alimentat de una din cele dou
tensiuni de intrare. Explicai funcionarea
gsind asemnrile cu un circuit logic SAU.
Tema 5.2 Afiai tensiunea de ieire i
specificai frecvena sa fundamental. Aproximai tensiunea medie de ieire n funcie de
amplitudinea tensiunii de intrare. Msurai aceast valoare i verificai dac rezultatul
dumneavoastr este ntemeiat. Afiai tensiunea pe dioda D
1
, v
D1
i reinei valoarea sa de vrf
(solicitarea n tensiune a diodei). Reinei c tensiunea de ieire prezint valori negative mici
la trecerea prin zero a tensiunii de intrare. Explicai acest comportament. Indiciu: Luai n
considerare faptul c diodele nu au comutaia ideal. Cum putei explica faptul c nu exist
pri negative semnificative ale tensiunii de ieire (la fel ca n cazul monoalternan) dei se
conecteaz aceeai sarcin inductiv?
Tema 5.3 Examinai curentul de sarcin i formele de und ale tensiunilor. Care sunt motivele
pentru care curentul de sarcin este mult mai neted dect n cazul monoalternan? Msurai
valoarea media a curentului de sarcin. Dai relaia dintre curentul mediu de sarcin i
valoarea tensiunii de sarcin. Aceast valoare medie este influenat de inductor? Explicai de
ce. Afiai spectrele v
0
, i
0
i i
2
i dai un PrintScreen pentru fiecare dintre ele (se vor folosi
pentru comparaie).
Tema 5.4 Afiai curentul i
2
alturi de tensiunea i curentul de ieire. Cum explicai formele
lor i care este unghiul de conducie al diodei ? Msurai valoarea medie a lui i
2
i comparai-
o cu valoarea medie a curentului de sarcin. Explicai modul n care aceste valori sunt corelate
ntre ele.
R
25
ro
1
D1
vo
io
D2
v22
~
v21
50V
50Hz
i21
r2
1
~
50V
50Hz
Exp 7
vD1
L
60mH
1.15
- 10 -
1.1 Circuite Redresoare Monofazate i Trifazate
Mai nti Simulai apoi Rulai Experimentul 8: Redresor bialternan cu priz median
sarcin capacitiv. Se folosete aceeai sarcin cu acelai filtru capacitiv, la fel ca n cazul
monoalternan (Experiment 5).
Tema 5.5 Examinai tensiunea de ieire i
msurai valoarea sa medie, frecvena
fundamentalei i pulsaia vrf la vrf.
Explicai de ce pulsaia este aproximativ
jumtate comparativ cu cea din cazul
monoalternan (Tema 4.2.) dei sarcina
este aceeai. Reinei c dei forma tensiunii
de ieire este diferit fa de cazul sarcinii
inductive (analizat anterior), armonicile
tensiunii de ieire sunt la aceleai frecvene.
Comparai spectrul tensiunii de ieire cu cel
din cazul sarcinii inductive. Care spectru
este mai bun?
Tema 5.6 Msurai valoarea medie a curentului de sarcin. Comparai spectrul curentului de
sarcin n cele dou cazuri i explicai diferenele.
Tema 5.7 Msurai valoarea de vrf a curentului diodei D
1
i unghiul su de conducie .
Examinai spectrul curentului de intrare i comparai-l cu cazul sarcinii inductive (Tema 5.3).
Care este frecvena fundamentalei curentului de intrare?
Mai nti Simulai apoi Rulai Experimentul 9: Redresor bialternan cu priz median
sarcin capacitiv. Acesta este acelai experiment ca cel anterior, dar cu o valoare a
rezistenei de sarcin mai mare.
Tema 5.8 Msurai valorile medii ale tensiunii de ieire i curentului i explicai de ce ele s-au
schimbat fa de experimentul anterior.
Tema 5.9 Examinai pulsaia tensiunii de ieire i explicai de ce aceasta a sczut. Msurai,
de asemenea, valoarea vrfului curentului de intrare i unghiul de conducie al diodelor i
comparai-le cu cazul anterior. Furnizai anumite explicaii calitative pentru aceste valori
diferite.
Tema 5.10 Enumerai cel puin patru avantaje principale ale topologiei cu priz median fa
de redresorul monoalternan. Indiciu: urmrii calitatea tensiunii de ieire comparativ cu o
tensiune continu pur, solicitarea n curent a diodei i netezimea curentului de sarcin.
Tema 6 Redresorul bialternan n punte
Mai nti Simulai apoi Rulai Experimentul 10: Redresor bialternan n punte sarcin
inductiv
Tema 6.1 Examinai formele de und ale
tensiunii de ieire i curentului. Msurai
frecvena fundamentalelor i valorile
medii i comparai-le apoi cu cazul cu
priz median (Tema 5.2, 5.3). Explicai
de ce valorile medii n cazul punii sunt
puin mai mici dect n cazul cu priz
median. Comportamentul este similar din
punct de vedere al formelor de und ale
tensiunii de ieire i curentului? Explicai
de ce, cele dou poriuni redresate pe
jumtate de perioad ale tensiunii de ieire
R
25
(94)
ro
1
D1
vo
io
D2
v22
~ v21
50V
50Hz
i21
r2
1
~
50V
50Hz
C
470F
Exp 8
(Exp 9)
R
25
ro
1
D1
vo
io
D4
D2
D3
rD2
1
iD2
~
v2
50V
50Hz
i2
r2
1
Exp 10
N
P
L
60mH
1.15
- 11 -
1.1 Circuite Redresoare Monofazate i Trifazate
nu sunt identice n ceea ce privete valoarea lor de vrf i prin urmare, exist o asimetrie n
forma pulsatorie a curentului de sarcin.
Tema 6.2 Comparai curentul i
D2
cu curentul printr-una din diodele din cazul cu priz
median. (vezi Printscreen corespunztor de la Tema 5.3). Comparai, de asemenea, valorile
lor medii (vezi Tema 5.4) i explicai de ce sunt aproape egale. Msurai solicitarea n
tensiune a diodei D
1
i comparai-o cu solicitarea similar a diodei la redresorul cu priz
median (Task 5.2). Explicai valorile acestor solicitri.
Tema 6.3 Trasai teoretic formele de und v
P
i v
N
i aproximai valorile lor medii. Apoi,
vizualizai aceste forme de und i msurai valorile lor medii i comparai-le cu ateptrile
teoretice. Dovedii c redresorul cu punte se poate diviza n dou redresoare monoalternan
independente (eventual cu diode de nul)? Redesenai schema pentru a scoate n eviden cele
dou redresoare independente.
Tema 6.4 Afiai curentul de intrare i
2
i spectrul su. Verificai c exist numai armonici
impare i c nu exist o component continu. Comparai-l cu spectrul curentului de intrare
din cazul cu priz median (Tema 5.3). Estimai modul n care transformatorul este solicitat
din punctul de vedere al magnetizrii n cazul punii i n cazul cu priz median. Indiciu:
raportai toi curenii la primar. Msurai THD-ul curentului de intrare i factorul de putere de
intrare.
Mai nti Simulai apoi Rulai Experimentul 11: : Redresor bialternan n punte sarcin
capacitiv
Tema 6.5 Examinai formele de und ale tensiunii i curentului de ieire. Msurai frecvena
fundamentalei tensiunii de ieire, valoarea medie i pulsaia, dup care comparai-le cu cazul
cu priz median (Tema 5.5). Comportamentul este similar din punctul de vedere al formelor
de und ale tensiunii i curentului de ieire? Msurai valoarea medie a curentului de sarcin.
Tema 6.6 Comparai curentul i
D2
cu curentul prin una din diode din cazul cu priz median
(Tema 5.7).
Tema 6.7 Afiai curentul de intrare i
2
i spectrul su i facei un PrintScreen. De ce este
valoarea negativ maxim mai redus dect valoarea maxim pozitiv? Exist n spectrul
curentului de intrare numai armonici impare? Motivai-v rspunsul. Comparai-l cu spectrul
curentului de intrare n cazul cu priz
median (Tema 5.7) i n cazul punii cu
sarcin inductiv (Tema 6.4).
Tema 6.8 Msurai THD-ul curentului de
intrare i factorul de putere de intrare.
Tragei cteva concluzii despre factorul de
putere n cazul sarcinilor inductive i
capacitive. Facei o comparaie ntre
redresoarele cu punte cu sarcin inductiv
i capacitiv. Urmrii urmtoarele
aspecte: ct de aproape este tensiunea de
ieire comparativ cu o tensiune continu
pur, ct de aproape este curentul de ieire comparativ cu un curent continuu pur, solicitrile
n curent ale diodei n funcie de curentul mediu de sarcin, consideraii asupra factorului de
putere.
Tema 6.9 Comparai puntea cu topologia cu priz median n toate aspectele pe care vi le
putei imagina. Furnizai rezultatele n forma unui tabel.
Tema 7 Dublorul de tensiune
Mai nti Simulai apoi Rulai Experimentul 12: Dublorul de tensiune sarcin rezistiv
R
25
ro
1
D1
vo
io
D4
D2
D3
rD2
1
iD2
~
v2
50V
50Hz
i2
r2
1
C
470F
Exp 11
- 12 -
1.1 Circuite Redresoare Monofazate i Trifazate
Tema 7.1 Explicai funcionarea dublorului de tensiune privindu-l ca dou redresoare
monoalternan independente, cu sarcin capacitiv, avnd sarcina conectat ntre ieirile lor.
Specificai elementele care aparin fiecruia din cele dou redresoare monoalternan.
Tema 7.2 Msurai tensiunile v
P
i v
N
i tragei o concluzie cu privire la starea diodelor D
2
i
D
3
. Corespunde aceast concluzie consideraiilor teoretice anterioare referitoare la
funcionarea dublorului de tensiunea. Explicai de ce v
P
i v
N
sunt n oglind una fa de
cealalt i defazate.
Tema 7.3 Msurai tensiunea medie de
ieire i frecvena sa. Realizai o simulare
cu un condensator egal cu 235F i
investigai din nou frecvena tensiunii de
ieire. Argumentai de ce frecvena difer
de cazul de simulare.
Tema 7.4 Determinai teoretic solicitarea n
tensiune a diodei D
1
i comparai-o cu cazul
cu punii capacitive. Verificai rspunsul
prin msurarea solicitrii n tensiune a
diodei D
1
, v
D1
.
Tema 7.5 Msurai curentul mediu de
sarcin i comparai-l cu valoarea msurat n cazul punii (Tema 6.5). Comparai forma de
und i
2
cu cazul n punte (Tema 6.7). Msurai valoarea sa de vrf i explicai de ce vrfurile
curentului de intrare sunt mai mari n comparaie cu cazul n punte.
R
94
ro
1
D1
vo
io
D4
D2
D3
~
v2
50V
50Hz
i2
r2
1
C
470F
C
470F
S
Exp 12 P
N
- 13 -
Modulul 1.2
Msurarea circuitelor de curent continuu i a
circuitelor rezonante de curent alternativ
Universitatea Politehnica Timioara
Autori: Dan Lascu
Mircea Bbi
Adrian Popovici
Mihaela Lascu
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n cadrul
programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate de autori nu
reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo responsabilitate din partea
acesteia.
- 14 -
1.2 Msurarea cicuitelor de curent continuu i a
circuitelor rezonante de curent alternativ
Msurarea rezistenei n circuitele de curent continuu.
n laboratorul web al PUT s-a realizat un laborator pentru nvmnt la distan, n cadrul
cruia se pot studia i circuitele de curent continuu.
Legtura la distan cu experimentul este explicat n seciunea experimentelor online
de pe pagina web EDIPE. Pentru a rula experimentele de la distan pentru Msurarea
circuitului de c.c., studentul trebuie s aib instalat pe computerul su personal, pachetul
software LabView Run Time Engine 8.0.1.
La nregistrarea n experiment va aprea SELECTION FRONT PANEL (panoul
frontal de selectare). n setarea iniial de baz, dispozitivele sunt inactive (nu exist
alimentare cu tensiune). Utilizatorul va comuta ntre cele dou panouri frontale:
SELECTION FRONT PANEL i MEASUREMENT FRONT PANEL (panoul frontal de
msurare). Funciile acestor panouri sunt explicate n documentul DC Circuit Measurements
Manual (manualul msurri n circuitele de c.c.).
Teoria i relaiile necesare sunt prezentate n documentul DC Circuit Measurements
Theoretical background (bazele teoretice ale msurtorilor circuitului de c.c.).
Aceiai valoare a rezistorului se va msura prin metodele Upstream (amonte) i
Downstream (aval) i se vor trage concluziile.
Etapele experimentului:
Setul de obiective 1
Rulai experimentul 1: Upstream
Tema 1.1. Citii i scriei valorile indicate de voltmetrul digital (VDC) i de ampermetrul
digital (ADC).
Tema 1.2. Calculai valorile rezistenei Rx1. Neglijai rezistena intern a ampermetrului Ra.
Tema 1.3. Calculai valoarea rezistenei Rx1 dac rezistena intern a ampermetrului este
Ra=0.33.
Tema 1.4. Calculai eroarea absolut sistematic a metodei.
Tema 1.5. Calculai eroarea relativ sistematic a metodei.
Setul de obiective 2
Rulai experimentul 2: Downstream
A
V
R
X2
V
CC
Rv
A
V
R
X1
V
CC
Ra
- 15 -
1.2 Msurarea cicuitelor de curent continuu i a
circuitelor rezonante de curent alternativ
Tema 2.1. Citii i scriei valorile indicate de voltmetrul digital (VDC) i de ampermetrul
digital (ADC).
Tema 2.2. Calculai valoarea rezistenei Rx2. Neglijai rezistena intern a voltmetrului Rv.
Tema 2.3. Calculai valoarea rezistenei Rx2 dac rezistena intern a voltmetrului este
Rv=100M.
Tema 2.4. Calculai eroarea absolut sistematic a metodei.
Tema 2.5. Calculai eroarea relativ sistematic a metodei.
Tema 2.6. Explicai rezultatele experimentale. Explicai de ce apar erori datorate msurrilor
n cazul experimentelor Downstream i Upstream. Explicai care metod este indicat
pentru msurarea rezistenelor n funcie de valoarea acestora.
Setul de obiective 3
Rulai experimentul 3: Bridge (punte)
Tema 3.1. Alegei rezistena Rv=330 (valoarea de baz).
Tema 3.2. Citii i scriei valoare indicat de Zero Indicator (indicatorul de nul).
Tema 3.3. Alegei rezistena Rv=1,8k.
Tema 3.4. Citii i scriei valoare indicat de Zero Indicator.
Tema 3.5. Crui interval i aparine valoarea rezistenei necunoscute? Calculai valoarea
rezistenei necunoscute prin interpolarea liniar dintre indicaiile indicatorului i valorile
rezistorului corespunztor.
Tema 3.6. Alegei rezistena Rv=1,2k.
Tema 3.7. Citii i scriei valoare indicat de Zero Indicator.
Tema 3.8. Explicai de ce apar erori n cazul experimentului Bridge. De ce nu este precis
interpolarea liniar? Specificai n ce situaie interpolarea liniar d rezultate destul de precise.
NI
R
X3
Rv
R R
V
CC
- 16 -
1.2 Msurarea cicuitelor de curent continuu i a
circuitelor rezonante de curent alternativ
Circuitele de c.a. rezonante
n laboratorul web al PUT s-a realizat un laborator pentru nvmnt la distan, n cadrul
cruia se pot studia i circuitele rezonante de curent alternativ.
Legtura la distan cu experimentul este explicat n seciunea experimentelor online
de pe pagina web EDIPE. Pentru a rula experimentele de la distan pentru Msurarea
circuitului de c.c., studentul trebuie s aib instalat pe computerul su personal, pachetul
software LabView Run Time Engine 8.0.1.
La nregistrarea n experiment va aprea fereastra SELECTION FRONT PANEL
(SELECTARE PANOU FRONTAL). La reglajul iniial, de baz, dispozitivele
experimentale sunt inactive (nu exist alimentare cu tensiune). Utilizatorul va comuta ntre
dou panouri frontale: SELECTION FRONT PANEL i MEASUREMENT FRONT
PANEL (PANOUL FRONTAL DE MSURARE). Funciile acestor panouri sunt explicate
n documentul Manual de circuite rezonante de curent alternativ.
Teoria i relaiile necesare sunt prezentate n documentul Bazele teoretice ale circuitelor
de rezonante de curent alternativ.
Etapele experimentului:
Setul de obiective 1
Rulare Experiment 1: Invertor rezonant serie
Tema 1.1. Selectai valoarea de 3.7kHz pentru frecvena tensiunii de comand a porii.
Tema 1.2. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 1.3. Selectai valoarea 7.2kHz pentru frecvena tensiunii de comand a porii.
Tema 1.4. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 1.5. Care este valoarea maxim a curentului prin circuit pentru fiecare dintre
frecvenele alese anterior? Explicai formele de und analizate. Specificai care din cazuri
corespund funcionrii la frecvene mai mici sau mai mari dect frecvena de rezonan.
Comparai formele de und simulate cu cele obinute experimental.
Tema 1.6. Calculai frecvena de rezonan fo a circuitului serie. L=1,2mH i C=640nF.
- 17 -
1.2 Msurarea cicuitelor de curent continuu i a
circuitelor rezonante de curent alternativ
Tema 1.7. Selectai valoarea fo pentru frecvena tensiunii de comand a porii din
experiment.
Tema 1.8. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 1.9. Msurai valoarea maxim a curentului prin circuit la rezonan. Explicai formele
de und analizate. Calculai factorul de calitate Q al circuitului. Comparai valoarea curentului
maxim msurat cu cea teoretic i explicai diferena.
Setul de obiective 2
Rulare experiment 2: Invertor LCC
Tema 2.1. Selectai valoarea de 3.7kHz pentru frecvena tensiunii de comand a porii.
Tema 2.2. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 2.3. Selectai valoarea 7,2kHz pentru frecvena tensiunii de comand a porii.
Tema 2.4. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 2.5. Care este valoarea maxim a curentului prin bobin, pentru fiecare dintre
frecvenele alese? Specificai care din cazuri corespund funcionrii la frecvene mai mici sau
mai mari dect frecvena de rezonan. Comparai formele de und simulate cu cele obinute
experimental. Care este valoarea maxim a curentului prin circuit pentru fiecare dintre
frecvenele alese anterior? Explicai formele de und analizate.
- 18 -
1.2 Msurarea cicuitelor de curent continuu i a
circuitelor rezonante de curent alternativ
Tema 2.6. Calculai frecvena rezonant n circuit deschis f
0
, frecvena de rezonan de
scurtcircuit f
i frecvena f
m
pentru care impedanele capacitive i inductive sunt egale.
L=1,2mH , Cs=640nF i Cp=220nF.
Tema 2.7. Selectai valoarea f
0
pentru frecvena tensiunii de comand a porii.
Tema 2.8. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 2.9. Selectai valoarea f
pentru frecvena tensiunii de comand a porii.
Tema 2.10. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 2.11. Selectai valoarea f
m
pentru frecvena tensiunii de comand a porii.
Tema 2.12. Analizai urmtoarele forme de und afiate:
- tensiunea de comand a porii
- curentul rezonant
- tensiunea de ieire a punii
- spectrul de frecvene al curentului rezonant.
Tema 2.13. Care este valoarea maxim a curentului prin inductor? Explicai formele de und
analizate.
Tema 2.14. Explicai comutaia pentru tranzistoarele i diodele din circuit. Specificai
situaiile n care modul de comutare a tranzistoarelor i diodelor este ZVC sau ZCS.
- 19 -
Modulul 2.1
Electronic de putere
Universitatea de Tehnologie Delft
Autori: Pavol Bauer
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n cadrul
programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate de autori nu
reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo responsabilitate din partea
acesteia.
- 20 -
2.1 Electronic de Putere
Experiment de Electronic de Putere
n sistemul DelftWebLab s-au elaborat dou msurri complexe. Convertorul c.c. c.c. i
demonstraia unui invertor trifazat cu modulaie vectorial, s-au selectat ca fiind cele dou
sisteme de msurat. Acestea sunt cele dou posibiliti de conversie, de baz. Obiectivul
general de nvare l constituie capacitatea de a urmri anumii pai de proiectare ai unui
convertor de putere ntr-un mod bine structurat.
Convertorul c.c. c.c.:
Proiectai un convertor buck cu pulsaia de curent
impus i verificai randamentul su.
Obiectivele experimentului
Obiectivele practice pot fi rezumate prin urmtoarele puncte:
Simulai un proces tipic de proiectare al unui convertor
Indicai structura fizic i construcia unui convertor modern
Demonstrai efectele de comutare ale ntreruptoarelor semiconductoare de putere (de ex. pornirea/ oprirea i
recuperarea invers)
Demonstrai efectele n timp real, ntrzierile n acionare, etc.
Comparai formele de und simulate i msurate. Artai influena elementelor parazite.
Obiectivul general este ndeplinirea urmtoarelor obiective specifice:
nelegerea metodologiei de proiectare structurat
nvarea diferitelor metode de conservare a energiei
nvarea faptului c poziionarea componentelor i cablajul imprimat au anumite reguli (n ipoteza c se cunosc
regulile)
Vezi volumul, cablajul i asociaz-le puterii.
Capabilitatea de a analiza un sistem existent ntr-un mod structurat
Sistemele complexe se divid n subsisteme pentru nivelul funcional
nvarea faptului c simularea (PC) i efectele lumii reale difer i capabilitatea de a nelege diferenele.
Simplificarea simulrii (modelelor) din realitate
Capabilitatea de a selecta un aparat
Programarea microcontrolerului cu un scop specific
nelegerea ntrzierilor n acionare
Cerinele fa de sistem sunt:
Vizualizarea i comanda sistemului real
Trebuie s fie accesibil studenilor
Aspectul de proiectare l constituie proiectarea unui convertor c.c./ c.c. la sarcina dat i ondulaia de curent
impus.
Procesul de proiectare
Principala idee care st la baza experimentului o constituie simularea unui proces de proiectare tipic al unui
convertor de putere. Aspectul de proiectare a identificat deja o parte deosebit de important i este n
contradictoriu cu practica tradiional, unde obiectivul este de a respecta diferitele fenomene.
- 21 -
2.1 Electronic de Putere
Procesul de proiectare se poate caracteriza prin urmtorii pai:
Simularea sistemului dorit
Programarea microcontrolerului pentru a genera impulsurile pentru convertorul de putere
Asamblarea provizorie folosind blocurile constructive disponibile
Msurarea semnalelor reale ale sistemului i rularea ansamblului provizoriu cu un modulator construit individual
(programat)
Comparaia dintre formele de und simulate i msurate cu privire la ntrzieri i efectele n timp real, etc.
Pentru ghidarea prin procesul de proiectare sunt pregtite cinci atribuii diferite.
Determinare
O parte important o constituie determinarea. Obiectivele de nvare sunt verificate prin:
ntrzieri i frecvena de comutare maxim
Pierderi de comutare
Ondulaia curentului obinut
n continuare, se explic panoul frontal al unei msurri c.c.-c.c.
Panoul frontal c.c. c.c.
3
4
5
2
1
12
11
10
16 15 14 13
9
8
7
6
Figura 1.
1) Ajutor pentru codul microcontrolerului (uC)
2) Prin deschiderea acestei ferestre se poate scrie un cod uC pentru tema 2 i tema 5
3) Schema locului de munc (convertoarele c.c. c.c. incluznd sarcinile LR i maina de
c.c.)
- 22 -
2.1 Electronic de Putere
4) Prin deschiderea acestei conexiuni se poate vedea n direct adevratul loc de munc,
folosind o camer web
5) Imaginea fotografic a locului de munc din laborator
6) Rezultatele msurrilor tensiunii de intrare V
1
i de ieire V
2
(valoare medie)
7) Afiarea formei de und (se pot afia simultan pn la patru forme de und diferite).
Pentru a afia o form de und, apsai butoanele corespunztoare TRACE ON/OFF
(pornire/ oprire form de und) (14)
8) Comenzi orizontale (putei modifica afiarea formelor de und prin reglarea scrii i
poziiei lor)
Declanator automat: Declanatorul automat
determin momentul n care osciloscopul
ncepe s achiziioneze date i s afieze o
form de und.
Scara timpului: Cu aceast comand se poate
modifica scara orizontal a tuturor formelor
de und.
Poziia orizontal: Putei ajusta Poziia
Orizontal a declanatorului automat.
9) Citirea indic factorii de scar vertical ai canalelor
10) n fereastra separat care se deschide se poate prezenta o diferen a oricrei forme de
und din cele dou forme de und selectate
11) Calculai puterea instantanee sau pierderile prin multiplicarea a dou forme de und.
Se poate calcula o valoare medie, prin selectarea ferestrei de timp.
12) Parcurgei o transformare FFT a unei forme de und selectate. Intervalul de frecven
depinde de scara selectat a timpului.
13) Comenzile verticale (se poate modifica modul de afiare a formelor de und prin
reglarea scrii i poziiei lor)
CH1, 2,3 & 4: Selecteaz Ch 1, 2, 3 & 4 i modific factorii
verticali ai scrii i poziia formei de und.
Volts/div: Scara vertical a fiecrei forme de und se poate
modifica prin aceast comand.
Poziie: Poziia vertical a fiecrei forme de und se poate
modifica deplasnd-o n sus i jos pe ecran.
14) Afieaz selectarea canalului i pornete i oprete afiarea canalului.
15) LABORATORUL TREBUIE S FIE PREGTIT!!!, n caz contrar, trebuie s
ateptai cteva secunde pn cnd pornete sistemul
16) ATRIBUIILE TREBUIE PARCURSE N SECVENA DAT
- 23 -
2.1 Electronic de Putere
(2) Scriei codul
Prin deschiderea acestei ferestre se poate scrie pentru tema 2 i tema 5 un cod de
microcontroler
Figura 2.
Programarea microcontrolerului
Microcontrolerul trebuie programat astfel nct la un anumit pin de conexiune s fie generat
un semnal de impulsuri cu o lime controlabil a impulsului.
- 24 -
2.1 Electronic de Putere
T12PRL
T12SRL T12SRH
T12PRH
T12clk
Figura 3.
Ajutor: Cum se programeaz un microcontroler
Un registru important n acest C este CCU6_TCTR0L, care iniializeaz timer-ul T12,
folosit pentru generarea impulsurilor.
Frecvena generat este reglat prin modificarea regitrilor de 8 bii CCU6_T12PRL i
CCU6_T12PRH. Prin reglarea acestui registru, se poate regla lungimea perioadei T (reinei
c f=1/T). Frecvena oscilatorului (C) este de 13.3MHz. Valoarea registrului CCU6_T12PR
o constituie numrul impulsurilor ceas ntr-o perioad a semnalului de impulsuri generat.
Urmtorii regitri importani sunt CCU6_CC60SRL i CCU6_CC60SRH. Aceti regitri
regleaz raportul de serviciu al impulsurilor generate. Valoarea permis a acestor regitri este
cuprins de la 0x01 pn la o valoare a registrului CCU6_T12RP. Valoarea CCU6_T12SR
reprezint timpul n care semnalul i modific valoarea din valoarea log.0 n valoarea log.1.
Reinei c toate numerele trebuie s fie n format hexazecimal. Descrierea adiional a C
XC866 este dat n partea "help (ajutor)" de unde putei s i descrcai manualul n PDF al
microcontrolerului.
1. Exemplu: 3kHz i D=0.5
TCTR0L = 0xa0;
CCU6_T12PRL = 0x51;
CCU6_T12PRH = 0x11;
CCU6_CC60SRL = 0xa8;
CCU6_CC60SRH = 0x08
- 25 -
2.1 Electronic de Putere
Figura 4. Impulsurile PWM de la microcontroler.
(10) Diferen
Meniul afieaz diferena a dou forme de und introduse n canalul A i canalul B. Alegei
cte una pentru fiecare din canale, folosind butoanele derulante.
Figura 5. Selectarea canalului pentru meniul difereniat.
Dai clic pe butonul i se extrage diferena dintre cele dou forme de und.
ALEGEI 2 CANALE PENTRU CALCULUL DIFERENEI: CH_A-CH_B
Gndii-v c rspunsul de la server poate s dureze ceva timp (cteva secunde).
- 26 -
2.1 Electronic de Putere
(11) Putere/Pierdere
Acest meniu calculeaz pierderile instantanee la multiplicarea a dou forme de und. Se poate
calcula o valoare medie, selectnd fereastra timp. Reinei c timpii sunt introdui ca
diviziuni!
Figura 6. Afiarea pierderilor.
Pentru a calcula valoarea medie a pierderilor, tiprii la Time1 i Time2 (tiprit sub form de
diviziuni) i apsai butonul i se va afia o valoare medie.
- 27 -
2.1 Electronic de Putere
(12) FFT
Efectueaz transformarea FFT ntr-o form de und selectat. Intervalul de frecven depinde
de Scara Timpului.
Prin folosirea acestui meniu se poate obine FFT al unei forme de und sau FFT al diferenei a
dou forme de und. Selectai un canal din canalul A i dac alegei un alt canal din canalul B
se va afia diferena celor dou forme de und. Dar, dac lsai opiunea de canal B goal, se
va afia FFT a formei de und a canalului.
Figura 7. Selectarea canalelor pentru evaluarea FFT.
Dup alegerea canalelor, dai clic pe i se va afia FFT. Avei rbdare, ntruct rspunsul
de la server va putea dura cteva secunde.
Figura 8. Afiajele FFT.
Tema 1
Problema 1
Simulai convertorul buck cu un program de simulare Caspoc sau orice alt program de
simulare. Adaptai parametri corespunztor urmtorului tabel.
ALEGEI CANALUL(CANALELE) PENTRU CALCULUL FFT.
Gndii-v c rspunsul de la server poate s dureze ceva timp (cteva secunde).
Dac se selecteaz i canalul B, se va compara fft[f(chA)-f2(chB)].
- 28 -
2.1 Electronic de Putere
V
S L
I
u
R 1
C
2
2
C
+
_
+
_
+
_
V
L
i
Figura 9. Convertor c.c. c.c.
V
1
= 50V;
L = 6 mH;
C = 45 F;
R = 25 Ohm;
f
s
= 1 kHz;
D= 0.5.
Simulai sistemul i salvai rezultatul simulrilor, astfel nct ele s se poat compara cu
msurrile.
Figura 10.
ntrebri:
1. Care este valoarea lui R pentru a avea o funcionare la limita de conducie
discontinu? Verificai-o prin simulare.
2. Care este supramodulaia tensiunii (n %) a tensiunii V
2
la convertorul necontrolat
- 29 -
2.1 Electronic de Putere
3. Cderea de tensiune a ntreruptorului, diodei i pierderilor pe alte componente au fost
neglijate pn acum. Determinai la D = 0.5 tensiunea de ieire, dac, cderea de
tensiune pe rezistena inductorului este de 0.5V.
Problema 2
Adaptai parametri convertorului buck fr condensatorul de ieire, pentru a obine
ondulaia curentului de 20% i calculai frecvena de comutaie necesar:
V
1
= 50V;
L = 1 mH;
C = 0 F;
R = 25 Ohm;
f
s
= ? kHz;
Care valoare a ciclului de lucru rezult cu pulsaia cea mai mare?
Tema 2
Pentru a genera impulsurile pentru ntreruptorul IGBT se folosete un microcontroler. Mai nti
modulatorul este realizat astfel nct s fie folosit la generarea semnalului ON/ OFF (pornit/ oprit) al
ntreruptorului. Modulatorul este implementat cu un microcontroler de tipul XC866 care trebuie
programat n acest scop.
Problema 1
Generai impulsuri cu o frecven de 1 kHz i un regim de lucru de 0.5. Scriei codul
microcontrolerului corespunztor observaiilor de mai jos i verificai impulsurile generate.
Problema 2
Concepei un cod de program pentru a obine pulsaia dorit de curent, de 20%, conform
atribuiei 2 i problemei 2.
Programarea microcontrolerului
Microcontrolerul trebuit programat astfel nct la un anumit pin de conexiune s fie generat
un semnal de impulsuri cu o lime controlabil a impulsului. Scriei codul microcontrolerului
i verificai impulsul generat.
- 30 -
2.1 Electronic de Putere
T12PRL
T12SRL T12SRH
T12PRH
T12clk
Figura 11
Ajutor: Cum se programeaz un microcontroler
Un registru important n acest C este CCU6_TCTR0L, care iniializeaz timer-ul T12
folosit la generarea impulsurilor.
Frecvena generat este reglat prin modificarea regitrilor de 8 bii CCU6_T12PRL i
CCU6_T12PRH. Prin reglarea acestui registru, se poate regla lungimea perioadei T (reinei
c f = 1/T). Frecvena oscilatorului (C) este 13.3MHz. Valoarea registrului CCU6_T12PR
reprezint numrul impulsurilor ceasului ntr-o perioad a semnalului impulsului generat.
Urmtorii regitri importani sunt CCU6_CC60SRL i CCU6_CC60SRH. Aceti regitri
regleaz raportul de lucru al impulsurilor generate. Valoarea permis a registrului se situeaz
ntre 0x01 i valoarea registrului CCU6_T12RP. Valoarea lui CCU6_T12SR reprezint
momentul n care semnalul i schimb propria valoare, din valoarea log.0 n log.1.
Reinei c toate numerele trebuie s fie n format hexazecimal. Descrierea adiional a C
XC866 este n partea "help".
- 31 -
2.1 Electronic de Putere
Tema 3
ntrzierile i timpii de comutare
Pornii partea de putere, dnd clic here (aici).
Problema 1
Comparai tensiunile (V
1
& V
2
) i curentul I
2
cu rezultatele simulrii. Msurarea se potrivete
cu simularea:
1. Este atins ondulaia impus de curent;
2. Corespunde raportul tensiunii V
1
i V
2
teoriei (raport de lucru). Explicai diferena.
Problema 2
Luai n considerare comportamentul de comutare, cum sunt ntrzierea i timpii de tranziie
ai ntreruptorului. Care este ntrzierea la acionri i n ntreruptor? Care este timpul de
cretere i coborre ai ntreruptorului folosit IGBT?
- 32 -
2.1 Electronic de Putere
Tema 4
Scopul atribuiei 4 l constituie evaluarea eficienei convertoarelor.
Problema 1
1. Msurai puterea de intrare i de ieire.
2. Evaluai pierderile de comutare. Msurai pierderile de comutare n timpul unui ciclu de
comutare. Folosii n acest scop pentru multiplicare pierderile butonului i fereastra timp. Care
pierderi sunt mai mari, cele de pornire sau de oprire. Elaborai relaia dintre pierderile
msurate i randamentul convertorului.
3. Comparai puterea de intrare i ieire msurat cu pierderile msurate i calculate.
Problema 2
Msurai recuperarea invers a diodei. Care este valoarea curentului de recuperare invers a
vrfului?
Msurai supramodulaia tensiunii n timpul opririi IGBT. Care este valoarea inductanei
parazite n circuit?
- 33 -
2.1 Electronic de Putere
Tema 5
Crearea impulsurilor de diferite forme
Creai o form de und triunghiular a curentului, la diferite frecvene repetitive i ondulaie a
curentului. Se pregtete la write the code (scrie codul) un program scurt care s schimbe
ciclul de lucru cu frecvena de comutare selectat. Programul este marcat cu culoare roie.
Figura 12.
Din primul parametru se poate selecta frecvena de comutaie f
s
. Parametrul raport de lucru d
intervalul de modificare a raportului de lucru. Programul modific ciclic raportul de lucru n
intervalul dat, cu o valoare incremental dat de delta (al treilea parametru de selectat).
- 34 -
2.1 Electronic de Putere
Convertor c.c. c.a.
Obiective specifice de studiu
Demonstrai efectele timpului real;
nvai relaia dintre armonici i frecvena de comutaie;
nvai relaia dintre amplitudinea tensiunii de faz, tensiunii de linie i indicelui de modulaie;
Demonstrai vectorii spaiali;
nvai construcia unui filtru pentru forma de und a PWM AC.
Panoul frontal c.c.-c.a.
1) Deschiderea acestei conexiuni va deschide o nou fereastr care permite alegerea dintre
frecvena fundamental i indexul de modulaie.
2) Schema structural a unui convertor c.c. c.a.
3) Dnd clic pe aceast conexiune se poate observa locul de munc, n laborator fiind
instalat o camer web.
4) Poza structurii.
5) Afiarea scopului (se pot vizualiza pn la trei forme de und simultan. Numrul de afiri
simultane se poate regla verificnd canalele.)
6) Cursorul scrii timpului. Amplitudinea formelor de und se poate controla n funcie de
locaia cursorului.
7) Matricea vectorului de stare se poate afia ntr-o fereastr nou.
8) FFT a diferenei dintre dou forme de und este afiat ntr-o fereastr nou, cnd este
deschis aceast conexiune.
- 35 -
2.1 Electronic de Putere
9) Afieaz diferena a dou forme de und ntr-o fereastr nou.
10) Efectueaz FFT (Fast Fourier Transform (transformata Fourier rapid)) a unui semnal.
Scara timpului determin afiarea intervalelor de frecven. Pentru a vedea frecvene mai
joase n FFT, scara timpului va trebui reglat pe o valoare mai mare. Pentru a vedea
spectrele n jurul frecvenei de comutaie, reglai scara timpului pe valori mai mici.
11) Afieaz selecia canalelor i pornete i oprete selectarea canalelor.
12) Csua de verificare d opiunile referitoare la limitele superioare i inferioare pentru
afiarea scopului.
13) Afieaz starea laboratorului. Este posibil realizarea lucrrii numai dac laboratorul este
gata. S-ar putea s fie nevoie de cteva secunde nainte ca laboratorul s porneasc.
14) Afieaz lista de atribuii.
1) Alegerea semnalului
Aceast fereastr se deschide cnd se realizeaz conexiunea cu semnalul ales. Alegei frecvena
fundamental i indexul de modulaie i atingei butonul de generare.
Figura 13. Generator de semnal.
7) SVM
Acesta este un Vector de Comutare care apare ntr-o fereastr nou. Cifrele corecte duc la un afiaj
hexagonal.
- 36 -
2.1 Electronic de Putere
Figura 14. Vectorul spaial al tensiunii trifazate.
8) FFT (diff)
Calculeaz FFT (Frequency spectrum (spectrul de frecven)) a diferenei dintre cele dou forme
de und selectate. ntr-o astfel de situaie, calculeaz FFT a tensiunilor de linie (PWM).
Figura 15. FFT a diferenei dintre cele dou forme de und selectate.
9) Diferena
Calculeaz diferena a dou unde. Cu alte cuvinte, se determin tensiunile de linie (PWM).
- 37 -
2.1 Electronic de Putere
Figura 16. Diferena a celor dou forme de und selectate.
10) FFT
Afieaz distribuia frecvenei la un semnal de tensiune sau PWM.
Figura 17. FFT a formei de und selectate.
Tema 1
Msurarea unei faze a invertorului trifazic la modulaia vectorului spaiu.
n fereastra cu butonul i meniul derulant "Choose the signal (alegei semnalul) se pot selecta indexul
de modulaie i frecvena formei de und (vezi teoria convertorului c.c.-c.a.). Selectai frecvena de
ieire de 150 Hz i un index de modulaie de 1. Efectuai o transformare FFT a semnalului generat. Fii
atent la selectarea scrii timpului!
- 38 -
2.1 Electronic de Putere
Problema 1. Care este amplitudinea armonicii fundamentale i frecvena de comutaie? Asociai-o
tensiunii conexiunii c.c. (amplitudinea impulsului). Semnalul msurat este un semnal unipolar al porii
IGBT A+ i ca atare conine i o valoare de c.c. Pentru a crete valoarea armonicii fundamentale se
injecteaz armonica a treia. Msurai valoarea armonicii a treia injectate.
Problema 2. Modificai indexul de modulaie pe 0.5 i gsii noua valoare a amplitudinii tensiunii.
Msurai valoarea armonicii fundamentale. Desenai dependena grafic a amplitudinii armonicii
fundamentale de indexul de modulaie.
Problema 3. Modificai indexul de modulaie pe 1.16 i efectuai din nou FFT. La frecvene mai joase,
coninutul armonicii s-a modificat? Adugai punctul cu indexul de modulaie 1.16 la dependena
grafic a amplitudinii armonicii fundamentale n funcie de indexul de modulaie.
Tema 2
Msurarea semnalelor de comand ale invertorului trifazat cu modulaia vectorului spaial.
1. Creai o tensiune de linie folosind diferena butoanelor. Efectuai FFT a tensiunii de linie (pentru a
crea o tensiune de linie folosind diferena butoanelor). Comparai frecvena i amplitudinea armonicii
a treia i armonicilor de comutaie cu FFT a formei de und monofazat.
2. Msurarea vectorului spaial (SVM). Creai un vector spaial al tensiunilor trifazate. Folosii butonul
SVM. Urmrii poziiile vectorilor spaiali.
Tema 3
Filtrarea formelor de und ale invertorului trifazat. n aceast fereastr este posibil modificarea
valorii filtrului.
Valoarea rezistenei filtrului este fix i are valoarea de 20K. Valoarea capacitii filtrului se poate
selecta ntre trei valori 10nF, 50nF i 220nF.
Problema 1: Calculai frecvena de tiere a filtrului conform teoriei (vezi teoria filtrrii Convertoarelor
de c.c. c.a.) cu valorile disponibile ale condensatorului. Selectai indexul de modulaie pe 1 i
frecvena pe 150 Hz. Care valoare a condensatorului i care valoare a filtrului vor pstra vizibil
armonica a treia? Care valoare a filtrului este optim i trebuie selectat ?
Problema 2. Urmrii vectorul spaial folosind butonul SVM. Comparai-l cu vectorul spaial din
atribuia 2.
- 39 -
Modulul 2.2
Corecia Factorului de Putere
Universitatea Politechnica Timisoara
Autori: Dan Lascu
Dan Negoiescu
Mihaela Lascu
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n cadrul
programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate de autori nu
reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo responsabilitate din partea
acesteia.
- 40 -
2.2 Corecia Factorului de Putere
In laboratorul virtual al UPT a fost pregtit un laborator complex legat de tematica
coreciei factorului de putere. Conectarea de la distan la experiment este explicat la
seciunea de experimente online a paginii de web EDIPE. Pentru a rula experimentele de la
distan din cadrul temei Corecia Factorului de Putere, pe calculatorul studentului trebuie
s fie instalat aplicaia LabView Run Time Engine 8.0.1.
Dup rezervarea online a unui experiment va aprea ECRAN MENIU DE
SELECIE. Utilizatorul are posibilitatea de selecie a dou ecrane meniu: ECRAN MENIU
DE SELECIE i ECRAN MENIU DE MSUR. Modul lor de funcionare este explicat
n documentul Manualul coreciei factorului de putere.
Obiectivele experimentelor:
Principiile coreciei active a factorului de putere pentru aplicaii de mic putere utiliznd
convertoare dc-dc care emuleaz n mod natural la intrare la joas frecven o rezisten:
Convertoare dc-dc cu funcionare DCM, modele mediate, alegerea convertorului,
Estimarea rezistenei emulate,
Determinarea valorii medii a tensiunii de ieire i bilanul puterilor,
Solicitrile n curent i tensiune,
Analiza fenomenelor tranzitorii,
Necesitatea unui filtru de radiofrecven la intrare.
Simulrile vor fi efectuate utiliznd pachetul CASPOC. n afara situaiilor cnd
altceva nu este specificat, toate tensiunile sunt raportate la mas. Pentru vizualizarea formelor
de und ale tensiunilor i curenilor pe acelai osciloscop utilizai butoanele de ctig pentru
afiarea curenilor. Pentru fiecare tem, nainte de efectuarea oricrei msurtori trebuie
msurat amplitudinea tensiunii de intrare.
L
50H
R
50
(100)
r
S
0.3
D
1
v
o
i
o
D
3
D
2
D
4
~
v
in 50V
rms
50Hz
i
in
r
in
0.82
v
g
i
g
i
S
L
50H
D
1
C
1
2.2F
C
2
1000F
IR 2110
f
s
D
S
1:1
CONVERTOR
FLYBACK DCM
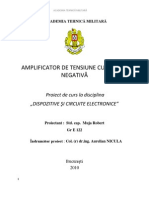
Fig. 1. Circuit de corecie a factorului de putere bazat pe un convertor flyback DCM.
- 41 -
2.2 Corecia Factorului de Putere
Tema 1 Scriei formula general a factorului de putere precum i definiia THD-ului. Se
consider o surs de tensiune avnd o fundamental de 50Hz cu amplitudinea 70V i o
component armonic de ordinul 3 cu amplitudinea 5V nedefazat fa de fundamental.
Curentul absorbit de la aceast surs are o component fundamental de 2A, defazat cu 60
o
fa de fundamentala tensiunii i o component armonic de ordinul 3 de 0,1A fr defazaj
fa de componentele armonice corespondente ale tensiunii. Calculai factorul de putere si
THD-urile tensiunii respectiv curentului. Construii n CASPOC circuitul descris mai sus,
efectuai simularea i comparai rezultatele calculelor teoretice cu cele rezultate n urma
simulrii. Precizai care ar fi formula factorului de putere n situaia n care tensiunea de
alimentare este pur sinusoidal.
Tema 2 Explicai de ce este necesar plasarea unei puni redresoare necomandate n faa
convertorului flyback?
Tema 3 Calculai rezistena emulat a convertorului.
Tema 4 Estimai valoarea medie a tensiunii de ieire presupunnd c tensiunea de pe
capacitatea de ieire are pulsaii vrf la vrf neglijabile. Sfat: utilizai bilanul puterilor.
Tema 5 Pornii experimentul i msurai valoarea tensiunii continue de la ieire. Comparai
valoarea msurat cu cea teoretic determinat la Tema 4 i enumerai cteva motive pentru
care cele dou valori sunt diferite.
Tema 6 Msurai raportul static de conversie n tensiune pentru o valoare constant de 50 a
rezistenei de sarcin. Variai valoarea factorului de umplere al comenzii de la 0,05 la 0,45.
Completai tabelul de mai jos, apoi trasai caracteristica de comand a convertorului flyback,
aceasta fiind dependena dintre raportul
M
o
V
V
i factorul de umplere al comenzii D. Pe acelai
grafic reprezentai i aceeai caracteristic teoretic, apoi verificai ct de mult aceste curbe
coincid.
D 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
teoretic M
o
V
V
masurat M
o
V
V
Tema 7 Estimai valoarea i frecvena pulsaiilor vrf la vrf ale tensiunii de ieire. Stabilii o
corelaie ntre valoarea frecvenei pulsaiilor i valoarea frecvenei tensiunii de intrare.
Dovedii c pulsaia normalizat,
o
o
V
V
, este independent de valoarea factorului de umplere
al comenzii dar este invers proporional cu frecvena de semnalului de intrare respectiv
constanta de timp a sarcinii (RC).
Tema 8 Expandai forma de und a tensiunii de ieire pentru ca pulsaiile vrf la vrf s fie
vizibile. Observai n forma de und pulsaiile de frecven 100Hz. Msurai valoarea vrf la
vrf a pulsaiilor tensiunii de ieire i comparai rezultatul cu valoarea determinat teoretic
anterior la Tema 7.
- 42 -
2.2 Corecia Factorului de Putere
Tema 9 Funcionarea n mod de circuit de corecie a factorului de putere. Avnd o tensiune de
intrare cu amplitudinea 70V i un factor de umplere al comenzii de 0.4 examinai formele de
und ale tensiunii i curentului de intrare n stare staionar. Observai dac ntr-adevr
curentul de intrare are form sinusoidal i este n faz cu tensiunea de intrare. Realizai un
PrintScreen pentru forma de und a curentului de intrare (aceasta va fi utilizat ulterior pentru
comparaie).
Tema 10 Msurai factorul de putere i THD-ul curentului de intrare. Explicai de ce factorul
de putere nu are o valoare aa de ridicat, corelnd aceast valoare cu THD-ul curentului de
intrare. Examinai spectrul curentului de intrare i localizai zonele n care apar preponderent
armonici de frecven ridicat. Facei un PrintScreen al spectrului curentului de intrare (acesta
va fi utilizat ulterior pentru comparaie). Comparai frecvena armonicilor cu frecvena de
comutaie. Modificai valoarea frecvenei de comutaie i observai dac apar modificri ale
valorilor frecvenelor armonicilor superioare.
Tema 11 Examinai forma de und a curentului prin tranzistor dup care expandai-o pentru a
putea observa funcionarea n regim DCM. Care sunt momentele de-a lungul unei perioade a
tensiunii de intrare cnd convertorul ar fi posibil s-i schimbe modul de funcionare din
DCM n CCM?
Tema 12 Elaborai o formul pentru determinarea valorii maxime a inductanei de
magnetizare corespunztoare nfurrii primare, pentru care s se asigure funcionarea n
regim DCM pe ntreaga durat a unei semiperioade a semnalului de la reea. Sfat: considerai
funcionarea n stare staionar i ncercai s extrapolai rezultatul n situaia n care tensiunea
de intrare ar fi o sinusoid lent variabil.
Tema 13 Calculai teoretic valoarea maxim a vrfului de curent prin tranzistor. Afiai forma
de und a curentului prin tranzistor i msurai valoarea sa de vrf maxim dup care
comparai acest rezultat cu cel obinut teoretic.
Tema 14 Determinai teoretic valoarea medie i valoarea efectiv a curentului prin tranzistor.
Afiai forma de und a curentului prin tranzistor i msurai valoarea sa de medie i valoarea
efectiv dup care comparai aceste rezultate cu cele obinute teoretic.
Tema 15 Simularea regimului tranzitoriu de pornire al circuitului PFC. ncercai s gsii o
ecuaie pentru tensiunea de pe capacitatea de ieire (care de fapt este egal cu tensiunea de
intrare) pe durata regimului tranzitoriu de pornire. Utiliznd programul MATLAB sau alt
program reprezentai grafic ecuaia determinat anterior pentru evoluia tranzitorie a tensiunii
de ieire la pornire i comparai graficul obinut cu rezultatul simulrii.
Tema 16 Studiul practic al regimului tranzitoriu de la pornire. Tensiunea de intrare pentru
pornirea convertorului se va aplica exact la trecerea prin zero a tensiunii de reea, convertorul
avnd o sarcin de 50 i un factor de umplere al comenzii constant de valoare 0,45. Pornii
experimentul corespunztor i afiai forma de und a tensiunii de ieire corespunztoare
regimului tranzitoriu de la pornire. Comparai aceast form de und cu cea obinut prin
simulare n CASPOC la Tema 15 i examinai gradul de potrivire al acestora.
Tema 17 Studiul fenomenelor tranzitorii datorate modificrii sarcinii. Considernd
funcionarea convertorului c se realizeaz cu un factor de umplere al comenzii constant de
valoare 0,45, se aplic o variaie treapt a valorii sarcinii de la 50 la 100. Efectuai o
- 43 -
2.2 Corecia Factorului de Putere
simulare a acestui proces. Rulai apoi experimentul corespunztor i afiai forma de und
tranzitorie a tensiunii de ieire. Comparai forma de und din experiment cu cea simulat n
CASPOC i examinai potrivirea acestora.
Tema 18 Necesitatea plasrii la intrare a unui filtru de radiofrecven. Deoarece armonicile
nedorite din spectrul curentului de intrare trebuie rejectate este necesar amplasarea unui filtru
de radiofrecven. Alegei locul de amplasare al acestui filtru: nainte sau dup puntea
redresoare vezi Fig.2. Motivai rspunsul. Sfat: Luai n considerare viteza diodelor i
decidei ce tip de diode ar trebui utilizat pentru punte n fiecare din cele dou situaii.
Tema 19 Proiectarea filtrului de radiofrecven. Nu uitai c mrimea ce trebuie filtrat este
curentul de intrare i nu tensiunea de intrare. ncepei proiectarea avnd n minte cerinele pe
care acest filtru trebuie s le ndeplineasc:
Un ctig redus la frecvena de comutaie pentru ca aceasta mpreun cu multiplii ei s
poat fi eliminate.
Armonicile de frecven dubl fa de frecvena tensiunii de intrare trebuie lsate s
treac fr a fi defazate i atenuate.
Armonicile de nalt frecven din spectrul tensiunii de intrare trebuie s fie mult mai
mici dect armonicile de frecven dubl fa de frecvena tensiunii de alimentare.
Alegei cea mai simpl configuraie de filtru nedisipativ.
Tema 20 Efectuai o simulare cu i fr filtru la intrare observnd cu precdere forma
curentului de intrare. Pornii experimentul n condiiile prezenei filtrului de intrare. Afiai
forma de und a curentului de intrare i comparai-o calitativ cu cea obinut la Tema 9.
Msurai valoarea factorului de putere i THD-ul curentului de intrare i comparai aceste
valori cu cele obinute la Tema 10. Examinai de asemenea spectrul curentului de intrare i
comparai-l cu cel obinut n lipsa filtrului de la intrare la Tema 10. Care este cauza
oscilaiilor de joas frecven ce apar n jurul trecerilor prin zero ale curentului de intrare?
Furnizai o soluie pentru nlturarea acestora.
D
1
D
3
D
2
D
4
~
v
in 50V
rms
50Hz
i
in
r
in
0.82
v
g
i
g
R
F
F
I
L
T
E
R
R
F
F
I
L
T
E
R
Fig. 2. Possible locations for the input radiofrequency filter.
44
Modulul 2.3
Modulaia Impulsurilor n Durat
Universitatea de Tehnologie Warsaw
Autori: Marian P. Kazmierkowski
Bartomiej Kaminski
Dariusz Sobczuk
Krzysztof Rafals
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n cadrul
programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate de autori nu
reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo responsabilitate din partea
acesteia.
- -
2.2 Corecia Factorului de Putere
45
Coninut
1 Obiectivele modulului 2.3 .................................................................................................................. 45
2 Cunotine cerute studenilor ............................................................................................................ 45
3 Fundamentele MID............................................................................................................................. 45
4 Simulri i observaii on-line .......................................................................................................... - 47 -
5 Sistem experimental ...................................................................................................................... - 47 -
6 Experiment la distan ................................................................................................................... - 48 -
7 Exerciii ........................................................................................................................................... - 50 -
8 Bibliografie ............................................................................................. Error! Bookmark not defined.
Obiectivele modulului 2.3
nelegerea fundamentelor modulaiei impulsurilor n durat (MID) pentru convertoare
alimentate n tensiune cu dou, respectiv trei nivele.
Demonstrarea modulaiei sinusoidale a impulsurilor n durat bazat pe purttoare (BP-
SMID)
Demonstrarea BP-MID cu armonica a treia i injecia altor secvene de semnal nule
(SSN)
Demonstrarea modulaiei vectorilor spaiali (MVS), cu amplasarea simetric a vectorilor
nuli
Demonstrarea MSV cu o singur stare nul
nelegerea relaiilor ntre metodele BP-MID i MVS
Cunotine cerute studenilor
Teorie MID (vezi manualul
studenilor versiunea extins)
Circuite i sisteme
Teoria vectorilor spaiali
Electronica semnalelor
Sisteme digitale
Circuite n electronica de putere
LabVIEW
Fundamente ale msurrilor electrice
Fundamente MID
n domeniul convertoarelor electronice de putere dispozitivele semiconductoare sunt
controlate prin metoda ON/OFF (nu exist funcionare n regiunea activ). Momentele
comutrii trebuie calculate pentru fiecare dispozitiv utiliznd o metod special, care s
asigure o relaie strict ntre semnalul de intrare i ieire. Aceasta va conduce la tipuri diferite
de modulaie a impulsurilor n durat (MID), ceea ce reprezint o tehnic de baz a
prelucrrii energiei aplicat n sistemele cu convertoare de putere. Acest curs se axeaz pe
implementarea tehnicii MID la invertoarele trifazate (Fig. 2.a). Tabelul 1 prezint parametrii
de baz, ce caracterizeaz metodele MID.
MID bazat pe purttoare
- 46 -
n MID bazat pe purttoare semnalele de comand pe gril sunt create prin comparaia
ntre semnalul de referin U
ref
i purttoarea triunghiular U
t
(Fig. 1. a). n general
semnalul de referin este sinusoidal, dei este posibil s se extind domeniul linear
prin injectarea unei armonici adiionale de ordinal trei a semnalului secven nul
(SSN) pentru toate cele trei fazele, fr a afecta tensiunile de linie de ieire. n
experiment se regsesc ambele metode de modulaie.
Modulaia vectorilor spaiali
Acest tip de modulaie corespunde reprezentrii vectorilor spaiali ai tensiunilor de
ieire ale convertorului i a tensiunii de referin. (Fig. 1.b). n fiecare sector doi
vectori activi sunt comutai pentru anumite perioade de timp calculate cu ecuaii
trigonometrice iar timpul de eantionare rmas este rezervat vectorilor nuli. Alegerea
vectorilor nuli reprezint un grad de libertate n cadrul acestei metode. Experimentul
permite alegerea a dou metode: MVS cu plasarea simetric a vectorului nul i MVS
cu un vector nul n timpul de eantionare.
Tabelul 1. Parametrii de baz MID.
Numele parametrului Simbol Definiie Observaii
M
M = U
m
/U
(six-step)
=
=U
m
/(2/)U
d
Index (indice) de
modulaie
m m = U
m
/ U
m(t)
Se utilizeaz dou definiii
ale indexului de modulaie.
Pentru modulaie sinusoidal
0M0,785 sau 0m1
M
max
0 ... 0.907
Domeniul maxim linear
m
max
0 ... 1.154
Depinde de forma semnalului
de modulaie
Supramodulaie
max
max
m m
M M
>
>
Domeniul nelinear utilizat
pentru creterea U
out
Frecvena de comutaie
(numr)
f
s
f
s
= f
T
= 1 / T
s
T
s
timpul de eantionare
Constant
Raportului frecvenei de
modulaie
(Numrul impulsurilor)
m
f
1
/ f
s
f
f
m =
Pentru m
f
> 21 se utilizeaz
modulaia asincron
Factor armonic HF
1
/ U
n
U HF =
Se utilizeaz pentru tensiune
i curent
Coeficientul total de
distorsiuni armonice (Total
Harmonic Distortion)
THD % 100 *
2
2
1
1
=
=
n
n
U
U
THD
Se utilizeaz pentru tensiune
i curent
unde: U
m
amplitudinea semnalului de referin, U
(six-step)
amplitudinea componentei fundamentale n
funcionarea n ase pai, U
m(t)
amplitudinea purttoarei semnalului, f
1
frecvena de
referin a semnalului, U
1
amplitudinea fundamentalei, U
n
amplitudinea armonicii de ordinul n.
- -
2.3 Modulaia impulsurilor n Durat
- 47 -
a)
b)
Re
Im
(2/3)U
dc
U
1
(100)
U
2
(110) U
3
(010)
U
4
(011)
U
5
(001) U
6
(101)
U
0
(000)
U
7
(111) (t
1
/T
s
)U
1
(
t
2
/
T
s
)
U
2
U*
U*
max
Fig. 1. a) MID bazat pe purttoare, b) MID cu vectori spaiali.
Simulri on-line i observaii
nainte de rularea experimentelor on-line studenii ar trebui s exerseze toate metodele
MID discutate prin realizarea on-line a simulrilor. Script-urile Java i instruciunile
detaliate pentru rularea simulrilor se regsesc la:
http://www.isep.pw.edu.pl/ICG/english/LeonardoPWM
Sistem experimental
Schema i o imagine a sistemului experimental este artat n Fig. 2. Invertorul
trifazat PWM este conectat la sarcina fix RL (R=10, L=700H) i magistrala de
curent continuu DC (E=40V, C=4000F). Convertorull este comandat prin procesorul
numeric de semnal (PNS), care asigur diferite metode de modulaie i permite
modificri ale parametrilor n timp real, cum ar fi amplitudinea, frecvena de
comutaie etc. Tensiunile i curenii msurai sunt achiziionai prin intermediul unui
osciloscop digital i sunt accesibili de la distan.
a)
b)
Fig. 2. a) Schema montajului experimental i de achiziie, b) Vedere asupra montajului experimental.
- -
2.3 Modulaia impulsurilor n Durat
- 48 -
Experiment la distan
Patru metode MID pentru controlul convertoarelor pe dou nivele sunt implementate
n experimentul de la distan :
Modulaia sinusoidal a impulsurilor n durat bazat pe purttoare (BP-SMID)
Modulaia cu secven de semnal nul a impulsurilor n durat bazat pe
purttoare (BP-MID SSN)
Modulaia vectorilor spaiali (MVS) cu amplasarea simetric a vectorilor nuli
(MSV simetric)
Modulaia vectorilor spaiali (MVS) cu un vector nul n timpul de eantionare
(MVS bifazat)
Operarea Experimentelor la Distan
Pentru rularea experimentelor la distan pe calculatorul personal trebuie s existe
instalate Internet Explorer browser i LabVIEW Run-time Engine. Programele sunt
accesibile n seciunea Experimente Online (http://merisrv2.meri.uni-mb.si/).
Mai nti utilizatorul trebuie s rezerve experimentul la distan fcnd click pe
intervalul orar alocat experimentului din tabelul de rezervri. Cnd accesarea este
valid i dup ce se face click pe sgeata roie de pe panoul utilizatorului pentru
experimente, experimentul selectat va apare n Web browser. n setarea iniial
dispozitivul experimental este activ i convertorul este pornit. Msurrile sunt
sincronizate prin apsarea butonului ACQUIRE (achiziie).
Interfaa utilizator cu experimentul activat este vizualizat n Fig. 3. Va dura cteva
secunde dup activarea experimentului pn cnd semnalele msurate vor fi
vizualizate. Cele mai importante semnale sunt vizualizate sub form grafic pe panoul
osciloscopului (Fig. 3): tensiuni de ieire ale invertorului, curenii de faz de la ieirea
invertorului.
Comutarea ntre diferite metode MID se poate realiza utiliznd Selectorul schemelor
de modulaie (n partea de sus a Fig. 4.a).
Spectrul de frecven al tensiunii msurate i/sau curenilor se poate observa utiliznd
selectorul control Time / Freq (timp/frecven) (Fig. 4 b). n continuare utiliznd
selectorul Time / XY se pot observa locurile geometrice ale vectorilor spaiali de
curent i tensiune. Parametrii importani ai procesului MID (Index de modulaie,
frecvena de ieire fundamental, frecvena de comutaie i timpul mort) pot fi
selectai din panoul PSN (Fig. 4.a).
- -
2.3 Modulaia impulsurilor n Durat
- 49 -
Fig. 3. Interfaa utilizator pe ecranul calculatorului.
a)
b)
Fig. 4. a) PNS panoul frontal, b) panoul frontal pentru achiziii de date (osciloscop).
- -
2.3 Modulaia impulsurilor n Durat
- 50 -
Exerciii i teme
Modulaia sinusoidal a impulsurilor n durat
bazat pe purttoare (BP-SMID)
Se activeaz experimentul la distan i se selecteaz Modulation scheme (schema
de modulaie) (Fig. 4.a) Modulaia sinusoidal a impulsurilor n durat bazat pe
purttoare (BP-SMID).
Se realizeaz urmtoarele observaii i msurri:
a) Selecie: Frecvena fundamental 50Hz; Frecvena de comutaie 8kHz; Timp
mort:1s
Observaie: tensiune uan, ubn; currenii ia, ib n funcie de timp, i funcie de
frecven (spectru) utiliznd selector-ul Time / Freq (timp/frecven) de pe
panoul frontal selector al osciloscopului (Fig. 4.b). Utiliznd selectorul Time /
XY se poate observa locul geometric al vectorilor spaiali de curent i tensiune
pentru o perioad a frecvenei fundamentale. Investigai influena valorii frecvenei
de comutaie asupra tensiunii i formelor de und ale curenilor.
Tema 1: Msurai caracteristica coeficientului total de distorsiuni armonice (THD)
n raport cu indexul de modulaie:
Fixai baza de timp time base 10ms/div (5 perioade ale frecvenei fundamentale
se vor vizualiza pe osciloscop Aceasta este cerina pentru calculul THD). Se
comut prin intermediul selectorului Time/Freq pe frecven Freq i se citete
valoarea THD afiat pe osciloscop.
Tema 2: Se citete spectrul de frecven de pe osciloscop i se calculeaz factorul
armonic pentru a cincea armonic HF
(5)
=I
(5)
/I
(1)
i pentru a aptea armonic
HF
(7)
=I
(7)
/I
(1)
.
Se repet ambele teme pentru diferii indici de modulaie: 0.2; 0.4; 0.6; 0.8; 1.0.
Rezultatele temelor 1 i 2 trebuie nscrise n tabelul 2.
Tabelul 2. Valorile THD msurate i calculul factorilor armonici (FA)
Indice de
modulaie
0.2 0.4 0.6 0.8 1.0
THD [%]
FA(5) [%]
FA(7) [%]
b) S se repete exerciiul i temele de la punctual a pentru frecvena de comutaie de
2kHz.
c) S se repete exerciiile i temele de la punctual a) i b) pentru timpul mort de 4s.
d) Facei comentarii privind influena frecvenei de comutaie, a indexului de
modulaie i a timpului mort asupra coeficientului total de distorsiuni armonice
(THD) i a factorului armonic (FA-HF) pentru componenta de curent de armonic
a 5-a, respectiv a 7-a.
- -
2.3 Modulaia impulsurilor n Durat
- 51 -
Modulaia cu secven de semnal nul a impulsurilor
n durat bazat pe purttoare (BP-MID SSN)
Se activeaz experimentul la distan i se selecteaz Modulation scheme selector
(selectorul schemei de modulaie) (Fig. 4.a) Modulaia cu secven de semnal nul a
impulsurilor n durat bazat pe purttoare (BP-MID SSN). S se realizeze
observaiile i msurrile cu injecia celei de a treia armonic sinusoidal SSN ca la
punctual 7.1. S se realizeze un comentariu privind influena injeciei SSN asupra
spectrului armonic.
Modulaia vectorilor spaiali (MVS) cu amplasarea
simetric a vectorilor nuli (MSV simetric)
Se activeaz experimentul la distan i se selecteaz Modulation scheme selector
(selectorul schemei de modulaie) (Fig. 4.a) Modulaia vectorilor spaiali (MVS) cu
amplasarea simetric a vectorilor nuli (MVS simetric). Se realizeaz observaiile i
msurrile ca la punctul 9.1. Reinei c MVS cu amplasarea simetric a vectorilor
nuli corespunde la BP-MID cu injecie de form triunghiular SSN (25%
amplitudine).
Modulaia vectorilor spaiali (MVS) cu un vector nul
n timpul de eantionare (MSV n dou faze)
Se activeaz experimentul la distan i se selecteaz Modulation scheme selector
(selectorul schemei de modulaie) (Fig. 4.a) Modulaia vectorilor spaiali (MVS) cu un
vector nul n timpul de eantionare (MSV n dou faze). Se realizeaz observaiile i
msurrile ca la punctul 9.1. Reinei c MVS cu vectori nuli n timpul de eantionare
corespunde la BP-MID cu injecie de form dreptunghiular SSN.
Bibliografie
1. M. P. Kazmierkowski, R. Krishnan, F. Blaabjerg (Eds), Control in Power Electronics,
Academic Press, USA, 2002 Chapter 4.
2. N. Mohan, T. M. Undeland, W. P. Robbins, Power Electronics Converters,
Applications and Design, J. Wiley & Sons, Inc., 2003.
- 52 -
Modulul 2.4
Convertor c.c. c.c. pentru sursele de
energie regenerabile i microreele
Institutul Naional Politehnic din Lorraine
Autori: Bernard Davat
Babak Nahid-Mobarakeh
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
2.4 Convertor c.c.-c.c. pentru sursele de energie
regenerabile i microreele
- 53 -
Convertor c.c./c.c. Boost
Obiectul acestui laborator l constituie studiul unui convertor static folosit adesea n aplicaiile
automobilelor. Rolul su este de a crete valoarea medie a tensiunii pentru a adapta tensiunile de ieire
ale surselor de energie regenerabile la cerinele de tensiune ale unei sarcini tipice. De altfel, majoritatea
surselor dau o tensiune de ieire limitat, n timp ce, din motive practice (minimizarea pierderilor i
greutatea) se prefer creterea tensiunii pentru scderea curentului la aceiai putere
(putere=tensiunecurent). Convertorul analizat aici este unul din convertoarele cel mai frecvent folosite
la creterea tensiunii n aplicaiile de putere sczut. Este numit Boost. La terminarea experimentelor
lor studenii ar trebui:
1) s fie capabili s modeleze un convertor Boost;
2) s fie capabili s identifice parametri convertorului;
3) s neleag modul de cretere a tensiunii de ieire a acestui convertor;
4) s aib o idee asupra pierderilor;
5) s cunoasc modul de proiectare al controlerului PI;
6) s fie capabili s explice modul n care comanda mbuntete performanele convertorului.
1. Prezentare
Un convertor Boost este un convertor de putere de c.c./ c.c. cu o tensiune de ieire de c.c. mai mare
dect tensiunea sa de intrare de c.c. Evident, din moment ce puterea (= tensiune x curent) trebuie
conservat, curentul de ieire este mai mic dect sursa de curent. Convertorul Boost face parte din
gama surselor de putere n comutaie fiind format din dou ntreruptoare semiconductoare (o diod i
un tranzistor) i un element de nmagazinare a energiei. Un filtru de ieire, realizat din condensatori
(uneori mpreun cu inductoare), este adesea adugat ieirii convertorului pentru a reduce pulsaia
tensiunii de ieire. Schema circuitului este urmtoarea:
DC
supply
Load
v
i
v
o
L
C
u
Figura 1- Schema convertorului studiat.
Figura 2- Semnalul de comand.
Tensiunea de intrare este furnizat de o surs de tensiune reglabil stabil. Semnalul de comand (u)
este obinut de la un Generator funcional virtual (LabVIEW). Frecvena sa (f
s
= 1/T) este fixat la
5kHz, dar factorul de umplere al comenzii () se poate regla de ctre utilizator. Tensiunea de ieire (v
o
)
variaz n funcie de tensiunea de intrare (v
i
) i factorul de umplere al comenzii () [1]. Pentru
- -
2.4 Convertor c.c.-c.c. pentru sursele de energie
regenerabile i microreele
- 54 -
controlul tensiunii de ieire, ar trebui modelat sistemul i ar trebui identificai parametri. Modelarea i
simularea convertorului Boost este studiat n seciunea urmtoare.
2. Studiul teoretic
Se presupune c toate elementele sunt ideale, tensiunea de intrare (v
i
) fiind constant i sarcina fiind
rezistiv. Semnalul de comand are dou stri: pentru u=1, tranzistorul este nchis (on-state) i la u=0,
el este deschis (off-state). Conform tensiunii i curentului su, dioda poate fi deschis sau nchis. Prin
urmare, avem patru stri distincte. Dar se poate arta uor c atunci cnd tranzistorul este nchis, dioda
este deschis, datorit tensiunii sale pozitive inverse. Prin urmare, exist maxim trei secvene (sau stri)
pentru 0t<T. Ele sunt listate mai jos:
Secvena 1: tranzistor pornit, diod oprit (0t<t
1
=T)
Figura 3- Secvena 1.
Curentul inductorului (i
L
) crete (v
i
>0) i tensiunea de ieire (v
o
) descrete (v
o
>0):
n aceast secven energia este transferat de la sursa de c.c. spre inductor.
Secvena 2: tranzistor oprit, diod pornit (t
1
=Tt<t
2
cu T<t
2
T)
Figura 4- Secvena 2.
Curentul inductorului (i
L
) scade (v
i
<v
o
) i tensiunea de ieire (v
o
) crete:
n aceast secven, se realizeaz un transfer de energie de la inductor la condensator.
- -
2.4 Convertor c.c.-c.c. pentru sursele de energie
regenerabile i microreele
- 55 -
Secvena 3: tranzistor oprit, diod oprit (t
2
t<t
3
=T)
Figura 5- Secvena 3.
Conform cu Fig. 5, curentul inductorului (i
L
) este zero i tensiunea de ieire (v
o
) scade:
Aceast secven apare numai dac curentul prin inductor scade, din secvena 2, avnd suficient timp
ca s se anuleze. Aceasta conduce la o funcionare n "modul discontinuu de conducie" (Fig. 6) ceea ce
nu se dorete n majoritatea aplicaiilor. Pentru a evita acest mod de funcionare, frecvena de comutaie
(f
s
= 1/T) ar trebui s fie suficient de mare astfel nct curentul prin inductor s nu se anuleze nainte ca
t
2
=T. Acest mod, denumit mod de conducie continuu, este prezentat n Fig. 7.
Figura 6- Modul de conducie discontinuu funcionnd cu =0.6.
Figurea7- Modul de conducie continuu funcionnd cu =0.6.
- -
2.4 Convertor c.c.-c.c. pentru sursele de energie
regenerabile i microreele
- 56 -
Presupunnd un mod de conducie continuu i neglijnd rezistenele parazite (conversie c.c./ c.c. fr
pierderi), studenii ar trebui s explice amplitudinea medie a tensiunii de ieire (v
o
=v
C
) n funcie de
tensiunea de alimentare (v
i
) i factorul de umplere al comenzii (). Apoi, aceast funcie de transfer,
numit amplificarea convertorului trebuie verificat prin simulare, folosind MATLAB-Simulink. n
acest scop, trebuie s varieze n intervalul [0 1). Pentru fiecare simulare, studenii traseaz
urmtoarele forme de unde:
- Tensiunea de ieire (v
o
),
- Curentul de ieire (i
o
),
- Tensiunea pe tranzistorului (v
K
),
- Curentul prin diod (i
D
),
- Curentul prin inductor (i
L
).
Parametrii sistemului pentru simulare sunt:
f
s
=5kHz, L=1mH, C=1mF, v
i
=12V
Convertorul este presupus s alimenteze o sarcin rezistiv fix de 50. Apoi, studenii ar trebui s
observe pulsaiile curentului prin inductor i cele ale tensiunii de ieire precum i dependena lor de L,
C, sarcina rezistiv i f
s
.
DC
supply
Load v
i
v
o
L
C
i
L
i
D
i
o
v
K
u
Figura 8- Mrimile msurabile ale sistemului.
Pentru a lua n considerare pierderile prin convertor, se adaug o rezisten serie numit r (Fig. 9).
Apoi, studenii ar trebui redefini tensiunea de ieire ca o funcie de i r. Aceast nou amplificare are
un maxim care trebuie caracterizat integral ca o funcie de parametri de sistem. n final, aceste rezultate
ar trebui verificate prin simulri pentru r=0.5.
Figura 9- Convertor c.c./ c.c. cu pierderi.
3. Studiu experimental
Panoul de comand experimental este prezentat n Fig. 10. Exist trei pri principale: interfaa de
comand, msurtorile i scopul. Este posibil funcionarea convertorului n bucl deschis (OL) sau n
bucl nchis (CL). n prima situaie factorul de umplere al comenzii () este fixat de utilizator. La
comanda cu bucl nchis, exist dou bucle (Fig. 11): o bucl intern de control a curentului prin
inductor (i
L
) i o bucl extern pentru controlul tensiunii de ieire (v
o
=v
C
). Ambele controlerele sunt
Proporional-Integrative (PI) ale cror parametri trebuie fixai de utilizator.
- -
2.4 Convertor c.c.-c.c. pentru sursele de energie
regenerabile i microreele
- 57 -
n continuare se d o descriere a unor funcii importante ale Control Interface (interfeei de
comand):
- butoanele de Start i Stop pentru comanda execuiei programului LabVIEW.
- ntreruptorul OL/CL pentru alegerea funcionrii cu bucl deschis (OL) sau bucl nchis
(CL).
- alpha open-loop (bucla deschis alfa) pentru fixarea factorului de umplere al comenzii (0<1)
n modul OL.
- Reg Vc/Reg IL pentru a alege comanda tensiunii de ieire (v
o
=v
C
) sau a curentului din inductor
(i
L
) n modul CL.
- Alte csue de dialog pentru fixarea punctelor reglate ale variabilelor controlate i parametrilor
controlerului PI.
Not Panoul de comand experimental poate varia de la o sesiune experimental la alta. Pentru
fiecare sesiune el este indicat pe pagina noastr de web.
Figura 10- pupitrul de comand al convertorului de c.c./ c.c..
Figura 11- Schema de comand.
a) Testarea n bucl deschis:
Convertorul poate funciona n bucl deschis (OL) sau bucl nchis (CL). Pentru funcionarea n
bucl deschis, ntreruptorul modului de funcionare ar trebui pus pe poziia OL. ntr-o astfel de
situaie ntreruptorul este sub-luminat rou. Acum suntei pregtii s obinei o amplificare a
convertorului pentru diferite valori ale lui n modul prezentat prin simulrile de mai sus. n acest scop
utilizatorul introduce factorul de umplere al comenzii () de la panou i msoar tensiunea de ieire
Rulare
Scop
Interfaa
de
control
Msurtori
Convertor
de c.c./ c.c.
- -
2.4 Convertor c.c.-c.c. pentru sursele de energie
regenerabile i microreele
- 58 -
(v
o
=v
C
) i curentul n inductor (i
L
) pentru ales. Studiul teoretic, dac este bine pregtit, ar trebui s
permit studenilor s modeleze sistemul i s identifice pierderile sale modelate cu r.
b) Testarea n bucl nchis:
Pentru funcionarea n bucl nchis, ntreruptorul modului de funcionare ar trebui pus pe poziia
CL. ntr-o astfel de situaie, ntreruptorul este sub-luminat albastru.
Exist dou bucle de comand. Studenii ar trebui s nceap cu bucla interioar folosit la controlul
curentului n inductor (i
L
). n acest scop, ntreruptorul modului de comand ar trebui pus pe poziia
Reg IL. Folosind acest studiu teoretic, studenii pot obine funcia de transfer (n sensul modelrii
mediate) ntre i i
L
:
Apoi se va proiecta un controler PI adecvat care s conduc la urmtorii factori de calitate pentru
rspunsul tranzitoriu al curentului n inductor prin bucla nchis:
- eroarea strii de regim staionar nul,
- supramodulaie < 20%
- timpul de cretere < 20ms
Ar trebui reinut c structura controlerului nu poate fi modificat, astfel nct implementarea const
numai n fixarea amplificrii controlerului. Apoi va trebui efectuat un test al rspunsului tranzitoriu
pentru a evalua performanele buclei de comand a curentului. n fig. 12 este prezentat panoul de
comand cu rspunsul tranzitoriu al curentului.
Figura 12- Rspunsul tranzitoriu al curentului n inductor.
Dac se obin performane bune de comand a curentului, studenii pot proiecta bucla de comand
exterioar, prevzut pentru tensiunea de ieire. n acest scop, este nevoie de funcia de transfer
mediat dintre i
L
i v
o
=v
C
folosind rezultatele de la studiul teoretic:
Apoi se va proiecta un alt controler PI. Trebuie efectuat un test al rspunsului tranzitoriu pentru a studia
performanele buclei exterioare.
La sfritul experimentelor, studenii vor trimite prin email rapoartele lor, care trebuie s includ:
- rezultatele studiului teoretic (amplificarea convertorului cu i fr pierderi, schema
programului de simulare i rezultatele simulrii),
- -
2.4 Convertor c.c.-c.c. pentru sursele de energie
regenerabile i microreele
- 59 -
- rezultatele experimentale n bucl deschis (amplificarea convertorului i pierderile
convertorului ca o funcie de ),
- amplificrile controlerelor de curent i tensiune,
- toate msurtorile utile n bucl nchis,
- observaii i concluzii.
Pentru detalii suplimentare cu privire la experimente, vizualizai versiunea integral a manualului de pe
tabl.
- 60 -
Modulul 2.5
Calitatea Puterii i Filtre Active
Universitatea Ruhr din Bochum
Autori: Volker Staudt
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
2.5 Calitatea Puterii i Filtre Active
- 61 -
Cuvnt nainte:
Acesta este un experiment la nivel de sistem. Cunoaterea redresorului trifazat i a
invertorului, a vectorilor spaiali i a modulaiei PWM este imperios recomandat,
de exemplu experimentele 1.1 i 2.3 din PEMCWebLab. Un manual sugestiv este
Power Electronics de Mohan, Undeland and Robbins.
Simulrile utilizeaz programul de simulare CASPOC, v rugm s consultai
www.caspoc.com.
Materiale educaionale:
Acest manual ofer o privire de ansamblu asupra coninutului i a obiectivelor
experimentului i prezint n detaliu modul de utilizare a paginii web de control a
experimentului. Pregtirea pentru efectuarea experimentului este susinut de
materiale educaionale dedicate care trebuie parcurse. Rezultatele procesului de
nvare sunt verificate continuu prin teste on-line. Sunt disponibile urmtoarele
materiale:
1) Un video care prezint partea hardware a electronicii de putere
2) Un set de tutoriale prezentate n PowerPoint
, bazate pe simulri n CASPOC, care
prezint principalele aspectele. Acestea sunt disponibile, la momentul actual, ca
fiiere zip pe care trebuie s le descrcai i s le despachetai. Deschidei fiierul
index.htm n directorul respectiv.
Doar aceste prezentri furnizeaz parolele!
3) O versiune pdf a fiecrui tutorial PowerPoint de referin.
4) Un manual al profesorului care include soluii i parole (pdf protejat). Putei intra
n posesia parolei manualului profesorului trimind un e-mail la edipe@eele.rub.de i
furniznd o declaraie din care s rezulte de ce credei c parolele trebuie s v fie
puse la dispoziie.
Dac totul se termin cu succes, fiecare fiier de prezentare furnizeaz o parol
pentru prezentarea urmtoare i, n final, pentru experiment. Sunt disponibile dou
versiuni ale
experimentului: Staionar sau Dinamic. Versiunea dinamic necesit o pregtire
special furniznd o parol special.
Obiective educaionale:
Studenii nva cum s foloseasc, s interpreteze i s mbunteasc termenii
referitori la calitatea puterii inclusiv cunoaterea avantajelor i a dezavantajelor a
unor definiii. Ei pot aplica metodologia introdus pentru a analiza i ali indici de
calitate a puterii.
Vectorii spaiali sunt definii i utilizai pe parcursul experimentelor contribuind la
creterea gradului de nelegere prin reprezentarea grafic a curenilor i tensiunilor n
sisteme trifazate.
Sunt prezentate avantajele i dezavantajele compensrii active n comparaie cu
compensarea cu elemente pasive, evideniind aspectele economice i practice.
Studenii nva, de asemenea, despre efectele secundare ale compensrii active.
nainte de nceperea experimentului sunt nvate aspecte importante prin
modificarea parametrilor simulrii. n ceea ce privete comportarea staionar, aceasta
este obligatorie pentru toi studenii. Studenii avansai vor modifica i parametrii de
- -
2.5 Calitatea Puterii i Filtre Active
- 62 -
comand n coordonate rotative pentru a nelege nu numai comportamentul staionar
dar i comportarea dinamic a compensatorului folosit n experiment. Ei vor realiza
cum constrngerile de natur economic conduc la o reacie suficient i eficient dar
mai puin performant dinamic a compensatorului utilizat n experiment n comparaie
cu sistemul simulat.
Pentru toi studenii, compararea simulrilor cu rezultatele experimentale conduce
la o nelegere grafic a diferenelor i limitrilor simulrilor datorate idealizrii.
Utilizarea, pentru circuite monofazate i pentru vectorul spaial, reprezentarea n
domeniul timp i pentru circuite monofazate reprezentarea n domeniul frecven
permite analiza rezultatelor i evideniaz avantajele i dezavantajele diferitelor
reprezentri ale rezultatelor msurate.
Detalii despre experiment i simulri:
Fig. 1 prezint schema bloc a experimentului i o poz a acestuia. Dou sarcini,
care pot fi conectate/deconectate separate, sunt conectate n paralel cu compensatorul.
Compensatorul poate fi de asemenea conectat sau deconectat. Aspectele dinamice
(pentru studenii avansai) sunt, de asemenea, cauzate ntotdeauna de
conectarea/deconectarea sarcinii, la fel ca n situaiile practice.
Analysis and
grid
capacitive smoothing
resistive load
grid commutated
converter
Control
IGBT
converter
+
IM
and
with
Induction machine
causing reactive power
(without load)
visualization
Fig. 1: Structura circuitul de test i o vedere a experimentului n laborator.
In cadrul experimentului se analizeaz tensiunea, sarcina i curentul prin
compensator. Sunt disponibile reprezentarea n domeniul timp a tensiunii, a curentului
de linie i a vectorului spaial, reprezentarea n domeniul frecven a tensiunii i
curentului de linie ca i factorul de putere i factorul total de distorsiuni armonice al
sarcinii i al curentului. Pentru o analiz mai detaliat sunt disponibile rezultatele
msurtorilor actuale.
Schema bloc a simulrii folosit pentru experimentul on-line, versiunea valabil
pentru toi studenii, este prezentat n Fig.2. O versiune special care include
controlul n coordonate polare este disponibil pentru studenii avansai. Doar dac
sarcinile predefinite sunt ndeplinite i verificate prin rspunsurile acordate
ntrebrilor incluse n fiierele Adobe Presenter
files, studenii pot continua
experimentul on-line.
- -
2.5 Calitatea Puterii i Filtre Active
- 63 -
n cazul staionar, trebuie calculat tensiunea necesar pentru controlul curentului
compensator prin inductan i surs. Pentru aceasta, se analizeaz coninutul n
armonici al curentului amplitudine i faz - fr compensaie. Prin alegerea corect
a tensiunii compensatoare, acest curent are o valoare redus, apropiat de zero.
Fig. 2: Schema de simulare n regim staionar folosind programul CASPOC
Schema folosit la simulare pentru regimul dinamic permite
conectarea/deconectarea sarcinilor prin acionarea switch-urilor n timpul simulrilor.
Parametrii controllerului care funcioneaz n coordonate polare pot fi modificai; n
acest fel se influeneaz comportarea dinamic a controlului. Fig. 3 prezint structura
contollerului bazat pe vectorul spaial:
i
1
T
t
t T
d
c
I
V
i
'
j
e
(
.
t
'
i
'
| |
e
j90
e
g g
g
) ) t
.
( j
Fig. 3: Schema bloc a contollerului bazat pe vectorul spaial, folosind coordonate
polare
- -
2.5 Calitatea Puterii i Filtre Active
- 64 -
Prin rotirea coordonatelor spre stnga, secvena selectat de armonici se transform
n componente continue i elimin toate celelalte componente printr-un calcul al
valorii medii. Rezultatul este echivalent cu coeficientul asociat al seriei Fourier
complexe. Acest coeficient este forat la o valoare apropiat de zero de un controller
integral. Ieirea acestui controller, rotit cu 90, furnizeaz valoarea set-point-ului
pentru componenta secvenei asociate a tensiunii compensatorului care, n final,
nlocuiete componenta secvenei armonice selectate a sursei de curent.
Cum se pregtete i se utilizeaz acest experiment (vezi, pentru mai multe
detalii, materialul on-line):
Nu efectuai experimentul fr o pregtire adecvat achiziionarea propriilor
parole. n caz contrar rezultatele procesului de nvare vor fi minime i v vei pierde
timpul.
Experimentul funcioneaz cu orice WebBrowser n caz contrar, contactai-ne.
Trebuie s acceptai cookies (pentru aceast sesiune), ele sunt folosite pentru limitarea
numrului curent de utilizatori ai experimentului la exact unul singur.
nainte de accesul la experiment n dreapta sus va apare cmpul n care trebuie
introdus parola de acces, pe care studentul a primit-o dup ce s-a ncheiat
parcurgerea Adobe Presenter
- noiuni de baz. Parola primit, care depinde de
modul de pregtire al studentului, va debloca modul staionar sau modul dinamic. n
Fig. 4 este prezentat pagina web dup deblocarea modului staionar.
n seciunea din dreapta sus se prezint schema echivalent simplificat a
ntregului sistem, inclusiv mrimile msurate i unitatea de achiziie a datelor.
Sistemul este explicat detaliat n materialul educaional.
n seciunea din stnga jos se prezint imaginile recepionate de la una dintre cele
dou camere web. Prin intermediul primei camere web se poate vedea maina de
curent alternativ, astfel nct studentul poate vedea dac axul motorului se rotete sau
nu. Prin intermediul celei de-a doua camere web se poate vizualiza ntregul
experiment. Se poate vedea dac experimentul este pornit (lumina din cabin este de
culoare albastr) sau dac experimentul este oprit. Una dintre cele dou camere web
poate fi selectat prin intermediul celor dou butoane Cam 1 i Cam 2. Selectnd
poziia Off se reduce considerabil traficul de internet.
- -
2.5 Calitatea Puterii i Filtre Active
- 65 -
Fig. 4: Pagina web a experimentului cu opiunile de control i afiare.
Seciunea din dreapta sus conine panoul principal de control i afieaz
permanent timpul rmas din timpul care v-a fost alocat. Prima dat selectai starea
dorit (ON sau OFF) a mainii de inducie (IM), alimentarea sarcinii rezistive a
convertorului (CR) i compensatorul (COMP). De asemenea gsii factorul de putere
(PF) i factorul total de distorsiuni armonice (THD) pentru surs i sarcin. Aceste
mrimi sunt calculate pe baza intervalului de timp pe care l-ai selectat.
Dac avei acces la modul dynamic, atunci putei selecta utilizarea modului
dinamic sau nu pentru IM i CR. Compensatorul are nevoie de cteva secunde pentru
a fi operaional (legtura de curent continuu trebuie s fie ncrcat). Se poate analiza
funcionarea dinamic urmrind reacia la modificarea parametrilor sarcinii. n acest
caz acele componente pentru care a fost selectat modul dinamic vor comuta iniial
ntr-o stare care NU este cea dorit. Apoi, n timp ce se comut n starea dorit sunt
realizate msurrile necesare, inclusiv reacia dinamic. Comanda de comutare pentru
modul dinamic este furnizat n acelai moment pentru toate componentele. Din cauza
timpilor mori ce apar pentru diversele seciuni ale sistemului (de exemplu comutarea
releelor) rspunsul la semnalul de comand poate s nu apar n acelai moment
pentru toate componentele sistemului. Acesta este modul real de funcionare. IM
rspunde cel mai repede i definete momentul de timp zero. n modul staionar
funciile de control pentru modul dinamic sunt inactive, apar gri n cadrul
experimentului.
Seciunea Measure determin durata i ntrzierea msurrilor, unde ntrzierea
este fa de momentul n care s-a dat comanda de comutare a componentelor (ON sau
- -
2.5 Calitatea Puterii i Filtre Active
- 66 -
OFF). ntrzierea poate fi pozitiv sau negativ (-4 ...60) pentru a obine cele mai
bune rezultate.
n modul staionar ntrzierea este forat la 45, deplasnd intervalul de msurare
aproape de comportamentul staionar. Intervalul de msurare poate fi crescut pn la
30 x 20 ms, valoarea minim fiind 20 ms (setare 1).
Sugestii: n modul staionar dac se recomand la nceput valoarea 1 pentru
intervalul de msurare. n modul dinamic, un factor de valoare 0 pentru ntrziere i
20 pentru intervalul de msurare poate fi un bun nceput. nainte de a trece la modul
dinamic trebuie sa nelegei bine modul de lucru staionar. Astfel setai toate funciile
dinamice pe NO i urmai sugestiile si restriciile impuse pentru modul staionar.
Apsnd Do It se vor face msurrile i se vor afia rezultatele n seciunea din
dreapta jos a ecranului. Dac experimentul a fost oprit, va fi pornit automat nainte ca
prima msurare s fie efectuat.
Putei vedea rezultatele n seciunea din dreapta jos. Semnalele de control v permit
s selectai diverse mrimi si moduri de prezentare. Facei o singur selecie ntr-un
anumit moment, deoarece numai acele aspecte asociate butonului Set respectiv sunt
activate, orice alte schimbri nefiind luate n considerare. Putei comuta ntre
reprezentarea n domeniul frecven i n domeniul timp. n ultima csu avei
opiunea Time (pentru axa timpului) i i SV (pentru vectorul spaial). Apsai
butonul set din dreapta pentru a activa selecia fcut. n partea stng putei selecta
mrimile care dorii s le vizualizai. Selectai ce dorii i activai prin intermediul
butonului set din lista mrimilor afiate mai jos.
Un click pe figura va deschide o imagine mare ntr-o nou fereastr. Salvarea
imaginii se poate face prin click butonul din dreapta al mouse-ului. Butonul save data
permite s salvai rezultatele nregistrate pentru o analiz ulterioar. Pentru detalii
vedei materialul educaional on-line.
Cteva sugestii pentru parcurgerea experimentelor i pentru diverse setri n
modurile de lucru staionar i dinamic pot fi gsite n anexe.
V rugm sa observai c n cadrul experimentului numai curentul de sarcin i
curentul furnizat de surs sunt msurate. Curentul prin circuitul de corecie este
calculat ca diferena celor doi cureni msurai. Din acest motiv, curentul calculat
pentru circuitul de corecie reflect de asemenea pierderile de energie ale
componentelor i nu determin modul n care sarcina este uor afectat de erorile de
msurare. Putei vedea aceste efecte n Fig. 4, unde circuitul de corecie este oprit i
curentul prin el este zero. Dac avei probleme cu experimentul v rugm s
transmitei toate problemele la adresa de e-mail :
edipe@eele.rub.de
Anex: Sugestii pentru experimente i setri Modul staionar i modul dinamic
Modul staionar:
ncepei cu IM i CR i setai durata 1. Notai THD i PF pentru surs i sarcin. O
posibil diferen ntre valorile pentru surs i sarcin poate s apar din cauza
- -
2.5 Calitatea Puterii i Filtre Active
- 67 -
erorilor de msurare, sau valorilor diferite de zero ale curentului prin circuitul de
corecie. Curentul prin circuitul de corecie este calculat (nu este msurat) ca i
diferena dintre curentul de sarcin i curentul sursei!. Oprii IM (reducnd curentul
reactiv!). PF se mbuntete (scade curentul reactiv), THD se deterioreaz. Putei
explica de ce?
Acum pornii circuitul de corecie. Comparai din nou sursa i sarcina: PF i THD
se mbuntesc dei curentul sursei arat n continuare distorsionat. Fundamentala
curentului sursei este acum proporional cu tensiunea, aa cum trebuie s fie. Fii
ateni la valorile THD i PF. Notai setrile i rezultatele ntr-un document text i
adugai observaii i comentarii!
Pornii numai CR. Vizualizai reprezentarea vectorului spaial. (Click pe figur
pentru a o mri). ncercai s nelegei forma tensiunii i a curentului. Pornii maina
de curent alternativ i privii din nou. Explicai diferenele! Pornii circuitul de
corecie. Se observ corecia care nu este optim, dar clar mbuntete curentul
sursei. Numai armonicele principale sunt eliminate este o metod cu costuri reduse
ns adesea suficient.
Acum comutai n domeniul frecven. Observai c fundamentalele activ i
reactiv i armonicele curentului sunt ortogonale. Pentru calculul valorii efective s-a
adugat ptratul amplitudinii reducnd o armonic de zece ori se reduce influena sa
asupra valorii efective de aproape 100 de ori! Dei curentul nu arat frumos,
armonicele de ordinul -5, 7, 11 i 13 sunt eliminate aproape total. Curentul reactiv
este eliminat dar datorit ortogonalitii un procent destul de mare din frecvena
fundamental a compensatorului de curent este necesar pentru a reduce cu puin
valoarea efectiv a fundamentalei sursei de curent.
ncercai alte combinaii ale sarcinii i compensatorului explicnd permanent
rezultatele obinute.
Modul dinamic:
n acest mod THD i PF nu sunt att de importante. Ei sunt calculai pe intervalul
de timp afiat i i pierd sensul (cel puin parial) dac variabilele nu sunt n stare
staionar pe intervalul de timp ales. ncepei prin a investiga vizual dinamica mainii
de inducie la pornire (restul oprit, interval msurare 4, ntrziere 1). Curentul iniial
de pornire foarte mare! Aceasta nseamn c exist compensare a curentului? Nu!
Compensatorul este oprit! Aceasta este cauzat de faptul c curentul compensatorului
este calculat ca diferen dintre curentul de sarcin i curentul sursei i traductoarele
pentru curentul sursei sunt mai bune dect cele utilizate pentru curentul de sarcin.
Ele captureaz dinamica mai precis. Dac se ncearc de cteva ori rezultatele n
domeniul timp vor fi diferite (deoarece totdeauna vizualizai mrimile asociate cu L1
). Vizualizai reprezentarea SV pentru a vedea dac este aceeai totdeauna dar cu
vrfuri de curent semnificative ntr-o direcie variabil din planul vectorului spaial.
Examinai acum dinamica sarcinii CR la pornire. Intervalul de msurare 30
(maxim), ntrzierea 4, se afieaz numai iL. S-a neles? Bine! Este comandat n
curent i se ajusteaz valoarea referinei n aproximativ 4 secunde cu o mic
supracretere. ncercai acum s analizai oprirea. Gsii dumneavoastr setrile
adecvate. Rapid nu-i aa?
Comutai circuitul de compensare n poziia acionat i examinai reacia dinamic a
sa la modificri ale sarcinii. (IM on sau off, CR on sau off, ambele on sau off). Vei
- -
2.5 Calitatea Puterii i Filtre Active
- 68 -
observa este necesar aproape o secund pn la atingerea strii staionare. Aceasta
pentru c circuitul de compensare are un pre avantajos. Pentru comanda compensrii
se utilizeaz un procesor
standard dedicat comenzii mainilor de inducie. De aceea numai cteva
componente secveniale pot fi calculate pe o perioad conducnd astfel la un timp
mort mare. Aceasta foreaz o amplificare mic n interiorul comenzii ducnd la o
vitez de reacie mic. Mult mai mic dect n simulare. Cu un procesor mai scump se
pot obine practic aceleai rezultate ca i n simulare. Reinei c circuitul de
compensare are aproape 10 ani i c la acea vreme procesoarele erau mult mai scumpe
i mai puin puternice dect astzi.
- 69 -
Modulul 2.6
Dinamica unei Comenzi de Acionare a
unui Motor Asincron cu Convertor DC/DC
Universitatea Tehnic Naional din Atena
Autori: S. Manias
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
2.6 Dinamica unei Comenzi de Acionare
a unui Motor Asincron cu Convertor
DC/DC
- 70 -
I. SCOPUL E-LAB
Scopul e-laboratorului este s se neleag cum se poate comanda un motor de
inducie prin tehnica de comand scalar V/f. Utiliznd MATLAB/SIMULINK
utilizatorul E-lab i poate genera propriul circuit de comand. De asemenea,
msurrile n timp real cum ar fi tensiunea motorului, curenii motorului, viteza
mecanic a motorului sunt furnizate de ctre sistem mpreun cu cuplul estimat i
fluxul magnetic. Mai mult, prin schimbarea de ctre utilizator a parametrilor de
comand utilizatorul poate acorda algoritmii de comand i se pot observa
modificrile tuturor variabilelor menionate mai sus precum i performanele mainii
de inducie.
II. INTRODUCTION
Motorul de inducie, fa de motoarele cu perii i fr perii de c.c. nu are magnei
permaneni. Rotorul este format dintr-o colivie unde cmpul electric rotitor induce un
flux magnetic. Datorit diferenei de vitez dintre cmpul electric din stator i fluxul
magnetic din rotor, motorul poate s genereze cuplu i rotaie. Figurile 1 i 2 indic o
imagine i principiul mainii de inducie. Privind motorul din punct de vedere electric,
maina de inducie const din ase bobine, trei bobine n stator i trei n rotor.
Analiznd aceste bobine este posibil s se realizeze diagrama electric echivalent
pentru main, reprezentat n figura 3. Aceast echivalen este reprezentat prin
reactane i rezistene, aici X = 2fL . L este inductana i f este frecvena. Bobinele
din rotor i stator interacioneaz ntre ele datorit induciei magnetice comune.
Atunci cnd motorul ncrcat, n regiunea normal de sarcin, frecvena rotorului va
diferi de frecvena creat de
cmpul rotativ creat n stator.
Figura 1. Fotografia unei maini de inducie. Figura 2. Principiul mainii de
inducie i caracteristica cuplu -
vitez de alunecare.
Figura 3. Circuitul echivalent pentru o singur faz a mainii de inducie cu
sarcin i parametrii referii la stator.
- -
2.6 Dinamica unei Comenzi de Acionare
a unui Motor Asincron cu Convertor
DC/DC
- 71 -
Principiul raportului V/f constant este astzi cel mai utilizat metod de comand
n acionrile cu vitez reglabil a mainilor de inducie [1,2]. Multe aplicaii de
comand a motoarelor din viaa real nu necesit performane dinamice ridicate, att
timp ct viteza poate fi modificat eficient n ntreg domeniul. Aceasta permite
utilizarea unui model sinusoidal de stare staionar al motorului de inducie, n care
mrimea fluxului statoric este proporional cu raportul ntre valoarea tensiunii i
frecvenei tensiunii statorului. Dac acest raport este meninut constant, fluxul
statorului va rmne constant i astfel cuplul motorului va depinde doar de frecvena
de alunecare. Figura 4 reprezint diagrama bloc la funcionarea n bucl deschis a
sistemului de acionare cu motor de inducie care folosete tehnica de comad cu
raport V/f constant .
Principiul de comand scalar V/f furnizeaz etajului invertor semnalele necesare
comenzilor pe gril care va genera la ieirea invertorului i n consecin la intrarea
mainii de inducie trifazate un sistem de tensiuni trifazat a crei amplitudine este
proporional cu frecvena. Aceast proporionalitate a tensiunii este artat n figura
5 cu omiterea a ceea ce este sub frecvena boost i peste frecvena nominal. n
practic, panta care definete relaia dintre amplitudinea tensiunii i frecvena
tensiunii se deduce din tensiunea de alimentare terminal nominal i frecvena de
alimentare nominal nscris pe plcua cu numele motorului iar frecvena boost se
alege egal cu un procent (de exemplu 5%) din frecvena nominal. Acest principiu se
poate utiliza pentru construcia unei bucle de control a vitezei (figura 6) n care
diferena ntre viteza dorit i viteza msurat alimenteaz un controller PI care
determin frecvena tensiunii statorului. Pentru a reduce complexitatea controlerului,
intrarea legii V/f i a algoritmului vectorului spaial PWM o reprezint valoarea
absolut a frecvenei tensiunii statorului. Dac ieirea controlerului PI este un numr
negativ, atunci dou dintre variabilele de comutaie care comand tranzistoarele de
putere ale invertorului vor fi interschimbate. Trebuie menionat c principiul de
comand descris aici se poate utiliza doar n aplicaiile unde viteza trebuie meninut
constant oricare ar fi cuplul de sarcin. Aplicaiile unde cuplul de sarcin trebuie
meninut constant, indiferent de viteza motorului necesit msurri ale curentului
statorului i principii de comand mai sofisticate.
CONTROLUL
FRECVENTEI
CONSTANT
V/f
PWM M
3~
V
f
INVERTOR
DC INPUT
Figura 4. Diagram bloc n bucl deschis a unui sistem de acionare cu motor
de inducie care implementeaz tehnica de control cu raport V/f
constant.
- -
2.6 Dinamica unei Comenzi de Acionare
a unui Motor Asincron cu Convertor
DC/DC
- 72 -
Figura 5. Amplitudinea tensiunii statorice n raport cu frecvena statoric din
legea V/f.
Figura 6. Diagrama bloc a tehnicii de control scalare cu raport V/f constant cu
bucl de reacie dup vitez.
Etajul invertor, reprezentat n figura 7, reprezint un etaj de conversie a puterii, care
convertete tensiunea de intrare de c.c. a sistemului de acionare cu motor ntr-o
tensiune trifazat de c.a., n conformitate cu programarea semnalelor de comand
pentru raport V/f constant. Dup cum se poate vedea n figura 7, invertorul const din
ase IGBT-uri de tip n. Dispozitivele semicondutoare de putere conduc astfel nct s
produc la ieirea invertorului formele de und ale tensiunii SPWM.
- -
2.6 Dinamica unei Comenzi de Acionare
a unui Motor Asincron cu Convertor
DC/DC
- 73 -
Figura 7. Etajul invertor al sistemului de acionare cu motor de inducie.
III. MONTAJUL EXPERIMENTAL
Figura 8 prezint montajul experimental care se va folosi cu scopul de a realiza e-
laboratorul. Montajul const dintr-un computer la care se poate conecta utilizatorul
prin Internet i de pe care poate s ruleze un program MATLAB-SIMULINK care
creeaz semnalele de gril ale invertorului sub form digital. n continuare, prin
intermediul unei plci PCI I/O (National Instruments 6025 E) i un circuit logic
semnalele de gril numerice sunt convertite n semnale analogice i acestea sunt
furnizate circuitelor driver ale invertorului.
Figura 8. Montaj experimental cu comanda scalar V/f cu bucl de reacie dup
vitez.
Parameterii montajului
Parametrii mainii de inducie n conexiune Y
Tensiunea nominal de vrf a motorului = 325 Volts
Frecvena nominal a tensiunii motorului = 50 Hz
Puterea nominal (P
n
) =1500 W
Rezistena unei faze a statorului (R
s
) =5
Sw1
Sw4
Sw2
Sw5
Sw3
Sw6
i
a
i
b
i
c
u
o
-u
o
N
a
b
c
MASINA DE
INDUCTIE
- -
2.6 Dinamica unei Comenzi de Acionare
a unui Motor Asincron cu Convertor
DC/DC
- 74 -
Inductana unei faze a statorului (L
ls
) = 0.0091 H
Inductana mutual a unei faze raportat la stator (L
m
) = 0.20
Rezistena unei faze a rotorului raportat la stator (R
r
) = 3.61
Inductana unei faze a rotorului raportat la stator (L
lr
) = 0.0091 H
Numrul polilor magnetici = 2 pairs
Viteza maxim =
Viteza de rotaie electric de sincronism (W
synch
) =100 rad/s
Cuplul (T) = este ajustat de ctre utilizator
Cuplul de inerie al rotorului (J) =0.001 kgm
2
Factorul de frecare () =0 ms
Ali parametrii ai sistemului de acionare cu motor
V/f=6.5
Etajul invertor utilizeaz binecunoscuta tehnic SPWM
Tensiunea de intrare de c.c. a invertorului (V
d
) = 150 Volts cc
IV. PROCEDURA DE EXPERIMENTARE
Se intr pe pagina de web specific E-laboratorului prin intermediul procedurii de
booking. Dup aceea utilizatorul poate vedea la stnga pe pagina web prin intermediul
camerei web montajul experimental, iar la dreapta sunt date toate instruciunile
necesare pentru laborator. n continuare se introduce viteza dorit a motorului de
inducie i dup aceea motorul ncepe s funcioneze. Prin intermediul comenzii de
vitez dat sistemului, utilizatorul poate obine diferite forme de und i estimri care
sunt date de ctre MATLAB/SIMULINK. Pagina web este prezentat mai jos.
- -
2.6 Dinamica unei Comenzi de Acionare
a unui Motor Asincron cu Convertor
DC/DC
- 75 -
1. Fixai viteza mecanic de referin (sau vitezele) i ctigurile pentru
controlerele P i I i pornii sistemul de acionare a mainii de inducie. Dup
funcionarea sistemului, formele de und ale curenilor i tensiunii motorului
vor fi generate de ctre sistem. Mai mult, vor fi furnizate i rezultatele
experimentale pentru fluxul magnetic i viteza mecanic. Pentru ctigurile
selectate se vor putea observa diferitele rspunsuri ale sistemului.
2. Atunci cnd motorul nu funcioneaz, ajustai purttoarea semnalului din
tehnica SPWM. Se pornete motorul i se observ tensiunea i curenii mainii
de inducie.
3. Se oprete sistemul de acionare cu motor i se ajusteaz ctigul controlerului
P la o anumit valoare. Se pornete motorul i se observ efectul controlerului
P n rspunsurile n vitez, cuplu i curent.
4. Se oprete sistemul de acionare cu motor, se ajusteaz ctigul controlerului I
i dup aceea se pornete motorul i se observ efectul controlerului n
rspunsurile n vitez i curent.
5. Se obin diferite forme de und utile i estimri date de MATLAB/SIMULINK
pentru diferite moduri de funcionare ale sistemului.
V. RAPORT
Raportul E-laboratorului trebuie s conin urmtoarele activiti:
1. S se explice avantajele i dezavantajele mainii de inducie cnd se compar
cu o main de c.c.
- -
2.6 Dinamica unei Comenzi de Acionare
a unui Motor Asincron cu Convertor
DC/DC
- 76 -
2. Care sunt avantajele unei maini de inducie acionat de ctre un invertor ?
3. S se discute efectul diferiilor parametri ai controlerului PI n rspunsul
sistemului.
4. Care este scopul utilizrii controlerului P, respectiv I?
5. n caz c sistemul de acionare cu motor utilizeaz n loc de controler PI un
controler PID, care ar fi avantajele care ar putea aprea n plus?
6. Enumerai avantajele i dezavantajele tehnicii de comand V/f .
7. S se prezinte cteva forme de und cheie ale sistemului i s se fac cteva
comentarii pe marginea acestora.
VI. Bibliografie
1. W. Leonhard, Control of electrical drives, 2nd Ed, Springer, 1996.
2. F.A. Toliyat, S.G. Campbell, DSP-based electromechanical motion control, CRC
Press, 2004.
- 77 -
Modulul 3.1
Generator Sincron
Universitatea Tehnic Trencin
Autori:
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
3.1 Generator Sincron
- 78 -
Despre Leonardo da Vinci project
Unul dintre obiectivele acestui proiect Leonardo da Vinci este de a uura studenilor
folosirea laboratoarelor de la distan n domeniul mainilor electrice i electronicii de
putere. Simulrile i experimentele controlate de la distan, alturi de materialul
educaional ataat susin auto-educarea. Astfel, studenii, inginerii neangajai,
incapabili de munc i toi cei care doresc s i mprospteze sau actualizeze
cunotinele pot s fac asta pe propria lor putere i alegnd liber timpul optim pentru
aceasta.
Experimentul se poate realiza pe orice platform cu browser web. Pentru funcionarea
corect se impune acceptarea i instalarea elementelor interschimbabile pentru
msurtorile la distan din LabView. Trebuie acceptate Cookies necesare pentru
limitarea numrului de utilizatori.
Acionri electrice cu motoare sincrone
Motorul/ generatorul sincron reprezint o main de c.c. tipic. Importana ei crete
odat cu dezvoltarea comenzii bazat pe semiconductoare i electronicii de putere. n
viitor, aceste maini vor fi din ce n ce mai frecvent folosite n diferite ramuri
industriale, n special la acionrile dirijate cu cererea sincronizrii poziiei (chimic,
poligrafic, industria textil, etc.). Pe lng acestea, mainile sincrone sunt folosite n
mod obinuit ca motoare pentru acionri n aplicaiile de putere mare. Prin folosirea
sistemelor de comand bazate pe vectorul de frecven, maina sincron este capabil
s ndeplineasc proprietile acionrii curentului direct [2].
Principiul mainii sincrone se bazeaz pe interaciunea cmpului magnetic rotativ
(creat n mod obinuit de nfurarea de c.a. trifazat, amplasat n crestturile
statorului) i cmpul magnetic al rotorului (creat fie de magnei permaneni, fie de
nfurrile alimentate cu curent c.c., resp. prin modificarea simpl a dinilor de fier i
crestturilor de aer ale rotorului). Cuvntul sincron reprezint faptul c viteza
rotorului n trebuie s fie la fel ca viteza cmpului magnetic al statorului:
p
f
n
60
=
unde f este frecvena de alimentare a statorului, p numrul de perechi de poli. Maina
sincron se poate opera fie ca motor, fie ca generator sau ca egalizator, dei modul
optim este dat n mod obinuit n timpul procesului de proiectare al mainii.
Msurtorile generatorului sincron Generatorul sincron cu sarcin izolat
Probleme:
1. Msurai caracteristica de sarcin ) (I f U = a generatorului sincron ncrcat cu
rezistena activ i curentul de excitaie constant: . const I
b
= .
2. Msurai caracteristicile de reglare (de lucru) ) (
Z b
I f I = ale generatorului sincron
ncrcat cu rezisten activ i tensiune de alimentare constant: . const U =
Descrierea locului de munc
- -
3.1 Generator Sincron
- 79 -
O scurt descriere a locului de munc i a laboratorului de la distan este dat n
aceast seciune. Pentru detalii suplimentare, v rugm s vizitai pagina de web a
proiectului (www.PEMCWebLab.com) sau pagina de web a facultii
(www.fm.tnuni.sk).
Schema paginii web pentru problema 1 (msurarea caracteristicii de sarcin) se poate
vedea n fig. 1. Pagina de web pentru problema 2 (msurarea caracteristicii de reglare)
se poate vedea n fig. 2. Paginile de web constau din cinci pri de baz: comanda
convertorului (fig. 8 i fig. 9), comanda rezistenei de sarcin (fig. 7), comanda
tensiunii de alimentare (fig. 6) i tabelul cu rezultate i graficul cu forma de und (fig.
10).
Fig. 1: Schema paginii de web pentru
msurarea caracteristicii de sarcin a
generatorului sincron.
Fig. 2: Schema paginii de web pentru
msurarea caracteristicii de reglare a
generatorului sincron.
Tensiunea msurat se poate vedea pe ampermetru i voltmetru (Fig. 4 i Fig. 3).
Aceste aparate sunt realizate cu un multimetru HPIB prezent n laborator, unde sunt
conectate n bucl dou puncte de msurare.
Fig. 3:
Voltmetru.
Fig. 4:
Ampermetru.
Fig. 5: Adugai i
tergei butoanele
din tabel.
Fig. 6: Sursa de c.a.
controlat.
Fig. 7: Rezistena
controlat.
Comanda tensiunii de excitaie direct este realizat prin reglarea sursei de c.a.
trifazate (redresat nainte de curgerea n nfurarea rotorului). Comanda este
realizat prin micarea butonului rotativ (fig. 6) cu mouse-ul sau prin scrierea simpl a
- -
3.1 Generator Sincron
- 80 -
valorii impuse n fereastra de sub buton. Tensiunea se poate regla n intervalul cuprins
ntre 0 i 380 V (surs de c.a.), care va conduce la valori directe ale tensiunii cuprinse
ntre 0 i 220V (tensiune nominal).
Comanda rezistenei de sarcin (Fig. 7) se bazeaz pe principii similare. Valoarea
sarcinii ncepe la 40 i se termin la 1600 .
Fig. 8: Comanda vitezei. Fig. 9: Comanda cuplului.
Fig. 10: Graficul formei de und
(formele de und pentru
caracteristicile sarcinii i de
reglare).
Maina sincron este acionat de servomotorul asincron. Comanda fie n modul de
acionare (vitezei) sau de frn (cuplului) este realizat de circuitul de comand bazat
pe microprocesor. Butoanele de operare se pot vedea n Fig. 8 i Fig. 9.
Viteza i cuplul se pot controla fie prin modul manual, fie prin cel automat. n modul
manual, pentru creterea parametrilor impui, se pot folosi butoanele >> i >;
respectiv butoanele << i < pentru descretere. Cnd modul automat este activ,
valorile impuse se pot regla cu butonul rotativ.
Ultima parte a msurtorilor se bazeaz pe nregistrarea datelor i curbelor msurate.
Acest lucru se realizeaz ntr-un tabel (fig. 1 i fig. 2) i un grafic. Adugarea i
tergerea (ntregului tabel sau grafic) se poate face de la butoanele Add (adugare)
sau Clear (tergere). Se pot anexa rnduri adiionale n timpul msurtorilor, dup
modificarea schemei msurate. Graficul (Fig. 10, Fig. 1, Fig. 2) se construiete n
acelai timp, automat, punct cu punct.
Not:
n timpul msurtorilor, v rugm s reinei c maina rotativ real este controlat.
Datorit posibilei ntrzieri cauzate de conexiunea de internet, v rugm s avei
rbdare cu rspunsul dat de sistem!
Echipament de msurat i plcua cu numele motorului:
Sistem de acionare servomotor asincron cu sistem de comand a frecvenei i
rezolver (tipul SE2663-6A):
Tensiunea nominal U
n
[V] 390
Viteza nominal n [1/min] 4050
Frecvena f [Hz] 140
Curentul nominal al motorului I
n
[A]
4.4
Puterea nominal P
n
[kW] 1.7
Cuplul nominal M
n
[Nm] 4
- -
3.1 Generator Sincron
- 81 -
Parametri motorului sincron msurat (tipul SE2662-3M):
Tensiunea nominal la Y U
n
[V] 400
Vitez nominal n [1/min] 1500
Frecvena f [Hz] 50
Curentul nominal al motorului I
n
[A]
0.67/0.43
Factorul de putere cos [-] 1/0,80
Puterea nominal P
n
[kW] 0.3
Comanda frecvenei acionrii servo asincrone este realizat cu ajutorul convertorului
de frecven Lentze i a circuitelor cu microcontrolere. Plcuele cu numele ale
aparatului de msurat, rezistorilor, etc. se poate gsi pe pagina de web a facultii
(www.fm.tnuni.sk).
Descrierea msurtorii:
Sarcina pasiv este conectat la conectorii generatorului sincron, constnd din
rezisten, capacitate electric sau inductan, n aceast situaie, se poate spune c
generatorul sincron lucreaz cu sarcin separat. Proprietile generatorului sunt
dependente strict de tipul de sarcin i se poate observa dac maina este ncrcat cu
rezistena, capacitatea i inductana ideal ( R , L , C ).
Viteza generatorului sincron trebuie reglat pe valoarea nominal prin servomotorul
asincron controlat, folosind butoanele <<, <, > i >> (vezi Fig. 8). Generatorul sincron
este ncrcat cu redresor punte cu ase impulsuri, trifazat, cu sarcin rezistiv.
Tensiunea de ieire la generatorul U este msurat, alturi de curentul de ieire
Z
I .
nfurarea de excitaie este alimentat de la sursa de c.c. cu curentul
b
I . Schema de
msurare se poate vedea n Fig. 1 i Fig. 2.
La nceputul msurtorilor, viteza generatorului trebuie reglat folosind butoanele <<,
<, > i >> (vezi Fig. 8). Apoi tensiunea de ieire se va regla n intervalul cuprins ntre
0 i 400 V (valoarea tipic este egal cu tensiunea de ieire nominal). Acest lucru se
poate realiza prin comanda sursei de c.a. redresat (din circuit), de la butonul din fig.
6. Prima valoare a tensiunii de ieire U trebuie msurat cu I
z
= 0 (R
z
reglat pe ).
Valoarea curentului de ieire I
z
se modific prin modificarea valorii impedanei R
z
(Fig. 8). V rugm s reinei c valoarea maxim a lui I
z
nu poate fi mai mare ca cea
nominal (n cazul nostru egal cu 0,430 A)!
Creterea sarcinii la ieirea generatorului, tensiunea de ieire scade cu creterea
curentului de ieire. Caracteristica sarcinii se va obine prim msurarea parametrilor
de ieire, n timp ce curentul de excitaie (i tensiunea) sunt valori constante.
Tensiunea (curentul) de excitaie se pot regla cu butonul din Fig. 6. Modificnd
rezistivitatea sarcinii
Z
R (Fig. 7) modific i curentul de ieire
Z
I . Rezultatele
obinute se pot scrie n Tab. 1.
Tab. 1: Valorile msurate ale caracteristicii sarcinii generatorului sincron.
Z
I
[mA]
U
[V]
- -
3.1 Generator Sincron
- 82 -
cu:
mA I
b
......... = , V U
b
.......... =
Caracteristicile de reglare (de lucru) ale generatorului sincron reprezint dependena
curentului de excitaie
b
I n funcie de curentul de ieire
Z
I ( ) (
Z b
I f I = ), n timp ce
tensiunea de ieire a generatorului este constant. Msurtorile se pot face prin
modificarea sarcinii de ieire (Fig. 7) i modificarea tensiunii de excitaie (Fig. 6).
Parametrii impui se pot scrie, de ex. n Tab. 2.
Tab. 2: Valorile msurate ale caracteristicii de reglare (lucru) a generatorului sincron
Z
I
[mA]
b
I
[mA]
b
U
[V]
cu:
V U .......... =
Procedura de msurare:
Procedura de msurare este similar pentru ambele metode descrise mai sus. Dup
iniializarea msurtorii, primul rnd se poate aduga n tabel (butonul ADD
(adaug)). Acest punct se va folosi ca prim punct al dependenei grafice generate
(Fig. 10).
Pentru caracteristicile de ncrcare, valoarea R
z
(Fig. 7) se modific de ctre studeni.
Curentul i tensiunea de excitaie trebuie pstrate constante cu butonul (Fig. 6).
Pentru caracteristicile de reglare (de lucru), tensiunea de excitaie (fig.6) se modific
de ctre studeni. Apoi, nainte de adugarea rezultatelor n tabel, tensiunea de ieire
U este pstrat constant prin modificarea sarcinii R
z
(Fig. 7).
V rugm s reinei c generatorul sincron este conectat prin conexiunea Y n timpul
msurtorilor.
Referine:
[1] Michalk, J., Buday, J. Elektrick Stroje. ilina: ilinsk univerzita v iline. ISBN
80-8070-568-2,
[2] Leonhard, W. Control of Electrical Drives. Berlin, Heidelberg, New York, Tokio:
Springer Verlag, 1985. ISBN 3-540-13650-9, ISBN 0-387-13650-9.
[3] Halgo, J., Sitr, J. Prehad cvien z predmetov ELEKTROMECHANIKA I.
a ELEKTROMECHANIKA II. Trenn: TnUAD, 2008.
[4] Hrabovcov, V., et al. Merania a Modelovanie Elektrickch Strojov. ilina:
ilinsk univerzita v iline. ISBN 80-8070-229-2.
[5] Mohan, N., Undelad, T., M., Robbins, W., P. Power Electronic Converters,
Applications and Design. [s. l.]: John Wiley & Sons, Inc., 2003. ISBN 0-471-
22693-9, WIE ISBN 0-471-42908-2.
- 83 -
Modulul 3.2
Msurarea Motoarelor de Curent
Continuu
Universitatea de Tehnologie Brno
Autori:
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
3.2 Msurarea Motoarelor de Curent Continuu
- 84 -
Introducere
Scopul principal al prezentului modul l constituie prevederea unor msurtori ale
motoarelor de curent continuu cu excitaie separat.
La folosirea acestui modul se impune ca s fie instalat LabVIEW Run-Time Engine
(versiunea 8.6 cel puin). n timpul sesiunii de conectare s-ar putea ca anumite
programe antivirus s creeze probleme.
Scopurile msurtorilor efectuate ca exerciiu:
1) Msurai viteza n funcie de tensiune n=f(U
a
) cu valorile curentului de excitaie I
b
=0,2
A, I
b
=0,3A, I
b
=0,42A la exersarea legturii ca motor.
2) Efectuai msurarea vitezei i curentului n armturi n funcie de sarcin, la o tensiune
de alimentare constant i o valoare constant a curentului de excitaie, la exersarea
legturii ca motor.
3) Msurai tensiunea electromotoare n funcie de vitez U
a
=f(n) pentru trei valori ale
curentului de excitaie (I
b
=0,2 A, I
b
=0,3A, I
b
=0,42A) la exersarea legturii ca
generator.
4) Msurai tensiunea n armturi n funcie de curentul de sarcin U
a
=f(I
a
) pentru vitez
constant i curent de excitaie constant, la exersarea legturii ca generator.
Procedura de msurare:
Acest laborator va rula n dou moduri de operare de baz: fie ca main de curent
continuu pentru msurarea motorului, fie ca main de curent continuu, pentru
msurtorile efectuate ca generator. Ca main msurat s-a considerat motorul de
curent continuu cu excitaie separat.
Fig. 1. Conexiunile interfeei pentru msurarea unui motor de curent continuu
Legend: 1 panoul de comand i verificare, 2 trei panouri de comand, 3
panoul de afiare a valorilor de msurat, 4 panourile valorilor msurate, 5
panoul de expediere a valorilor msurate.
Interfaa de msurare complet este asigurat prin LabVIEW i este format din mai
multe pri.
Prima parte este panoul de comand i de verificare. Acolo sunt situate o pereche de
ntreruptoare i o lamp cu indicare tripl care semnalizeaz condiiile critice de
lucru n timpul msurtorilor. ntreruptorul marcat Switch On servete la conectarea
la dispozitivele de msurare. Nu este posibil comanda ntregii msurtori fr
3
1
2
5
4
- -
3.2 Msurarea Motoarelor de Curent Continuu
- 85 -
comutarea acestui ntreruptor. ntreruptorul marcat Dynamo (dinam) i Motor
servete la selectarea fie a modului de msurare a motorului, fie a celui de msurare a
generatorului. Lmpile indicatoare evideniaz valorile monitorizate care sunt
depite. Prima lamp indicatoare evideniaz curentul n armtur care depete 8
A. Acest curent este monitorizat ca valoare instantanee, adic vrful nu ar trebui s
ating aceast valoare, n caz contrar motorul se va opri. Cea de doua lamp
indicatoare monitorizeaz viteza care depete valoarea 0,5 A. Dac una dintre valori
este depit, o lamp indicatoare relevant se va aprinde i ntreaga msurare se
anuleaz. ndat ce s-a repornit msurarea (cu ajutorul lui Switch On) s-au resetat
toate proteciile.
Cea de-a doua parte este format din trei panouri de comand care sunt folosite la
setarea valorilor individuale tensiunea armturilor, tensiunea de excitaie i cuplul
motor. Fiecare din aceste componente de comand pot fi pornite de la respectivul
panou. Fiecare valoare se poate seta fie prin scar fie prin scrierea valorii n cmpul
de editare i apsarea butonului Enter, fie prin dou sgei situate n partea din stnga
a cmpului de editare. Valoarea minim a tensiunii de excitaie este setat pe 25 V
cnd exist alimentare cu tensiune de excitaie, deoarece maina msurat poate
funciona i fr excitaie.
Cea de-a treia parte o constituie un panou care afieaz instantaneu valorile procesului
msurat. n timpul msurtorilor efectuate n cazul de acionare a motorului se
afieaz valoarea curentului n armturi, curentului de excitaie, vitezei, puterii de
ieire i de intrare.
Puterea de intrare este calculat cu formula:
a a el
I U P =
, unde P
el
este puterea de intrare a mainii, U
a
este tensiunea prin armtur i I
a
este
curentul prin armtur.
Puterea de ieire este calculat cu formula:
60
2
n
M P
mech
=
, unde P
mech
este puterea de ieire, M este cuplul motor i n este viteza mainii.
Cea de-a patra parte este panoul de afiare a valorilor, panoul grafic i panoul care
cuprinde butonul Save Value (salveaz valoarea) i butonul Reset Value (reseteaz
valoarea). Dac s-au pornit msurtorile (se aprinde lampa indicatoare verde de sub
butonul Switch On) este posibil salvarea i trasarea grafic a tuturor valorilor setate
i msurate, prin apsarea butonului Save Value. Este posibil afiarea simultan a
cinci grafice curentul armturii n funcie de cuplu I
a
=f(M), viteza n funcie de
cuplu n=f(M) i curentul n funcie de timp I
a
=f(t). Dac se impune ndeprtarea
tuturor datelor msurate din tabel i din grafic, acest lucru se poate realiza cu ajutorul
butonului Reset Value.
Ultima parte (cea de-a cincia) este un panou care expediaz valorile prin e-mail. Este
deosebit de important ca n cmpul de editare a Recipients (destinatarilor) s se
treac o adres de e-mail unde va ajunge fiierul cu valorile. Dac valorile trebuie
expediate la mai muli destinatari e-mail, ei se pot aduga cu ajutorul sgeilor situate
n stnga cmpului Recipients. Apoi, va trebui completat cmpul cu subiectul e-
mailului. Dup aceasta, se apas pe butonul Send (expediere). De la adresa de e-mail
edipe@feec.vutbr.cz se va trimite e-mailului destinatar un fiier cu extensia numelui
de fiier lvm. Acest fiier conine datele msurate care sunt mprite n aceleai
coloane ca n tabel (n partea Description (descriere) este descris care valoare este
scris n care coloan).
- -
3.2 Msurarea Motoarelor de Curent Continuu
- 86 -
Aa cum s-a menionat la nceputul acestui capitol, este posibil ca la laborator s se
efectueze ca exerciiu msurarea unui generator. Interfaa de msurare difer n trei
pri de cea de la msurarea motorului.
Fig. 2. Conectarea interfeei pentru msurarea generatorului de curent continuu.
Prima diferen o constituie faptul c exist trei panouri de comand. n timpul
msurrii generatorului este posibil setarea vitezei, tensiunii de excitaie i
rezistenei de sarcin.
Cea de-a doua diferen o constituie panoul de afiare a valorilor. La msurarea
modului de generator se afieaz curentul n armturi, curentul de excitaie, cuplul,
puterea de ieire i de intrare i tensiunea armturii.
Puterea de intrare este calculat cu formula:
60
2
n
M P
mech
=
, unde P
mech
puterea de intrare a mainii, M este cuplul de sarcin i n viteza mainii
Puterea de ieire este calculat cu formula:
a a el
I U P =
, unde P
el
este puterea de ieire a mainii, U
a
este tensiunea de la reea n armturi
(armature power voltage) i I
a
este curentul n armturi.
Ultima diferen o constituie panoul grafic unde se afieaz curentul n funcie de
tensiune U
a
=f(I
a
) i tensiunea n funcie de vitez U
a
=f(n).
Aranjarea n form de tabel a valorilor mainii msurate:
Ca main de msurat s-a ales un motor de curent continuu cu excitaie n derivaie,
care a funcionat ca o main de curent continuu excitat separat.
Tipul mainii Main de curent continuu cu
excitaie n derivaie
Puterea nominal de ieire 1,3 kW
Viteza nominal 1400 min
-1
Tensiunea nominal n armturi 220 V
Curentul nominal n armturi 5,9A
Tipul excitaiei n derivaie
- -
3.2 Msurarea Motoarelor de Curent Continuu
- 87 -
Tensiunea nominal de
excitaie
172 V
Curentul nominal de excitaie 0,42 A
Procedura de msurare:
Msurarea motorului de curent continuu fr sarcin
1. ntreruptoarele Dynamo / Motor trebuie comutate pe poziia Motor.
2. Pornii instrumentele cu ajutorul butonului Switch On.
3. Pornii mai nti alimentarea excitaiei cu ajutorul butonului Switch On de la
controlerul Excitation Voltage (tensiunii de excitaie). Apoi setai curentul
de excitaie impus.
4. Apoi, alimentai armtura cu tensiune, de la butonul Switch On de pe comanda
Armature Voltage (tensiunea armturii).
5. Mrii ncet tensiunea n armturi (nu este permis creterea tensiunii n trepte
exist pericolul creterii iminente a valorii maxime a curentului) pn la
valoarea dorit.
6. Salvai valorile pas cu pas n tabel, cu ajutorul butonului Save Value.
7. Apoi se poate seta alt valoare a curentului de excitaie i se pot repeta
msurtorile.
8. Putei opri msurtorile cu ajutorul butonului Switch On dup terminarea
msurtorilor.
Msurarea motorului de curent continuu n sarcin
1. ntreruptoarele Dynamo/Motor trebuie s se comute pe poziia Motor.
2. Conectai instrumentele cu ajutorul butonului Switch On.
3. Mai nti alimentai excitaia de la controlerul Excitation Voltage, cu ajutorul
butonului Switch On. Apoi reglai curentul de excitaie impus.
4. Dup aceia, alimentai armtura de la butonul Switch On al controlerului
Armature Voltage (tensiunea n armtur) (nu este permis creterea
tensiunii n trepte exist pericolul creterii iminente a valorii maxime a
curentului).
5. Pornii dinamometrul de la butonul Switch On de la controlerul Torque
(cuplu).
6. Reglai pas cu pas valoarea cuplului de sarcin.
7. Salvai valorile pas cu pas n tabel, cu ajutorul butonului Save Value.
8. Putei opri msurtorile cu ajutorul butonului Switch On dup terminarea
msurtorilor.
Msurarea generatorului de curent continuu fr sarcin
1. ntreruptoarele Dynamo/Motor trebuie s se comute pe poziia Dynamo.
2. Conectai instrumentele cu ajutorul butonului Switch On.
3. Mai nti alimentai excitaia de la controlerul Excitation Voltage, cu ajutorul
butonului Switch On. Apoi reglai curentul de excitaie impus.
4. Dup aceia pornii dinamometrul de acionare de la butonul Switch On din
comanda Revolution.
5. Cretei viteza generatorului treptat, pn la valorile dorite.
- -
3.2 Msurarea Motoarelor de Curent Continuu
- 88 -
6. Salvai valorile treptat n tabel, cu ajutorul butonului Save Value.
7. Apoi putei regla o alt valoare a curentului de excitaie i repeta msurtorile.
8. Putei opri msurtorile cu ajutorul butonului Switch On dup terminarea
msurtorilor
Msurarea generatorului de curent continuu n sarcin
1. ntreruptoarele Dynamo/Motor trebuie s se comute pe poziia Dynamo.
2. Conectai instrumentele cu ajutorul butonului Switch On.
3. Mai nti alimentai excitaia de la controlerul Excitation Voltage, cu ajutorul
butonului Switch On. Apoi reglai curentul de excitaie impus.
4. Odat terminat, pornii dinamometrul de acionare de la butonul Switch On de
la comanda Revolution (rotaie).
5. Dup aceia pornii dinamometrul de acionare de la butonul Switch On din
controlerul Torque.
6. Apoi conectai sarcina la controlerul Load cu ajutorul controlerului Switch On
i ncepei creterea sarcinii generatorului.
7. Salvai valorile treptat n tabel, cu ajutorul butonului Save Value.
8. Putei opri msurtorile cu ajutorul butonului Switch On dup terminarea
msurtorilor
- 89 -
Modulul 3.3
Motorul de Curent Continuu
Universitatea Tehnic Trencin
Autori:
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
3.3 Motorul de Curent Continuu
- 90 -
Despre proiectul Leonardo da Vinci
Unul dintre obiectivele acestui proiect Leonardo da Vinci este de a facilita studenilor
utilizarea laboratoarelor pentru nvmnt la distan n domeniul mainilor electrice
i electronicii de putere. Simulrile i experimentele controlate de la distan, alturi
de materialul educaional ataat susin auto-educarea. Astfel, studenii, inginerii, i toi
cei care doresc s i mprospteze sau actualizeze cunotinele .
Experimentul se poate realiza pe orice platform cu browser web. Pentru funcionarea
corect se impune acceptarea i instalarea elementelor interschimbabile pentru
msurrile la distan din LabView. Trebuie acceptate Cookies necesare pentru
limitarea numrului de utilizatori.
Acionri electrice cu motoare de curent continuu
Mainile de curent continuu pot funciona att ca motor, ct i ca generator.
Generatoarele sunt numite, de asemenea, dinam. Conform construciei i
conexiunilor armturilor i nfurrilor de excitaie, aceste maini se pot folosi cu
nfurare simplex wave (serie), excitaie n derivaie (legarea n paralel a
nfurrilor), excitaie independent (separat) i legarea compus a nfurrilor [3,
4]. Msurarea se face n conformitate cu standardele bine cunoscute, valabile ale
rilor UE.
Msurarea parametrilor motoarelor de curent continuu cu excitaie n derivaie
Maina de curent continuu cu excitaie n derivaie este o main de curent continuu
cu legarea n paralel a nfurrilor de excitaie la nfurrile armturii, ca i n fig. 1
i fig. 2. Msurrile se realizeaz dup ce motorul atinge viteza nominal. Se poate
observa c armtura (A
1
, A
2
) este folosit ca surs de putere pentru excitaie. O
recunoatere corect a polilor se impune la conectarea circuitului de pstrare a
polaritii curentului de excitaie I
b
(precum i a polaritii fluxului magnetic de
excitaie) n direcia impus. Fluxul magnetic remanent (tipic pentru mainile
alimentate cu curent continuu) este suficient de puternic pentru a excita maina
conectat n derivaie, dac polii a dou nfurri sunt conectai n sensul corect.
Conectarea greit a nfurrilor conduce de obicei la suprimarea cmpului mainii.
Scopul msurrilor este de a estima cuplul M, turaia n, puterea mecanic a arborelui
motorului P
m
n funcie de curentul de sarcin I
a
la o excitaie constant. Valorile
msurate se pot compara cu valorile obinute de pe plcua cu numele mainii.
Calculul caracteristicii mecanice i curbei de funcionare (vitezei) sunt de asemenea, o
parte component a acestei msurri. Curba de funcionare a motoarelor de curent
continuu cu elemente de derivaie conectate, trebuie msurate n condiii de sarcin,
de 150% din starea nominal ncrcat i starea fr sarcin.
Tem:
3. Msurai motorul de curent continuu cu excitaie n derivaie i estimai
urmtoarele dependine i curbe = f(I), P
1
= f(I), P
2
= f(I), M = f(I), n = f(I)
(semnificaia simbolurilor folosite se va explica n textul de mai jos).
- -
3.3 Motorul de Curent Continuu
- 91 -
Descrierea locului de munc
O scurt descriere a locului de munc i a laboratorului de la distan este prezentat
n aceast seciune. Pentru detalii suplimentare, v rugm s vizitai pagina de web a
proiectului (www.PEMCWebLab.com) sau pagina de web a facultii
(www.fm.tnuni.sk).
Structura paginii web pentru msurarea motoarelor de curent continuu cu excitaie
derivaie se poate vedea n fig. 2. n timpul msurrilor, motorul are sarcin o main
servo asincron controlat de un convertor de frecven. Msurarea este mprit n
cinci seciuni de baz, dup cum urmeaz:
Comanda alimentrii cu putere (convertor), descris n Fig. 8 i Fig. 9,
Comanda rezistenei de sarcin Fig. 7 (nu e folosit la aceast tem)
Comanda alimentrii cu tensiune de curent alternativ redresat Fig. 6,
Graficele formelor de und, corespunztoare tabelului cu rezultate Fig. 10,
Folosirea diagramei bloc la msurarea tensiunii i curentului - Fig. 3 i Fig. 4 [1, 2, 5].
Fig. 1: Pagina web pentru msurarea
generatorului de curent continuu cu
excitaie n derivaie.
Fig. 2: Pagina web pentru msurarea
motorului de curent continuu cu excitaie
n derivaie.
Mrimile msurate se poate vedea la ampermetru i voltmetru (Fig. 4 i Fig. 3).
Aceste aparate sunt implementate cu un multimetru HPIB prezent n laborator, unde
sunt conectate n bucl dou puncte de msurare.
Fig. 3:
Voltmetru.
Fig. 4:
Ampermetru.
Fig. 5: Butoanele de
adugare i tergere
tabel.
Fig. 6: Surs de c.a.
controlat.
Fig. 7: Rezisten
controlat.
- -
3.3 Motorul de Curent Continuu
- 92 -
Comanda tensiunii de excitaie direct este realizat prin reglarea sursei de curent
alternativ trifazat (redresat naintea alimentrii nfurrilor rotorice). Comanda este
realizat prin deplasarea butonului rotativ (fig. 6) cu mouse-ul sau prin scrierea simpl
a valorii impuse n fereastr, exact sub buton. Tensiunea poate fi reglat n intervalul
de la 0 la 380 V (surs de curent alternativ), care va conduce la valori de tensiune
continu cuprinse ntre 0 i 220 V (tensiune nominal).
Fig. 8: Comanda vitezei. Fig. 9: Comanda cuplului.
Fig. 10: Graficul formei de und
(formele de und ale caracteristicii
de sarcin i reglare).
Maina sincron este acionat de servomotoare asincrone. Comanda fie n modul de
acionare (vitez), fie de frn (cuplu) se realizeaz cu un circuit de comand bazat pe
microprocesor. Butoanele de operare se pot vedea n fig. 8 i fig. 9.
Viteza i cuplul se pot controla n modul manual, sau cel automat. n modul manual,
pentru creterea parametrilor impui, se pot folosi butoanele >> i >; respectiv,
butoanele << i < pentru micorarea lor. Cnd modul automat este activ, valorile
impuse se pot regla cu butonul rotativ.
Ultima parte a msurrilor se bazeaz pe nregistrarea datelor. Aceasta se face printr-
un tabel (fig. 1 i fig. 2) i un grafic. Adugarea i tergerea (ntregului tabel sau
graficului) se poate face cu butoanele ADD sau CLEAR. Rndurile adiionale se
pot anexa n timpul msurrilor, dup modificarea schemei msurate. Graficul (Fig.
10, Fig. 1, Fig. 2) este construit n acelai timp automat, punct cu punct.
Not:
n timpul msurrilor, v rugm s reinei c maina rotativ real este
comandat. Datorit posibilelor ntrzieri datorate de conexiunea internet, v
rugm s avei rbdare cu rspunsul dat de sistem!
Echipamentul de msurat i plcua cu numele motoarelor:
Sistem de acionare servomotor asincron cu sistem de comand a frecvenei i
rezolver (tipul SE2663-6A):
Tensiunea nominal U
n
[V] 390
Viteza nominal n [1/min] 4050
Frecvena f [Hz] 140
Curentul nominal al motorului I
n
[A]
4.4
Puterea nominal P
n
[kW] 1.7
Cuplul nominal M
n
[Nm] 4
- -
3.3 Motorul de Curent Continuu
- 93 -
Parametri motorului de curent continuu msurat, cu excitaie derivaie (tipul SE2662-
3A VDE 0530):
Tensiunea nominal la U
n
[V] 220
Vitez nominal n [1/min] 2000
Curent nominal n stator I
n
[A] 1.4
Putere nominal P
n
[kW] 0.25
Comanda frecvenei acionrii servo este realizat cu ajutorul convertorului de
frecven Lentze i a circuitelor cu microcontrolere. Plcuele cu numele ale
aparatului de msurat, rezistoarelor, etc. se poate gsi pe pagina de web a facultii
(www.fm.tnuni.sk).
Descrierea i procedura msurtorilor:
Iniial e nevoie s se ating valoarea aproximativ a turaiei nominale a motorului de
curent continuu Acest lucru se poate face prin comanda acionrii servo (Fig. 8).
Intervalul impus este ntre 1950 i 2050 rpm. Motorul de curent continuu se poate
acum conecta la sursa de alimentare cu tensiune prin creterea tensiunii de alimentare
(Fig. 6). Valoarea tensiunii de alimentare nu poate fi mai mare ca 220 V (DC). Servo
asincron funcioneaz acum ca o sarcin a motorului de curent continuu Prin controlul
servo de la butoanele << (modificare rapid) sau < (modificare lent) se poate regla
cuplul de sarcin impus. Valorile puterii electrice P
1
, puterii mecanice P
2
i
randamentului sunt calculate automat n timpul msurtorilor, conform valorilor
tensiunii, curentului, cuplului i vitezei.
Bibliografie:
[6] Michalk, J., Buday, J. Elektrick Stroje. ilina: ilinsk univerzita v iline. ISBN
80-8070-568-2,
[7] Leonhard, W. Control of Electrical Drives. Berlin, Heidelberg, New York, Tokio:
Springer Verlag, 1985. ISBN 3-540-13650-9, ISBN 0-387-13650-9.
[8] Halgo, J., Sitr, J. Prehad cvien z predmetov ELEKTROMECHANIKA I.
a ELEKTROMECHANIKA II. Trenn: TnUAD, 2008.
[9] Hrabovcov, V., et al. Merania a Modelovanie Elektrickch Strojov. ilina:
ilinsk univerzita v iline. ISBN 80-8070-229-2.
[10] Mohan, N., Undelad, T., M., Robbins, W., P. Power Electronic Converters,
Applications and Design. [s. l.]: John Wiley & Sons, Inc., 2003. ISBN 0-471-
22693-9, WIE ISBN 0-471-42908-2.
- 94 -
Modulul 3.4
Motorul Asincron
Universitatea Tehnic Trencin
Autori:
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
3.4 Motorul Asincron
- 95 -
Despre Leonardo da Vinci project
Unul dintre obiectivele acestui proiect Leonardo da Vinci este de a facilita studenilor
utilizarea laboratoarelor pentru nvmnt la distan n domeniul mainilor electrice
i electronicii de putere. Simulrile i experimentele controlate de la distan, alturi
de materialul educaional ataat susin auto-educarea. Astfel, studenii, inginerii, i toi
cei care doresc s i mprospteze sau actualizeze cunotinele .
Experimentul se poate realiza pe orice platform cu browser web. Pentru funcionarea
corect se impune acceptarea i instalarea elementelor interschimbabile pentru
msurrile la distan din LabView. Trebuie acceptate Cookies necesare pentru
limitarea numrului de utilizatori.
Acionri electrice cu motoare asincrone
Motoarele asincrone (denumite i motoare de inducie) sunt cele mai rspndite
motoare de acionare electric. La sfritul secolului al 19-lea apariia sa a reprezentat
un impuls puternic pentru trecerea din curent continuu n curent alternativ n domeniul
generrii, transmisiei i distribuiei energiei electrice. Principalul avantaj l constituie
eliminarea tuturor contactelor electrice n micare, conducnd la o construcie
deosebit de simpl i de robust. Mainile de inducie sunt produse ntr-o mare
varietate de modele, cu puteri nominale de la civa wai la puteri de ordinul
megawailor.
Acest tip de main este printre cele mai frecvent folosite. Acest fapt se datoreaz n
principal dezvoltrii rapide a convertoarelor de frecven bazate pe comutatoare
statice.
Msurarea parametrilor motorului asincron
Caracteristicile mecanice (n teoria mainilor sincrone denumite i caracteristicile
cuplului) sunt definite ca dependena dintre cuplul electromagnetic i alunecarea s,
respectiv de turaia n. Cuplul real al arborelui motor este redus de pierderile cuplului
cauzate de pierderile mecanice i o parte a pierderilor adiionale. Mrimea acestor
caracteristici depinde de tipul nfurrilor n colivie, tehnologiei de producie, etc. La
motoarele cu rotor bobinat cu inele de contact, aceasta depinde i de proprietile
(rezistena) starterului. Caracteristicile cuplului se pot obine dup cum urmeaz:
Msurri statice modificarea cuplului de frnare M
br
, dac cuplul de accelerare M
a
este egal cu zero. Caracteristicile cuplului static sunt definite prin M = f(n) n starea
staionar.
Msurri dinamice prin modificarea cuplului de accelerare M
a
cnd cuplul de
frnare M
br
este egal cu zero. Acesta se poate msura n timpul pornirii motorului
alimentat de la o surs independent de tensiune. n mod obinuit, se bazeaz pe o
msurare a cuplului sau a derivatei acceleraiei.
Precizia msurrilor este influenat de recalcularea cantitilor msurate sau
modificarea rezistenei nfurrilor n timpul funcionrii motorului. Determinarea
caracteristicilor cuplului cu precizie ridicat este una dintre cele mai complicate
msurri ale parametrilor mainii asincrone.
- -
3.4 Motorul Asincron
- 96 -
Teme:
Estimai caracteristicile cuplului la motorul asincron M = f(n) cu:
1. motor n conexiune delta la U = U
n
i U = U
n
,
2. motor n conexiune Y la U = U
n
i U = U
n
.
Descrierea locului de munc
O scurt descriere a locului de munc i a laboratorului de la distan este dat n
aceast seciune. Pentru detalii suplimentare, v rugm s vizitai pagina de web a
proiectului (www.PEMCWebLab.com) sau pagina de web a facultii
(www.fm.tnuni.sk).
Schema de msurare de baz se poate vedea n Fig. 1. Msurrile se realizeaz pentru
dou tipuri de conexiuni ale nfurrilor statorice (fig. 2). Prima este conexiunea
delta, cea de-a doua conexiunea Y. Msurarea este mprit n cinci pri de baz,
dup cum urmeaz:
Comanda alimentrii cu tensiune (convertor), descris n Fig. 8 i Fig. 9,
ntreruptor ntre conexiunea nfurrii statorice (conexiunea delta conexiunea Y)
Fig. 7,
Comanda alimentrii cu tensiune alternativ Fig. 6,
Realizarea graficului formei de und corespunztor tabelului cu rezultate Fig. 10,
Folosirea diagramei bloc cu msurarea tensiunii i curentului - Fig. 3 i Fig. 4 [1, 2,
5].
a) b)
Fig. 1. Pagina web pentru msurarea
caracteristicilor cuplului la motorul
asincron
Fig. 2. Conexiunile nfurrilor
statorice
Mrimile msurate se poate vedea pe ampermetru i voltmetru (Fig. 4 i Fig. 3).
Aceste aparate sunt implementate cu un multimetru HPIB prezent n laborator, unde
sunt conectate n bucl dou puncte de msurare.
- -
3.4 Motorul Asincron
- 97 -
Fig. 3:
Voltmetru.
Fig. 4: Amper
metru.
Fig. 5: Butoane
de adugare i
tergere a
tabelului.
Fig. 6: Surs de c.a.
controlat.
Fig. 7:
Comutarea ntre
conexiunea delta
i Y a nfurrii
statorice.
Comanda tensiunii de alimentare este realizat cu butonul rotativ pe panoul de
comand web sau prin scrierea simpl a valorilor impuse n csua de sub buton.
Tensiunea se poate regla ntr-un interval cuprins ntre 0 i 380 V. Comutarea
conexiunilor nfurrii statorice este realizat cu relee de putere ridicat cu
microcontroler.
Fig. 8: Comanda vitezei
convertorului de
frecven.
Fig. 9: Comanda cuplului
convertorului de
frecven.
Fig. 10: Graficul formei de
und (formele de und ale
caracteristicilor de sarcin i
de reglare).
Comanda modului de Drive/Brake (acionare/ frn) a motorului servo cu convertorul
de frecven este realizat printr-un bloc prezentat n Fig. 8 i Fig. 9. Att viteza, ct i
cuplul se pot controla prin modul manual sau automat.
V rog s folosii butoanele <<, <, > i >> n modul manual pentru modificarea lent sau
rapid a vitezei (fig. 8) sau a cuplului (fig. 9). Dup activarea modului automat se pot
folosi butoanele rotative pentru a regla valorile impuse.
Ultima parte a experimentului o constituie interpretarea datele msurate. Acest lucru
se realizeaz printr-un tabel (fig. 1) i un grafic. Adugarea sau tergerea rndurilor
individuale (sau a ntregului tabel) se poate face folosind comanda ADD (adaug) i
CLEAR (terge) (fig. 5). Adugarea de rnduri se poate face n timpul msurrilor,
dup fiecare modificare a valorilor de intrare (i ieire). Datele salvate sunt prezentate
n grafic (Fig. 1, Fig. 2 i Fig. 10) punct cu punct.
Not important:
n timpul msurrilor, v rugm s reinei c maina rotativ real este
comandat i acionat. Datorit posibilelor ntrzieri cauzate, de ex., de
conexiunea internet, v rugm s avei rbdare cu rspunsul dat de sistem!
- -
3.4 Motorul Asincron
- 98 -
Echipamentul de msurat i plcua cu numele motoarelor:
Sistem de acionare servomotor asincron cu sistem de comand a frecvenei i
rezolver (tipul SE2663-6A):
Tensiunea nominal U
n
[V] 390
Viteza nominal n [1/min] 4050
Frecvena f [Hz] 140
Curentul nominal al motorului I
n
[A]
4.4
Puterea nominal P
n
[kW] 1.7
Cuplul nominal M
n
[Nm] 4
Parametri motorului asincron msurat (tipul SE2662-3H):
Tensiunea nominal la D/Y U
n
[V] 230/400
Vitez nominal n [1/min] 2800
Frecvena f [Hz] 50
Curentul nominal al motorului I
n
D/Y [A]
1.65/0.95
Factorul de putere cos [-] 0,80
Puterea nominal P
n
[kW] 0.37
Controlul acionrii servo asincrone este realizat cu ajutorul convertorului de
frecven Lentze i a circuitelor cu microcontrolere. Plcuele cu numele ale
aparatului de msurat, rezistoarelor, etc. se poate gsi pe pagina de web a facultii
(www.fm.tnuni.sk).
Descrierea procedurilor de msurare:
Msurarea caracteristicii cuplului motorului asincron este realizat pentru dou
conexiuni ale nfurrilor statorice conexiunea delta i Y. nainte de nceperea
msurrilor, utilizatorul trebuie s regleze conexiunea corect (Fig. 7).
Not:
Tensiunea de alimentare trebuie s fie zero (oprit) la comutarea ntre conexiuni!
Tab. 1: Valorile msurate ale conexiunii delta pentru U = U
n
= 230V
M
[Nm]
n
[min
-1
]
Prima msuraare se realizeaz cu nfurarea statorului n conexiune delta. Msurarea
trebuie fcut la tensiunea de alimentare nominal U = U
n
= 230V. Tensiunea se poate
controla cu ajutorul butonului sursei de c.a. (Fig. 6). Dup atingerea valorii impuse a
tensiunii de alimentare, primul punct (valabil pentru motorul asincron n condiii de
sarcin zero) se poate aduga n tabel folosind butonul ADD (Fig. 5). Urmtorul pas
const n ncrcarea motorului asincron cu servomotorul conectat. Acest lucru se
poate face de la butoanele prezentate n Fig. 9, unde semnificaia lui < i a lui >
depinde de direcia de rotaie a rotorului. n timpul msurrilor, v rugm s urmrii
valoarea curentului statoric (Fig. 4) nu poate fi mai mare ca I
n
= 1.65 A la
- -
3.4 Motorul Asincron
- 99 -
conexiunea delta (vezi plcua cu numele motorului). Dup fiecare modificare a
sarcinii data msurat se poate nregistra ntr-un tabel folosind butonul ADD.
tergerea tabelului i graficului se poate face de la butonul CLEAR (Fig. 5).
Tab. 2: Valorile msurate ale conexiunii delta pentru U = U
n
~ 60V
M
[Nm]
M
prep
[Nm]
n
[min
-
1
]
Pentru c (datorit valorii mari a curentului n stator) nu este posibil msurarea
caracteristicii complete a cuplului cnd motorul este alimentat cu tensiunea nominal,
este necesar reducerea valorii tensiunii de alimentare. Acest lucru se poate realiza de
la butonul AC source (sursa de c.a.) (Fig 6). Valoarea recomandat este U = 60 V.
Aceast scdere a tensiunii de alimentare se poate face cnd cuplul este resetat (Fig.
9) pe zero (starea fr sarcin).
Din nou, dup atingerea valorii impuse a tensiunii de alimentare, primul punct se
poate nregistra n tabel folosind butonul ADD (Fig. 5). Urmtorul pas este la
ncrcarea motorului asincron cu servomotorul conectat. Acest lucru se poate face cu
butoanele prezentate n Fig. 8 (controlul turaiei!!!), unde semnificaia < i > depinde
de direcia de rotaie a rotorului. n timpul msurrilor, v rugm s urmrii valoarea
curentului n stator (Fig. 4) nu poate depi 1.65 A la conexiunea delta (vezi plcua
cu numele motorului). Dup fiecare modificare a sarcinii se pot nregistra datele
folosind butonul ADD. tergerea tabelului i graficului se poate face de la butonul
CLEAR (Fig. 5). Valorile obinute se pot recalcula cu tensiunea nominal
corespunztor urmtoarelor ecuaii:
2
4 / 1
=
n
n
prep
U
U
M M (1)
Pentru msurarea motorului cu conexiunea Y se folosete aceiai procedur descris
mai sus. Reinei c la conexiunea Y limitele pentru curent i tensiune sunt diferite -
U
n
= 400 V i I
n
=0.95 A.
Bibliografie:
[11] Michalk, J., Buday, J. Elektrick Stroje. ilina: ilinsk univerzita v iline.
ISBN 80-8070-568-2,
[12] Leonhard, W. Control of Electrical Drives. Berlin, Heidelberg, New York,
Tokio: Springer Verlag, 1985. ISBN 3-540-13650-9, ISBN 0-387-13650-9.
[13] Halgo, J., Sitr, J. Prehad cvien z predmetov ELEKTROMECHANIKA I.
a ELEKTROMECHANIKA II. Trenn: TnUAD, 2008.
[14] Hrabovcov, V., et al. Merania a Modelovanie Elektrickch Strojov. ilina:
ilinsk univerzita v iline. ISBN 80-8070-229-2.
[15] Mohan, N., Undelad, T., M., Robbins, W., P. Power Electronic Converters,
Applications and Design. [s. l.]: John Wiley & Sons, Inc., 2003. ISBN 0-471-
22693-9, WIE ISBN 0-471-42908-2.
- 100 -
Modulul 4.1
Elementele de Baz ale Teleroboticii
bazat pe Internet
BMGE Budapesta
Autori: Istvan Nagy
Peter Korondi
Gabor Sziebig
Rafael Jardan
Mate Farkas
Andras Kecskes
Csaba Kiss
Bela Takarics
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 101 -
Scopul acestei msurri
Prin aceste msurri utilizatorul poate nva comanda acionrii servo i robotului
dat de la un computer. Mai nti utilizatorul se familiarizeaz cu comunicarea ntre
computer i acionarea servo, ca i component important a robotului mobil. n
continuare, se studiaz sistemul ncorporat al unui robot mobil.
Vom folosi un convertor digital analogic pentru a trimite informaii de la computer
la acionarea servo, deoarece semnalele de referin sunt semnale de tensiune
analogice la majoritatea acionrilor servo. Micarea motorului este msurat cu un
codor, care transmite trenul de impulsuri la computer. Un numrtor numr
impulsurile codorului i computerul poate citi valoarea codorului, dnd astfel
informaii cu privire la poziia motorului. Viteza motorului este calculat din
informaiile actuale i anterioare ale poziiei. Aceast metod conduce la un semnal de
vitez foarte zgomotos. Msurtoarea folosete un filtru de timp discret care reduce
acest zgomot de msurare. Utilizatorul poate nva modalitatea de scriere i reglare a
controlerului PI pentru aceast acionare servo simpl. n continuare, se studiaz
sistemul ncorporat al robotului mobil, incluznd circuitul virtual, senzorul de lumin
i distan. n final, utilizatorul va putea scrie un program care va mica robotul dar
care - dac vede un obstacol - va ncerca s-l evite.
Utilizatorul nu trebuie s fie expert n programarea computerelor, dar trebuie s
cunoasc fundamentele. Utilizatorul va scrie un program foarte simplu n C i Visual
Basic. Sunt prezentate exemple i se consider c utilizatorul poate efectua aceast
msurtoare chiar dac aceasta va fi primul su program n C sau Visual Basic.
Exemplele sunt accesibile pe urmtoarea pagin de web:
http://dind.get.bme.hu/experiment/
Liniile directoare generale ale experimentelor
Orice exerciiu poate fi accesat de pe prima pagin a adresei experimentale. Ordinea
exerciiilor este definit astfel nct s ajute utilizatorul la crearea lor pe baza
rezultatelor exerciiilor anterioare. Structura primei pagini se poate vedea n Fig. 1.
Figura 1: Structura primei pagini
Pentru a ajunge la un exerciiu, acesta se selecteaz din meniu sau din lista care
coboar, n modul prezentat n fig. 2.
Figura 2: Selectarea exerciiului
Dup ce se citesc instruciunile exerciiului i fiierele, sursele ajuttoare adiionale,
disponibile, n fiierele specificate se pot scrie comenzile programului pentru fiecare
component de sistem. Limbajul de programare este C++ i se pot introduce
variabilele i codul n dou cmpuri de introducere diferite, n modul vzut n Fig. 3.
Figura 3: Introducerea soluiei
Pentru executarea experimentului dai clic pe butonul Upload (descrcare), situat n
partea inferioar a primei pagini.
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 102 -
Comanda servomotorului de c.c. prin internet
Mai nti utilizatorii necesit experien n comanda cu ajutorul PC-ului a sistemelor
electrice i n particular a acionrii electrice de c.c. (Fig. 4).
Figura 4: Structura sistemului
Exerciiul 1: Folosirea cartelei PCI-1720 D/A
Aceast cartel permite trimiterea anumitor tensiuni specificate de la PC la sistemul
de msurare. Cartela are o interfa de programare (o DLL, Dynamic-Link Library),
care se poate apela prin limbajul C++. DLL este deja ncrcat; trebuie implementat
numai funcia de apelare.
Cartela este fabricat de Advantech Inc. i are un cod PCI-1720. Are 4 canale de ieire
ale convertoarelor D/A cu un interval de ieire cuprins ntre -5V i +5V. Sarcina
dumneavoastr este de a iniializa cartela i de a seta intervalul tensiunii de ieire al
canalului D/A al cartelei, la 3 pn la 5 Volt. De fapt, aceti 5 Volt permit
funcionarea acionrii servo.
Paii necesari:
Iniializarea cartelei (vezi pasul 3 n programul dat ca exemplu)
Setai tensiunea (de ieire) (vezi pasul 4 n programul dat ca exemplu)
Program dat ca exemplu pentru operaiile cu cartelei PCI-1720
Not: Numele parametrilor folosii n acest exemplu sunt diferite de numele folosite la
msurarea actual. Putei s tiai i s mutai pri ale acestui exemplu.
Exerciiul 2: Folosirea ceasului n timp real cu ajutorul
cartelei PCI 1720 D/A
Cea de-a doua funcie important n msurtorile bazate pe PC o constituie
eantionarea. Din acest motiv avem nevoie de un tact n timp real care poate iniializa
eantionarea la un moment specificat i la o frecven dat. Exist mai multe sisteme
de operare n timp real care includ un ceas n timp real pentru sincronizare. Sistemul
de operare Windows de tip multitasking nu suport aplicaiile n timp real, dar
extensia n timp real (RTX) pentru comanda Windows rezolv aceast problem.
Putei citi o descriere pe ea dar nu trebuie s nelegei funcionarea sa integral pentru
aceast msurare. Aplicaia cu ceas n timp real este testat n exerciiul 2.
n programul dat n exerciiu tactul este de o milisecund i sarcina dumneavoastr
este de a scoate la ieire o funcie sinusoidal tensiune-timp (amplitudinea de 3 Volt i
frecvena de 1 Hz), cu ajutorul cartelei PCI 1720 D/A.
Trebuie s definii relaia dintre timpul de eantionare i unda sinusoidal. Timpul de
eantionare ncepe de la 0 i se poate atinge prin variabila CurrentTime (curent timp)
dat n program. Aceast variabil de timp se poate atinge prin variabila
time_array[tickCount] i valoarea este dat n uniti de 100 nanosecunde.
Paii necesari:
Studiai programul cadru dat
Introducei codurile lips
o Declarai parametri i variabilele
o Out=Amplitude * sin (omega*time) (Not: nu este un cod C i trebuie s citii
time (timpul) cu ajutorul funciei TimerHandler)
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 103 -
Exerciiul 3: Folosirea cartelei contor PCI-1784
Contorul este folosit la citirea semnalului codorului i la convertirea sa ntr-o
reprezentare numeric. Valoarea contorului este citit cu funcia TimerHandler,
executat la fiecare btaie a ceasului de timp real.
Sarcina dumneavoastr este de a citi valoarea contorului la canalul 3 pe cartela PCI-
1784.
Paii necesari:
Iniializai cartela
Resetai valorile contorului
ncepei operaia de contorizare
Citii valoarea contorului la nceput
Citii valoarea contorului la fiecare btaie a ceasului de timp real.
Exerciiul 4: Msurri n bucl deschis
n acest exerciiu se fac msurri n Bucl Deschis cu ajutorul motorului de c.c. V
rog s studiai n literatura de specialitate motorul de c.c. pentru care se d o vedere de
ansamblu mai jos, n capitolul curent intitulat Bazele teoretice ale servomotorului de
c.c.. La prima sarcin, cuplul electric este mrit de la ResultData.Torque = 0 mNm la
cuplul maxim al motorului (ResultData.Torque = 5 mNm). Astfel, se pot obine
rspunsurile pas cu pas ale motorului, la diferite modificri de tipul semnalelor
cuplului. Fiierele cu rezultatele, care se pot descrca la sfritul msurrilor, se pot
evalua n Matlab. Pentru aceasta exist deja un program scris, care prin rularea
programului, traseaz diagramele vitez - timp a arborelui, tensiune - timp i poziie -
timp. Aceste diagrame se pot salva, de asemenea, n format jpg pentru o documentare
ulterioar.
Funcia de timp a vitezei este foarte zgomotoas. Din semnalul zgomotos se poate
obine o curb lin prin filtrul trece jos, dup cum urmeaz:
measured
) 1 (
measured c
) 2 (
measured
2
c
) 3 (
measured
3
c filtered
T 3 T 3 T + + + =
unde T
c
este perioada de timp a frecvenei de ntrerupere i (i) este scurt pentru
derivata i n funcie de timp.
Exerciiul 5: Msurarea n bucl nchis
n continuare, se studiaz diferite tipuri de controlere. Se structureaz n acest
exerciiu mai nti P, apoi PI i n final controlerul de vitez PID, pentru motorul de
c.c.
Paii:
Studiai n literatur teoria comenzilor, dat ca vedere de ansamblu, mai jos, n
capitolul intitulat Bazele teoretice ale teoriei comenzii
Structurai controlerele (P, PI, PID, etc.)
Fiierele cu rezultatul, care se pot descrca la sfritul msurtorilor, se poate evalua
n Matlab. Exist deja un program scris pentru asta, care traseaz diagramele vitez
timp arbore, tensiune timp i poziie timp. Aceste diagrame se pot salva n format
jpg pentru documentarea ulterioar.
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 104 -
Sistemul ncorporat al unui robot mobil
Familiarizai-v cu posibilitile programrii orientate pe obiecte ale unui sistem
embedded real prin exemple simple. Msurrile se bazeaz pe manualul robotului
Rogue de pe www.roguerobotics.com.
Bazele teoretice
Sisteme embedded
Un sistem ncorporat este un sistem computerizat special proiectat s presteze una sau
mai multe funciuni delicate, adesea cu restriciile calcului n timp real. De obicei, este
ncorporat ca parte component a unui dispozitiv complet, incluznd prile hardware
i mecanice. Contrar, un computer prevzut pentru scopuri generale, cum ar fi un
computer personal, poate ndeplini multe sarcini diferite, n funcie de programare.
Din moment ce sistemul ncorporat este dedicat sarcinilor specifice, inginerii
proiectani pot s-l optimizeze, s-i reduc mrimile i costul produsului, sau s-i
mreasc fiabilitatea i performanele.
Despre robot
OOBoard (placa OO) este creierul central al robotului. Cuprinde un microcontroler
OOPIC pe mijloc, precum i diferite I/O, interfee i porturi de extensie. n fig. 5. sunt
scoase n eviden principalele caracteristici ale plcii.
Figura 5: Principalele caracteristici ale plcii
Fig. 6. Prezint partea extins a plcii, unde se pot forma diferitele aranjamente ale
senzorilor.
Figura 6: Placa de senzori
Toate coloanele verticale indicate cu albastru i rou sunt conectate electric la toate
cele 5 guri din fiecare coloan (roie sau albastr). NU sunt conectate la coloane
adiacente; aici folosii fire de untare dac dorii conectarea a dou coloane.
Mai exist i anumite elemente I/ O ncastrate n plac (vezi fig. 7).
Figura 7: Elemente ncastrate n plac
OOPIC
OOPIC este un acronim pentru: PIC orientat asupra obiectului. PIC este o familie din
categoria microcontrolerelor din arhitectura Harvard realizat de Microchip
Technology, dedus din PIC1640 dezvoltat de General Instrument's Microelectronics
Division. Numele PIC se refer la "Programmable Intelligent Computer (computer
inteligent programabil". Numele de firm OOPIC definete numeroase obiecte
ncastrate, care furnizeaz metode i proprieti la comand special. Obiectele pot fi
dosare pentru hardware, cum ar fi senzorii externi fotografici sau LED-urile.
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 105 -
Programarea orientat asupra obiectelor
Programarea orientat asupra obiectelor (OOP) este o paradigm de programare care
folosete obiecte i interaciunile lor n aplicaiile de proiectare i programele
computerizate. Obiectele conin o combinaie de date i de instruciuni care opereaz
asupra datelor, fcnd obiectele capabile s primeasc mesaje, s proceseze date i s
trimit date la alte obiecte.
Se pot crea obiecte bazate pe o clas. O clas poate fi considerat ca un plan de
detaliu pentru obiecte. Acest plan de detaliu include atribute i metode pe care
obiectele create le pot mpri.
Exerciiul 1: Aplicaii ale Circuitelor Virtuale
Majoritatea programrilor folosite sunt numite programri secveniale. Aceasta
nseamn c, codul de programare scris de noi se execut o linie dup alta de ctre
microcontrolerul nostru. Nu exist nici o posibilitate ca ceva s ntrerup executarea
secvenei de cod. S vedem un exemplu!
Urmtorul program aprinde un LED tot la 4 secunde (2 secunde aprins, 2 secunde
stins). Dorim, de asemenea ca microcontrolerul s numere de cte ori este apsat un
buton, n acelai timp cu procesarea acestui cod.
Program dat ca exemplu pentru exerciiul 1.
Exerciiul 2: Adevratul reflex strigt i fuga de o umbr
Pentru acest experiment este nevoie de conectarea pe o plac a anumitor piese: 5 k
fotorezistor, 1 k rezistor (codul culorilor: maro, negru, rou, auriu). Fig. 8. prezint o
schem de conexiuni.
Figura 8: Exerciiul 2 diagrama bloc
Va trebui s comparm valoarea senzorului de lumin cu DarkLevel al nostru pentru a
ti cnd trebuie robotul s fug, astfel nct s folosim obiectul oCompare. Acesta
compar continuu intrarea (LightSensor.Value) cu valoarea sa de referin
(DarkLevelReference (referina nivelului ntunecat)). Dac valoarea de intrare se afl
peste sau sub valoarea de referin, proprietile Above (peste) i Below (sub) trebuie
reglate pe 1. Vom folosi aceast proprietate pentru a comanda motoarele noastre i
pentru a le pune n micare cnd nivelul de lumin scade sub DarkLevel-ul nostru.
n acest experiment, introducem obiectul oEvent, care ne va permite s efectum o serie de
declaraii cnd se modific o proprietate. Acest lucru este deosebit de util, din moment ce va
trebui s efectum anumite calcule complexe, sau un set incomod de declaraii pentru a-l face
pe robot s-i ndeplineasc sarcinile. Simplu, cnd proprietatea Operate a obiectului oEvent
este setat pe 1, OOPIC ncepe s execute declaraiile gsite n subrutina numit la fel ca i
obiectul cu _Code dup ea.
n programul anterior nu este dat valoarea constantei DarkLevel. Ea trebuie s fie
egal cu valoarea de la senzorul de lumin cnd nu este format deasupra lui umbra.
Programul de la exerciiul 2:
Care este rolul obiectului oA2D? Explicai pe scurt!
Exerciiul 3: Msurarea distanei
Robotul nostru are i un ranger IR care s msoare distana fa de obiecte. El produce o
tensiune (ntre 0 i +5 Volt) n funcie de ct de departe este obiectul de el. Ne vom folosi de
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 106 -
el pentru a face ca robotul s se deplaseze nainte pn cnd se afl la 5 centimetri de perete
(sau un alt obstacol).
OOPIC are un obiect numit oIRRange specific pentru acest senzor, care face ca procesul s
fie mai uor de implementat.
Fig. 8. V arat cum s conectai piesele ntre ele pentru acest experiment.
Figura 8: Exersai 3 conexiuni
Programul pentru exerciiul 2:
Va trebui s gsim valoarea obiectului oIRRange cnd el se afl la doar 5 centimetri
de un obstacol, astfel, folosind un liniar, punei ceva (de genul unei cri) n faa
ranger-ului de infraroii, la o distan de 5 centimetri i uitai-v la valoarea
obiectului de msurat (obiectul nostru oIRRange). Putem seta constanta noastr
numit ValueAt5cm la acea valoare.
Exerciiul 4: Pe cont propriu
Pe baza sarcinilor de mai sus, scriei programul care face ca robotul s se deplaseze
nainte dac vede un obstacol el s ncerce s-l ocoleasc!
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 107 -
Figura 1: Structura primei pagini
Figura 2: Selectarea exerciiilor
Figura 3: Introducerea soluiei
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 108 -
Figura 4: Structura sistemului
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 109 -
Exemplu de program de operare pe cartela PCI-1720
Not
Numele parametrilor folosii n acest exemplu difer de numele folosite la msurrile
actuale. Nu putei s tiai i s transpunei pri din acest exemplu.
/*
*********************************************************************
**
* Program : DASOFT.CPP
*
* Descriere : Program demonstrativ pentru funcia de ieire
analogic *
* Boards Supp. : PCL-818
seria/818HG/1800/816/812PG/711B/726/727/728, *
* PCI-1710/1720, MIC-2728, ADAM-4021/5024
*
* APIs folosite : DRV_DeviceOpen,DRV_DeviceClose,
DRV_GetErrorMessage *
* DRV_AOVoltageOut
*
* Revizie : 1.00
*
* Data : 7/8/1999 Advantech Co., Ltd.
*
*********************************************************************
**
*/
#include <windows.h>
#include <windef.h>
#include <stdio.h>
#include <conio.h>
#include "..\..\..\include\driver.h"
/******************************
* Declararea funciei locale *
******************************/
void ErrorHandler(DWORD dwErrCde);
void ErrorStop(long*, DWORD);
void main()
{
DWORD dwErrCde;
ULONG lDevNum;
long lDriverHandle;
USHORT usChan;
float fOutValue;
PT_AOVoltageOut tAOVoltageOut;
// Pasul 1: Afiai setrile hardware i software pentru rularea
acestui exemplu
printf("V rog, nainte de rularea acestui exemplu\n");
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 110 -
printf("s folosii utilitile de instalare a dispozitivului,
pentru a aduga dispozitivul.\n");
// Pasul 2: Introducei parametri
printf("\nVa rog introduceti parametri:");
printf("\nNumar dispozitiv (verificai utilitatea de instalare a
dispozitivului): ");
scanf("%d", &lDevNum);
printf("\nCanal de ieire: ");
scanf("%d", &usChan);
printf("\nValoare de ieire: ");
scanf("%f", &fOutValue);
// Pasul 3: Deschidei dispozitivul
dwErrCde = DRV_DeviceOpen(lDevNum, &lDriverHandle);
if (dwErrCde != SUCCESS)
{
ErrorHandler(dwErrCde);
printf("Program terminat!\n");
printf("Apsai orice tasta pentru a iei....");
getch();
exit(1);
}
// Pasul 4: Valoarea de ieire la canalul specificat
tAOVoltageOut.chan = usChan;
tAOVoltageOut.OutputValue = fOutValue;
dwErrCde = DRV_AOVoltageOut(lDriverHandle, &tAOVoltageOut);
if (dwErrCde != SUCCESS)
{
ErrorStop(&lDriverHandle, dwErrCde);
printf("Apsai orice tasta pentru a iei....");
getch();
return;
}
// Step 5: Afiarea datelor de ieire
printf("\nDate de ieire = %f\n", fOutValue);
// Step 6: nchidei dispozitivul
dwErrCde = DRV_DeviceClose(&lDriverHandle);
printf("\nApsai orice tasta pentru a iei....");
getch();
}//main
/********************************************************************
**
* Funcie: ErrorHandler
* Arat mesajul de eroare pentru respectivul cod de eroare
* introducere: dwErrCde, IN, Error code
* revenire: nici una
*********************************************************************
*/
void ErrorHandler(DWORD dwErrCde)
{
char szErrMsg[180];
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 111 -
DRV_GetErrorMessage(dwErrCde, szErrMsg);
printf("\nError(%d): %s\n", dwErrCde & 0xffff, szErrMsg);
}//ErrorHandler
/********************************************************************
**
* Funcie: ErrorStop
* Eliberai toate resursele i terminai programul dac
apar erori
* Paramateri: pDrvHandle, IN/OUT, pointer to Driver handle
* dwErrCde, IN, Error code.
* revenire: nici una
*********************************************************************
*/
void ErrorStop(long *pDrvHandle, DWORD dwErrCde)
{
//Mesaj eroare
ErrorHandler(dwErrCde);
printf("Program terminat!\n");
//nchidere dispozitiv
DRV_DeviceClose(pDrvHandle);
}//ErrorStop
Exemplu de program pentru operaiile contorului la cartela PCI-
1784
Not
Numele parametrilor folosii n acest exemplu difer de numele folosite la msurrile
actuale. Nu putei s tiai i s transpunei pri din acest exemplu.
/*
*********************************************************************
********
* Program : COUNTER.CPP
*
* Descriere : Program demonstrativ pentru funcionarea
contorului *
* Boards Supp. :
*
* API folosite : DRV_DeviceOpen,DRV_DeviceClose,
DRV_GetErrorMessage, *
* DRV_CounterReset, DRV_CounterEventStart,
DRV_CounterEventRead *
* Revizie : 1.00
*
* Dat : 7/8/1999 Advantech Co., Ltd.
*
*********************************************************************
*******
*/
#include <windows.h>
#include <windef.h>
#include <stdio.h>
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 112 -
#include <conio.h>
#include "..\..\..\..\include\driver.h"
/******************************
* Declararea funciei locale *
******************************/
void ErrorHandler(DWORD dwErrCde);
void ErrorStop(long*, DWORD);
void main()
{
DWORD dwErrCde;
ULONG lDevNum;
long lDriverHandle;
USHORT wChannel = 0;
USHORT wOverflow = 0; // counter over 32 bit flag
ULONG dwReading = 0;
PT_CounterEventStart tCounterEventStart;
PT_CounterEventRead tCounterEventRead;
// Pasul 1: Afiai setrile hardware i software pentru rularea
acestui exemplu
printf("nainte de a rula acest exemplu, v rugm s\n");
printf("folosii utilitile de instalare ale dispozitivului
pentru a aduga dispozitivul.\n");
// Pasul 2: Parametri de intrare
printf("\nV rugm s introduce parametri:");
printf("\nNumr dispozitiv (verificai utilitile de instalare
ale dispozitivului): ");
scanf("%d", &lDevNum);
printf("\nCanal de intrare: ");
scanf("\n%d", &wChannel);
// Pasul 3: Deschidei dispozitivul
dwErrCde = DRV_DeviceOpen(lDevNum, &lDriverHandle);
if (dwErrCde != SUCCESS)
{
ErrorHandler(dwErrCde);
printf("Program terminat!\n");
printf("Press any key to exit....");
getch();
exit(1);
}
// Pasul 4: Reset counter by DRV_CounterReset
dwErrCde = DRV_CounterReset(lDriverHandle, wChannel);
if (dwErrCde != SUCCESS)
{
ErrorHandler(dwErrCde);
printf("Program terminated!\n");
printf("Apsai orice tasta pentru a iei....");
getch();
exit(1);
}
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 113 -
// Pasul 5: ncepei operaia de numrare cu
DRV_CounterEventStart
tCounterEventStart.counter = wChannel;
dwErrCde = DRV_CounterEventStart(lDriverHandle,
&tCounterEventStart);
if (dwErrCde != SUCCESS)
{
ErrorHandler(dwErrCde);
printf("Program terminat!\n");
printf("Apsai orice tasta pentru a iei....");
getch();
exit(1);
}
// Pasul 6: Citii valorile contorului cu DRV_CounterEventRead in
while loop
// i afiai valorile contorului, ieii prin apsarea
oricrei taste
tCounterEventRead.counter = wChannel;
tCounterEventRead.overflow = &wOverflow;
tCounterEventRead.count = &dwReading;
while( !kbhit() )
{
dwErrCde = DRV_CounterEventRead(lDriverHandle,
&tCounterEventRead);
if (dwErrCde != SUCCESS)
{
ErrorStop(&lDriverHandle, dwErrCde);
return;
}
printf("\nValoare contor = %lu", dwReading);
Sleep(1000);
}
// Pasul 7: Oprii contorul prin DRV_CounterReset
dwErrCde = DRV_CounterReset(lDriverHandle, wChannel);
if (dwErrCde != SUCCESS)
{
ErrorHandler(dwErrCde);
printf("Program terminat!\n");
printf("Apsai orice tast pentru a iei....");
getch();
exit(1);
}
// Pasul 8: nchidei dispozitivul
dwErrCde = DRV_DeviceClose(&lDriverHandle);
getch();
printf("\nApsai orice tast pentru a iei....");
getch();
}//main
/********************************************************************
**
* Funcie: ErrorHandler
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 114 -
* Prezentai mesajul de eroare pentru codul de eroare
corespunztor
* introducere: dwErrCde, IN, Error code
* revenire: nici una
*********************************************************************
*/
void ErrorHandler(DWORD dwErrCde)
{
char szErrMsg[180];
DRV_GetErrorMessage(dwErrCde, szErrMsg);
printf("\nEroare(%d): %s\n", dwErrCde & 0xffff, szErrMsg);
}//ErrorHandler
/********************************************************************
**
* Funcie: ErrorStop
* Eliberai toate resursele i terminai programul dac
apar erori
* Paramatri: pDrvHandle, IN/OUT, pointer to Driver handle
* dwErrCde, IN, Error code.
* revenire: nici una
*********************************************************************
*/
void ErrorStop(long *pDrvHandle, DWORD dwErrCde)
{
//Mesaj de eroare
ErrorHandler(dwErrCde);
printf("Program terminat!\n");
//nchidei dispozitivul
DRV_DeviceClose(pDrvHandle);
printf("Apsai orice tast pentru a iei....");
getch();
exit(1);
}//ErrorStop
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 115 -
Sistemul embedded al unui robot mobil
Figura 5: Proprietile principale ale plcii
Figura 6: Placa senzorului
Aceste bare indic
faptul c ele au
conexiune
electric
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 116 -
Figura 7: Elementele incorporate n plac
Program eantion pentru exerciiul 1.
Dim LED as New oDIO1 Crearea obiectelor necesare
Dim ClickCount as New oByte
Dim Button as New oButton
Sub Main () Aici ncepe rularea programului
LED.IOLine = 7
LED.Direction = cvOutput
Button.IOLine = 6
Do
If Button.Value = 1 Then
ClickCount.Value = ClickCount.Value + 1
End If
LED.Value = 1
OOPic.Delay = 200
LED.Value = 0
OOPic.Delay = 200
Loop
End Sub
LED verde
Buton de apsare 1
IOline 5
LED galben
Buton de apsare 2
IOline 6
LED rou
Buton de apsare 3
IOline 7
Microfon
Conectat
La IOline 21
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 117 -
Figura 8: Exerciiul 2 Diagrama bloc
Programul pentru exerciiul 2:
Dim LeftMotor as New oDCMotor2
Dim RightMotor as New oDCMotor2
Dim LightSensor as New oA2D
Dim LightCompare as New oCompare
Dim DarkLevelReference as New oByte
Dim Connect as New oWire
Dim Scream as New oFreq
Dim RunAway as New oEvent
Const DarkLevel = ?
Sub Main ()
LeftMotor.IOLine1 = 26
LeftMotor.IOLine2 = 27
LeftMotor.IOLineP = 18
RightMotor.IOLine1 = 24
RightMotor.IOLine2 = 25
RightMotor.IOLineP = 17
LeftMotor.Value = -127
RightMotor.Value = -127
LightSensor.IOLine = 2
LightSensor.Operate = 1
DarkLevelReference = DarkLevel
LightCompare.Input.Link (LightSensor.Value)
LightCompare.ReferenceIn.Link (DarkLevelReference.Value)
LightCompare.Operate = cvTrue
Connect.Input.Link (LightCompare.Below)
Connect.Output.Link (RunAway.Operate)
Connect.Operate = cvTrue
Scream.Value = 61473
End Sub
Sub RunAway_Code ()
Scream.Operate = cvTrue
OOPic.Delay = 50
LeftMotor.Operate = cvTrue
RightMotor.Operate = cvTrue
OOPic.Delay = 200
LeftMotor.Operate = cvFalse
RightMotor.Operate = cvFalse
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 118 -
Scream.Operate = cvFalse
End Sub
Figura 8: Exerciiul 3 conexiuni
Programul:
Dim LeftMotor as New oDCMotor2
Dim RightMotor as New oDCMotor2
Dim Measure as New oIRRange
Dim StopAt5cm as New oByte
Dim DistanceCompare as New oCompare
Dim LeftWire as New oWire
Dim RightWire as New oWire
Const ValueAt5cm = ?
Sub Main()
Measure.IOLine = 4
Measure.Center = 20
Measure.Operate = cvTrue
LeftMotor.IOLine1 = 26
LeftMotor.IOLine2 = 27
LeftMotor.IOLineP = 18
RightMotor.IOLine1 = 24
RightMotor.IOLine2 = 25
RightMotor.IOLineP = 17
LeftMotor.Value = 127
RightMotor.Value = 127
StopAt5cm.Value = ValueAt5cm
DistanceCompare.Input.Link(Measure.Value)
DistanceCompare.ReferenceIn.Link(StopAt5cm.Value)
DistanceCompare.Operate = cvTrue
LeftWire.Input.Link(DistanceCompare.Above)
LeftWire.Output.Link(LeftMotor.Operate)
LeftWire.Operate = cvTrue
RightWire.Input.Link(DistanceCompare.Above)
RightWire.Output.Link(RightMotor.Operate)
RightWire.Operate = cvTrue
- -
4.1 Elemente de Baz ale Teleroboticii bazat
pe Internet
- 119 -
End Sub
- 120 -
Modulul 4.2
Mecatronic i Hardware n Simularea
Buclelor
Universitatea din Maribor
Autori: Andreja Rojko
Darko Hercog
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 121 -
Cuprins
Comanda micrii la dispozitivele mecatronice ......................................... Error! Bookmark not defined.
Controler n cascad............................................................................... Error! Bookmark not defined.
Controler PD ................................................................................................................................ - 121 -
Controlerul cuplului calculat ........................................................................................................ - 122 -
Mecanism experimental ............................................................................. Error! Bookmark not defined.
Experiment de reglare de la distan ......................................................... Error! Bookmark not defined.
Experiment de funcionare a reglrii de la distan ............................................................................ 5
EXERCIIU: Comanda micrii mecanismelor cu arc, experimente de la distan........................... - 125 -
Literatur.......................................................................................................................................... - 128 -
Comanda micrii la dispozitivele mecatronice
Controlerele de micare pot fi liniare i neliniare. Controlerele liniare funcioneaz
bine numai la mecanismele cu dinamic liniar, n timp ce controlerul neliniar corect
proiectat este eficient chiar i la mecanismele neliniare. n continuare se descriu trei
algoritmi de comand de baz. Sarcina studenilor este de a sincroniza parametrii a
trei controlere aplicate la comanda mecanismului cu arc, care are dinamic neliniar.
Problema ar trebuie rezolvat prin experimente de la distan.
Controler n cascad
Comanda micrii n cascad este adesea implementat la controlerele industriale.
Aceasta este compus din trei controlere, Figura 18. Controlerul de curent este adesea
un controler PI; controlerul de vitez este PI sau uneori PID. Controlerul de poziie
poate fi P, PI sau PID, dar cel mai adesea se folosete controlerul P. Un astfel de
controler este liniar, motiv pentru care este cel mai eficient pentru a comanda
mecanismele cu dinamic liniar sau cu angrenaje cu un raport mare de angrenare .
Figura 18: Controler de poziie n cascad
Controler PD
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 122 -
Controlerul PD este un controler liniar cu o bucl de feedback pentru poziie i vitez, folosit
adesea la comanda mecanismelor roboilor. Legea de comand este dat de:
,
Aici este amplificarea poziiei i este amplificarea vitezei. Eroarea de
poziie e este abaterea dintre referin i poziia actual i eroarea de vitez este
abaterea ntre referin i viteza actual:
n Figura 19 este reprezentat schema unui controler pentru un mecanism cu un singur
grad de libertate. Controlerul este potrivit pentru comanda micrii la mecanismele cu
dinamic liniar sau cu angrenaje avnd raport de angrenare mrit. Avantajul
principal al metodei l constituie faptul c este foarte simplu, motiv pentru care se
folosete adesea. Parametri controlerului pentru un mecanism specific se pot calcula
conform teoriei de comand a modelelor dinamice liniarizate sau prin simularea prin
procedura de aproximaie empiric. Sincronizarea fin a parametrilor trebuie realizat
experimental.
Figura 19: Controler de poziie PD
Controlerul cuplului calculat
Comanda cuplului calculat este metoda cunoscut din robotic, eficient, de
asemenea, la controlul mecanismelor neliniare. Aceast metod se bazeaz pe model,
motiv pentru care trebuie s existe un model dinamic invers foarte precis al
mecanismului pentru a anula efectele gravitaiei, ineriei, Coriollis i forelor
centrifuge. n cazul n care modelul este precis, comanda cuplului liniarizeaz i
decupleaz sistemul (adic, acesta are mai multe grade de libertate), motiv pentru care
asigur o urmrire precis a cii dorite. Legea de comand a cuplului calculat este:
.
este ineria estimat, sunt celelalte influene dinamice estimate i
este
acceleraia calculat:
este amplificarea poziiei iar este amplificarea vitezei. Schema
controlerului cu un mecanism care are un singur grad de libertate este reprezentat n
Figura 20. Dac parametri i modelul dinamic estimat sunt aproape de valorile reale,
atunci ecuaia dinamicii de eroare este liniar:
sunt cuplurile de perturbaie. Ecuaia erorilor poate fi comparat prin
transformarea Laplace cu ecuaia general a sistemului de ordinul doi:
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 123 -
Rezult c amplificarea poziiei i amplificarea vitezei depind de
frecvena natural dup cum urmeaz:
La majoritatea sistemelor mecanice trebuie evitate supramodulaiile, motiv pentru
care se prefer alegerea amortizrii critice D=1. Selectarea frecvenei naturale
determin viteza rspunsului. Pentru un rspuns mai rapid se aleg valori mai mari.
Totui, limita superioar a frecvenei naturale este limitat de muli factori. Deoarece
sistemele mecanice nu sunt niciodat complet rigide, frecvena natural trebuie aleas
suficient de mic pentru a nu cauza rezonan. n continuare, prin folosirea valorilor
mari ale frecvenei naturale, cuplurile calculate ale controlerului pot fi mai mari ca
cele care pot fi furnizate de motor (probleme de saturaie ale motorului).
Figura 20: Controlerul cuplului calculat
Mecanism experimental
Dispozitivul experimental al experimentelor de la distan l constituie mecanismul cu
arc, mecanismul cu un grad de libertate cu dinamic neliniar, reprezentat n Figura
21. Mecanismul este acionat prin acionarea direct a motorului cu dispozitiv de
codificare. Arborele motorului este n contact cu discul din sticl acrilic cu arc
anexat. Raportul dintre razele discului i arborelui motorului definete raportul de
angrenare, N=13.4. Pentru viteza constant, cuplul motor trebuie s se modifice
sinusoidal cu unghiul pentru a compensa cuplul arcului.
Figura 21: Mecanism cu arc
Experiment de la distan
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 124 -
n experimentul de la distan se implementeaz trei algoritmi de comand a micrii,
descrii anterior:
Controler n cascad compus din controler de poziie P, PI controler de vitez i PI
controler de curent. Parametrii ajustabili sunt Kp_pc amplificarea poziiei
controlerului de poziie P, Kp_vc P amplificarea vitezei controlerului de vitez i Ti_vc
care este constanta de timp integral a controlerului de vitez.
Controler PD cu bucl de feedback pentru poziie i vitez. Parametrii ajustabili ai
controlerului PD sunt amplificarea poziiei Kp_pd i amplificarea vitezei Kv_pd.
Controlerul cuplului calculat. Parametrii ajustabili ai controlerului cuplului calculat
sunt amplificarea poziiei Kp_ct i amplificarea vitezei Kv_ct. Compensarea cuplului i
frecrii arcului se pot inhiba.
Funcionarea experimentului de la distan
Pentru rularea experimentelor de la distan trebuie instalate pe computerul personal
al utilizatorului LabVIEW Run-time Engine i WebCam Client. Programele sunt
disponibile pentru ncrcare n seciunea Experimente Online.
Primul utilizator trebuie s nregistreze experimentul de la distan dnd clic pe fanta
de timp din tabelul de nregistrare. Dup ce nregistrarea este valid i dup ce se d
clic pe sgeata roie, n browser-ul web apare panoul de comand al experimentului.
La setarea iniial, dispozitivul experimental este inactiv i motorul mecanismului este
oprit. Experimentul poate fi activat prin apsarea butonului 'Turn the system ON'
(pornii sistemul).
Imaginea live a mecanismului experimental se poate vedea prin activarea programului
client Webcam i prin alegerea Control of nonlinear mechanism (comanda
mecanismului neliniar).
Panoul de comand al utilizatorului cu experimentul activat este reprezentat n Figura
22. Dup activarea experimentului mai trebuie s treac un anumit numr de minute,
pn cnd sunt prezentate semnalele msurate. Schema de comand aleas iniial este
controlerul PD. Dnd clic pe butonul 'Controller Type' (tip controler), utilizatorul
poate comuta pe algoritmul de comand a micrii n cascad.
Majoritatea semnalelor importante sunt reprezentate sub form grafic n interfaa
dintre un calculator principal i o reea de telecomunicaii a utilizatorului. Sunt
reprezentate urmtoarele semnale:
- n fereastra grafic principal sunt prezentate referina i poziia actual a
mecanismului (Reference and actual position [rad] (referina i poziia actual)).
- n fereastra din partea stng, jos, se prezint eroarea de poziie a
mecanismului (Position error [rad] (eroare de poziie)).
- Fereastra din partea dreapt, jos, indic referina i curentul actual al motorului
(Reference and actual current [A] (referina i curentul actual)).
Comutarea ntre diferite controlere este posibil de la butonul Controller type (tip
controler). Dac este activ controlerul, se pot modifica parametri.
Se pot modifica parametrii controlerului prin scrierea noii valori n csua
corespunztoare i prin apsarea >ENTER<. Dureaz cteva secunde pn la afiarea
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 125 -
rezultatele noilor parametri ai controlerului. Valorile permise ale parametrilor sunt
limitate la valorile la care comanda mainii este staionar. n cazul n care utilizatorul
scrie o valoare a parametrului mai mic sau mai mare dect cea permis, se vor aplica
valorile minime, respectiv maxime permise.
Sistemul ar trebui oprit la sfritul experimentului prin apsarea butonului galben
Turn the system OFF (OPRII sistemul) (starea butonului se modific apoi Turn
the system ON (PORNII sistemul)).
Figura 22: Partea frontal a utilizatorului, controler PD
EXERCIIU: Comanda micrii la mecanismul cu
arc, experimente de la distan
Controler de micare n cascad
Activai experimentul de distan i alegei controlerul de micare n cascad, ca
schem de comand activ n interfaa dintre un calculator principal i o reea de
telecomunicaii a utilizatorului (folosii butonul Controller type (tipul
controlerului)). Facei urmtoarele:
a) Analizai influena valorilor mari i mici a amplificrii P a controlerului de poziie
Kp_pc. Comentai urmtoarele aspecte: eroarea de poziie, stabilitatea.
b) Spunei care ar fi randamentul controlerului P dac la controlerul de poziie P se aplic
o amplificare mai mare Kp_pc (mai mare ca valoarea maxim posibil care se poate
implementa n experimentul de la distan).
c) Spunei care ar fi randamentul controlerului P dac la controlerul de poziie P se aplic
o amplificare mai redus Kp_pc (mai mic dect valoarea minim posibil care se
poate implementa n experimentul de la distan).
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 126 -
d) Analizai influena valorilor maxim i minim a amplificrii Kp_vc controlerului de
vitez P. Comentai urmtoarele aspecte: eroarea de poziie, stabilitatea.
e) Spunei care ar fi randamentul controlerului dac se aplic la controlerul P o
amplificare mult mai mare dect cea a controlerului de vitez Kp_vc (mai mare ca
valoarea maxim posibil care poate fi implementat n experimentul de la distan).
f) Spunei care ar fi randamentul controlerului dac se aplic la controlerul P o
amplificare mult mai mic dect cea a controlerului de vitez Kp_vc (mai mic dect
valoarea minim posibil care se poate implementa n experimentul de la distan).
g) Explicai rolul prii integrative din controlerul de vitez. Care ar fi rezultatele dac i
controlerul de vitez ar fi numai controler P.
h) Gsii parametri controlerului care dau eroarea de poziie cea mai mic. Folosii
procedura de aproximaie empiric.
i) Comentai rolul fiecrui controler (controler de poziie, de vitez i de curent) din
schema de comand a micrii n cascad.
j) Comentai randamentul controlerului dac din schema controlerului s-ar scoate
controlerul de vitez. ntr-o astfel de situaie, controlerul ar fi compus numai din
controler de poziie i de curent. Comentai urmtoarele aspecte: eroare de poziie,
stabilitatea.
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 127 -
Controler de micare PD
Alegei controlerul de micare PD ca i controler activ prin selectarea opiunii PD i a
cuplului calculat i blocnd cuplul calculat (Enb_ct este blocat, Enb_H_comp este
blocat) de pe interfaa dintre un calculator principal i o reea de telecomunicaii a
utilizatorului. Procedai dup cum urmeaz:
a) Analizai influena valorilor maxime i minime a amplificrii poziiei Kp_pd. Comentai
urmtoarele aspecte: eroarea de poziie, stabilitatea.
b) Spunei care ar fi randamentul controlerului dac se aplic la controler o amplificare
mai mare Kp_pd (mai mare ca valoarea cea mai mare posibil care se poate
implementa n experimentul de la distan).
c) Spunei care ar fi randamentul controlerului dac se aplic la controlerul P o
amplificare mai mic Kp_pd (mai mic dect valoarea cea mai mic posibil care se
poate implementa n experimentul de la distan).
d) Analizai influena valorilor maxim i minim a amplificrii vitezei Kv_pd. Comentai
urmtoarele aspecte: eroarea de poziie, stabilitatea.
e) Spunei care ar fi randamentul controlerului dac se aplic la controler o amplificare
mult mai mare Kv_pd (mai mare ca la valoarea maxim posibil care se poate
implementa n experimentul de la distan).
f) Spunei care ar fi randamentul controlerului dac se aplic la controlerul P o
amplificare mult mai mic Kv_pd (mai mic dect valoarea minim posibil care se
poate implementa n experimentul de la distan).
g) Aflai parametri controlerului care dau eroarea de poziie cea mai mic.
h) Reinei referina i curentul actual al controlerului PD cu parametri de comand
implicii i comparai cu curentul actual i de referin n cazul controlerului n
cascad. n care situaie semnalul de curent este mai zgomotos i atinge valorile mai
mari i de ce?
i) Randamentul acestui controler este mai bun ca randamentul controlerului n cascad
(are eroarea de poziie inferioar). Explicai de ce.
Cuplul calculat al controlerul de micare
Alegei controlerul de micare al cuplului calculat ca fiind controlerul activ, prin
selectarea opiunii 'PD&computed torque (PD & cuplu calculat)'. Activai cuplul
calculat prin compensarea efectului dinamic, pornind Enb_ct i Enb_H_comp (astfel
nct butoanele s fie verde deschis). Procedai dup cum urmeaz:
a) Analizai influena valorilor mari i mici ale amplificrii poziiei Kp_ct i amplificrii
vitezei Kv_ct. Comentai urmtoarele aspecte: eroare de poziie, stabilitate.
b) Gsii parametri controlerului care dau eroarea de poziie cea mai mic. Folosii
procedura de aproximaie empiric.
- -
4.2 Mecatronic i Hardware n Simularea Buclelor
- 128 -
c) Dezactivai compensarea cuplului arcului, gravitaiei i friciunii oprind Enb_H. ntr-o
astfel de situaie, este compensat numai influena ineriei. Urmrii randamentul
acestei metode de comand a cuplului parial calculat i comparai rezultatele cu
rezultatele obinute pentru controlerul cuplului complet calculat. Comentai
abaterile.
d) Comparai randamentul controlerului cuplului integral i parial calculat (Enb_H este
oprit) cu randamentul altor dou controlere prin compararea erorii de poziie, n
cele mai bune situaii. Situaia cea mai favorabil a fiecrui controler este cea n care
parametri alei rezult cu erorile de poziie cele mai mici. Comentai rezultatele.
Literatur
3. B. Armstrong-Helouvry, Control of machines with friction, Kluwer academic publisher,
Boston, 1991.
4. D. Hercog and K. Jezernik, Rapid control prototyping using MATLAB/Simulink and a
DSP-based motor controller, International Journal of Engineering Education, vol. 21,
no. 4, pp. 596-605, 2005.
5. W. Bolton, Mechatronics, Addison Wesley Longman Publishing, New York, 1999.
6. R. C. Dorf, International encyclopaedia of robotics. Volume 2, A Wiley Interscience
Publication, USA 1988.
7. L. Ljung, System identification, Prentice-Hall, New Jersey, 1987.
8. Mathworks, MATLAB and Simulink tutorials, available at the Mathworkss web page:
http://www.mathworks.com/academia/student_center/tutorials/, 2007.
9. R. Schilling, Fundamentals of robotics, analysis and control, Prentice-Hall
International, 1990
10. C.W. Silva (ed.), Mechatronics, an integrated approach, CRC press, 2005.
11. J. Slotine, W. Li, Applied Nonlinear Control, Englewood Cliffs, NJ:Prentice-Hall, 1991.
- 129 -
Modulul 4.3
Acionri cu dinamic ridicat
Comanda Micrii
Universitatea de Tehnologie Vienna
Autori: Thomas M. Wolbank
Markus Vogelsberger
Peter Macheiner
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
4.3 Acionri cu Dinamic Ridicat Comanda
Micrii
- 130 -
1.Introducere
Laboratorul Modulului 4.3 descris n continuare, este prevzut pentru ca studenii s
nvee interaciunile dintre convertoarele de putere, maina de c.a. i sistemul
mecanic.
Partea hardware central folosit este un sistem de poziionare pe dou axe, constnd
din dou axe liniare, una montat deasupra celeilalte fiecare fiind acionat de o
main sincron de c.a.
Pentru a se concentra asupra structurii fundamentale a comenzii orientate dup cmp,
se folosesc maini sincrone cu magnet permanent. Comanda sistemului const dintr-o
structur n cascad, cu o bucl interioar de comand a curentului, i buclele
exterioare de comand a vitezei i poziiei.
Toate structurile de comand sunt predefinite n sistem, pentru a evita consumul
timpului i depanarea frustrant a calculelor matematice de ctre studeni.
Sarcina studenilor const n aceia de a identifica sistemul pas cu pas prin parcurgerea
experimentelor i sincronizarea diferitele bucle de comand pentru o performan
general bun.
Scopurile educaionale ale modulului sunt:
o nelegerea operaiilor dinamice superioare a acionrilor de c.a.
o Identificarea influenelor parazite ale timpului mort al invertorului
o Aplicarea practic a comenzii orientate dup cmp
o Realizarea structurii de comand n cascad
o Implementarea comenzii micrii bidimensionale
Fiecare student trebuie s aib cunotine de baz n domeniul electronicii de putere i
acionrilor. Cunotinele impuse pentru prestarea tuturor sarcinilor, sunt urmtoarele:
o Modulaia limii impulsului la invertoarele trifazate
o Main sincron cu magnet permanent
o Calculul fazorului de spaiu
o Comanda orientat dup cmp
Aceste cunotine se pot obine din cursurile corespunztoare din cadrul
Universitilor partenere ale proiectului EDIPE, precum i din diferitele cri listate n
referine.
Drept urmare, dup parcurgerea ntregului modul, studenii ar trebui s dobndeasc
urmtoarele cunotine:
o PMSM:
o Folosit ca o parte dintr-o acionare dinamic superioar
o Care sunt componentele d/q,
o Rezolver estimarea poziiei
o Posibiliti de calibrare
o Interaciunea dintre numrul de posibile offset-uri ale rezolver-ului -
numrul perechilor de poli ai mainii
o Comanda orientat dup cmp
- -
4.3 Acionri cu Dinamic Ridicat Comanda
Micrii
- 131 -
o avantaje
o condiii de baz necesare
o simplificarea ecuaiei cuplului
o Structurile comandate n cascad i strategiile de proiectare ale controlerului
o Secvena corect de reglaj a diferitelor bucle de comand (bucla
interioar exterioar)
o Strategia de proiectare metoda amplitudinii optime estimarea
parametrilor de comand
o Strategia de proiectare metoda simetric optim estimarea
parametrilor de comand
o PWM
o Influena timpului mort al invertorului: asupra parametrilor
controlerului, semnalele de curent
o Influena frecvenei PWM: asupra parametrilor controlerului
o Influena frecvenei PWM: asupra semnalelor de curent
o Calculele i rezultatele msurrilor
o Parametri calculai ai controlerului i reacia corespunztoare a
sistemului
o Optimizarea parametrilor de comand compararea valorilor manual
reglate, calculate
o Influena comportamentului ne-ideal al sistemului
o Frecarea
o Alunecarea/ aderarea mecanic
o Influenele parazite cum sunt senzorii i zgomotul msurtorilor,
neliniaritatea invertorului/ electronicii de putere.
Descrierea sistemului - Hardware
Sistemul mecanic
La orele de laborator acionri dinamice puternice comanda micrii studenii vor
avea posibilitatea s presteze testele i experimentele cu domeniul studiat al comenzii
orientate, operarea alimentrii invertorului i comanda n cascad. Sistemul mecanic
operat este cel al sistemului de poziionare a dou axe, alimentat de maina sincron
PM. ntregul aranjament al sistemului mecanic se poate vedea n Fig. 1. El const din
dou axe liniare (6,7) fiecare echipat cu un urub conductor acionat de o main
sincron cu magnet permanent (PMSM) (4,5). Cea de-a doua ax (7) este montat la
partea superioar a primei (6). Fiecare din PMSM este alimentat de invertorul
individual i de partea electronic de comand (1, 2, 3) i prin urmare, permite
micarea separat a dou crue. Pe crua celei de-a doua axe (7) este fixat un magnet
de ridicare (8) care permite micarea unei a treia axe (peni sus/ peni jos).
Intervalul maxim de lucru a celor dou axe este 300mm.
- -
4.3 Acionri cu Dinamic Ridicat Comanda
Micrii
- 132 -
Fig. 1: Aranjamentul mecanic al sistemului de poziionare a celor dou axe
Electronica de comand
Electronica de comand este realizat dintr-un sistem industrial folosind limbajul de
programare superior (LabView). Pentru a evita depanarea de durat i compilarea
repetat, toate buclele software necesare efecturii experimentului, sunt predefinite.
Prin urmare, studentul se poate orienta asupra structurii de comand pentru
identificarea parametrilor de sistem i performanei diferitelor bucle de comand.
Mainile electrice
Fiecare main care acioneaz o ax este o main sincron cu magnei permaneni
(Fig 2.) Datele sunt urmtoarele:
Tensiunea nominal: U
N,eff
= 560V
Curentul nominal: I
N,eff
= 2,4A
Cuplul nominal: M
N
=1,72Nm
Viteza nominal: n
N
= 7200min
-1
Numrul de perechi de poli: p =3
Fig. 2: Poza PMSM
Msurarea poziiei i comanda orientat dup cmp
Poziia rotorului fiecrei maini este msurat folosind un rezolver ncorporat.
Principiul de lucru al rezolver-ului este prezentat n Fig. 3. El const dintr-un
aranjament de trei bobine. Prima este montat pe rotor i alimentat cu o tensiune
sinusoidal cu o anumit frecven. Celelalte dou bobine sunt fixate pe stator, fiecare
orientat la 90 una de alta. Bobina rotativ induce o tensiune sinusoidal n cele dou
bobine fixate pe stator, fiecare cu o deplasare de faz, corelat cu poziia unghiular a
bobinelor. Evaluarea corelrii fazelor dintre bobine este prin urmare posibil pentru a
determina poziia rotorului.
Fig.
- -
4.3 Acionri cu Dinamic Ridicat Comanda
Micrii
- 133 -
3: Schema rezolverului Fig. 4: Detectarea i
schema comenzii orientate dup cmp
Comanda orientat dup cmp
Rezultnd din strategia comandat orientat dup cmp, mainile de c.a. au avantajul
comenzii mainii de c.c. i fr neajunsul comutaiei mecanice. n continuare, aceast
structur de comand, prin achiziionarea unei stri staionare foarte stabile i a
comenzii tranzitorii, conduce la performane dinamice superioare.
Ideea care st la baza comenzii orientate dup cmp (FOC) este de a separa relaia
dintre flux i cuplu, ceea ce conduce la o separare a componentelor de curent
corespunztoare, pentru a obine dou valori independente. n fig. 4 se poate vedea o
structur de comand orientat dup cmp.
Identificarea sistemului, reglarea parametrilor (Descrierea experimentelor)
n continuare experimentele sunt astfel denumite pentru a identifica pas cu pas
parametri de sistem necesari.
Identificarea parametrilor mainii
Scopul experimentului:
Identificarea i cunotinele parametrilor mainii, cum ar fi rezistena statoric,
inductana statoric i constanta de timp a statorului, este absolut necesare pentru
orice operaie de acionare executabil.
Soluie:
Constanta de timp este identificat prin stabilirea unui pas de tensiune simplu al
mainii i exploatarea rspunsului curentului. Durata de timp, necesitile curente de
a crete de la zero la 63.2% (5/8) din valoarea strii staionare finale se vor identifica
i eticheta ca i constante de timp ale statorului. Rezistena statorului se poate
identifica prin folosirea valorilor de curent i de tensiune de la doi fazori de tensiune
stabilii diferit. Inductana rezult din cunoaterea rezistenei statorului i constantei
de timp a statorului.
Pentru detalii despre experiment, vezi descrierea online de pe pagina de web,
precum i versiunea ntreag a manualului (descrierea experimentului) de pe
Blackboard.
Calibrarea rezolverului
Scopul experimentului:
Aa cum s-a menionat, poziia rotorului este determinat prin folosirea rezolverului.
Dei rezolverul furnizeaz un semnal de poziie absolut, acesta trebuie s fie calibrat
cu privire la axa magneilor (axa d), deoarece montarea rezolverului pe arborele
rotorului este necunoscut.
Soluie:
Informaia unghiului referitoare la cele trei direcii d, fiecare la 120 (mecanic), este
identificat prin stabilirea unui fazor spaial simplu de curent al mainii, care
produce un cuplu mai mare ca i cuplul de frecare. Ca un rezultat al rotorului,
PMSM se va roti n sens opus direciei fazorului de curent i axa d va fi aliniat cu
axa fazorului de curent.
- -
4.3 Acionri cu Dinamic Ridicat Comanda
Micrii
- 134 -
Detalii legate de experiment gsii n descrierea online de pe pagina de web,
precum i versiunea integral a manualului (descrierea experimentului), de pe
Blackboard.
Proiectarea buclei de comand a curentului
Scopul experimentului:
Identificarea parametrilor de sistem necesari reglajului buclei de comand a
curentului. ntruct maina este acionat de un invertor al sursei de tensiune, ieirea
controlerului de curent este o tensiune. Pentru a calcula tensiunea optim pentru
ajustarea precis a curentului de referin, trebuie identificat corelaia dintre
tensiune i curent.
Soluie:
Comanda curentului este bucla de comand cea mai interioar. Structura de comand
a ambelor axe ale sistemului este aceiai la diferii parametri i se va realiza n
cadrul de referin d, q fixat pe rotor. Un controler PI proporional - integral se va
realiza ca i controler de curent, folosind metoda amplitudinii optime ca strategie de
proiectare.
Detalii legate de experiment gsii n descrierea online de pe pagina de web,
precum i versiunea integral a manualului (descrierea experimentului), de pe
Blackboard.
Proiectarea buclei de comand a vitezei
Scopul experimentului:
Identificarea parametrilor de sistem necesari la stabilirea comenzii vitezei dinamice
superioare a acionrii. Parametrul de sistem principal este momentul de inerie. Pe
baza rezultatelor obinute la experimentele anterioare, precum i din bucla de
comand a curentului reglat, se poate identifica acest parametru.
Soluie:
Urmtoarea bucl de comand care se situeaz deasupra controlerului de curent cel
mai interior, este bucla de comand a vitezei. Ca strategie de proiectare a
controlerului de vitez (realizat ca i controler PI), s-a selectat metoda simetric
optim. Din acest motiv, momentul de inerie trebuie determinat printr-un
experiment simplu.
Detalii legate de experiment gsii n descrierea online de pe pagina de web,
precum i versiunea integral a manualului (descrierea experimentului), de pe
Blackboard.
Proiectarea buclei de comand a poziiei
Scopul experimentului:
Reglai bucla de comand a poziiei pe baza rezultatelor experimentale. Evaluai
performana prin folosirea diferitelor funcii de referin (dreptunghiular,
triunghiular, sinusoidal). Identificai influena buclelor de comand interioare cnd
- -
4.3 Acionri cu Dinamic Ridicat Comanda
Micrii
- 135 -
valorile de referin ale curentului sau vitezei sunt saturate. Ajustai mai nti timpul
de stabilizare minim i apoi supracreterea minim.
Soluie:
Partea cea mai exterioar a schemei de comand n cascad este bucla de comand a
poziiei.
n structura implementat, controlerul de poziie ar trebui realizat numai cu o
amplificare proporional. Modul de identificare a parametrilor (pentru parametri
necesari ai controlerului proporional) se face prin efectuarea experimentelor
empirice.
Detalii legate de experiment gsii n descrierea online de pe pagina de web,
precum i versiunea integral a manualului (descrierea experimentului), de pe
Blackboard.
Comanda cii continue (comanda numeric continu)
Dac toate experimentele anterioare s-au executat cu succes pentru ambele axe ale
sistemului, studentul poate defini el nsi un parcurs a dou planuri dimensionale ale
sistemului.
Detalii legate de experiment gsii n descrierea online de pe pagina de web,
precum i versiunea integral a manualului (descrierea experimentului), de pe
Blackboard.
Dup ce timpul alocat laboratorului a expirat, sistemul se va dezactiva automat,
legtura internet se va ntrerupe i rapoartele se vor trimite pe email.
- 136 -
Modulul 4.4
Acionri Electrice Automobilistice
Universitatea de Tehnologie Brno
Autori:
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
4.4 Acionri Electrice Automobilistice
- 137 -
Introducere
Scopul principal al acestui modul l constituie msurarea de la distan att a bateriei
cu acid-plumb ct i a unui alternator cu poli ghear.
Pentru vizualizarea acestui modul se impune ca s fie instalat motorul LabVIEW Run-
Time Engine (cel puin versiunea 8.6). n timpul conexiunii din timpul sesiunii s-ar
putea ca i anumite programe antivirus s creeze probleme.
Scopul exerciiului de msurare a bateriilor cu acid-plumb:
5) Msurai tensiunea fr sarcin U
0
.
6) Msurai raportul tensiune i curent de sarcin.
7) Calculai valoarea rezistenei difereniale a bateriei pentru toate valorile curentului de
sarcin.
Scopul exerciiului Msurarea alternatorului cu poli cu gheare:
1) Msurai raportul dintre tensiunea de ieire i curentul de excitaie n cazul
alternatorului fr sarcin, la vitez constant.
2) Msurai raportul dintre tensiunea de ieire i vitez pentru alternatorul fr sarcin
cu un curent de excitaie constant. Reglai viteza la nceputul ncrcrii.
3) Msurai raportul dintre curentul de ieire i vitez la un curent de excitaie constant
I
b
= I
bmax
i la o tensiune de ieire constant U = 13,5 V (caracteristica curent-vitez).
Msurarea procedurii:
Amndou exerciiile de msurare a interfeei se fac prin programul LabVIEW .
Msurarea bateriei cu acid-plumb
Obr.1 Msurarea interfeei
Legend: 1 hri, 2 voltmetru, 3 valoarea diferenial a rezistenei, 4
valoarea tensiunii fr sarcin, 5 ampermetru, 6 butonul de reglare a tensiunii fr
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
- -
4.4 Acionri Electrice Automobilistice
- 138 -
sarcin, 7 reglarea rezistorului de sarcin, 8 tabel, 9 buton tergere tabel, 10
salvarea n tabel a valorilor msurate i calculate, 11 buton de ncepere a msurrii
12 buton de conectare faze, 13 lumina indicatoare a conexiunii ncrcrii, 14
cmpul cu textul pentru adresa de e-mail, 15 cmpul cu textul pentru subiectul de e-
mail, 16 - butonul de trimitere a valorilor prin e-mail.
Mai nti trebuie pornit locul de munc de la butonul Switch On dup pornirea
exerciiului. Un voltmetru este conectat la baterie dup nceperea msurrii i pe
interfaa de msurare se afieaz o valoare a tensiunii fr sarcin U
0
. Aceast valoare
trebuie salvat (cu ajutorul butonului Set U
0
). Apoi este posibil conectarea sarcinii
(nu este posibil activarea conexiunii de ncrcare fr reglarea U
0
). Sarcina este
ncrcat cu ajutorul ntreruptorului Connect load (conectai sarcina). La baterie se
conecteaz o sarcin de 14 dup ce ntreruptorul Connect load este activ. Apoi
este posibil diminuarea rezistenei de sarcin cu ajutorul barei R care va determina
creterea curentului de sarcin. n timpul msurtorilor este posibil salvarea valorilor
curente n tabelul cu valori msurate cu ajutorul butonului Save (salvare). Toate
valorile msurate se pot terge din tabel sau grafic de la butonul Reset (resetare). De
asemenea, o sarcin este deconectat, dac se apas butonul. Toate valorile msurate
se pot trimite la adrese de email dup terminarea msurtorilor. n cmpul de editare a
Subjects (subiectelor) se scrie un subiect al e-mail-ului i adresa de e-mail se trece n
cmpul de editare al Recipients (destinatari). Dac se impune expedierea datelor la
mai multe adrese, este posibil adugarea adreselor prin creterea numerelor cu unu,
lng articolul de Recipients (destinatari). Se apas butonul Send (expediere) i e-
mail-ul este expediat dup ce s-au completat amndou articolele (adresa de e-mail i
subiectul). Va aprea n e-mail o anex aku.lvm, care conine tabelul cu valorile
msurate. Prima coloan a tabelului conine valoarea tensiunii bateriei, cea de-a doua
coloan valorile curentului de sarcin, iar ultima coloan rezistena diferenial.
Procedura de msurare:
1. Pornii instrumentele cu ajutorul butonului Switch On (pornire).
2. Introducei valoarea tensiunii fr sarcin apsnd butonul Set U
o
(reglai U
o
).
3. Conectai sarcina cu ajutorul ntreruptorului Connect Load (conectai
sarcina).
4. Modificai valoarea sarcinii cu ajutorul controlerului R.
5. Este posibil salvarea valorii cu ajutorul butonului Save Value (salvai
valoarea).
6. Mai nti deconectai sarcina cu ajutorul ntreruptorului Connect Load dup
terminarea msurtorilor i oprii echipamentul de la ntreruptorul Switch On
(pornete).
Msurarea alternatorului cu poli ghear
Scopul n cadrul acestei msurtori este de a msura trei caracteristici. Fiecare dintre
ele i are propria interfa. Ele sunt:
Tensiunea de ieire n funcie de curentul de excitaie, la vitez constant n condiii
fr sarcin,
Tensiunea de ieire n funcie de vitez, la curent de excitaie constant n condiii fr
sarcin,
Curentul de ieire n funcie de vitez, la curent de excitaie constant I
b
= I
bmax
i cu
tensiune constant U = 13,5 V.
- -
4.4 Acionri Electrice Automobilistice
- 139 -
Fig. 2 Alegerea interfeei din exerciiul de msurare
Apsai butonul Run Measurement (rulai msurarea) de la exerciiul ales, pentru a-l
rula.
Primul exerciiu este de a msura tensiunea de ieire n funcie de curentul de
excitaie, la vitez constant (vezi fig. 3). Interfaa acestei msurtori este mprit n
trei pri
Fig. 3 Msurarea tensiunii de ieire n funcie de curentul de excitaie, la interfaa
vitezei constante.
Prima parte verific dac exist sau nu controlere pentru vitez i curent de excitaie.
n partea a doua exist tabele, grafice, panouri de afiare ale valorilor msurate i
butonul Write (scriere), care servete la salvarea valorilor n tabel.
Ultima parte const din trei butoane. Primul buton Menu (meniu) servete la aceia ca
s se revin n meniul principal unde s se poat efectua alegerea exerciiului. Cel de-
al doilea buton New Measurement (msurtoare nou) servete la datele memorate n
graficele i tabelele care se terg. Ultimul buton Send Protocol (trimite proces
verbal) servete la trimiterea valorilor msurate prin e-mail. n cadrul interfeei de
msurare se deschide o fereastr (fig. 4), dac se apas acest buton. n cmpul
destinatarului se va scrie o adres de e-mail i n cmpul de subiect se va trece
subiectul e-mail-ului. Dup aceia apsai pe butonul Trimite. La adresa de e-mail
- -
4.4 Acionri Electrice Automobilistice
- 140 -
destinatar se va trimite un fiier cu extensia numelui de fiier lvm de la adresa de e-
mail edipe@feec.vutbr.cz. Acest fiier conine datele msurate care sunt mprite n
aceleai coloane ca n tabel (se descrie n partea Description (descriere) a fiierului
expediat care sunt valorile scrise n care coloan).
Fig. 4. Trimiterea datelor msurate prin interfaa de e-mail.
Cel de-al doilea exerciiu este tensiunea de ieire n funcie de vitez, la un curent de
excitaie constant, n starea fr sarcin (vezi fig. 5). Interfaa acestei msurri este
similar cu interfaa de msurare anterioar.
Fig. 5: Tensiunea de ieire n funcie de vitez, la interfaa curentului de excitaie
constant.
Prima diferen fa de primul exerciiu o constituie aceia c valoarea curentului de
excitaie i valoarea vitezei sunt setate cu ajutorul a dou controlere. Cea de-a doua
diferen este aceia c valoarea curentului de excitaie, valoarea vitezei i valoarea
tensiunii de ieire sunt afiate ca valori msurate.
Cel de-al treilea i ultim exerciiu este msurarea caracteristicii curentvitez
(msurarea curentului de ieire n funcie de vitez, cu I
b
=const.=4 A,
U=const.=13,5 V). Interfaa acestei msurtori este similar cu msurtorile
anterioare.
- -
4.4 Acionri Electrice Automobilistice
- 141 -
Fig. 6 Interfaa de msurare a curentului de ieire i vitezei.
Prima diferen const n seciunea controlerelor. Exist dou ntreruptoare. Primul
ntreruptor al curentului de excitaie servete la conexiunea curentului de excitaie de
4A. Tensiunea constant de 13,5 V este pstrat la alternator cu ajutorul celui de-al
doilea ntreruptor, la ieirea tensiunii, dup activarea sa. Este posibil modificarea
valorii vitezei cu ajutorul ultimului controler.
Cea de-a doua diferen este aceia c valorile curentului de excitaie, valorile tensiunii
de ieire, valorile vitezei i valorile curentului de ieire sunt afiate ca valori msurate.
Procedura de msurare:
Msurarea tensiunii de ieire n funcie de curentul de excitaie, la vitez constant
1. Pornii motorul de acionare cu ajutorul butonului Start/Stop (pornit/ oprit) sub
semnul vitezei de rotaie
2. Setai valoarea necesar a vitezei cu ajutorul controlerului vitezei de rotaie
3. Pornii sursa de alimentare cu curent de excitaie, cu ajutorul butonului Start/Stop,
sub semnul Curentului de Excitaie
4. Setai treptat valorile impuse ale curentului de excitaie, cu ajutorul controlerului
Curentului de Excitaie
5. Salvai valorile n tabel i grafic cu ajutorul butonului Write(scriere)
6. Oprii alimentarea cu curent de excitaie i motorul de acionare dup terminarea
msurrii, de la butonul Start/Stop
Msurarea tensiunii de ieire n funcie de vitez, la curent de excitaie constant
1. Pornii sursa de alimentare cu curent de excitaie, cu ajutorul butonului Start/Stop,
sub semnul Curentului de Excitaie
2. Setai valoarea curentului de excitaie impus, de la controlerul Curentului de Excitaie
3. Pornii motorul de acionare de la butonul Start/Stop sub semnul Vitezei de Rotaie
4. Setai treptat valorile impuse ale vitezei de la controlerul Vitezei de Rotaie
5. Salvai valorile n tabel i grafic cu ajutorul butonului Write(scriere)
6. Oprii alimentarea cu curent de excitaie i motorul de acionare dup terminarea
msurrii, de la butonul Start/Stop
Msurarea curentului de excitaie de ieire n funcie de vitez
1. Pornii sursa de alimentare cu curent de excitaie, cu ajutorul butonului Start/Stop,
sub semnul Curentului de Excitaie
- -
4.4 Acionri Electrice Automobilistice
- 142 -
2. Setai valoarea curentului de excitaie impus, de 4A de la ntreruptorul Curentului
de Excitaie
3. Conectai sarcina de la butonul Start/Stop sub semnul Tensiunii de ieire
4. Pornii comanda tensiunii de ieire de 13,5V de la butonul Tensiunii de ieire
5. Pornii motorul de acionare de la butonul Stop sub semnul Vitezei de Rotaie
6. Setai treptat valorile impuse ale vitezei de la controlerul Vitezei de Rotaie
7. Salvai valorile n tabel i grafic cu ajutorul butonului Write(scriere)
8. Oprii alimentarea cu curent de excitaie i motorul de acionare dup terminarea
msurrii, de la butonul Start/Stop
- 143 -
Modulul 4.5
Sistem de Rezervoare de Ap Comandat
cu Minicontrollere Logice
Universitatea Tehnic Kosice
Autori: Daniela Perdukov
Viliam Fedk
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 144 -
Cuprins
1. Scopul principal al experimentului de la distan
2. Cerine din partea studenilor nainte de a lucra n laboratorul PLC bazat pe web
3. Obiective educaionale
4. Arhitectura laboratorului virtual PLC bazat pe web
5. Modelul procesului tehnologic
6. Sistemul de comand
7. Cum se lucreaz ntr-un laborator virtual
8. Repartizri
9. Material de studiu adiional
1. Scopul principal al experimentului de la distan
Principalul scop al experimentului de la distan const n nvarea i colarizarea
studenilor asupra modului cum s dezvolte i s depaneze un program de comand
eficient pentru Programmable Logic Controller (PLC) (controlerul logic
programabil) care este interconectat ntr-un model de laborator a proceselor
tehnologice asigurnd comanda sa. Executarea programelor de comand asupra
echipamentului actual fr testarea lor prin intermediul modelului virtual poate
conduce la coliziuni i deteriorarea sistemului. Acesta este motivul; un student
depaneaz un program pentru PLC care comand un model virtual al procesului.
Modelele virtuale ajut la verificarea programelor, prevenind astfel deteriorarea
echipamentului.
n general, experimentarea de la distan folosind sistemele PLC bazate pe web nu se
limiteaz numai la educaie. n industria productoare, accesul de la distan la
echipamente i instalaii situate la distan, prevede oportuniti unice ale
monitorizrii, controlrii i diagnosticrii de la distan a sistemelor productoare
situate n diferite locaii geografice. De asemenea, numai un utilizator activ poate
interaciona cu modelul fizic i poate descrca/ executa programul su PLC. n
laboratorul virtual, programul PLC, care ruleaz sistemul fizic, ruleaz i modelul
virtual. Prin urmare, nu exist nici o diferen ntre lumile reale i cele simulate,
din punctul de vedere al programrii PLC.
Experimentul a fost dezvoltat n cadrul Web-based PLC Laboratory for
Technological Processes Control (laboratorului PLC bazat pe web de comand a
proceselor tehnologice) care se afl n cadrul Universitii Tehnice din Kosice,
Departamentul de Mecatronic Electric i Inginerie Industrial, Slovacia.
Locurile de munc ale modulului ON LINE conin urmtoarele modele de laborator
ale proceselor tehnologice care urmeaz a fi controlate prin PLC pentru care studenii
vor trebui s elaboreze un program de comand. Acestea sunt:
1) Sistemul de rezervoare de ap (pentru experimentul de la distan nr. 4.5)
2) Sistemul de transportoare (pentru experimentul de la distan nr. 4.6)
Modelele de laborator ale proceselor tehnologice servesc numai pentru munca n
laborator. Studenii sunt capabili s verifice corectitudinea algoritmului de comand
prin modelul virtual al procesului tehnologic care este conectat la intrrile i ieirile
reale ale PLC.
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 145 -
Dup verificarea programului de comand studenii sunt pregtii s munceasc cu
modele fizice reale ale proceselor tehnologice n cadrul laboratorului.
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 146 -
2. Cerine din partea studenilor nainte de a lucra n laboratorul PLC bazat pe
internet
Pentru a proiecta corect programul de comand, pentru a comanda procesele
tehnologice prin PLC, se impun urmtoarele cunotine:
Circuite combinate
Circuite secveniale
Comand logic
Programarea n limbajul de la STEP 7
Programarea diagramei simetrice
Structura PLC i componentele PLC
Instruciunile PLC
3. Obiectivele educaionale
La proiectarea i realizarea programului de comand al mediului de lucru al PLC
SIMATIC 300 studenii vor nva cum:
- S creeze un proiect nou,
- S defineasc structura HW a PLC conform cu cerinele proceselor tehnologice,
- S configureze reele industriale (PROFIBUS, TCP/IP),
- S defineasc ieiri i intrri (tip, nume),
- S defineasc variabilele impuse,
- S proiecteze programul de comand n forma unei diagrame simetrice sau a
limbajului de programare STEP 7,
- S verifice programul de comand proiectat n modul de simulare,
- S descarce programul de comand n PLC,
- S depaneze programul de comand n modul monitor,
- S comute modurile n PLC,
- S ruleze programul de comand n PLC.
Pentru realizarea sarcinii de comand date, sunt date:
- O mas cu intrri analogice i digitale,
- O mas cu ieiri ale modelului proceselor tehnologice,
- O schem structural a interconexiunilor ei cu PLC,
- Modulele I/O sunt necesare s comande procesul tehnologic.
4. Arhitectura laboratorului virtual PLC bazat pe web
Arhitectura laboratorului bazat pe web este prezentat n Fig. 1. Laboratorul include
locuri de munc, cu PC, care sunt interconectate la intrri i ieiri ale PLC. Ele
servesc la munca n modul ON LINE, precum i la pregtirea formal a sarcinilor n
modul OFF LINE.
Cnd studenii lucreaz n modul ON LINE prin intermediul internetului, modelele
fizice reale ale proceselor tehnologice sunt nlocuite cu modele virtuale. Intrri/ ieiri
analogice i binare ale modelelor virtuale sunt, de asemenea, interconectate cu PLC.
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 147 -
n laboratorul virtual toate locurile de munc sunt conectate prin intermediul reelei
locale la serverul laboratorului, prin care este posibil un acces prin "ecranul de la
distan" la fiecare loc de munc sau loc de utilizare a serviciilor obinuite din
laborator, ale fiecrui loc de munc.
Fig. 1 Arhitectura laboratorului bazat pe web
Serverul de laborator permite comanda diferitelor locuri de munc particulare ale
computerelor de la distan conectate la internet i administrarea folosirii lor de ctre
studeni. n cazul n care locul de munc este liber, serverul laboratorului permite
transferul virtual al ecranului, mouse-ului, tastaturii i altor scule standard, din PC-ul
din laborator la orice PC arbitrar conectat la internet i prin urmare permite munca
virtual cu PLC concret i modelul su virtual.
Modelul virtual funcioneaz automat dup ce utilizatorul se nregistreaz prin server
la locul de munc concret.
5. Modelul procesului tehnologic
Modelul de laborator const din dou rezervoare de ap interconectate prin evi (Fig.
2).
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 148 -
Fig. 2 Structura sistemului comandat i locul de munc din laborator
Apa este pompat din rezervorul nr. 1 n rezervorul nr. 2 cu ajutorul pompei nr. 2 i
din rezervorul nr. 2 n rezervorul nr. 1 cu ajutorul pompei nr. 1. Rezervorul nr. 1 este
un rezervor de referin pentru care utilizatorul introduce valoarea de referin a
nlimii apei (n milimetri) care este sesizat de un senzor analogic.
Rezervorul nr. 2 servete ca rezervor de ap. Instalaia cuprinde dou pompe care
pompeaz apa ntre rezervoare. Pompa 1 pompeaz apa din rezervor spre rezervorul
de referin i pompa 2 invers pompeaz apa din rezervorul de referin n rezervor.
Fiecare rezervor conine doi senzori marginali, care servesc la verificarea strii
marginale, adic revrsarea (Limita SUPERIOAR) i golirea rezervorului (Limita
INFERIOAR).
Modurile operaionale ale modelului de laborator:
1. Modul manual echipa de operare poate porni i opri arbitrar pomparea celor
dou pompe n rezervoare i verific vizual nivelul apei n rezervor. Pornirea i
oprirea pompelor se poate face cu ajutorul unui model virtual.
2. Modul automat cnd echipa de operare elaboreaz o instruciune pentru
valoarea impus a nivelului din rezervorul nr. 1 i programul de comand va
asigura stabilizarea nivelului de ap la valoarea de referin. n acest mod, se
impune, de asemenea, introducerea valorii unei histereze pentru variabila
comandat.
Valoarea impus pentru histerez intr printr-un model virtual. Ea impune o
valoare a nlimii apei care se situeaz n intervalul 0 100 mm. Ieirea de la
senzorul analogic d valoarea analogic a tensiunii n intervalul 0 10 V, care
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 149 -
dup ce este transmis la PLC d o valoare sau tipul INT n intervalul 500 26
000. Valoarea histerezei nu trebuie s fie mai mic dect 0.5 mm.
Alegerea modelului operaional este realizat de ntreruptoarele corespunztoare din
modelul virtual.
6. Sistemul de comand
Sistemul de comand este prezentat de ctre controlerul logic programabil (PLC)
SIMATIC 300. Const din procesorul CPU 313C-2DP i cartelele adiionale digitale
de intrare/ ieire. Comunicaia ntre PC i PLC este asigurat de magistrala MPI
(Multi Point Interface (interfa multipunct)).
Descrierea intrrilor, ieirilor i locaiilor de memorie (adreselor) din PLC, care este
necesar dezvoltrii programului de comand pentru procesul tehnologic dat, are
urmtoarea structur.
Intrri digitale Ieiri digitale
Pompa 1 ON/OFF (pornit/ oprit)
Pompa 2 ON/OFF (pornit/ oprit)
Ieirile analogice
nlimea apei n rezervorul de
referin
Locaiile de memore
n tabel sunt date adresele pentru:
Modul automat
Modul manual
Butonul ON/OFF Pompa 1
Butonul ON/OFF Pompa 2
Limita LOW (inferioar) n
rezervorul de referin
Limita HIGH (superioar) n
rezervorul de referin
Limita LOW rezervor
Limita HIGH rezervor
nlimea impus a apei
Histereza
7. Cum s se munceasc ntr-un laborator virtual
nainte de rularea experimentului, pentru depanarea programului PLC, studentul
trebuie s nvee cum s opereze i manipuleze procesul tehnologic virtual. n textul
complet al experimentului, de pe internet, se afl descrierea detaliat a urmtoarelor
instruciuni:
Intrarea n laboratorul virtual explicarea ecranului introductiv i a
icoanelor.
Instalarea primei conexiuni. Deoarece conexiunea la locul de munc este
realizat printr-un serviciu de Conectare a ecranului de la distan,
utilizatorului i se va cere s instaleze prima conexiune la laborator, serviciul
ActiveX Control.
Pornirea mediului software pentru sistemul de comand ales. n cazul PLC-
ului de la Siemens, acesta este programul Simatic Manager.
Ieire. Dac utilizatorul nu e conectat, peste 10 minute sistemul i anuleaz
nregistrarea sau munca se ncheie prin anularea nregistrrii de pe computerul
local (Start - Log Off)
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 150 -
Noua pornire a proiectului
Pentru a dezvolta programul de comand propriu pentru comanda proceselor
tehnologice, studentul este condus sistematic i succesiv prin paii individuali, dup
cum urmeaz:
Pornirea programului SIMATIC Manager. Dup parcurgerea pailor de pornire,
apar o serie de ecrane i ghidul Wizzard care const din 4 ecrane:
- Primul ecran posibilitatea de creare a proiectului pas-cu-pas.
- Al doilea ecran alegerea unui tip de procesor (CPU). n mod obinuit, exist
la dispoziie PLC SIMATIC 300 cu procesor CPU313C-2DP
- Al treilea ecran alegerea limbajului de programare, n care se va elabora
programul: (STL limbaj STEP 7, LAD diagrama simetric, FBD blocuri
funcionale).
- Al patrulea ecran denumirea i salvarea proiectului i terminarea lucrului
cu Wizzard.
Proiectarea configuraiei HW (Hardware).
Alegerea configuraiei HW:
- Staia SIMATIC 300
- Hardware a CPU313-2DP(1)
- Componentele HW care formeaz PLC-ul, sunt date ntr-un Catalogue
(catalog).
Studentul selecteaz treptat urmtoarele componente:
1. componenta Rail (in) (bara de fixare a PLC) din documentul Rack-300,
2. din componenta CPU 313C-2-DP se selecteaz 6ES7 313-1AD03-0AB0,
subsistemul V 2.0,
3. componente adiionale: cartel pentru intrri i ieiri binare
DI16/DO16x24V/0,5A.
Dup alegerea ferestrei cu configuraia HW apare o fereastr SIMATIC Manager
mediul de lucru pentru dezvoltarea programului.
Dezvoltarea programului
Dup deschiderea obiectului OB1 n partea din stnga a ferestrei, este reprezentat o
librrie de elemente (diferite tipuri de contacte de pornire i oprire, contoare,
temporizatoare, funciuni, ...) care sunt necesare pentru dezvoltarea programului de
comand n forma unei scheme simetrice. Elementele de baz selectate ale librriei
sunt reprezentate cu icoane, de asemenea, n partea din dreapta a Tool panel (panoului
de scule) din fereastra SIMATIC Manager (Fig. 3).
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 151 -
Fig. 3 Indicarea modului RUN (RULARE) n PLC
Programul de comand const din aa numitele networks (reele), care prezint
realizarea unei ntregi funcii. Treptat:
inserm o alt network n program,
inserm elementul impus n poziia actual activ de pe network,
salvm programul de comand dezvoltat.
Dup descrcarea programului de comand n PLC, acesta rmne n modul RUN
(rulare).
Modurile PLC se pot comuta prin comanda PLC/modul de operare.
Sistemele permit depanarea programului de comand care ruleaz n PLC cu
ajutorul funciei MONITOR, care permite urmrirea strii fiecrui element (contacte,
contoare, temporizatoare, funciuni, etc.) din programul de comand.
8. Sarcini
Scopul comenzii
Scopul comenzii este de a comanda nivelul de ap n rezervorul de referin
corespunztor valorii impuse.
Sarcina 1:
Elaborai un program de comand
- care s asigure o nlime impus a nivelului din rezervorul de referin,
corespunztor valorii impuse date.
Sarcina 2:
- -
4.5 Sistem de Rezervoare de Ap Comandat cu
Minicontrollere Logice
- 152 -
Elaborai un program de comand
1. care va asigura o nlime impus a apei n rezervorul de referin, corespunztor
valorii impuse i
2. care, n caz de perturbaii (prezentate prin strile marginale limitele HIGH
(SUPERIOAR) i LOW (INFERIOAR) va opri pompa corespunztoare.
9. Material de studiu adiionale
[1] G. Dunning, Introduction to Programmable Logic Controllers, Delmar Thomson Learning
[2] F. D. Petruzella, Programmable Logic Controllers, McGraw-Hill
[3] W. Bolton, Programmable Logic Controllers, Fourth Edition, Newnes
[4] S. P. Tubbs, Programmable Logic Controller (PLC) Tutorial, Stephen Philip Tubbs
[5] R. Cox, Technician's Guide to Programmable Controllers, Delmar Cengage Learning
[6] K. Collins, PLC Programming for Industrial Automation, Exposure Publishing
[7] Siemens, Manual Siemens S7-300, Edition 2003
- 153 -
Modulul 4.6
Sistem de Transportoare Controlate de
SLC
Universitatea Tehnic Kosice
Autori: Daniela Perdukov
Viliam Fedk
Aceste activiti au fost realizate n cadrul proiectuluit "nmnt practic n form electronic
interactiv la distan (EDIPE)". Acest proiect a fost suportat de Comunitatea European n
cadrul programului Leonardo da Vinci II (proiect Nr CZ/06/B/F/PP-168022). Opiniile exprimate
de autori nu reflect n mod neaprat poziia Comunitii Europene, nici nu implic vreo
responsabilitate din partea acesteia.
- -
4.6 Sistem de Transportoare Controlate de SLC
- 154 -
Cuprins
1. Despre modul
2. Model de transportoare
3. Descrierea proceselor tehnologice
4. Descrierea sistemului de comand
5. Sarcini
6. Materiale pentru studiu adiional
1. Despre module
Principalul scop al experimentului de la distan const din educaia i colarizarea
studenilor cu privire la modul de dezvoltare i depanare a unui program de comand
eficient pentru Programmable Logic Controller (PLC) (controlerul programabil
logic) care comand un model de laborator ale proceselor tehnologice, constnd din
trei transportoare de materiale n vrac care se pot depozita n dou containere.
Aranjamentul sistemului de comand n acest modul (Nr. 4.6: Sistem de transportoare
comandate de PLC) este similar cu echipamentul n modulul nr. 4.5: Sistem de
rezervoare de ap comandate de controlerele logice mici i acesta este motivul pentru
care textele din capitolele:
2. Cerinele din partea studenilor nainte de lucrul la laboratorul PLC bazat pe
web
3. Obiectivele educaionale
4. Arhitectura laboratorului virtual PLC bazat pe web
6. Cum s se lucreze n laboratorul virtual
7. nceperea unui nou proiect
8. Dezvoltarea programului
sunt la fel i nu le repetm aici. Pentru orice detalii referitoare la aceste capitole,
cititorului i se cere s le studieze n modulul nr. 4.5. Procesul tehnologic diferit
impune diferite aranjamente HW i accese diferite n dezvoltarea programului. Acesta
este motivul pentru care sunt descrise n continuare numai diferenele existente n
diferite procese tehnologice.
Studenii sunt capabili s verifice corectitudinea algoritmului de comand prin
modelul virtual al procesului tehnologic care este conectat la intrrile i ieirile reale
ale PLC. Modelul de laborator a proceselor tehnologice servete numai la munca n
laborator. Dup verificarea programului de comand, studenii sunt pregtii s
lucreze cu modelul fizic real al proceselor tehnologice din laborator.
Experimentul ruleaz n Web-based PLC Laboratory for Technological Processes
Control (laboratorul PLC bazat pe web al comenzii proceselor tehnologice), care este
pstrat la Universitatea Tehnic din Kosice, Departamentul de Mecatronic
Electric i de Inginerie Industrial, Slovacia.
2. Modelul transportoarelor
Modelul de laborator const din dou transportoare cu band, un transportor elicoidal
i dou containere pentru material n vrac (Fig. 1).
- -
4.6 Sistem de Transportoare Controlate de SLC
- 155 -
Fig. 1 Structura sistemului controlat i locul de munc cu modelul de laborator
Modul de operare al modelului de laborator:
1. Modul manual operatorii pot porni i opri transportoarele arbitrare i
recipientul de basculare i pot observa vizual procesul tehnologic i nivelul
materialului din containere. Modelul virtual permite vizualizarea procesului
tehnologic, dar nu permite manipularea actuatoarelor individuale.
2. Modul automat n modelul virtual utilizatorul poate porni i opri
transportoarele i deschide sau nchide recipientele de basculare individuale.
Programul de comand dezvoltat ar trebui s asigure procesul tehnologic adecvat.
3. Descrierea procesului tehnologic
Transportorul elicoidal transport materialul n vrac din containerul nr. 1 n
containerul nr. 2. Transportoarele cu band transport materialul n direcie opus, -
adic din containerul nr. 2 n containerul nr. 1. Fiecare container conine un recipient
de basculare care este deschis i nchis de o bobin electromagnetic. Deschiderea
recipientului de basculare cauzeaz turnarea materialului n transportor.
Modelul de laborator real a trei transportoare interconectate este reprezentat n fig. 2.
- -
4.6 Sistem de Transportoare Controlate de SLC
- 156 -
Fig. 2 Modelul de laborator cu trei transportoare vedere lateral i de sus
Aranjamentele detaliate mecanice indic transportul materialului n vrac cu ajutorul
transportorului cu band nr. 2 (sus stnga), apoi acesta este turnat n transportorul cu
band nr. 1 (sus dreapta), apoi n containerul nr. 2 (jos dreapta), de unde este
transportat cu ajutorul transportorului elicoidal (jos mijloc) n containerul nr. 1 (jos
stnga), etc. - circulaia materialului n vrac ncepnd din nou.
n interiorul fiecrui transportor exist patru senzori cu LED diode ale nivelului de
nlime care indic diferite nivele de umplere a containerului: 25 %, 50 %, 75 %
i 100 % din volumul total al containerului. Sarcina lor const n informarea
operatorilor cu privire la nlimea materialului n vrac din rezervor. Senzorii de nivel
opereaz pe principiul fotorezistorului. Acesta este motivul pentru care ambele
rezervoare sunt luminate de sus. Dac senzorul nu este acoperit de un material, el este
luminat i PLC primete unitatea logic la intrarea sa. Dac senzorul este acoperit de
material, el nu este luminat, desigur i PLC devine zero logic la intrarea sa.
Operaiile transportatoarelor:
Transportul materialului n vrac din containerul nr. 1 n containerul nr. 2 prin
transportorul elicoidal are loc n situaia n care recipientul basculant nr. 1 al
containerului nr. 1 este pornit.
Transportorul cu band ncepe s funcioneze cnd recipientul basculant al
containerului nr. 2 este pornit.
Toate transportoarele sunt acionate de motoare de c.c. mici prin intermediul roilor
dinate.
4. Descrierea sistemului de comand
- -
4.6 Sistem de Transportoare Controlate de SLC
- 157 -
Sistemul de comand const din controlerul logic programabil (PLC) SIMATIC 300.
Const din procesorul CPU 313C-2DP i cartela de intrri/ ieiri digitale binare,
adiional SM323 DI 16/DO 16x24V/0.5A. Comunicarea dintre PC i PLC este
asigurat de bara MPI (Multi Point Interface (interfa multipunct)).
Descrierea intrrilor i ieirilor necesare dezvoltrii programului de comand pentru
modelul de laborator este dat n tabelul de mai jos. n manualul de pe internet cu
privire la experiment sunt prezentate i locaiile de memorie corespunztoare.
Intrri digitale Ieiri digitale
Stop (oprire) total
Rularea transportorului elicoidal
Deschiderea recipientului basculant
nr. 1
Rularea transportorului cu band nr. 1
Rularea transportorului cu band nr. 1
Deschiderea recipientului basculant
nr. 2
Senzorul nivelului de nlime,
containerului nr. 1, separat pentru
depozitare 25 %, 50 %, 75 %, 100 %
Senzorul nivelului de nlime,
containerul nr. 2, separat pentru
depozitare 25 %, 50 %, 75 %, 100 %
Stop (oprire) total
Modul automat
Starea transportorului elicoidal
Starea bobinei recipientului basculant
nr. 1 (nr. 2)
Rularea transportorului cu band
Nr. 1 (Nr. 2)
LED care indic nivelul de depozitare
al containerului nr.2 separat pentru
depozitare: 25 %, 50 %, 75 %, 100
%
LED care indic nivelul de depozitare
al containerului nr. 1 separat
pentru depozitare: 25 %, 50 %, 75
%, 100 %
- -
4.6 Sistem de Transportoare Controlate de SLC
- 158 -
5. Sarcini
Scopul comenzii
Scopul comenzii const n asigurarea rulrii corecte a proceselor tehnologice, conform
cu starea unitilor actuatoare:
- Transportorul este pornit/ oprit (adic, ruleaz/ se oprete) i
- Recipientul basculant este pornit/ oprit (adic, este deschis/ nchis).
Sarcina 1:
Dezvoltai un program de comand care valideaz:
1. Rularea transportorului elicoidal, dac recipientul basculant nr. 1 este pornit
(i transportorul cu band se afl n stare de repaus).
2. Rularea ambelor transportoare cu band, dac recipientul basculant nr. 2 este
pornit
(i transportorul elicoidal se afl n stare de repaus).
3. Rularea tuturor celor trei transportoare, dac amndou recipientele basculante: nr.
1 i nr. 2 sunt pornite.
Sarcina 2:
Dezvoltai un program de comand care valideaz:
1. Micarea materialului de la containerul nr. 1 la containerul nr. 2, dac nivelul
materialului n containerul nr. 1 este mai mare ca 50%.
Procesul se oprete dac nivelul materialului n containerul nr. 2 este mai mic
dect 25%.
2. Micarea materialului n containerul nr. 1, dac nivelul materialului n containerul
nr. 2 este mai mare ca 75 %.
Procesul se oprete dac nivelul materialului n containerul nr. 2 este mai mic
dect 50 %.
6. Material de studiu adiional
[1] G. Dunning, Introduction to Programmable Logic Controllers, Delmar Thomson Learning
[2] F. D. Petruzella, Programmable Logic Controllers, McGraw-Hill
[3] W. Bolton, Programmable Logic Controllers, Fourth Edition, Newnes
[4] S. P. Tubbs, Programmable Logic Controller (PLC) Tutorial, Stephen Philip Tubbs
[5] R. Cox, Technician's Guide to Programmable Controllers, Delmar Cengage Learning
[6] K. Collins, PLC Programming for Industrial Automation, Exposure Publishing
[7] Siemens, Manual Siemens S7-300, Edition 2003
S-ar putea să vă placă și
- Fizica fenomenologică: Compendiu - Volumul 1De la EverandFizica fenomenologică: Compendiu - Volumul 1Evaluare: 4.5 din 5 stele4.5/5 (2)
- Circuite de Curent ContinuuDocument396 paginiCircuite de Curent ContinuuMadalina Gabriela HerisanuÎncă nu există evaluări
- Atestat - Sursa de Tensiune Stabilizata1Document21 paginiAtestat - Sursa de Tensiune Stabilizata1eliboyzz80% (5)
- Proiect Bobine, CondensatoareDocument24 paginiProiect Bobine, Condensatoareiulian_bÎncă nu există evaluări
- Licenta UmcDocument72 paginiLicenta UmcLaurian ŞtefanÎncă nu există evaluări
- Desen Tehnic Si Infografica IIDocument159 paginiDesen Tehnic Si Infografica IItotocs100% (3)
- 29 Electronica Analogica Curs PDFDocument89 pagini29 Electronica Analogica Curs PDFCata Catalin100% (1)
- Directie AsistataDocument31 paginiDirectie AsistataroniyyÎncă nu există evaluări
- Dispozitive Electron Ice Si Circuite AnalogiceDocument85 paginiDispozitive Electron Ice Si Circuite Analogiceosiris1969100% (1)
- 29 Electronica Analogica CursDocument89 pagini29 Electronica Analogica CursadicaracaleanuÎncă nu există evaluări
- Pe 134Document59 paginiPe 134fl1609Încă nu există evaluări
- Proiect Amplificator de Tensiune Cu Reactie Negativa STD Cap MUJA ROBERT PDFDocument38 paginiProiect Amplificator de Tensiune Cu Reactie Negativa STD Cap MUJA ROBERT PDFIoana CișmașÎncă nu există evaluări
- Lucrari de Intretinere in Instalatii ElectromecaniceDocument26 paginiLucrari de Intretinere in Instalatii ElectromecaniceNeagoeDaniel0% (1)
- NTE 001 2003 - Normativ Privind Izolatia Si Protectia Instalatiilor Electroenergetice Impotriva SupratensiunilorDocument106 paginiNTE 001 2003 - Normativ Privind Izolatia Si Protectia Instalatiilor Electroenergetice Impotriva SupratensiunilorIeremeiov VladimirÎncă nu există evaluări
- Electronica PutereDocument136 paginiElectronica PutereAna Hazi100% (2)
- Indrumar AE v4 PDFDocument202 paginiIndrumar AE v4 PDFLaurian Ştefan100% (2)
- ST31 Stalpi Metalici ZabrelitiDocument13 paginiST31 Stalpi Metalici Zabrelitiarraya2Încă nu există evaluări
- Tranzistorul BipolarDocument21 paginiTranzistorul BipolarSmil3y89Încă nu există evaluări
- Nte 003 04Document121 paginiNte 003 04mc_dragos100% (3)
- Dispozitive ElectriceDocument74 paginiDispozitive ElectriceIurasog Mihail-Lucian100% (1)
- Izolatoare Si Lanturi de Izolatoare Compozite PDFDocument108 paginiIzolatoare Si Lanturi de Izolatoare Compozite PDFPeTru MocanÎncă nu există evaluări
- Izolatoare Si Lanturi de Izolatoare Compozite PDFDocument108 paginiIzolatoare Si Lanturi de Izolatoare Compozite PDFPeTru MocanÎncă nu există evaluări
- Contactoare Electromagnetice de Joasa TensiuneDocument19 paginiContactoare Electromagnetice de Joasa TensiuneAlexandru FrățilăÎncă nu există evaluări
- Laborator Pec Studiul Fenomenului de ScurtcircuitDocument105 paginiLaborator Pec Studiul Fenomenului de ScurtcircuitSara PotterÎncă nu există evaluări
- Electronica de Putere Diacul Si TriaculDocument10 paginiElectronica de Putere Diacul Si TriaculGrecu Mircea100% (1)
- Indrumar AE v4Document202 paginiIndrumar AE v4Madalin StanciuÎncă nu există evaluări
- HVDCDocument27 paginiHVDCMarica CristiÎncă nu există evaluări
- Convertorul BoostDocument5 paginiConvertorul BoosttyutyuÎncă nu există evaluări
- Laborator ElectronicaDocument44 paginiLaborator ElectronicaGmd28100% (6)
- Proiect Huzum George Alexandru Clasa A13-A ABDocument49 paginiProiect Huzum George Alexandru Clasa A13-A ABSCrewsoft RyEnergyÎncă nu există evaluări
- DorinDocument223 paginiDorin68ionutÎncă nu există evaluări
- Studiul Şi Analiza Funcţionării Unui Redresor Monoalternanta Monofazat 220v24v1aDocument17 paginiStudiul Şi Analiza Funcţionării Unui Redresor Monoalternanta Monofazat 220v24v1aAndrei Danciu100% (1)
- Redresoare-Dispozitive Redresoare-Caracteristici-Scheme de Redresoare Si AplicatiiDocument30 paginiRedresoare-Dispozitive Redresoare-Caracteristici-Scheme de Redresoare Si AplicatiiDynoCrÎncă nu există evaluări
- Cursuri AACCE PDFDocument193 paginiCursuri AACCE PDFXelaÎncă nu există evaluări
- Convertor Rezistență-TensiuneDocument10 paginiConvertor Rezistență-TensiuneAndrei - Cristian SIMIONÎncă nu există evaluări
- Lab1 MasurariSiSemnale v2R1 17martie23 MIHDocument54 paginiLab1 MasurariSiSemnale v2R1 17martie23 MIHTeddy TeddyÎncă nu există evaluări
- Dispozitive ElectroniceDocument3 paginiDispozitive ElectroniceGridan GheorgheÎncă nu există evaluări
- Circuit RLC PhETDocument1 paginăCircuit RLC PhETTokra2007Încă nu există evaluări
- Proiect EADocument27 paginiProiect EAfereseÎncă nu există evaluări
- Incercare TrafDocument13 paginiIncercare TrafnaiditzaÎncă nu există evaluări
- Subiecte Examen de StatDocument6 paginiSubiecte Examen de StatKimberly WilsonÎncă nu există evaluări
- Masurarea Int Si Ten ElectriceDocument17 paginiMasurarea Int Si Ten ElectriceGeorge AndroneÎncă nu există evaluări
- Normativ PE134-2 1996 Curenti de ScurtcircuitDocument39 paginiNormativ PE134-2 1996 Curenti de ScurtcircuitMARIUS StoicaÎncă nu există evaluări
- Proiect ElectroalimentareDocument33 paginiProiect ElectroalimentareCatalina Alexandra BranÎncă nu există evaluări
- Laborator CS1 Lucas NuelleDocument74 paginiLaborator CS1 Lucas NuelleRazvan CatalinÎncă nu există evaluări
- Laborator ElectronicaDocument45 paginiLaborator ElectronicaWhipzÎncă nu există evaluări
- Men Final4Document76 paginiMen Final4petregeorge22Încă nu există evaluări
- Procese Tranzitorii ElectromagneticeDocument61 paginiProcese Tranzitorii ElectromagneticeCodreanu Petru100% (1)
- Simularea Comportamentului LED-urilor În Domeniul Frecvență Și În Domeniul TimpDocument6 paginiSimularea Comportamentului LED-urilor În Domeniul Frecvență Și În Domeniul TimpMetea MălinaÎncă nu există evaluări
- Proiect EADocument22 paginiProiect EAVlad OprescuÎncă nu există evaluări
- Culegere CIADocument13 paginiCulegere CIAChira_Ciprian_6245Încă nu există evaluări
- Pogora V. Procese Tranzitorii În Sistemele de Alimentare Cu Energie ElectricăDocument69 paginiPogora V. Procese Tranzitorii În Sistemele de Alimentare Cu Energie ElectricăНиколай СырбуÎncă nu există evaluări
- Referat Electronica DigitalaDocument13 paginiReferat Electronica DigitalaAna-Maria TanasoaiaÎncă nu există evaluări
- Proiect Eie CopieDocument7 paginiProiect Eie CopiePojar AlinaÎncă nu există evaluări
- Izolatie LEADocument29 paginiIzolatie LEAPeTru MocanÎncă nu există evaluări
- Genera To Are Ale - Manual de OperareDocument17 paginiGenera To Are Ale - Manual de OperareCatalin DanailaÎncă nu există evaluări
- Calculul Contragreutatilor Functie de Unghiul de Inclinare PDFDocument6 paginiCalculul Contragreutatilor Functie de Unghiul de Inclinare PDFPeTru MocanÎncă nu există evaluări
- IEAC5NDocument7 paginiIEAC5Ndenwer3Încă nu există evaluări
- Proiectare LES PDFDocument146 paginiProiectare LES PDFEpsilonnnÎncă nu există evaluări
- Izolatoare 110kv 220kv 400kvDocument18 paginiIzolatoare 110kv 220kv 400kvPeTru MocanÎncă nu există evaluări
- Meniu Banchet - 1Document1 paginăMeniu Banchet - 1PeTru MocanÎncă nu există evaluări
- Instalarea XP de Pe USB Boot StickDocument1 paginăInstalarea XP de Pe USB Boot StickPeTru MocanÎncă nu există evaluări
- Noul Cod RutierDocument50 paginiNoul Cod RutierRotaru IrinaÎncă nu există evaluări
- GHID LICENTA 2013 2014 ElectromecanicaDocument25 paginiGHID LICENTA 2013 2014 ElectromecanicaPeTru MocanÎncă nu există evaluări
- SRE Tema ProiectDocument9 paginiSRE Tema ProiectPeTru MocanÎncă nu există evaluări
- RezistivitateaDocument2 paginiRezistivitateaVlad Banulescu100% (1)
- Noul Cod RutierDocument50 paginiNoul Cod RutierRotaru IrinaÎncă nu există evaluări
- Lucrare 1.1 Schimb TermicDocument1 paginăLucrare 1.1 Schimb TermicPeTru MocanÎncă nu există evaluări
- Uc AcumDocument13 paginiUc AcumPeTru MocanÎncă nu există evaluări
- L 10Document2 paginiL 10PeTru MocanÎncă nu există evaluări
- Tabel Calcule Proiect - SREDocument2 paginiTabel Calcule Proiect - SREBo BogdanÎncă nu există evaluări
- Noul Cod RutierDocument50 paginiNoul Cod RutierRotaru IrinaÎncă nu există evaluări
- Lista Tutori Si Decani de An 2013 - 2014 PDFDocument1 paginăLista Tutori Si Decani de An 2013 - 2014 PDFPeTru MocanÎncă nu există evaluări
- Prestatii Persoane Cu HandicapDocument4 paginiPrestatii Persoane Cu HandicapPeTru MocanÎncă nu există evaluări