Documente Academic
Documente Profesional
Documente Cultură
Curs 5 - Dezvoltare Tehnologica Si Tehnologii Educationale
Încărcat de
P_adelin6274Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Curs 5 - Dezvoltare Tehnologica Si Tehnologii Educationale
Încărcat de
P_adelin6274Drepturi de autor:
Formate disponibile
i
Cuprins
A - Activit t i de predre
A1 - Sisteme industriale moderne. Tehnologii educaionale
Sisteme industriale moderne. Evoluia n dezvoltarea tehnologic.
Platforme mecatronice educaionale (hardware).
Instrumente software pentru dezvoltarea aplicaiilor industriale.
A2 - Sisteme de acionare pentru aplicaii industriale
Studiu comparativ ntre sistemele electrice hidraulice - pneumatice.
Structura circuitelor hidraulice i pneumatice.
A3 - Controlul sistemelor industriale I
Sisteme de control industriale de tip PLC.
Structur, limbaje standardizate.
Limbajul industrial LDR (Ladder Diagram).
Operanzi. Operatori. Instruciuni.
A4 - Controlul sistemelor industriale II
Proiectarea Logic Structurat.
Metoda Biilor Secveniali.
Metoda Grafcet.
A5 - Tehnologii industriale
Tehnologii industriale de dezvoltare a aplicaiilor.
Medii de simulare i dezvoltare a aplicaiilor industriale.
Dezvoltarea (simularea) aplicaiilor industriale.
Platforme educaionale: Mechlab, MPS i alte platforme educaionale.
ii
B Aplict ii Industrile
B1 - Platforme mecatronice n educaie i formare
Platforme mecatronice educaionale (hardware).
Instrumente software pentru dezvoltarea aplicaiilor industriale.
Dezvoltarea circuitelor de acionare hidraulice i pneumatice.
Circuite de acionare specifice: simulare utiliznd FluidSIM-H i FluidSIM-P.
Implementarea real a circuitelor utiliznd echipamentele transparente.
Aplicaii demonstrative.
B2 - Sisteme de acionare pentru aplicaii industriale
Sisteme electropneumatice. Sisteme electrohidraulice. Sisteme electrice. Servosisteme.
Circuite specifice de control a vitezei/forei.
Proiectarea asistat a circuitelor servohidraulice i servopneumatice (FluidSIM).
Implementarea real a circuitelor pe standurile experimentale.
B3 - Controlul sistemelor industriale I
Aplicaii elementare de programare a sistemelor modulare de producie.
Medii de dezvoltare a aplicaiilor. Limbaje de programare. Proiectarea aplicaiilor.
Limbajul Ladder Diagram - operanzi (SBO,MBO), operatori, instruciuni.
Controlul micrii in sistemele electropneumatice. Diagrame funcionale.
Temporizatore (TP, TON, TOFF). Numrtoare.
B4 - Controlul sistemelor industriale II
Proiectarea Logic Structurat .
Dezvoltarea aplicaiilor industriale (aplicaii pe PLC-uri).
B5 - Tehnologii industriale
Tehnologii industriale de dezvoltare a aplicaiilor.
Simularea aplicaiilor industriale.
Dezvoltarea de aplicaii industriale pe platforme mecatronice.
Controlul parametrilor micrii n servosisteme pneumatice, hidraulice, electrice.
Utilizarea controlerelor de tip PLC n programarea aplicaiilor.
Aplicaii demonstrative.
iii
Bibliogrfie
Orgnizre ctivit t ilor
Zile/Activiti A Activiti de predare B Aplicaii Industriale
Ziua 1 A1 B1
Ziua 2 A2 B2
Ziua 3 A3 B3
Ziua 4 A4 B4
Ziua 5 A5 B5
Ziua 6 Evaluare
iv
A1 - Pag 1
Sisteme Industriale Moderne
Tehnologii Educaionale
1. Sisteme industriale moderne. Evoluia n dezvoltarea tehnologic
2. Platforme mecatronice educaionale
3. Instrumente software pentru dezvoltarea aplicaiilor industriale
Sisteme industriale moderne. Evoluia n dezvoltarea tehnologic
Evoluia omenirii a fost nsoit de o dezvoltare lent a uneltelor, dispozitivelor i sistemelor create
i realizate de om, ncepnd din paleolitic si pn n secolul 18, cnd odat cu inventarea mainii cu abur
(James Watt 1788), care a marcat nceputul revoluiei industriale, sistemele tehnice au cunoscut o
evoluie rapid. Maina cu abur s-a constituit ntr-una dintre primele borne ale procesului de nlocuire a
muncii fizice, prestate de oameni i animale, cu lucrul mecanic efectuat de maini. Cteva repere
importante de-a lungul acestui drum:
1775 - prima main orizontal de gurit i alezat evile de tun (englezul John Wilkinson);
1784 ciocanul mecanic cu abur;
1795 presa cu transmisie hidraulic;
1797 primul strung cu crucior i ppu mobil, acionate de un ax elicoidal;
vaporul cu aburi (nceputul secolului 19);
locomotiva cu aburi (mijlocul secolului 19).
Pe parcursul secolului al 19-lea apar i se dezvolt motoarele cu ardere intern, ca rezultat al
preocuprii unor inventatori de geniu de a realiza mijloace de transport rutiere:
1807 brevet pentru un motor cu un cilindru vertical, cu funcionare cu gaz i cu aprindere cu
ajutorul unei scntei electrice;
1872 invenia motorului cu benzin i supape laterale motorul Otto;
1887 motorul Daimler, cu ardere intern, cu doi cilindri n V, la care aprinderea combustibilului
avea loc la fiecare rotaie a arborelui (capacitatea cilindrica de 1,5 l; puterea de 7,5 CP).
A1
1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 2
Caracteristica esenial a sistemelor tehnice de pn n jurul anilor 1900 este aceea c acestea erau
pur mecanice. Mecanica pura a permis realizarea unor adevrate bijuterii tehnice, cum ar fi precursorul
genial al calculatorului electronic, reprezentat de maina de calcul a lui Charles Babbage, sau maina de
scris mecanic; s-au pus nsa n eviden i limitele acestor sisteme.
Germenii unei ere noi apar odat cu dezvoltarea motoarelor electrice motorul de curent continuu
n 1870 i cel de curent alternativ n 1889, care au permis, realizarea, la nceputul secolului 20, a unor
sisteme mecanice cu acionare electric (pompe, maini unelte etc.). Electrotehnica a permis i saltul la
realizarea unor sisteme mecanice cu control automat, bazate pe relee electrice, regulatoare PI,
amplificatoare electrice, avnd ca exponeni avioanele, mainile-unelte, turbinele cu aburi, automobilele.
Perioada de dup cel de-al doilea rzboi mondial este caracterizat prin realizri tiinifice i
strpungeri tehnologice remarcabile: primul calculator electronic numeric n 1945, tranzistorul cu germaniu
n 1948, cel cu siliciu n 1952, tiristorul n 1958, primul circuit integrat n 1959, laserul etc.
n 1953 la Massachussets Institute of Technology (M.I.T.) s-a realizat i s-au fcut demonstraii cu o
main de frezat cu comand numeric. Ca nceput al mainilor unelte cu comand numeric poate fi
considerata utilizarea benzii perforate n rzboiul de esut automat (de ctre Jaquard) i n pianola mecanic
cu program. Un rol important n perfecionarea acestor maini l-a avut utilizarea calculatorului n locul
benzii perforate, ajungndu-se la comanda numeric, cu ajutorul calculatorului, a mainilor unelte.
La nceputul anilor 1960 sunt realizai i primii roboi industriali. Fabricarea i utilizarea roboilor a
fost facilitat de rezolvarea anterioar a unor probleme tehnice, indispensabile pentru funcionarea
roboilor:
problema manipulrii pieselor la distan, cu ajutorul mecanismelor articulate, denumite
telemanipulatoare;
o dezvoltarea telemanipulatoarelor a fost impus de necesitatea manipulrii materialelor
radioactive, extrem de nocive pentru organismele vii, n procesul utilizrii energiei nucleare.
Astfel c:
1947 - a fost construit primul telemanipulator cu servo-acionare electric, n care
operatorul uman nu controla fora de prindere;
1948 - a fost introdus legtura invers (feed-back), realizndu-se astfel
telemanipulatorul cu bucl nchis.
fabricarea manipulatoarelor cu operator uman a implicat rezolvarea unor probleme eseniale
pentru proiectarea i realizarea unui robot:
o modelarea cu ajutorul mecanismelor a micrilor braului i antebraului omului
(mecanisme de poziionare);
o modelarea cu ajutorul mecanismelor a micrilor de orientare specifice ncheieturii minii
omului (mecanisme de orientare);
o modelarea micrilor degetelor minii, specifice operaiilor de prindere.
problema automatizrii mainilor unelte prin intermediul comenzii numerice a permis stpnirea
comenzii incrementale a micrilor i a poziionrii de mare precizie, prin dezvoltarea de servo-
motoare, servo-comenzi i senzori de poziie/deplasare;
problema automatizrii calculelor i a controlului cu ajutorul calculatoarelor electronice.
Iat cteva repere semnificative n evoluia roboticii:
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 3
1961 instalarea primului robot industrial UNIMATE la General Motors. i n urmtoarele decenii
industria automobilului a fost fora motrice pentru producia roboilor industriali. Astfel, n 2002, n
Germania erau 120 de roboti la fiecare 10.000 de angajai, dar n industria automobilului proporia
era de 1 robot la 10 muncitori productivi.
1963 Cercettorii de la Rancho Los Amigos Hospital din California au construit Rancho Arm
pentru sprijinirea persoanelor handicapate. Avea 6 articulaii, dispunea de gradele de mobilitate ale
minii umane i a deschis drumul spre construirea roboilor antropomorfi.
studentul n construcia de maini, Victor Scheinman, a realizat la Stanford Artificial Intelligence
Laboratory, robotul Stanford pentru microchirurgie. Avea 6 grade de mobilitate i era primul robot
conceput pentru comanda cu calculatorul. A fost precursorul unor roboti industriali remarcabili, ca
PUMA (Programmable Universal Manipulator for Assembly), robotul cu cel mai mare succes de
pia pn n prezent.
1979 Robotul mobil Stanford Cart a reuit prima parcurgere a unei incinte mobilate cu scaune. Se
baza pe o camer video, montat pe o sanie, i i stabilea drumul pe baz de grafuri i algoritmi de
cutare. Primele maini mobile reprezentative au fost nsa broatele estoase Elsie i Elmer ale
englezului Grey Elmer, n 1950, capabile s identifice o priz electric i s-i ncarce bateriile.
1973 La Universitatea Waseda din Tokyo a fost realizat primul robot umanoid n mrime natural
Wabot-1. Japonezii sunt cei mai ferveni susintori ai dezvoltrii unor roboi cu aspect umanoid,
care s fie acceptai mai uor ca parteneri n servicii, munci casnice, ajutorarea persoanelor
handicapate. Exemple semnificative: roboii P3 (Honda) i Asimo (Advanced Step in Innovative
Mobility). Acesta din urma, realizat n 2001, are o nlime de 1,20 m, o greutate de 43 kg, iar prin
modificarea centrului su de greutate se poate deplasa i n curbe.
doi roboi umanoizi renumii de la M.I.T. Kismet (Soarta), are buze de cauciuc, urechi rozalii,
care arat ca dou erveele mpturite, ochi mari, n care sunt montate camere miniaturale i
poate vedea, auzi i vorbi cu ajutorul unui sintetizator; Cog (Cognition = Cunoatere), este constituit
dintr-un trunchi de robot, care poate prinde obiecte i le poate aduce n dreptul celor doi ochi,
materializai prin dou camere video.
Cteva dintre realizrile din domeniul roboticii par a fi desprinse din science-fiction i ele nu ar fi
fost posibile fr dezvoltarea spectaculoas a tehnicii de calcul i, n special, a microelectronicii, care este un
pilon de baz al sistemelor. n finalul acestui paragraf se vor puncta cteva dintre principalele etape ale
dezvoltrii tehnicii de calcul.
Prelucrarea automat a informaiilor a fost revoluionat de apariia i dezvoltarea calculatoarelor
electronice numerice. Prima generaie a fost realizata cu tuburi electronice, primul calculator din aceast
generaie fiind ENIAC (Electronical Numerical Integrator and Calculator), construit ntre 1942-1946 la
Universitatea Pennsylvania.
A urmat generaia a doua, cu tranzistoare, ntre anii 1950-1960, pentru ca naterea
microelectronicii s genereze salturi revoluionare, marcate de urmtoarele etape semnificative:
1959 - anul de natere a microelectronicii; primul circuit integrat (TEXAS INSTRUMENTS);
1971 - producerea primului microprocesor de 4 bii - INTEL-4004;
1974 - apariia microprocesoarelor de 8 bii - INTEL-8080;
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 4
1978 producerea primului microcontroler;
1981 - primul calculator personal IBM PC-XT;
1985 - lansarea sistemelor software AUTOCAD, dBASE III, IV i a unor noi limbaje de programare de
nivel nalt: PASCAL, C;
1986 - limbaje de programare destinate rezolvrii problemelor de inteligen artificial: LISP,
PROLOG; procesare n limbaj natural;
1987- explozie tehnologic n arhitectura hardware lansarea calculatoarelor echipate cu hard-
disk-uri.
Alte etape importante parcurse din 1987 i pn n prezent:
mrirea continu a capacitii de stocare a discurilor hard;
dezvoltarea tehnicilor de procesare n paralel;
introducerea discurilor optice read/write;
utilizarea de microprocesoare din ce n ce mai performante;
dezvoltarea unor noi sisteme de operare, cu performante superioare;
mrirea capacitii memoriei interne;
creterea vitezei de prelucrare;
extinderea posibilitilor de lucru n mod grafic etc.
Succinta prezentare a evoluiei sistemelor tehnice, de la sisteme pur mecanice la sisteme
mecatronice, sintetizat i n figura 1.3, permite evidenierea ctorva concluzii:
I. integrarea electronicii i a tehnicii de calcul a condus la simplificarea substanial a componentelor
mecanice i la sisteme mai ieftine;
II. pri mecanice au fost nlocuite cu componente electronice, mai ieftine, mai fiabile i mai uor de
ntreinut, ntruct pot facilita auto-diagnoza;
III. aceste sisteme sunt mai precise, ntruct precizia nu se bazeaz pe rigiditatea i stabilitatea
mecanic, ci pe sisteme electronice de msurare i reglare;
IV. simplificarea construciei mecanice a fost facilitat i de comanda descentralizat, cu ajutorul
microcalculatoarelor, a acionrilor electrice, ca, de exemplu, la maini de scris, maini de cusut,
manipulatoare cu mai multe cuple;
V. n perspectiva unor construcii mai uoare, s-au realizat sisteme relativ elastice, cu o amortizare
mecanic redus, dar la care o comand cu reacie adecvat, bazat pe electronic, senzori i
actuatori adecvai, asigur o amortizare electronic. Exemple: roboi elastici, transmisii de putere
elastice, macarale uriae, sisteme hidraulice, conducte i construcii n spaiul cosmic;
VI. introducerea unor sisteme de reglare pentru poziie, vitez, for etc. permite nu numai meninerea
n limite rezonabile de precizie a mrimilor programate, dar i obinerea unei comportri quasi-
liniare, chiar daca sistemul mecanic comandat este neliniar.
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 5
Tabel 1. Evoluia tehnologic
Sisteme pur mecanice Pn n 1900
1788 maina cu abur;
1872 motorul Otto;
1887 motorul Daimler; maina
de calcul a lui Babbagge; maina
de scris mecanic.
Sisteme mecanice cu acionare
electric
1920
Maini unelte;
Pompe.
Sisteme mecanice cu control automat Anii 1930
Avioane, Automobile,
Turbine cu abur, Maina de
scris electric.
Sisteme mecanice cu:
control electronic analogic;
control secvenial;
control numeric.
ncepnd cu anii 1950 pna
la mijlocul anilor 1980
Lifturi cu control automat;
Maini unelte cu comand
numeric;
Roboi industriali;
Periferice de calculator.
Sisteme mecatronice
integrare mecanic & electronic &
tehnic de calcul Sinergie;
software-ul determin funciile;
noi instrumente de proiectare.
De la mijlocul anilor 1980
Roboi mobili;
Linii flexibile;
Controlul electronic al
automobilului (ABS, ESP);
Uniti CD-ROM.
1870 motorul de c.c.
1889 motorul de c.a.
Relee electrice
Amplificatoare
Regulatoare
1948, 1952 - tranzistorul
1955 - tiristorul
1959 circuitul integrat
1971 - microprocesorul
1878 - microcontrolerul
1981 PC-ul
magistrale de proces
noi senzori i actuatori
integrarea componentelor
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 6
Clasificarea sistemelor mecatronice
La sfritul anilor 1970, Societatea Japonez pentru promovarea industriei de maini (JSPMI) a
clasificat produsele mecatronice n patru categorii:
1. Clasa I Primele produse mecanice cu electronic ncorporat n scopul mbuntirii
funcionalitii. Exemple sugestive: maini unelte controlate numeric i maini de prelucrare cu
vitez variabila.
2. Clasa II Sisteme mecanice tradiionale cu electronic semnificativ ncorporat. Interfeele
externe cu utilizatorul rmn nemodificate. Exemple sugestive: maina de brbierit automat i
sistemele de fabricare automate.
3. Clasa III Sistemele care menin funcionalitatea sistemelor mecanice tradiionale, dar
mecanismele interioare sunt nlocuite cu cele electronice. Exemplu sugestiv: ceasul digital.
4. Clasa IV Produse ce nglobeaz tehnologii mecanice i electronice prin integrare sinergetic.
Exemple sugestive: fotocopiatoare, usctoare inteligente, roboi de buctrie i cuptoare automate.
Performanele produselor electromecanice atinse n cadrul fiecrei clase, sunt strns legate de
progresul tehnologic din domeniile de control al sistemelor, microcontrolerelor i a puterii de calcul.
Startul produsele aferente clasei a I-a a fost dat de tehnologia servo, electronica de putere i teoria
de control a sistemelor.
Produsele aferente clasei a II-a au prins via odat cu apariia primelor calculatoare, dispozitivelor
de memorie i posibilitatea de realizare a circuitelor de comand.
Produsele clasei a III-a ncep s surprind conceptul de integrare ntr-un mod tot mai vizibil,
sistemele mecanice fiind tot mai mult nlocuite cu microprocesoare i circuite integrate.
Produsele clasei a IV-a au marcat nceputul adevratelor sisteme mecatronice, prin integrarea
sistemelor electronice cu cele mecanice. A nceput dup 1970 cnd Intel Corporation a lansat pe pia
microprocesoarele, dispozitive electronice care puteau integra sistemele mecanice cu cele electronice.
Practic tot ceea ce numim produs de nalta tehnicitate este produs mecatronic. Automobilul
modern, roboii, tehnica de calcul, tehnica de telecomunicaii, aparatura biomedical, sistemele de
transport inteligent, aparatura de cercetare, aparatura electrocasnic, aparatura cine-foto i audio-video,
mainile agricole moderne etc., sunt exemple reprezentative de produse mecatronice.
Ca i concluzie final, este evident c orice definiie a mecatronicii am alege, mecatronica modern
implic procesarea informaiei ca i ax central.
ncorporarea microcontrolerelor pentru modularea puterii mecanice i adaptarea sistemului la
diferite puncte de funcionare sunt esena mecatronicii moderne i produselor inteligente.
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 7
Sisteme mecatronice reprezentative
Mecatronica atrage din ce n ce mai mult atenia. Termenul este tot mai des folosit ntr-o gam tot
mai larg de produse i aplicaii inginereti.
Termenul de mecatronic se refer la mbinarea sinergetic dintre ingineria de precizie, controlul
electronic i gndirea integratoare n procesul de proiectare al produselor i proceselor de fabricaie. Este un
subiect cu caracter interdisciplinar ce se bazeaz pe discipline de baz inginereti dar n acelai timp include
discipline neasociate n mod direct cu disciplinele de baz.
Conceptul de baz n aceast definiie este ideea de abordare a sistemului ca ntreg. Acest lucru
implic proiectarea i optimizarea sistemului ca un ntreg i nu ca o secven incremental de pai. Totui,
nu orice produs realizat prin intermediul conceptului mai sus amintit face subiectul unui produs mecatronic.
n cadrul proiectrii produselor mecatronice este esenial munca n echip. Specialiti din domeniul
mecanic, electric, control i tiina calculatoarelor trebuie s coopereze n cadrul unei echipe n toate fazele
de proiectare pentru a converge la o soluie integrat.
De la gramofon la CD Player
Gramofonul este unul dintre primele dispozitive de redare a sunetelor. Ca medii de stocare se foloseau
discurile de vinil. Discurile de vinil erau clasificate n funcie de viteza lor de redare, viteza maxim fiind de
78RPM (rotaii/minut). La fel ca i n prezent, se punea problema meninerii vitezei de redare la o valoare
constant. La vremea respectiv soluia a constat n utilizarea unor platane greoaie a cror inerie dictau
practic viteza de redare, n concluzie nu exista nici o informaie (feedback) din partea gramofonului cu
privire la turaia real de redare. Performanele aparatului erau dictate de miestria i priceperea
fabricantului platanelor.
Pickup-ul a reprezentat urmtorul pas pe scara evoluiei gramofonului. Versiunea modern a acestuia (Fig.
1.1), denumit generic i Vinil Player evideniaz puternic conceptul de integrare a componentei electronice,
mecanice i cel mai important a celei informaionale. Acesta utilizeaz un senzor de turaie i un platan mult
mai uor. n acest caz conceptul de feedback este clar evideniat, turaia este msurat continuu de ctre
senzor, transmis mai departe ctre un microcontroler, care are rolul de a modula puterea actuatorului
pentru a menine turaia n parametrii impui. ns adevratul produs mecatronic l-a reprezentat aa
numitul CD Player.
CD Player-ul este un produs mecatronic de nalt tehnicitate unde capul de citire standard al gramofonului a
fost nlocuit cu un cap de citire laser. Viteza de redare a CD-ului nu este una constant ci variaz ntre 300 i
500 RPM scznd odat cu creterea diametrului pistei citite. Informaia citit este procesat digital, sub
form de bii i octei, este memorat ntr-o zon memorie tampon i procesat ulterior de ctre un
convertor digital/analogic (DAC). Acest procedeu elimin toate fluctuaiile de vitez. Aceste performane nu
ar fi putut fi atinse niciodat cu un sistem pur mecanic, chiar dac am avea la dispoziie un sistem foarte bun
de control al turaiei. n cazul de fa, meninerea turaiei CD-ului la parametrii foarte strici nu este
obligatorie, ci trebuie doar s previn umplerea sau golirea zonei de memorie tampon. Fluxul informaiei n
cadrul CD Player-ului se poate observa n Fig. 1.2.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 8
Fig.1.1. Dezvoltarea tehnologic a gramofonului
Fig.1.2. Fluxul informaional n cadrul unui CD Player
Flexibilitatea introdus prin combinarea mecanicii de precizie i a electronicii n partea de control, a
permis dezvoltarea CD-ROM Player-elor , acestea din urm rulnd la viteze de peste 30 ori mai mari dect
CD Player-ele originale. Un nou mod de gndire a fost necesar pentru a da natere unei astfel de soluii.
n momentul de fa tehnologia Blu-Ray reprezint vrful n domeniul stocrii informaiei pe suport
optic. Tehnologia permite stocarea a maximum 50 GB de informaie pe un disc, ns tehnologia viitoare va
aparine Discurilor Holografice. Acestea vor putea stoca pn la 3.9 TB de informaie. Dispozitivul de citire
va avea dou capuri laser de citire, un laser rou i unul verde. Informaia va fi citit i prelucrat de cele
dou capuri laser i convertit n final ntr-o form utilizabil.
Oscilator
La vechile gramofoane turaia
de redare era dictat de
ineria platanului.
Versiunea modern a gramofonului
utilizeaz un senzor de turaie n
combinaie cu un platan foarte uor.
Adevratul produs mecatronic l-a
reprezentat CD Player-ul. Discul
este citit la viteze variabile n funcie
de diametrul pistei de citire.
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 9
Automobilul modern
Un alt exemplu sugestiv l reprezint automobilul modern (Fig. 1.3). Pn n anii 1960 radio-ul a fost
singura component electronic semnificativ din componena automobilului. Toate celelalte funcii erau
pur mecanice sau electrice, ca sistemul de rencrcare a bateriei i sistemul de pornire al motorului. Nu
existau sisteme inteligente de protecie cu excepia barelor de protecie i structura de rezisten a
caroseriei.
Centura de siguran a fost introdus de-abia la nceputul anilor 1960 cu scopul de a mbuntii
condiiile de siguran ale pasagerilor i era acionat complet mecanic. Toate sistemele auxiliare ale
motorului erau controlate de ctre ofer i/sau alte sisteme mecanice. De exemplu, nainte de apariia
senzorilor i microcontrolerelor, generarea scnteii la bujii era realizat prin intermediul unui distribuitor
mecanic. Variabila controlat era timpul de generare a scnteii. Aceast metod nu era optim din punct de
vedere al eficienei carburantului i arderii. Prin modelarea matematic a procesului de aprindere, a reieit
c pentru a crete eficiena arderii, exist un moment optim de generarea a scnteii. Acest moment depinde
de ncrcarea mainii, de vitez i ali parametrii msurabili.
Sistemul de aprindere electronic a fost unul dintre primele sisteme mecatronice introduse n
automobile la sfritul anilor 1970. Sistemul de aprindere electronic este constituit din: senzor pentru
determinarea poziiei arborelui cotit, axului cu came, debitul aerului, poziia i viteza pedalei de acceleraie
i un microcontroler dedicat pentru determinarea timpului optim de generare a scnteii. Implementarea
timpurie a acestui sistem avea n componen doar un senzor cu efect Hall pentru determinarea poziiei
rotorului din cadrul distribuitorului. Ulterior, distribuitorul a fost eliminat complet, iar scnteia a fost
controlat direct utiliznd un microcontroler.
Sistemul de antiblocare a roilor la frnare (ABS) a fost introdus tot la sfritul anilor 1970. Sistemul
ABS sesizeaz blocarea unei roi i moduleaz presiunea hidraulic n aa fel nct alunecarea s fie minim
(meninerea traciunii la frnare).
Sistemul de control al traciunii (TCS) a fost introdus n automobile la mijlocul anilor 1990. Sistemul
TCS sesizeaz alunecare roilor n momentul acceleraiei i moduleaz puterea roii care alunec
(meninerea traciunii la acceleraie). Acest proces asigur oferul c automobilul accelereaz la puterea
maxim indiferent de condiiile de drum.
Sistemul de control dinamic al automobilului (VDC) a fost introdus spre sfritul anilor 1990. VDC
funcioneaz similar cu TSC, cu meniunea c s-a adugat un senzor pentru determinarea unghiului de
rotaie dup axa Z i un accelerometru pentru deplasarea lateral a mainii. Intenia oferului este
determinat de poziia volanului n timpul mersului i apoi comparat cu direcia actual de mers. TCS este
activat pentru controlul vitezei mainii i pentru minimizarea diferenei dintre poziia volanului i direcia de
mers a mainii. n unele cazuri, ABS-ul este utilizat pentru a ncetinii maina cu scopul obinerii controlului
dorit.
n automobilele moderne din ziua de astzi sunt utilizate microcontrolere de 8, 16 i 32 bii pentru
implementarea diverselor sisteme de control. Microcontrolerul are n structura lui intern memorie
EEPROM/EPROM, intrri/ieiri digitale i analogice, convertoare A/D, PWM, temporizatoare, numrtoare,
ntreruperi i n unele cazuri modul de procesare digital a semnalelor. Microcontrolerele pe 32 de bii sunt
utilizate pentru managementul motorului, controlul transmisiei i airbag-uri; cele pe 16 bii sunt utilizate
pentru ABS, TCS, VDC, sistemul de aer condiionat, i instrumentele de bord; iar cele pe 8 bii sunt utilizate
pentru scaune, controlul oglinzilor retrovizoare i sistemul de deschidere al geamurilor. Exist ntre 30 i 60
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 10
de microcontrolere ntr-o main modern. Acest numr va crete tot mai mult n urmtorii ani, iar acest
lucru evideniaz necesitatea mecatronicii n industria constructoare de maini.
Viitoarele sisteme mecatronice destinate industriei de fabricaie a mainilor ar putea include:
autoparcare n lateral, nlocuirea unor sisteme hidraulice cu sisteme servo electromecanice, asistare la
parcarea cu spatele. Deoarece numrul automobilelor este n continu cretere, standarde stricte cu
referire la emisia de noxe sunt impuse de la an la an. Noile produsele mecatronice vor contribuii esenial n
viitor pe aceast component.
Fig.1.3. Automobilul modern
Maina de splat modern
nc din cele mai vechi timpuri oamenii i-au splat hainele prin cufundarea acestora n apa rurilor
i lovirea acestora de pietre. Primele dispozitive inventate pentru splarea hainelor au fost grtarele de
lemn. n 1858, americanul Hamilton Smith a patentat maina de splat rotativ. Dei avea o form care
semna cu maina de splat modern, invenia lui Smith era nc acionat manual. Prima main de splat
acionat electric a fost inventat n Statele Unite n 1908, modelul Thor fiind brevetat de ctre Alva Fisher i
introdus pe pia de compania Hurley Machine Company of Chicago. n Europa, producia mainilor de
splat automate nu a nceput dect la nceputul anilor 50 (Fig. 1.4).
Maina de splat modern este un adevrat produs mecatronic. nglobeaz un sistem senzorial
extrem de robust i performant monitorizat de un microcontroler care moduleaz energia mecanic, cea
termic i aciunea chimic de curare a rufelor. Maina de splat a viitorului ar putea fi cea bazat pe
tehnologia Xeros
1
. n 2008, Universitatea din Leeds a dezvoltat un model de main de splat care folosete
doar 280 ml de ap la un ciclu de splare. Aceasta din urm ar putea revoluia felul n care funcioneaz
mainile de splat economisind cantiti uriae de ap i energie.
1
http://www.xerosltd.com/
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 11
Model anii 1860
Model anii 1900
Model anii 1950
Prezent
Fig.1.4. Dezvoltarea tehnologic
a mainii de splat
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 12
Platforme mecatronice educaionale
Educaia mecatronic
Mecatronica s-a nscut n mediul industrial, termenul a fost brevetat de ctre concernul japonez
Yaskawa Electric. Strdaniile la nivel academic, pentru a asigura pregtirea specialitilor n acord cu cerinele
noii tehnologii au condus la conturarea principiilor mecatronice n educaie.
Aceste principii vizeaz:
dezvoltarea gndirii sistemice;
formarea deprinderilor de a lucra n echip.
Educaia mecatronic asigur flexibilitate n aciune i gndire, trsturi definitorii ale specialistului
n economia de pia. Networking este cuvnt cheie n educaia mecatronic. Reeaua este structura care
stimuleaz integrarea i faciliteaz controlul.
Oferind soluii eficiente pentru promovarea interdisciplinaritii, mecatronica a devenit suportul
demersurilor pentru stimularea iniiativei i a creativitii. Laboratoarele transdisciplinare de mecatronic
constituie baza pentru materializarea principiilor: nvare prin practic, nvare prin cercetare.
Abordrile n acest sens sunt eseniale pentru mutarea accentului de pe latura de informare pe cea
de formare, pe toate treptele procesului educaional. Educaia mecatronic asigur dezvoltarea gndirii
moderne, care, este: global, probabilist, modelatoare, operatoare, pluridisciplinar i prospectiv.
Coninutul termenului s-a mbogit continuu, ca urmare fireasc a evoluiei n dezvoltarea
tehnologic. Foarte curnd mecatronica a devenit filosofie. Pentru practica inginereasc, filosofia
mecatronic a marcat saltul de la ingineria tradiional, secvenial, la ingineria simultan sau concurent.
n ultimii ani mecatronica este definit simplu: tiina mainilor inteligente. Mai recent, demersurile
pentru promovarea conceptului de integrare n educaie i cercetare, aduc n atenie problema mecatronicii
ca: mediu educaional pentru integrare, respectiv, mediu de proiectare i fabricare integrat, pe fundalul
cruia s-a dezvoltat conceptul de proiectare pentru control.
n literatura de specialitate au devenit consacrate extinderi n alte domenii precum: hidronic,
pneutronic, termotronic, autotronic, agromecatronic (agricultur de precizie) etc. Evoluia n
dezvoltarea tehnologic nseamn: micromecatronic, nanomecatronic i biomecatronic. Tendina
general este de intelectualizare a mainilor i sistemelor.
2
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 13
Platforme educaionale
Sistemele mecatronice folosesc pentru realizarea funciei impuse energia electric, hidraulic,
pneumatic sau alte surse neconvenionale. Toate aceste forme de exploatare energetic i gsesc locul
ntr-o gam larg de aplicaii moderne, pornind de la sistemele industriale, medicale i pn la tehnica
militar i aerospaial.Funcie de specificul aplicaiei, pot fi n consecin exploatate avantajele fiecrui
sistem de tranfer energetic: precizia i elegana n acionare a sistemelor electrice, simplitatea constructiv
i sileniozitatea sistemelor pneumatice, densitatea de for i precizia sistemelor hidraulice, n general orice
avantaj pe care o anumit transformare energetic l poate constitui pentru o anumit aplicaie.
Actuatorii fluidici spre deosebire de actuatorii electrici au marele avantaj al generrii simple a
micrii liniare. Acest avantaj coroborat cu densitatea mare de for explic utilizarea pe scar larg a
sistemelor de acionare hidraulic. Proprietatea intrinsec a acestor sisteme simbolic descris prin
sintagma muchi de fier i tendoane de oel este mbogit cu noiunea de precizie (1 m) datorit
fuziunii cu electronica.
Tehnicile de control modern au permis asocierea noiunii de precizie i cu sistemele pneumatice,
astzi fiind raportate precizii sub 10 m pentru aceste sisteme. Aadar, n pofida multiplelor neliniariti ce
caracterizeaz sistemele fluidice, tehnicile de control modern, favorizate de utilizarea electronicii digitale,
fac posibil exploatarea acestor sisteme n aplicaii ce necesit precizii deosebite.
Proiectarea mecatronic a sistemelor i produselor impune dezvoltarea unor cicluri de modelare,
identificare, simulare, sintez, analiz, optimizare, testare, astfel nct produsul final s integreze intim, la
nivel hardware i software, contribuiile tuturor componentelor. Acest mod de abordare a proiectrii
stimuleaz efectul de sinergie prin corelarea tuturor resurselor i transformrilor, n scopul aceleiai
funciuni. Condiiile de laborator limiteaz integrarea componentelor la nivelul software: sistemul cu
componentele sale este dat, optimizarea funcionrii acestuia poate fi realizat doar prin intermediul
strategiei de control, prin utilizarea i procesarea optimal a informaiei din sistem. Astfel, se pune
problema achiziionrii informaiei cu privire la valoarea parametrilor de stare ai sistemului i apoi a
dezvoltrii strategiilor de control optimale, adaptive, n baza acestor informaii.
Sistemele mecatronice modulare reproduc la scara redus diverse funcii existente n procesele
industriale. Prin interconectarea diverselor module se configureaz sisteme i procese complexe. Staiile de
lucru permit: reconfigurri n conformitate cu diverse aplicaii, dezvoltarea diverselor strategii de control,
dezvoltarea conceptelor de control n sistemele integrate, conducerea electronic a sistemelor (PLC i PC),
optimizarea funcional a proceselor, implementarea tehnicilor de comunicaie standardizate, dezvoltarea
tehnicilor de depistare si remediere a disfunciunilor. Sunt acoperite urmtoarele domenii tehnologice:
sisteme mecatronice, sisteme de acionare (electrice, pneumatice, hidraulice), modelarea si simularea
proceselor mecatronice, programarea PLC-urilor, tehnici de control a micrii/forei, programarea roboilor,
tehnici de manipulare, tehnologii de asamblare, sensoric, tehnici de msurare i monitorizare a
parametrilor proceselor, comunicaia standardizat.
Informaia cu privire la valoarea unor mrimi din sistem este indispensabil, att la nivelul de baz
al tehnicilor de control implementate, ct i la nivelul de management a funcionalitii sistemelor
mecatronice. Utilizarea practic a acesteia implic achiziionarea ei prin intermediul senzorilor, respectiv
prelucrarea semnalelor electrice.
Standurile permit studiul independent al unor grupe de senzori specifici sistemelor mecatronice,
respectiv achiziia i prelucrarea semnalelor prin intermediul uneltelor Matlab/Simulink/Signal processing.
Standurile includ: senzori analogici inductivi, capacitivi, optici, ultrasonici, mrci tensometrice, senzori de
presiune piezoelectrici, poteniometre liniare, senzori numerici temposonici, encodere etc.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 14
Fig.2.1. Staii de producie modulare: Distribuie, Testare, Procesare, Manipulare, Asamblare, Sortare.
Tehnologia de control: PLCs (SIMATIC S7-313C, Festo FEC Standard), EasyPort, PC. Software: Siemens Step 7,
COSIMIRRobotics, COSIMIRPLC, FluidSIMP, Mechatronics Assistant.
Fig.2.2. Sisteme mecatronice pentru studiul i dezvoltarea algoritmilor de control a micrii: motoare de c.a
i pas cu pas, motoare pneumatice, transmisie mecanic prin curea dinat, senzori numerici incrementali de
tipul encoderelor, controlere digitale n tehnologie PLC sau dSPACE, medii de dezvoltare Matlab/Simulink,
dSpace, Step 7, Festo FST.
Conceptele mecatronice aplicate n educaie i cercetare permit dezvoltarea de aplicaii care
integreaz diverse tehnologii indiferent de natura energetic a transformrilor (Fig. 2.1 i 2.2).
Sistemele industriale comport anumite particulariti legate de arhitectura acestora, de limbajele
specifice folosite, de standardul de comunicaie utilizat, de accesul limitat la resursele sistemului. n multe
situaii, legile de micare nu pot fi introduse analitic, ci doar prin intermediul unui mediu pus la dispozitie de
productor i n limitele permise de acesta. O asemenea situaie corespunde cazului analizat n continuare
(Fig. 2.3).
PLC
FST 101
gripper,
magazie, brat
oscilant
panou de
comanda
Fig.2.3. Sistem servopneumatic pick & place
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 15
n cazul acestei aplicaii legile de micare dup cele dou axe sunt controlate de SPC200. Celelalte
elemente ale sistemului sunt controlate de FST101, utiliznd limbaje industriale specifice PLC-urilor:
statement list (STL), ladder diagram (LDR). Funcionarea sistemului, n configuraia dat, presupune
sincronizarea funcionrii celor dou PLC-uri, ntruct ambele contribuie la executarea unei anumite sarcini,
respectiv utilizarea a dou limbaje industriale pentru implementarea unei sarcini: cod G pentru legile de
micare, statement list pentru ncadrarea acestor legi n contextul unei aplicaii.
Legile de micare obinute prin planificarea micrii, chiar ntr-un cadru limitat (industrial) de
accesare a resurselor sistemelor, conduc la atenuarea ocurilor n funcionarea acestora, la mbuntirea
funcionalitii.
Proiectarea i optimizarea funcional a sistemelor mecatronice implic proceduri de modelare,
identificare, sintez, analiz i testare a produselor. Tehnica digital permite implementarea de algoritmi de
control care confer flexibilitate, adaptabilitate i precizii sporite sistemelor. Optimizarea funcional a
servosistemelor hidraulice implic construirea modelului matematic, analiza fenomenelor fizice asociate:
curgerea turbulent prin diafragme, frecarea n motoarele liniare, compresibilitatea fluidului de acionare,
micarea sertarului sub aciunea electromagnetului proporional. Determinarea constantelor modelului
matematic, simularea numeric a procesului, identificarea experimental a procesului, analiza i testarea
modelului sunt etape preliminare proiectrii strategiilor de control. Platformele de control dSPACE permit
achiziionarea datelor din sistem, prelucrarea i vizualizarea parametrilor de stare, respectiv controlul
servosistemului prin diverse strategii, simple sau complexe. n Fig. 2.4 se detaliaz standul i strategia de
control pentru servosistemul considerat.
Sistemul de dezvoltare dSPACE face parte dintr-o platform de modelare, simulare i control a
sistemelor mecatronice dezvoltat n cadrul proiectului CEEX, CONMEC.
Alte abordri n domeniul cercetrii vizeaz tehnici de proiectare a sistemelor mecatronice n care
pri ale sistemului sunt reale, altele sunt virtuale astfel nct procedurile de testare i validare a rezultatelor
s poat fi derulate chiar n absena unor componente ale sistemului vizat. Alte direcii de cercetare au ca
obiectiv optimizarea proceselor de urmrire a traiectoriilor i eliminarea ocurilor, reducerea zgomotului n
sistemele mecatronice, optimizarea parametrilor micrii prin prelucrarea optimal a parametrilor de stare,
optimizarea tehnicilor de control a impedanei mecanice.
Platformele mecatronice constituie o baz ideal pentru instruire, educaie i cercetare
mecatronic, pentru susinerea procesului de reconversie i orientare profesional n acord cu meseriile i
cerinele UE.
Signa
l 1
Signal Builder
Signal
Generator
Saturation
Manual
Switch
u
e3
u3
K3
u
e2
u2
K2
u
e1
u1
K1
1
s
Integrator
-
K-
Gain
3
du/
dt
Derivative
DAC DS1104DAC_C1 ADC C7 ADC C6 ADC C5
ref
U=-k*x
K = matricea
de control
optimal
x2 x1 xp
SERVOSISTEM HIDRAULIC
GENERARE
REFERINTA
CONTROLER
OPTIMAL
CONVERSIE
DATE
dSPACE
DS1104
x1 x2 xp u
Fig.2.4. Optimizarea funcional a servosistemelor hidraulice
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 16
Concepte utilizate n dezvoltarea aplicaiilor
Metode de dezvoltare precum Prototiparea Controlului (Control Prototyping), Software In the Loop
(SIL), Hardware In the Loop (HIL) sunt tot mai des utilizate n industrie n procesul de proiectare i cercetare
(n special n industria auto), ele permind dezvoltarea fazelor proiectrii ntr-un mediu integrat, respectiv
implementarea i testarea rapid a algoritmilor de control. Aceste metode implic o funcionare n timp real
a platformelor de proiectare, indiferent de configuraia sistemului/procesului, atta vreme ct se
nteracioneaz cu sisteme reale. Echipamentele din dotarea autolaboratorului platforma dSpace DS1104
permit implementarea acestor metode moderne. O succint detaliere a acestor tehnici de dezvoltare,
simulare i testare n timp real este realizat n Fig. 2.5.
Fig.2.5. Metode de dezvoltare a aplicaiilor
Prototiparea Controlului (Control Prototyping): procesul este real i este controlat de un sistem de
control simulat prin utilizarea unui alt hardware dect cel ce va fi utilizat n final.
Hardware-In-the-Loop (HIL): procesul este simulat i controlat pe baza unei strategii de control
implementat pe un hardware specific (cel care va fi utilizat n controlul sistemului).
Software in the loop: procesul este simulat i este executat n timp real mpreun cu algoritmul de
control, care este de asemenea simulat.
Tehnicile de dezvoltare amintite mai sus comport utilizarea unor componente hardware i
software dedicate, care s permit rularea n timp real a aplicaiilor. Cteva din elementele ce pot fi utilizate
n arhitectura unui sistem de simulare-testare utiliznd resursele acestei platforme de cercetare sunt
detaliate n cele ce urmeaz:
Componente hardware: module procesor, module intrare/ieire ce acoper cerinele HIL
(generatoare de semnal bazate pe algoritmi i forme de und, module de msurare etc.),
simulatoare ale bus-urilor de comunicaie, elemente de condiionare de semnal, incluznd
adaptoare de tensiune, simularea defectelor electrice, simulatoare de sarcin (electric, mecanic
etc.)
Componente software: software de implementare (pentru implementarea i execuia n timp real a
modelului), software pentru stabilirea i monitorizarea comunicaiei pe bus; modele virtuale ale
sistemelor sau componentelor acestora, software pentru managementul experimentelor, software
pentru testare, pentru programarea grafic i administrarea automat a testelor.
Componente opionale: animaie real-time 3D, integrarea i sincronizarea unor module adiionale,
precum cele pentru diagnosticare i calibrare.
Simulare in timp real
Proces real
Controler simulat
Proces simulat
Controler simulat
Proces simulat
Controler real
CP
(Control Prototyping)
SIL
(Software-In-the-Loop)
HIL
(Hardware-In-the-Loop)
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 17
Compatibilitatea dintre dSpace i Matlab-Simulink genereaz un mediu de dezvoltare extrem de
puternic, grania dintre abordarea virtual i cea real aproape disprnd. n configuraia unei asemenea
platforme de dezvoltare/simulare/testare pot fi introduse att componente reale ct i modele virtuale,
funcie de obiectivul vizat. Astfel sunt posibile urmtorele abordri: testarea unei funcii noi pe un sistem
existent fr a pune n pericol sistemul, testarea fiecrei componente din sistem prin conectarea la sistemul
virtual, testarea comportamentului sistemului la apariia unor defeciuni, testarea unor noi strategii de
control care optimizeaz funcionarea sistemului.
Instrumente software pentru dezvoltarea aplicaiilor industriale
Din punct de vedere educaional, respectiv din punct de vedere al tehnicilor de cercetare, se
identific trei abordri privind studiul sistemelor:
studiul pe sistem real (proces real, controler real; toate componentele sistemului sunt reale, Fig.
3.1);
studiul pe sistem simulat (proces simulat, controler simulat; toate componentele sistemului sunt
simulate - concept SIL, Fig. 3.2);
studiul pe sistem parial real - parial simulat (hibrid - concept HIL, Fig. 3.3).
Fig. 3.1. Studiul pe sistem industrial real (proces real, controler real)
3
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 18
Fig. 3.2. Studiul pe sistem industrial simulat (proces simulat, controler simulat) - concept SIL
a) Controler simulat Proces real
b) Controler real Proces simulat
Fig. 3.3. Studiul pe sistem parial real - parial simulat (hibrid) (concept HIL)
Tehnologia SIEMENS-FESTO (Siemens Simatic STEP7 - Cosimir PLC - FluidSim H/P) permite
urmtoarele abordri:
proces simulat n Cosimir PLC controler simulat n Siemens S7-PLCSIM (SIL)
proces simulat n Cosimir PLC controler real prin interfaa EasyPort (HIL)
proces simulat n Cosimir PLC controler simulat n FluidSim H/P (SIL)
proces simulat n FluidSim H/P controler simulat n Siemens S7-PLCSIM (SIL)
proces simulat n FluidSim H/P controler real prin interfaa EasyPort (HIL)
proces simulat n FluidSim H/P controler simulat n FluidSim H/P (HIL)
proces real prin interfaa EasyPort controler simulat n Siemens S7-PLCSIM (HIL)
proces real prin interfaa EasyPort controler simulat n FluidSim H/P (HIL)
Legturile de date care favorizeaz comunicarea ntre cele trei medii sunt asigurate prin intermediul
unui server OPC. Comunicarea dintre medii se face simplu, selectnd tipul de simulare dorit, dup cum se
poate observa n Fig. 3.4.
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 19
Fig. 3.4. Tipuri de conectare a sistemului parial real - parial simulat prin intermediul server-ului OPC
Cosimir PLC este un simulator grafic 3D care pune la dispoziia utilizatorului diferite replici ale unor sisteme
de producie industriale (Fig. 3.5). Toate aceste aplicaii software pot fi conduse prin intermediul unui PLC
extern sau a unui PLC simulat, fiind permis simularea defeciunilor (defeciuni ale senzorilor, cabluri
ntrerupte sau alte avarii), testarea diverselor strategii de control, monitorizarea parametrilor etc.
Utilizatorul se familiarizeaz astfel cu modul de operare i structura unui sistem industrial, programeaz
funcionarea sistemului utiliznd tehnologii i limbaje reale specifice mediului industrial, fr riscul de a
deteriora instalaia (se aduce procesul n laborator n form simulat).
Fig 3.5. Mediul Cosimir PLC
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 20
S7-PLCSIM este simulatorul integrat al mediului de dezvoltare Simatic STEP 7 (Fig. 3.6).
Funciile simulatorului:
testarea programelor de control fr a fi necesar conectarea la un PLC real.
Vizualizarea i modificarea variabilelor programului (temporizatoare, numrtoare, etc.),
Rularea pas cu pas a algoritmului de control.
Fig 3.6. Interfa S7-PLCSIM
FluidSIM H/P este un software pentru crearea, simularea i studiul circuitelor electropneumatice,
electrohidraulice i digitale (Fig. 3.7). Programul dispune de fotografii, animaii i explicaii ale principiului de
funcionare pentru toate componentele hidraulice i pneumatice uzuale. Acest lucru il face extrem de bun
pentru persoanele autodidacte. Ofer de asemenea o ntreag gam de posibiliti de comunicare cu alte
programe prin intermediul interfeelor standardizate DDE i OPC. Cu ajutorul interfeei EasyPort D16 se
poate asigura legtura cu procesul real.
Fig 3.7. Aplicaia FluidSIM
A1 Sisteme industriale moderne. Tehnologii educaionale
A1 - Pag 21
Interfaa EasyPort D16 (16 intrri/16 ieiri) asigur legtura dintre PLC-ul extern i PC/proces simulat,
convertete semnalele logice externe i comunic cu PC-ul prin intermediul unui protocol de comunicaie
RS-232 (Fig. 3.8). Intrrile i ieirile interfeei sunt izolate optic prin intermediul unor optocuploare.
Fig.3.8. Interfaa hardware EasyPort
Aplicaia EzOPC (server-ul OPC) asigur legturile bidirecionale de date dintre cele trei medii SIEMENS-
FESTO (Fig. 3.9). Termenul OPC provine din Open Connectivity via Open Standards i este o interfa
standardizat n mediul industrial ce asigur transferul de informaie dintre aplicaiile de tip Windows i
echipamentele industriale. Server-ul OPC permite sarcini cum ar fi vizualizarea, msurarea sau achiziia de
date s fie efectuat indiferent de echipamentele implicate. Astfel c, OPC este un standard ce nu este legat
strict de o anumit aplicaie.
Fig.3.9. Aplicaia EzOPC
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A1 - Pag 22
A2 - Pag 1
Sisteme de acionare
pentru aplicaii industriale
1. Studiu comparativ ntre sistemele electricehidraulice-pneumatice
2. Structura circuitelor hidraulice i pneumatice
Studiu comparativ ntre sistemele electrice-hidraulice-pneumatice
Orice proces industrial necesit manipularea unor obiecte sau exercitarea unor fore asupra lor.
Acest lucru este realizat uzual prin conversia energiei electrice, hidraulice sau pneumatice n lucru mecanic.
n majoritatea cazurilor, sistemele de poziionare sunt controlate cu ajutorul motoarelor de curent continuu
sau a celor de inducie de curent alternativ. Micarea de rotaie se obine simplu, fiind starea normal de
funcionare a unui motor electric, iar cea de translaie prin utilizarea unor mecanisme de conversie:
transmisii prin urub, prin curele etc. Pentru obinerea unei simple fore sau a unei deplasri scurte se pot
utiliza solenoizii (exist o limit pentru fora ce poate fi obinut cu aceste dispozitive). Echipamentele
conduse cu ajutorul lichidelor se numesc sisteme hidraulice (din grecescul hydra = ap i aulos = conduct;
descriere ce implic utilizarea apei ca i fluid dei n practic se utilizeaz uzual uleiuri). Echipamentele
conduse cu ajutorul aerului se numesc sisteme pneumatice (din grecescul pneumn = suflare, vnt). Cel mai
utilizat gaz n sistemele pneumatice este aerul, ocazional azot (exemplu - roile de avion).
Fiecare tip de sistem are avantajele i dezavantajele lui i pentru ndeplinirea aceleai sarcini
industriale se pot utiliza sisteme din cele trei categorii mai sus amintite. Inginerul trebuie s analizeze
situaia i s aleag soluia constructiv cea mai favorabil care se preteaz pentru sarcina de realizat. De
exemplu, principalele avantaje i dezavantaje ale sistemelor pneumatice sau hidraulice sunt strns legate de
caracteristica fluidului ce le acioneaz: compresibilitatea ridicat a aerului i incompresibilitatea uleiului.
Compresibilitatea aerului face extrem de dificil controlul proporional al sistemelor pneumatice, n
industrie fiind utilizate n majoritatea cazurilor pentru sarcini de poziionare de tip ON/OFF sau cu mai multe
poziionri intermediare. n ultimii ani au aprut i soluii pentru controlul proporional al sistemelor
A2
1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A2 - Pag 2
pneumatice, ns trebuie avute n vedere costurile. Totodat: sunt rapide, robuste, simple i uor de
ntreinut, curate. Incompresibilitatea uleiului permite realizarea unui control proporional bun n cazul
sistemelor hidraulice, ns pot aprea scurgeri de ulei. Un sistem pneumatic industrial lucreaz uzual la o
presiune de 8 bar pe cnd unul hidraulic la o presiune de 150-300 bar (densitate mare de for). Comparnd
un motor electric cu unul hidraulic d.p.d.v. al densitii de for, primul dezvolt o presiune de maxim 15
bar, pe cnd cel de-al doilea 600 bar. Aceast diferen face ca raportul maselor celor doua motoare sa fie
de 14:1, raportul gabaritelor de 26:1, momentul de inerie masic de 72:1 (cu implicaii mari n timpul de
accelerare sau de rspuns la o excitaie treapta, adic performana dinamic a motorului). Un al doilea mare
avantaj este acela al realizrii mult mai simple a micrii liniare, la vitez mic, att de deficitar n
acionarea electric.
Avantajele si dezavantajele celor trei tipuri de sisteme vor fi exemplificate n cele ce urmeaz prin
analiza unui sistem de ridicare a unei sarcini pe o distan de 500 mm utiliznd acionare electric,
hidraulic i pneumatic. Astfel de procese sunt uzuale n industrie. Exemplul se va concluziona cu un tabel
n care se vor prezenta principalele caracteristici ale celor trei sisteme de acionare.
Sistem de acionare electric
n cadrul unui sistem de acionare electric avem trei soluii uzuale de acionare: solenoid, motorul
de curent continuu sau motorul de inducie de curent alternativ. Solenoidul produce o micare liniar, dar
cursa este limitat la o distan de aproximativ 100 mm. Motoarele de curent continuu i cele de curent
alternativ au nevoie de un mecanism de conversie a micrii lor naturale de rotaie ntr-una de translaie.
Acest lucru nu reprezint o problem; exist soluii comerciale care includ att motorul ct i mecanismul
de conversie. Alegerea motorului depinde n general de viteza dorit n cadrul aplicaiei. Un motor de curent
continuu echipat cu un tahometru i acionat de un circuit de putere cu tiristoare permite un control n
vitez foarte bun, dar necesit mentenan repetat a periilor i comutatorului. Motorul de inducie de
curent alternativ nu necesit mentenan, dar sunt dispozitive de acionare cu vitez fix impus constructiv
de numrul de poli i frecvena tensiunii de alimentare. Viteza poate fi modificat cu un convertizor de
frecven dar trebuie avut n vedere supranclzirea motorului, dat fiind faptul c multe dintre aceste
motoare sunt rcite de un ventilator intern prins pe rotorul motorului (blocarea la suprasarcin).
Vom presupune c o vitez constant de avans i retragere este suficient pentru aplicaia noastr,
prin urmare alegerea logic va fi un motor de inducie de curent alternativ mpreun cu un mecanism urub-
piuli. Motoarele electrice nu pot rmne blocate la capt de curs, asta ar nsemna absorbia unui curent
extrem de mare i n final distrugerea lor (exist totui motoare speciale de curent continuu care cu un
control foarte bun n curent i un sistem de rcire adecvat pot fi blocate la capt de curs), de aceea se vor
utiliza senzori pentru semnalizarea captului de curs pentru oprirea motorului din funcionare.
Astfel c sistemul nostru va arta precum cel din Fig. 1.1, fiind alctuit dintr-un mecanism urub-
piuli (cric) acionat de un motor de inducie de curent alternativ, doi senzori pentru semnalizarea
captului de curs i un dispozitiv de protecie a motorului n caz de suprasarcin.
A2 Sisteme de acionare pentru aplicaii industriale
A2 - Pag 3
Fig.1.1. Sistem de acionare electric
3
~
415V
Avans
Retragere
Siguran
suprasarcin
Motor
Avans
Retragere
Retragere
Avans
Avans
Retragere
Siguran
suprasarcin
Motor
electric
W
SC1
SC2
SC1
Senzor capt de
curs avans
Senzor capt de
curs retragere
Cric mecansim urub-piulit
M
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A2 - Pag 4
Sistem de acionare hidraulic
O soluie de acionare prin intermediul lichidelor este prezentat n Fig. 1.2. Actuatorul liniar
hidraulic este prezentat schematic n Fig. 1.2.a i este format dintr-o parte mobil, pistonul, care e conectat
direct la axul de ieire i o parte fix, carcasa. Dac fluidul este pompat n camera A, pistonul va avansa, iar
axul va fi extins; dac fluidul este pompat n camera B, pistonul se va retrage, iar axul va fi retras. Bineneles
c trebuie gndit o soluie pentru recuperarea fluidului din camera vecin. Fora maxim generat depinde
de presiunea fluidului i de aria seciunii pistonului. De exemplu, o presiune de 150 bar permite ridicarea a
150 kg pe cm
2
arie a pistonului, deci o sarcin de 2000 kg poate fi ridicat cu un piston de diametru 4.2cm.
Sistemul de acionare hidraulic pentru ndeplinirea sarcinii este prezentat n Fig. 1.2.b. Sistemul are nevoie
de un lichid pentru a funciona, reeaua de furtunuri trebuie s fie nchis, s transfere fluidul de la tanc
pn la una din camerele pistonului i s returneze fluidul din camera vecin napoi la tanc. Fluidul este
pompat n sistem de o pomp ce asigur fluxul lichidului la o presiune necesar de 150 bar. Astfel de
pompe, denumite i pompe de debit, nu pot opera cu o sarcin care crete la infinit, deoarece ele debiteaz
un volum constant de fluid la fiecare rotaie a pompei. Pentru o sarcin care crete la valori periculoase,
presiunea din sistem trebuie limitat pentru a evita spargerea furtunurilor sau deteriorarea pompei. Acest
lucru se realizeaz prin utilizarea unei supape limitatoare de presiune care deverseaz lichidul pompat
napoi la tanc n cazul atingerii unei presiuni maximale n sistem.
Micarea cilindrului este controlat de un distribuitor 4/3 (4 conexiuni / 3 poziii de funcionare). Pentru
extinderea pistonului, camera A este conectat la linia de presiune, iar camera B la tanc. Pentru retragerea
pistonului se inverseaz procesul anterior. n poziia de centru a distribuitorului, fluidul rmne blocat n
cilindru (acesta pstrndu-i poziia) i furtunurile rmn blocate (tot lichidul pompat se rentoarce la tanc
datorit regulatorului de presiune).
Cteva lucruri de menionat:
viteza pistonului poate fi controlat foarte simplu prin controlul volumului de debit ctre piston;
controlul foarte precis la viteze mici este principalul avantaj al sistemelor hidraulice;
capetele de curs sunt determinate de cursa pistonului, deci nu este necesar un sistem de protecie n
caz de suprasarcin;
pompa de debit trebuie acionat de o surs de energie extern, n majoritatea cazurilor de un motor de
inducie de curent alternativ, care necesit un circuit de pornire i un circuit de protecie la
suprasarcin;
fluidele din instalaie trebuie s fie foarte curate, deci prezena unui filtru este obligatorie pentru a
ndeprta impuritile nainte ca acesta s treac din tanc n pomp;
ca ultim observaie, de remarcat faptul c scurgerile de fluid sunt neplcute i de nedorit, o defeciune
major n instalaie putnd fi catastrofal.
La prima vedere sistemul hidraulic din Fig. 1.2b pare mai complicat dect sistemul electric prezentat
anterior, dar de menionat faptul c toate componentele ncadrate n chenarul cu linie ntrerupt sunt
uzuale pentru diverse procese industriale i nu numai pentru cel studiat n acest exemplu.
A2 Sisteme de acionare pentru aplicaii industriale
A2 - Pag 5
Fig.1.2. Sistem de acionare hidraulic
Filtru
Motor
electric
Supapa
limitatoare
Fluid n
exces
Avans
OFF
Retragere
A
B
Cilindru
Distribuitor
Deversarea
fluidului la tanc
Componente
uzuale multor
sisteme hidraulice
W
Pomp
Camera A
Camera B
Avans
Retragere
W
a)
b)
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A2 - Pag 6
Sistem pneumatic
n Fig. 1.3 sunt prezentate componentele unui sistem de acionare pneumatic. Acutatorul este un
cilindru cu piston unde fora maxim este dat de presiunea aerului i de aria seciunii pistonului. Presiunile
de lucru n sistemele pneumatice sunt mult mai joase dect n cele hidraulice; 10 bar permite ridicarea a 10
kg pe cm
2
arie a pistonului, deci un piston cu diametru de 16 cm poate ridica sarcina de 2000 Kg specificat
n cazul sistemului hidraulic. Sistemele pneumatice necesit actuatori mult mai mari pentru a ridica aceeai
masa n comparaie cu sistemele hidraulice. Distribuitorul cilindrului este asemntor cu cel hidraulic.
Diferena dintre cele dou sisteme este dat de fluidul de lucru (aer). Aerul este tras din atmosfer prin
intermediul unui filtru i adus la presiunea necesar prin intermediul unui compresor (alimentat printr-un
motor de inducie de curent alternativ). Temperatura aerului crete considerabil n procesul de compresare,
de aceea nainte ca aerul s poat fi utilizat acesta trebuie rcit, iar acest lucru implic apariia procesului de
condensare. Compresorul trebuie s fie urmat de un sistem de rcire i tratare a aerului. Sistemul de tratare
al aerului este urmat de un acumulator. Sistemele hidraulice utilizeaz o supap de presiune pentru a
deversa fluidul excedentar napoi la tanc, n cazul sistemelor pneumatice un comutator din cadrul
compresorului pornete motorul compresorului cnd presiunea scade i l oprete cnd presiunea atinge
nivelul dorit. Impresia general este aceea de complexitate, dar componentele ncadrate n chenar cu linie
ntrerupt sunt uzuale n majoritatea sistemelor pneumatice. Majoritatea interprinderilor produc aer
comprimat ntr-o staie central i l distribuie printr-o reea circular n toate zonele unde este nevoie,
precum se distribuie electricitatea, apa sau gazul.
Fig.1.3. Sistem de acionare pneumatic
Aer
Filtru
3
~
415V
PSI
Motor
electric
Compresor
Comutator de
presiune PSI
Sistem de
rcire i tratare
a aerului
Acumulator
OFF
Avans Retragere
Distribuitor
Evacuare
W
B
A
Deschis la atingerea
presiunii dorite n
sistem
Componente uzuale
multor sisteme
pneumatice
A2 Sisteme de acionare pentru aplicaii industriale
A2 - Pag 7
Tabel 1. Studiu comparativ ntre cele trei sisteme de acionare
Sistem Electric Sistem Hidraulic Sistem Pneumatic
Surs de energie Uzual din surse
exterioare
Motoare electrice sau
diesel
Motoare electrice sau
diesel
Stocarea energiei Limitat (baterii) Limitat (acumulatori) Bun (acumulatori)
Sistemul de distribuie Excelent, cu pierderi
minime
Limitat, facilitate local Bun
Costul energiei Sczut Mediu Scump
Actuatori rotativi Motoare de curent
continuu (control bun) i
alternativ (ieftine).
Viteze mici. Control bun.
Pot fi blocate.
Viteze variate. Control
deficitar al vitezei.
Actuatori liniari Deplasri mici cu
ajutorul solenzoizilor sau
mari prin mecanisme de
conversie.
Cilindri. Densitate de
for mare.
Cilindri. Fore medii.
Controlul forei Posibil cu solenoizi i
motoare de curent
continuu. Complicat din
prisma necesitii unui
sistem de rcire.
Control bun pentru fore
foarte mari.
Control bun pentru fore
medii.
Densitate de for mic mare medie
Siguran Aproximativ egal pentru toate
Randament bun foarte sczut foarte sczut
Oferta de componente ieftin scump Relativ scump
De notat
Pericol de ocuri
electrice.
Scurgeri nedorite.
Murdrie. Risc de
incendiu.
Zgomot
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A2 - Pag 8
Structura circuitelor hidraulice i pneumatice
Structura sistemelor pneumatice
Sistemele pneumatice sunt instalaii de putere ce utilizeaz aerul comprimat ca i agent de lucru
pentru transmiterea energiei mecanice (Fig 2.1). Compresorul convertete energia mecanic n energie
potenial a aerului comprimat. Aceast transformare faciliteaz transmiterea i controlul puterii. nainte de
utilizare, aerul trebuie s fie filtrat, dezumidificat i amestecat cu vapori de lubrifiant. Aerul comprimat este
stocat n acumulatori i transmis prin conducte sau furtune flexibile. Puterea pneumatic este controlat
prin valve de presiune, valve de debit i/sau valve distribuitoare (sau mai simplu: distribuitoare). La final,
energie pneumatic este reconvertit n energie mecanic prin intermediul motoarelor sau a cilindrilor
pneumatici.
Motor cu ardere
intern, motor
electric
Compresor
h
Transmisie,
stocare i
control
h
Motor circular
sau cilindru
pneumatic
Sarcin
T
T
F
v
Energie termic
sau electric
Lucru mecanic
Energie
mecanic
Energie
mecanic
Energie pneumatic
Fig.2.1. Schema bloc a sistemelor pneumatice
Sisteme hidrodinamice
Sistemele hidraulice transmit puterea mecanic prin majorarea energiei lichidelor hidraulice. Exist
dou tipuri de astfel de sisteme: hidrodinamice i hidrostatice. Sistemele hidrodinamice (numite i sisteme
hidrocinetice) transmit puterea mecanic prin intermediul energiei cinetice a fluidului hidraulic. n general,
aceste sisteme includ o pomp rotodinamic, o turbin i cteva elemente adiionale de control.
2
A2 Sisteme de acionare pentru aplicaii industriale
A2 - Pag 9
Aplicaiile sistemelor hidrodinamice sunt limitate la micri circulare i nlocuiesc transmisiile clasice
datorit unui raport putere/greutate superior i al unui nivel mai ridicat de controlabilitate. n cadrul
sistemelor hidrodinamice se deosebesc 2 tipuri de echipamente: cuplajulul i reductorul hidraulic.
Cuplajul hidraulic (Fig. 2.2) este practic un ambreiaj pe baz de fluid hidraulic. Pompa 2, acionat
prin intermediul arborelui de intrare *1+, antreneaz fluidul cu vitez foarte mare spre paletele turbinei 3,
creia i transfer o mare parte din energia sa cinetic. Turbina antreneaz n micare arborele de ieire 4
care dezvolt o putere foarte apropiat de cea de intrare. Fluidul hidraulic este recirculat permanent.
Reductorul hidraulic (Fig. 2.3) este un cuplaj cu un element suplimentar: statorul 5, care const ntr-
o serie de palete ataate la carcas. Se utilizeaz atunci cnd se impun rapoarte de transmitere diferite de
unitate, n condiiile unui randament acceptabil.
3-Turbin
4-Arbore
de ieire
2-Pomp
1-Arbore
de intrare
1-Arbore
de intrare
4-Arbore
de ieire
3-Turbin
2-Pomp
5-Stator
Fig.2.2. Cuplajul hidraulic Fig.2.3. Reductorul hidraulic
Structura sistemelor hidrostatice
Sistemele hidrostatice transmit i controleaz puterea variind presiunea fluidului hidraulic. Aceste
sisteme sunt utilizate n industrie, echipamente mobile, aeronautic i altele. Acestea poart denumirea de
sisteme hidraulice de putere. n Fig. 2.4 este evideniat principiul de funcionare i componena acestora.
Motor cu ardere
intern, motor
electric sau
turbin cu gaze
Pomp
P
Q
Transmisie i
control
P
Q
Motor circular
sau cilindru
hidraulic
Sarcin
T
T
F
v
Energie termic,
electric sau
termodinamic
Lucru mecanic
Energie
mecanic
Energie
mecanic
Energie hidraulic
Fig.2.4. Schema bloc a sistemelor hidraulice
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A2 - Pag 10
Conceptele de energie, putere i transmiterea puterii hidraulice sunt explicate cu ajutorul
exemplului urmtor: se consider un motostivuitor hidraulic ce ridic o sarcin dat vertical, pe distana y,
n intervalul de timp t (Fig. 2.5). Pentru ndeplinirea acestei cerine, motostivuitorul acioneaz asupra
sarcinii cu fora vertical F. Dac frecerea este neglijat, la echilibru, fora va fi egal cu greutatea maselor
deplasate (F = mg). Lucrul mecanic efectual este:
La sfritul ridicrii, energia potenial a corpului ridicat crete cu valoarea E, unde
n care
Energia potenial este nmagazinat pe perioada a t secunde. Aceast energie, raportat la
unitatea de timp, ne indic puterea consumat, astfel
n care
Fig. 2.5. Ridicarea unei greuti cu motostivuitorul hidraulic
P puterea consumat pentru ridicarea sarcinii *W+
v viteza de ridicare [m/s]
E energia potenial *J+
F fora vertical aplicat *N+
g acceleraia gravitaional *m/s
2
]
m masa sarcinii [kg]
L lucrul mecanic efectual [J]
y deplasarea pe vertical *m+
A2 Sisteme de acionare pentru aplicaii industriale
A2 - Pag 11
Sarcina este ridicat prin intermediul unui cilindru hidraulic cu tij unilateral, simpl aciune (se
extinde sub aciunea forelor de presiune i revine sub aciunea greutii sarcinii). Cilindrul (Fig. 2.6)
acioneaz asupra sarcinii cu fora F i se deplaseaz cu viteza v.
Uleiul hidraulic aflat la presiunea p este livrat cilindrului cu o valoare Q a debitului volumetric (m
3
/s).
Neglijnd frecarea dintre piston i cama cilindrului, fora de presiune dezvoltat se deduce din relaia:
Pe perioada t, pistonul este dislocat vertical pe distana y. Volumul uleiului ce a ptruns n incint
este V=A
p
y. Prin urmare, debitul poate fi exprimat:
Puterea furnizat de cilindru se determin cu relaia:
n care
Fig. 2.6. Ridicarea pe vertical prin intermediul unui cilindru hidraulic
Puterea consumat pentru ridicarea sarcinii este egal cu puterea hidraulic dezvoltat de cilindru
datorit ipotezelor prin care s-au neglijat frecrile i alte pierderi de energie.
A
p
aria pistonului [W]
v viteza de ridicare [m/s]
Q debitul volumic [m
3
/s]
V volumul descris de piston [m/s]
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A2 - Pag 12
Componentele de baz ale unui sistem hidraulic
n Fig. 2.7 sunt prezentate comparativ schema cu seciuni funcionale i simbolizarea standard ale
unui sistem hidraulic simplu.
Din punct de vedere funcional, sistemul este alctuit din:
1. Un motor electric antreneaz n micare pompa cu roi dinate, care convertete energia mecanic
n energie hidraulic
2. Uleiul hidraulic este condus prin evi i furtunuri ctre diferite supape prin intermediul crora i se
controleaz curgerea. Instalaia prezentat conine o supap limitatoare de presiune, o supap
distribuitoare i un drosel variabil cu supap de reinere
3. Energia hidraulic este convertit din nou n energie mecanic la nivelul cilindrului hidraulic. n
practic, se utilizeaz i motoare hidraulice pentru conversia energiei hidraulice n energie mecanic
de rotaie.
Cilindru hidraulic
Drosel variabil cu
supap de reinere
Distribuitor 4/3
Supap
limitatoare de
presiune
Pomp
Filtru
Rezervor
Fig.2.7. Circuitul hidraulic: seciune i simbolizare
A3 - Pag 1
Controlul
Sistemelor Industriale I
1. Sisteme de control industriale de tip PLC
- structur, limbaje standardizate
2. Limbajul industrial LDR (Ladder Diagram)
- operanzi, operatori, instruciuni
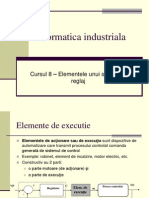
Sisteme de control industriale de tip PLC
Elementul central n cadrul unui sistem mecatronic l constituie sistemul de control electronic
care conduce, regleaz i optimizeaz procesul. Aceste funcii sunt asigurate de o structur fizic
dedicat de tip controler, care poate fi realizat cu circuite logice integrate, microprocesoare,
microcontrolere, automate programabile (PLC) sau se poate identifica chiar cu un calculator personal
(PC). n cazul controlului aplicaiilor industriale, cea mai larg utilizare o au sistemele de control
electronic de tip PLC (Programmable Logic Controller - Controler Logic Programabil/Automat
Programabil), care, pe baza unor programe elaborate de utilizator, comand i regleaz aplicaia,
vizualizeaz starea procesului, semnalizeaz anumite defeciuni, comunic ntre ele sau cu alte structuri
de control prin reele standardizate.
n cadrul abordrii curente se urmrete tratarea problematicii privind programarea aplicaiilor
industriale conduse prin intermediul PLC-urilor.
Scurt istoric. La sfrsitul anilor 60 Compania General Motors (prin Divizia Hydramatic -1968) a
elaborat specificaia de proiectare pentru un calculator industrial care urma s nlocuiasc controlul pe
baz de relee din industria de maini. Noul sistem de control trebuia s ndeplineasc urmtoarele
cerine: s ofere o modalitate simpl de programare a aplicaiilor; s poat fi utilizat n mediile
industriale (variaii de temperatur, tensiuni de alimentare variabile); modificrile de program s nu
presupun modificri structurale; s aib dimensiuni reduse, siguran n funcionare, robustee;
costurile de ntreinere s fie reduse.
Dou companii independente au rspuns cerinelor General Motors: Bedford Associates (astzi
Modicon) i Allen Bradley. Primele asemenea sisteme erau alctuite dintr-o unitate central (central
processor) conectat la exterior (proces) prin 4 module de cmp: intrri i ieiri de curent continuu i de
curent alternativ. Proiectate ca nlocuitoare ale releelor, limbajul de programare conceput a fost inspirat
din diagramele aplicaiilor conduse prin relee, adresat electricienilor i ca atare numit: Ladder Diagram
(diagrame scar). Numele dat acestor sisteme a fost initial Programable Controllers, cu abrevierea PC.
Odat cu apariia minisistemelor de calcul de tip Personal Computer (PC) i datorit dezvoltrii fulminate
a acestora, pentru a evita confuziile ntre cele dou abrevieri s-a procedat la referirea acestor sisteme de
control industrial, prin acronimul PLC (Programmable Logic Controller), marc nregistrat Allen Bradley
A3
1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 2
pentru aceast gam de produse. La noi se utilizeaz formularea Automat programabil pentru aceast
gama de produse.
Iniial, sarcina acestor controlere a fost s identifice starea logic a unor semnale de intrare i,
funcie de valoarea de adevr a unei expresii logice (construite pe baza semnalelor de intrare), s
comute ieirile corespunztoare.
Treptat, capacitatea de procesare s-a dezvoltat prin asimilarea funciilor temporizatoarelor,
numrtoarelor, executarea operaiilor matematice, procesarea semnalelor analogice (msurarea
forelor, deplasrilor). Evoluia tehnologiei a extins prelucrarea semnalelor binare, la semnalele
analogice, devenind posibil implementarea controlului n bucl nchis.
Aadar, evoluia n timp PLC-urilor a fcut posibil procesarea semnalelor analogice, vizualizarea
proceselor, comunicarea prin reele standardizate (CAN, PROFIBUS), accesarea aplicatiilor de la distan
etc. Acest nivel de prelucrare a informaiei nu se mai regsete n denumirea controlerului (Controler
Logic Programabil) ns denumirea se pstreaz n continuare: PLC.
PLC-uri Definiie, Limbaje standardizate, Structur, Funcionare
Termenul de PLC este definit prin IEC-1131: ,, Un sistem electronic (digital) de operare, proiectat
pentru utilizarea n mediul industrial, ce folosete o memorie programabil pentru stocarea intern a
instruciunilor necesare implementrii unor funcii specifice (logice, secveniale, temporizare,
contorizare, calcul matematic), pentru a controla prin intrrile i ieirile digitale i analogice diferite
tipuri de maini sau procese.
Aadar, un PLC este un computer proiectat pentru funcii de control.
Majoritatea PLC-urilor (Fig. 1.1b) permit montarea adiional a unor module prin care se
lrgete setul (numrul) de semnale procesate sau care mbogesc gama funciunilor: module de
intrare/ieire digitale i/sau analogice, module de poziionare, module de comunicaie etc.
Fig.1.1. PLC-uri : a) structur monobloc; b) structur modular.
a) b)
A3 Controlul Sistemelor Industriale I
A3 - Pag 3
Din punct de vedere funcional, n structura unui PLC se disting trei componente cu roluri bine
definite (Fig. 1.2):
modulele de intrare preiau semnalele din sistemul controlat prin intermediul senzorilor i le
convertesc n semnale logice pentru a putea fi prelucrate de CPU;
unitatea central de prelucrare(CPU) proceseaz semnalele primite pe baza instruciunilor unui
program, ia decizii i emite semnale numerice pe modulele de ieire n conformitate cu strategia de
control;
modulele de ieire convertesc semnale de la CPU n semnale de comand n scopul acionrii
diferitelor echipamente prin intermediul actuatorilor.
Programarea aplicaiilor se realizeaz n general pe un sistem de calcul auxiliar (PC) care
comunic cu PLC-ul printr-un port serial. Productorii controlerelor industriale asigur mediile software
de dezvoltare i implementare a aplicaiilor: STEP 7, FST, CX Programmer, RS Logix etc. Aceste medii
permit dezvoltarea aplicaiilor n diverse limbaje de programare, mai mult sau mai puin populare:
Ladder diagram, Statement list, Structured text, Sequential function chart etc. Unele PLC-uri sunt
prevzute suplimentar i cu dispozitive dedicate de programare i diagnosticare (console de
programare).
n funcionarea PLC-urilor se disting ca elemente specifice pentru aceste tipuri de structuri:
procesarea ciclic i imaginea de proces. Procesarea ciclic presupune parcurgerea programului ,,linie cu
linie i, dup prelucrarea ultimei instruciuni, reluarea prelucrrii de la nceput (Fig.1.3). Rularea ciclic
a programului va continua pn la comanda de oprire.
Imaginea de proces este o zon a memoriei n care este nregistrat configuraia intrrilor la
nceputul ciclului i n care se actualizeaz configuraia ieirilor pe parcursul rulrii unui ciclu.
Tabela de imagine
a intrarilor
Tabela de imagine
a iesirilor
Program PLC
INTRARI
IESIRI
CPU
UNITATEA CENTRALA DE
PRELUCRARE
MODULE
DE
INTRARE
MODULE
DE IESIRE
Fig.1.2. Structura unui PLC
Fig.1.3. Modul de funcionare al unui PLC
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 4
Aceste mod de funcionare presupune:
nainte de procesarea primei linii, starea (valoarea) intrrilor va fi nregistrat ntr-o tabel
imagine a intrrilor;
coninutul imaginii de proces a intrrilor nu se va modifica pe toat durata unui ciclu chiar dac
unele intrri se modific;
pe parcursul unui ciclu programul va accesa aceast memorie pentru citirea intrrilor;
pe msur ce ruleaz programul, n tabela imagine a ieirilor se nregistreaz starea (valoarea)
ieirilor;
la sfritul ciclului configuraia ieirilor se va modifica n acord cu valorile furnizate de memoria
imagine de proces;
un nou ciclu va presupune o nou nregistrare a strii intrrilor n memoria imagine i un nou
proces de actualizare a ieirilor cu execuie la sfritul ciclului.
Structura hardware a unui PLC
Structura hardware de principiu a unui PLC este prezentat n Fig. 1.4. n continuare se detaliaz
trei elemente importante ale acestora: unitatea central de procesare, memoria i interfeele de
intrare/ieire.
PLC-ul este un echipament electronic de automatizare care poate conduce un proces numai
dup efectuarea legturilor cu senzorii i cu elementele de execuie (actuatori), urmat de nscrierea
programului de lucru n memoria automatului. Legtura dintre PLC i procesul condus se asigur prin
intermediul interfeelor de intrare/ieire (module de intrare/ieire). Fiecare senzor trebuie conectat la o
interfa de intrare a automatului i fiecare actuator trebuie conectat la o interfe de ieire a
automatului.
Programul de lucru al PLC-ului se scrie ntr-un limbaj de programare adecvat, cu ajutorul unui
dispozitiv de programare (ex. PC). Programul se stocheaz n memoria automatului i execuia
programului este controlat de procesorul unitii centrale. Faptul c memoria automatului poate fi
tears i apoi ncrcat cu un nou program ori de cte ori se dorete, sau c programul din memorie
poate fi modificat dup dorin, ofer PLC-ului flexibilitate n utilizare.
PLC-ul este conceput totodat pentru funcionarea n mediu industrial: este insensibil la
perturbaii electromagnetice, poate funciona ntr-un domeniu larg de temperatur i de umiditate, este
compatibil direct cu procesul prin utilizarea unor semnale la tensiuni industriale etc.
Fig.1.4. Schema bloc a PLC-ului
A3 Controlul Sistemelor Industriale I
A3 - Pag 5
Unitatea central. Reprezint "creierul" automatului programabil i are rolul de a pune n
legtur interfaa de intrare, memoria de date i interfaa de ieire, pe baza programului descrcat de
utilizator n memoria program. Unitatea central interpreteaz instruciunile din memoria program, pe
baza crora efectueaz evaluri logice, calcule aritmetice, prelucrri numerice ale variabilelor de intrare
i furnizeaz un rezultat memoriei de date sau interfeei de ieire.
Memoria. Memoria PLC-urilor este alctuit din circuite electronice integrate care sunt capabile
s nregistreze informaii sub form binar (0 logic sau 1 logic). Informaia elementar este bit-ul,
denumire care provine de la "binary digit" din limba englez. Memoria joac un rol important n
funcionarea PLC-ului deoarece reprezint locul n care se nscrie programul de lucru al aplicaiei sub
forma unei liste de instruciuni. Procesorul citete din memorie instruciunile programului i le execut.
Memoria PLC-ului este organizat n: memoria de date i memoria program.
Memoria program pstreaz programul realizat i ncrcat de utilizator prin intermediul
calculatorului sau al consolei de programare. Memoria program este nevolatil, de tipul flash sau
EEPROM.
Memoria de date sau memoria de lucru, reprezint zona volatil a memoriei automatului
programabil. Aici sunt stocate rezultatele ale operaiilor efectuate de unitatea central sau valori
introduse de operator de la un terminal extern (consol de programare, terminal programabil) i care
sunt apoi prelucrate de ctre unitatea central.
Aceast zon de memorie poate fi asimilat memoriei RAM de la calculatoarele personale (PC-
uri). Majoritatea automatelor programabile sunt prevzute cu baterie pentru a pstra coninutul unor
zone din memoria de date i dup pierderea tensiunii de alimentare.
Din punctul de vedere a modului de stocare a informaiei nscrise n memorie se deosebesc dou
tipuri principale de memorii: memorii care pot fi terse (volatile); memorii care nu pot fi terse
(nevolatile). Ambele tipuri de memorii se utilizeaz n PLC-uri.
Module (interfee) de intrare/ieire. Comunicarea unui PLC cu aplicaia se realizeaz prin
intermediul canalelor de intrare i ieire (intrri, ieiri). Intrrile i ieirile unui PLC sunt necesare pentru
monitorizarea i controlul procesului i pot s fie de dou tipuri: logice sau continue. Intrrile vin de la
senzori care convertesc mrimile fizice n semnale electrice. Ieirile spre elementele de acionare permit
PLC-urilor s genereze o anumit aciune n proces.
Ansamblul modulelor electronice de intrare amplasate ntre bornele de intrare ale automatului
i magistrala intern constituie interfaa de intrare. Interfaa de intrare este prevzut cu un anumit
numr de canale de intrri logice sau analogice. Fiecrei intrari i se aloc o adres.
Modulele electronice amplasate ntre magistrala intern i bornele de ieire ale automatului
constituie interfaa de ieire. Modulele de ieire sunt adesea construite pe baz de relee, dar
deasemenea pot s includ, tranzistoare pentru ieirile de curent continuu sau triace pentru ieirile de
AC. Interfaa de ieire este prevzut cu un anumit numr de canale de ieiri logice sau analogice.
Fiecrei ieiri i se aloca cte o adres.
n PLC-urile monobloc intrrile i ieirile sunt integrate n aceeai unitate. Pentru PLC-urile
modulare intrrile sunt achiziionate prin module sau carduri. n Fig. 1.5 se arat cum se face
conectarea a dou intrri la un modul (card) de intrare. Ambele contacte (un buton de apsare i
contactul unui releu termic) sunt conectate de o sursa de curent alternativ. Cnd contactele sunt
nchise, se alimenteaz intrrile. Dac tensiunea de intrare pe o intrare este mai mare de o anumit
valoare, se va activa intrarea respectiv (trece n 1 logic).
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 6
Aici neutrul pentru alimentarea de la reea este nulul sau tensiunea de referin. Toate
tensiunile sunt msurate relativ la el. Dac exist o a doua alimentare, trebuie s legm nulurile
mpreun. Adesea nulul comun i masa pot fi confundate. Nulul este o referin, care se ntrebuineaz
pentru 0V iar masa este folosit pentru prevenirea ocurilor si distrugerea echipamentelor. Masa este
conectat la pmnt prin sistemul electric al unei cldiri (pmntarea). Din pcate muli ingineri i
fabricani amestec aceste legturi. Adesea masa si nulul sunt etichetate greit.
n general circuitele de intrare/ieire izoleaz unitatea central de aparatura extern prin
intermediul optocuploarelor (Fig. 1.6). Alte componente de circuit se folosesc pentru protecie la
supracreteri sau a inversrii polaritii.
Fig.1.5. Modul de intrare
(este utilizat notarea Allen Bradley pentru PLC-uri: I: 013 indic faptul c modul de
intrare e montat n rack-ul 01, slotul 3; 01 i 03 indic adresele intrrilor)
Fig.1.6. Circuite de intrare
A3 Controlul Sistemelor Industriale I
A3 - Pag 7
Fig.1.7. Circuite de ieire
Fig.1.8. Conectarea unui modul de ieire (24 Vdc). Considerm c alimentm circuitul extern cu
24V DC. Cnd ieirea 07 este activat curentul va trece prin 07 la COM, astfel nchiznd circuitul
i fcnd lampa sa se aprind. Ieirea 03 a releului este conectat n mod asemntor. Cnd
ieirea 03 este activat curentul va strbate bobina releului i motorul se va alimenta cu 120V AC.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 8
La fel ca i modulele de intrare, modulele de ieire rareori alimenteaz. Sunt construite pe baz
de relee, tranzistoare sau triace. Releele sunt capabile sa comute ntre ieirile AC i DC, dar sunt mai
lente (comutarea se face n jur de 10ms), cost mai mult i se uzeaz mai rapid. Tranzistoarele sunt
limitate pentru ieirile DC, triacele sunt limitate pentru ieirile AC, timpii de reacie fiind sub 1MS.
Ieirile de la PLC-uri trebuie s furnizeze tensiunile de acionare necesare. Cteva asemenea
circuite sunt detaliate n Fig. 1.7. Alte componente sunt folosite pentru protecie mpotriva curentului
excesiv sau a inversrii polaritii.
Fig.1.9. Conectarea unui modul de ieire (24 Vdc). Considerm c alimentm modulul (cardul) cu
24V DC. Cnd ieirea 07 este activat curentul va trece prin 07 la COM, astfel nchiznd circuitul
i fcnd lampa sa se aprind. Cnd ieirea 03 este activat curentul va strbate bobina releului i
motorul se va alimenta cu 120V AC.
A3 Controlul Sistemelor Industriale I
A3 - Pag 9
Limbajul industrial Ladder Diagram
Introducere
Ladder Diagram este un limbaj de programare grafic. n cea mai simpl form a sa, un program
LDR este asemntor cu imaginea unei diagrame de circuit electric de tip american. Aceasta este
similar cu diagrama de circuit electric German (standard DIN) dar se citete de la stnga la dreapta.
Elementele principale din LDR sunt contactele (contacts) i spirele (coils), n diferite forme i care
au diferite semnificaii. Ele sunt legate ntr-o secven logic cu ajutorul uror trasee grafice numite rungs
i branches care sunt similare cu conductoarele de legtur din circuitele electrice.
Subiectele dezvoltate n acest capitol sunt: operanzi, structura programelor LDR, operaii de
baz n LDR, temporizatoare, numrtoare, module de programare.
Operanzi
Operanzii LDR sunt identificatori ai resurselor sistemului: intrri, ieiri, timere, numrtoare, etc.
n cadrul unui program, utilizarea acestor operanzi este singurul mod de accesare a resurselor pe care le
reprezint. n funcie de dimensiunea lor exist doua tipuri de operanzi:
operanzi de un singur bit;
operanzi de mai muli biti - 8, 16 sau 32 de bii.
Memorarea valorilor operanzilor n cazul cderii tensiunii de alimentare a automatului se
numete retenie. Deoarece majoritatea operanzilor se gsesc n memoria RAM, n cazul unei cderi de
tensiune coninutul memoriei se pierde. Memoria este volatil.
Retenia este posibil dac automatul are n componen o baterie de siguran.
n cazul ieirilor, acestea nu trebuie s memoreze starea dinainte de cderea de tensiune, pentru a nu
pune n pericol instalaia la revenirea tensiunii. Deci ieirile sunt ntotdeauna localizate ntr-o memorie
volatil.
Se poate ntmpla s existe o cdere de tensiune i bateria de siguran s fie descrcat. Pentru
prevederea acestui defect se impune ca programele s aib seciuni n care s se iniializeze toi
operanzii importani pentru funcionarea sigur a instalaiei.
Structura unui program LDR
Un program LDR este constituit din ramuri principale (rungs). Fiecare ramur principal are
minim un contact. De asemenea fiecare ramur principal conine cel puin o spir (coil). Adiional,
ramuri paralele (branches) pot fi inserate rezultnd astfel contacte n paralel. Ramurile paralele pot fi
conectate la orice nod al ramurii principale cu condiia ca ele s nu se suprapun. Mai multe spire pot fi
configurate n paralel dar ele trebuie s aib toate o intrare de comand comun. Altfel se folosesc mai
multe ramuri principale.
2
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 10
Din ce este constituit o ramur principal?
Un program LDR conine: ramuri principale, ramuri paralele, seciuni de ramur, contacte
normal deschise i normal nchise, casete de instruciuni i spire. Aceti termeni se explic mai jos cu
ajutorul Fig. 2.1.
O caset de instruciuni poate fi folosit pentru a nlocui un contact sau o spir dar de obicei se
folosete pentru funcii care sunt imposibil de reprezentat grafic n LDR (de exemplu operaia aritmetic
de adunare a dou numere).
Ramurile prezentate n Fig. 2.1 conin numai operaii i de aceea reprezint doar o legtur
logic ntre elemente binare. Fiecare operaie (adic fiecare contact, spir sau caset de instruciuni)
necesit cel puin un operand. Dac operandul lipsete, atunci programul are erori care vor fi
evideniate la compilare. Operandul se scrie deasupra elementului grafic (contact/spir/caset).
Introducerea operandului se realizeaz prin editarea cmpului respectiv. n cazul casetelor de
instruciuini, este un lucru obinuit ca acestea s necesite mai mult de un singur operand.
Parte condiional i parte executiv
O ramur principal (rung) poate fi mprit ntr-o parte condiional i o parte executiv, Fig
2.2. n partea condiional se evalueaz la adevrat sau fals (1 sau 0) o funcie logic definit de
utilizator cu ajutorul contactelor i/sau al casetelor de comparaii logice. Spira reprezint partea
executiv, iar aciunile descrise de coninutul ei se declaneaz atunci cnd partea condiional a fost
evaluat ca adevrat, 1 logic.
Contact, normal
deschis
Caset de instruciuni
Ramur principal
Spir
Seciune care poate conine un contact
Ramuri paralele
Spire paralele
Contact, normal nchis
Fig.2.1. Elemente grafice de program LDR
A3 Controlul Sistemelor Industriale I
A3 - Pag 11
Funcionarea unei ramuri principale este identic cu cea a unui circuit electric de comand.
Sarcina electric (releul) este reprezentat de partea executiv a ramurii LDR. Partea condiional este
analoag contactelor electrice serie sau paralel.
Logica de procesare a unui program LDR
Programele LDR sunt executate n ordine, ramur dup ramur i ciclic, dup terminarea tuturor
ramurilor se rencepe execuia de la prima ramur. Programul se execut atta timp ct nu exist o
comand expres de oprire. Ramurile principale (rungs) sunt numerotate n mod automat de ctre
mediul de programare. Din acest motiv exist o secven clar de procesare a mai multor ramuri
principale. nainte de ncrcarea programului LDR n AP, programul este translatat n cod main cu
ajutorul unui program special numit compilator. Instruciunile cuprinse n ramuri sunt translatate
consecutiv, conform numerotrii i a ordinii apariiei n program. Chiar i n cadrul unei singure ramuri
principale, compilatorul va respecta secvena programat de utilizator. De exemplu, o a doua spir n
paralel va aprea n programul cod main ca fiind executat dup prima spir.
n cazul automatelor programabile multi-procesor, cea de-a doua spir va fi comutat dup
prima, cu o ntrziere de cteva microsecunde. Automate programabile cu un singur procesor folosesc,
n general, metoda imaginii de proces
1
pentru actualizarea intrrilor i iesirilor. La acestea, actualizarea
ieirilor fizice are loc independent de secvena de program conceput de utilizator, la sfritul fiecrui
ciclu al programului. Cnd se pornete automatul (cu ntreruptorul RUN/STOP sau prin alimentare cu
tensiune) instruciunile se execut de la prima linie de program.
Aceast logic secvenial este exploatat particular, atunci cnd se folosesc operanzii binari
speciali (ex.: FI, numit bit de initializare, initialization flag mediul FST). FI are valoarea 1 logic pentru
primul ciclu al programului. ncepnd cu al doilea ciclu i pn la oprirea automatului, operandul FI va
avea valoarea 0 logic. Cu ajutorul operandului FI este posibil aducerea oricrui operand n starea
iniial dorit la nceputul programului.
n Fig. 2.3, setarea n 1 logic a ieirii O0.1 se face doar pentru primul ciclu al programului.
Setarea n 1 logic a ieirii O0.2 se face ncepnd de la al doilea ciclu al programului i pn la oprirea
acestuia deoarece negaia lui FI are valoarea 0 logic n primul ciclu iar n rest are valoarea 1 logic.
1
Se detaliaz mai trziu n acest capitol.
Partea condiional
Partea de execuie
Fig.2.2. Partea condiional i partea de execuie a unei ramuri principale
Fig.2.3. Utilizarea operandului binar special, FI (initialization flag)
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 12
Modul de actualizare al intrrilor/ieirilor
Acelai program LDR poate fi rulat pe mai multe tipuri de automate programabile. Procesarea
intern a programelor LDR este diferit funcie de modul de actualizare de ctre AP a semnalelor de
intrare/ieire.
Astfel, automatele programabile cu un singur procesor, de obicei, folosesc un tampon de memorie
numit imagine de proces (process image). Funcionarea AP-urilor cu memorie de imagine de proces este
urmtoarea:
nainte de intrarea n ciclul unui program, n aceast memorie se ncarc valoarea semnalelor
fizice de intrare;
pe parcursul rulrii unui ciclu, valorile intrrilor sau ieirilor folosite n program sunt cele din
memoria imagini de proces (chiar dac pe parcursul ciclului unele intrri se pot schimba).
Imaginea de proces este actualizat cu comenzi de setare sau resetare a ieirilor;
la terminarea ciclului, ieirile fizice sunt actualizate corespunztor valorilor din imaginea de
proces. Dup aceasta ciclul se repet.
Observaii
Memoria cu imaginea de proces se actualizat i n cazul n care, n acelai program se
sare la o ramur principal anterioar celei curente (cu instruciune de salt).
Dac proiectul are mai multe programe LDR, imaginea de proces este actualizat nainte
de execuia primei ramuri principale a fiecrui program.
n Fig. 2.4 se poate observa schematic modul rulare a unui program LDR pentru un automat care
utilizeaz memorie cu imagine de proces, a), i pentru un automat fr imagine de proces, b).
Automatele programabile multiprocesor nu utilizeaz memorie pentru imaginea de proces.
Starea intrrilor fizice este citit imediat cum apar n partea condiional a ramurilor. Semnalele de
ieire sunt de asemenea actualizate imediat ce instruciunile din partea executiv sunt executate, ieirile
fizice fiind comutate nainte de terminarea ciclului. Ce nseamn acest lucru n practic se poate observa
cu ajutorul programului din Fig. 2.5. Acest program poate fi rulat pe orice tip de automat programabil
(cu un singur procesor sau cu mai multe procesoare). Programul nu are o utilitate practic deoarece
ieirea O0.1 este pur i simplu comutat n 1 i n 0 logic de mai multe ori pentru aceeai condiie
ndeplinit, dac intrarea I0.1 este activat.
Actualizarea
Imaginii de Proces
Ramura principal
nr. 1
Ramura principal
nr. 3
Ramura principal
nr. 2
Ramura principal
nr. 4
Ramura principal
nr. 1
Ramura principal
nr. 3
Ramura principal
nr. 2
Ramura principal
nr. 4
a) b)
Fig.2.4. Procesare cu imagine de proces, a) i fr, b).
A3 Controlul Sistemelor Industriale I
A3 - Pag 13
n acest caz, pentru un automat care utilizeaz imaginea de proces, ieirea O0.1 nu va fi
comutat de mai multe ori (din 1 n 0 logic sau invers). La terminarea unui ciclu al programului, ieirea
O0.1 va fi dezactivat dac I0.1 este 0 logic sau va fi activat dac intrarea I0.1 este 1 logic, deoarece
aceasta este ultimul lucru care se intmpl n comand, nainte de actualizarea imaginii de proces.
Pe de alt parte, un automat care acceseaz ntrrile i ieirile n mod direct (automatele multi-
procesor) va comuta ieirea O0.1 din 1 logic n 0 logic i invers de mai multe ori, pe msur ce se
execut fiecare instruciune. Aceste comutri se pot vedea cu un osciloscop.
Operaii de baz n programe LDR
Analog setului de instruciuni din limbajul STL, n LDR exist simboluri grafice ce au funcii bine
determinate. Operaiile executate de aceste funcii se detaliaz n acest paragraf. Pentru structurarea
informaiei, operaiile LDR se vor mprii n mai multe categorii.
Operaii logice
Funcia logic I pentru doi operanzi binari, I0.1 i I0.2, este reprezentat n Fig. 2.6.
Fig.2.6
Operaia logic SAU pentru doi operanzi binari, I0.1 i O0.2, este prezentat n Fig. 2.7.
Fig.2.7
Negaia unui operand binar se poate face n partea condiionat, Fig. 2.8, sau n cea de execuie,
Fig. 2.9. n primul caz Execuia are loc dac intrarea I0.1 este dezactivat. n al doilea caz ieirea O0.1
este activat cnd Condiie este neindeplinit (0 logic).
Fig.2.8
Fig.2.9
Fig.2.5. Program LDR exemplu pentru nelegerea lucrului cu memoria de imagine de proces
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 14
Funcia logic de identitate este una din operaiile de baz n LDR. Folosete o intrare i o ieire,
la fel ca funcia NU logic, dar valoarea de adevr a intrri se transmite la ieire, figura 2.10.
Fig.2.10
Funcia logic SAU EXCLUSIV este o condiie des utilizat n practic. LDR nu are un simbol grafic
special pentru aceast funcie. Funcia se realizeaz printr-o succesiune serie-paralel de contacte. n
figura 11 este prezentat operaia SAU EXCLUSIV ntre doi operanzi: I0.1 i I0.2. Instruciunea din partea
de Execuie se proceseaz dac numai una din cele dou intrri este activat.
Fig.2.11
Se pot realiza operaii SAU EXCLUSIV cu mai mult de dou variabile. n figura 2.12 se prezint
ramura de program LDR n care se evalueaz trei operanzi binari cu o funcie SAU EXCLUSIV.
Fig.2.12
Operaia NOP
Operaia special NOP este o operaie care nu face nimic. Toate limbajele de programare trebuie
s aib o operaie nul. n LDR, operaia NOP este utilizat ca operator ataat unui contact. n acest caz
contactul va fi totdeauna activat (1 logic) iar instruciunile din partea de execuie se vor executa la
fiecare ciclu de program, Fig.2.13.
Fig.2.13
Dac operatorul NOP este utilizat ntr-o ramur, aceasta nseamn c pentru acea ramur este
dezactivat mecanismul de recunoatere a frontului de semnal (tranziia din 0 n 1). De asemenea, acea
ramur este activ permanent. n Fig. 2.14 se d un exemplu de utilizare a funciei NOP la comanda de
incrementare a unui numrtor. Numrtorul va contoriza fiecare ciclu al programului. Dac se asociaz
acest numrtor cu un temporizator i se msoar timpul n care se execut, de exemplu 10000 cicluri,
se poate estima timpul de ciclu al unui program.
Fig.2.14
A3 Controlul Sistemelor Industriale I
A3 - Pag 15
Operaia de memorare (latching)
Aceast operaie seamn cu metoda tradiional de automeninere la utilizarea releelor de
ctre electricieni. Este o memorie de 1 bit. n automatele programabile, memoria de un bit se realizeaz
cu comenzile SET i RESET. Oricum, realizarea acestei memorii cu ajutorul contactelor se practic des n
programele LDR.
Simbolul logic pentru memoria de 1 bit este cel al unui circuit bistabil, Fig. 2.15.
Un circuit bistabil are dou intrri, S (set) i R (reset) i o singur ieire, A. Un semnal 1 logic n
intrarea S (set) provoac activarea ieirii A. Dup ce A a fost activat, el va rmne n aceast stare
indiferent de valoarea logic a intrrii S. Trecerea ieirii A n starea 0 logic se face prin activarea intrrii
R (reset). Dup dezactivarea lui A nu mai conteaz dac R i schimb starea. Dac semnalele R i S sunt
ambele 0 logic ieirea A i va menine starea anterioar. Se difereniaz dou tipuri de circuite
bistabile, corespunztor comportrii dorite a ieirii A n cazul n care semnalele R i S sunt 1 logic n
acelai timp:
cu resetare dominant, oricare ar fi starea intrrii S (0 sau 1 logic), activarea semnalului R va
provoca obligatoriu trecerea ieirii A n starea 0 logic;
cu setare dominant, oricare ar fi starea intrrii R (0 sau 1 logic), activarea semnalului S va
provoca obligatoriu trecerea ieirii A n starea 1 logic.
Pentru programarea unui circuit bistabil n LDR este nevoie de utilizarea a trei operanzi binari cu
condiia ca operandul echivalent semnalului A s poat fi modificat (flag de memorie sau ieire). Fig.
2.16. reprezint un circuit bistabil cu resetare dominant dat de operandul I1.2 i setare dat de
operandul I1.1. Semnalul analog ieirii bistabilului este flagul F3.1.
Fig.2.16
Circuitul bistabil cu setarea dominant este descris de Fig. 2.17. Setarea se face de ctre
intrarea I1.1 indiferent de valoarea ieirii I1.2. Resetarea se face cu semnalul I1.2 dar numai atunci cnd
intrarea I1.1 este 0 logic.
Fig. 2.17
1 0
1
S
R
A
1 1
1
S
R
A
Fig.2.15. Schema logic al unui circuit bistabil (memorie de 1 bit):
a) cu resetare dominant;
b) cu setare dominant.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 16
Operaii cu spire (coils)
Atunci cnd spirele sunt energizate se face diferen ntre comenzile care nu se pstreaz i
comenzile care se pstreaz.
Comenzi care nu se pstreaz
Pentru o comand care nu se pstreaz, starea logic a condiiei se transfer direct la spir. n
spir se reflect fiecare schimbare a strii logice a condiiei. n Fig. 2.18 se d comanda de activare a
ieirii O1.1 atunci cnd intrarea I1.1 este activat. n momentul n care intrarea I1.1 devine 0 logic
ieirea O1.1 va fi dezactivat (0 logic), Fig. 2.19.
Fig.2.18
n cazul acestui tip de comand exist i varianta de comand negat, Fig. 2.20, la care semnalul
de ieire O1.1 este activat dac intrarea I1.1 este 0 logic i este dezactivat dac intrarea I1.1 are starea
1 logic, conform diagramei din Fig. 2.21.
Fig.2.20
timp
I1.1 - Condiie
O1.1 - Execuie
1 logic
0 logic
timp
I1.1 - Condiie
O1.1 - Execuie
1 logic
0 logic
Fig.2.21. Activarea i dezactivarea ieirii O1.1 funcie de semnalul de intrare I1.1,
n cazul unei comenzi negate care nu se pstreaz
Fig.2.19. Activarea i dezactivarea ieirii O1.1 funcie de semnalul de intrare I1.1,
n cazul unei comenzi care nu se pstreaz
A3 Controlul Sistemelor Industriale I
A3 - Pag 17
Comenzi care se pstreaz
n acest caz comenzile sunt executate precis dac (i numai dac) ramura are starea 1 logic,
adic condiia ramurii este ndeplinit. Dac condiia trece din starea 1 logic n starea 0 logic,
comanda executat de spir nu se va anula. Exist dou tipuri de comenzi care se pstreaz: SET i
RESET.
Ele sunt comenzi opuse n sensul c se anuleaz una pe cealalt dac se aplic aceluiai operand.
n Fig. 2.22 se poate vizualiza tipul de spir Set. Ieirea O1.1 este activat cnd intrarea I1.1 devine
pentru prima oar 1 logic, Fig. 2.24.a.
Schimbri ulterioare ale intrrii I1.1 nu mai influeneaz ieirea O1.1. Dac ieirea O1.1 a fost
dezactivat din alt parte a programului, la execuia urmtoare a acestei ramuri ieirea O1.1 poate fi
activat din nou, dac intrarea I1.1 este 1 logic.
Tipul de spir Reset este prezentat n Fig. 2.23. Acesta are efect invers, aa cum se vede din
diagrama 2.24.b.
Fig.2.22
Fig.2.24
a) b)
O comand care nu se pstreaz poate fi realizat cu dou comenzi care se pstreaz: SET i
RESET, dup cum se observ n Fig. 2.25. Efectul este cel din diagrama 2.26 i este identic cu cel al unei
comenzi care nu se pstreaz (cea din Fig. 2.18).
Fig.2.25
timp
I1.1 - Condiie
O1.1 - Execuie
1 logic
0 logic
timp
I1.1 - Condiie
O1.1 - Execuie
1 logic
0 logic
Fig.2.24. Activarea ieirii O1.1 funcie de semnalul de intrare I1.1, n cazul unei comenzi
care se pstreaz: a) comand SET; b) comand RESET
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 18
Operaia de salt
Comanda de salt apare n partea executiv a unei ramuri. Ea ofer posibilitatea de scurtare a
timpului de ciclu al unui program prin saltul peste instruciunile din program inutile la un moment dat, n
decursul aplicaiei. La urmtorul ciclu, instruciunile peste care s-a efectuat saltul pot fi executate, dac
starea sistemului automatizat o impune.
O comand de salt se insereaz n partea executiv a unei ramuri i conine o etichet (label)
care reprezint destinaia saltului, adic punctul din program de unde se execut urmtoarea
instruciune.
Eticheta reprezint un ir oarecare de maxim 9 caractere alfanumerice, date de utilizator, i care
trebuie s nceap cu o liter. Nu se face diferen ntre litere mari i litere mici. Pentru a stabili
destinaia unui salt, eticheta trebuie inserat n ramura de interes, la nceputul prii condiionale.
Dac exist o comand de salt la o etichet anume, de exemplu motor3, i eticheta nu apare
undeva n program, la nceputul prii condiionale al unei ramuri, atunci se va semnala o eroare de
sintax la compilarea programului.
O comand de salt n LDR arat ca n Fig. 2.27. Ea reprezint un salt condiionat, care se execut
numai dac partea condiional a ramurii este adevrat.
Fig.2.27
Un salt necondiionat se realizeaz cu ajutorul operandului NOP, ca n Fig. 2.28.
Fig.2.28
timp
I1.1 - Condiie
I1.1 negat - Condiie
1 logic
0 logic
O1.1 - Execuie
Fig.2.26. Activarea i dezactivarea ieirii O1.1 funcie de semnalul de intrare I1.1, n cazul a
dou comenzi opuse care se pstreaz. Semnalul O1.1 este identic cu cel din fig. 2.18
A3 Controlul Sistemelor Industriale I
A3 - Pag 19
Observaie
O comand de salt nu nlocuiete o spir (coil). Trebuie s existe cel puin o spir n fiecare
ramur. Dac se dorete doar un salt ca rezultat al unei condiii, trebuie utilizat un flag (care nu este util
n program) ca operand pentru spir.
Inserarea etichetei n partea condiional a unei ramuri se face ca n Fig. 2.29. Eticheta este
motor3 i a fost folosit mai sus la comanda de salt.
Fig.2.29
Observaie
Utilizarea unei etichete n partea condiional a unei ramuri nu nlocuiete un contact. Trebuie
s existe cel puin un contact n partea condiional a fiecrei ramuri.
Operaia LOAD TO
LOAD TO este o operaie utilizat cu operanzi muti-bit (16 bii). Instruciunea LOAD ncarc n
acumulatorul MBA coninutul unui operand multi-bit. Din MBA se poate copia acel coninut n orice
operand multi-bit (mai puin la intrri) cu ajutorul instruciunii TO.
Caseta grafic LDR prezentat n figura 30 realizeaz automat cele dou instruciuni. Ea copiaz
valoarea constant 12 n memorie, la adresa FW5. Aceeai comand se poate executa i cu o caset
aritmetic/logic.
Fig.2.30
Operaii aritmetice
Casetele pentru operaii aritmetice fac parte din setul de casete pentru operaii binare multi-bit.
Ele apar ntotdeauna n partea executiv a unei ramuri. Casetele aritmetice acoper cele patru operaii
de baz: adunarea, scderea, nmulirea i mprirea. n Fig. 2.31 se d cte un exemplu de utilizare a
celor patru operaii de baz. Operanzii se introduc unul sub altul. n ultimul operand, al treilea, se
ncarc rezultatul operaiei aritmetice.
Aceleai operaii se mai pot efectua i cu o caset aritmetic/logic.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 20
adunare
scdere
nmulire
mprire
Alte operaii binare multi-bit
n afar de operaiile aritmetice mai exist disponibile urmtoarele operaii binare multi-bit:
rotirea biilor spre dreapta (sau spre stnga): ROR (ROL);
translatarea tuturor biilor spre dreapta (sau spre stnga): SHR (SHL);
conversia unui numr din reprezentare binar n reprezentare BCD (Binar Codat Decimal): BI D;
conversia unui numr din reprezentare BCD n reprezentare binar: DEB;
operaii logice bit cu bit ntre doi operanzi multi-bit: SI, SAU, SAU EXCLUSIV;
schimbarea ntre ei a valorilor octeilor MSB i LSB ai unui operand multi-bit (16 bii): SWAP;
complementul n baza doi al unui operand multi-bit: CPL;
inversul, bit cu bit, al unui operand multi-bit: I NV.
Fiecare din aceste operaii necesit doi operanzi multi-bit. Primul operand este sursa (asupra lui
se exercit funcia) iar al doilea este destinaie (n el se nregistraz rezultatul operaiei). C este aa se
observ din Fig. 2.32, unde se folosete operaia de rotire spre stnga cu un bit (ROL) a coninutului
operandului IW1. Rezultatul se nregistreaz n operandul FW3.
Sursa i destinaia pot fi reprezentate de acelai operand, cu condiia ca acesta s nu fie un
cuvnt de intrare (la intrri nu se poate scrie).
Fig.2.32
Toate aceste operaii sunt utile n rezolvarea eficient a unor probleme mai complexe de
automatizare.
Operaii cu caset aritmetic/logic (A/L)
Casetele A/L sunt folosite, la fel ca i cele de operaii multi-bit, numai n partea executiv a
ramurilor. Ele permit o programare coerent de operaii complexe care folosesc operanzi multi-bit.
Pentru multe din operaiile care se pot efectua cu casete A/L exist casete LDR speciale dar acestea
realizeaz o singur operaie (de exemplu adunarea a doi operanzi multi-bit).
Fig.2.31. Exemple de casete de operaii aritmetice
A3 Controlul Sistemelor Industriale I
A3 - Pag 21
Operaii de incrementare i decrementare
Se folosesc n partea executiv iar forma grafic de reprezentate LDR este o spir (coil). Operaia
de incrementare modific valoarea unui operand multi-bit cu + 1.
Operaia de decrementare modific valoarea unui operand multi-bit cu 1.
Se folosesc de obicei pentru actualizarea numrtoarelor dar se pot aplica oricrui operand multi-bit cu
excepia intrrilor. Fig. 2.33 prezint operaia de incrementare a operandului FW5.
Fig.2.33
Comanda de incrementare se execut doar cnd starea logic a prii condiionale trece din 0
logic n 1 logic, adic numai pe frontul cresctor al semnalului Condiie. Fig. 2.34 arat modificrile
operandului FW5 la un semnal oarecare al prii condiionale. Se consider c la nceput valoarea din
FW5 este 0.
Operaii de comparaie multi-bit
Permit comparaii cu rezultat logic (adevrat sau fals) ntre operanzi multi-bit. Sunt operaii de
baz pentru orice tip de automat programabil. Comparatorii multi-bit permit evaluarea relaiei dintre
doi operanzi (valori pe 16 bii), evaluarea numrtoarelor, comparaii ntre un operand i o valoare
constant, etc.
Exist 6 tipuri de comparaie ntre doi operanzi multi-bit :
egal (=);
mai mare(>);
mai mare sau egal (>=);
mai mic (<);
mai mic sau egal (<=);
diferit (<>);
Comparaiile multi-bit sunt reprezentate cu casete (box) i se folosesc n partea condiional a
unei ramuri LDR. n caset trebuiesc specificai doi operanzi. Valoarea lor este comparat conform
tipului de caset (=, >, >=, <, <=, <>) iar valoarea de adevr se transmite mai departe n partea
condiional a ramurii.
timp
Condiie
Valoare FW5
1 logic
0 logic
1
2
3
Fig.2.34. Incrementare
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 22
Fig. 2.35 prezint comparaia de egalitate ntre intrarea OW1 i registrul R2. Dac valorile lor
sunt egale atunci se va procesa comanda descris de Execuie.
Fig.2.35
Un exemplu mai complex este dat n Fig. 2.36. Dac toate cele trei comparaii sunt adevrate, se
proceseaz comanda Execuie.
Fig.2.36
Observaie
Cu aceste casete se poate nlocui funcia NOP. De exemplu, relaia 1 > 0 este ntotdeauna
adevrat, putndu-se folosi n locul contactului cu operandul NOP.
Utilizarea temporizatoarelor n limbajul LDR
Automatele programabile moderne au ncorporate funcii specializate pentru lucrul cu
temporizatoare. Numrul de module de temporizare care se pot folosi n acelai timp difer de la un
automat programabil la altul. Pentru FEC acestea sunt n numr de 256, numerotate de la 0 la 255.
Tehnologie
Temporizatoarele sunt construite pe baza numrtoarelor, singura diferen fiind c acestea
numr impulsuri de ceas de ordinul milisecundelor. Baza de timp a ceasului intern (durata ntre dou
mpulsuri) este o caracteristic a fiecrui tip de AP. La unele automate ea poate fi aleas de utilizator din
mai multe opiuni, de exemplu: 10 ms, 100 ms sau 1 s. Pentru automatele FESTO, baza de timp este de
10 milisecunde (0,01 secunde).
Cnd se programeaz un temporizator, se ncarc un numr ntr-un operand de 16 bii numit
Timer Preselect (TP). Acest numr se decrementeaz la fiecare impuls de ceas. Cnd numrul ajunge la
zero, timpul programat a expirat. Aceast tehnic de msurare a timpului lucreaz foarte eficient i este
larg utilizat n construcia ceasurilor cu cuar. Un numrtor numr impulsuri electrice de la un cristal
de cuar. Tehnica este cunoscut ca msurare digital a timpului.
Eroare de msur
Msurarea digital a timpului implic o eroare sistematic de msur. Eroarea poate fi de maxim
o unitate a bazei de timp. Ea apare datorit faptului c ceasul intern funcioneaz independent de
programul utilizatorului. Semnalul ceasului este folosit de temporizator dar pornirea ceasului se face
nainte de rularea primului program. Din aceast cauz pot apare situaii ca cea prezentat n Fig. 2.37,
n care se explic apariia unei erori de aproape o baz de timp.
A3 Controlul Sistemelor Industriale I
A3 - Pag 23
Totui exist i un avantaj al acestei tehnici, i anume, toate temporizatoarele folosesc acelai
semnal de ceas i deci aceeai baz de timp.
Limite de temporizare
Cel mai mic timp care poate fi msurat este de 2 pulsuri de ceas. Eroarea maxim la aceast
temporizare poate fi de 50%. O temporizare de 1 puls ar putea provoca o eroare de 100% i de aceea nu
este permis la unele automate programabile.
Cea mai mare temporizare care se poate obine cu un singur temporizator depinde de mrimea
n octei a operandului n care se ncarc numrul de impulsuri ce trebuie numrate. Pentru un operand
de 16 bii (2 octei), numrul maxim reprezentat n baza doi este 65535. La o baz de timp de 0.01s
aceasta nseamn 655 de secunde, adic aproximativ 10 minute.
Temporizri mai mari se pot realiza utiliznd tehnica n cascad. Pentru aceasta se folosesc
mpreun un numrtor i un temporizator. n acest caz temporizarea maxim este de 65535 x 655
secunde adic aproximativ 496 zile.
Componentele unui temporizator
Un temporizator este o structur de date care lucreaz ca un tot unitar. Aceast structur
trebuie s conin minim trei operanzi. Referindu-ne la timerul n, acetia sunt:
Tn Timer Status este un operand de un bit (SBO) care reprezint starea timer-ului. Acest
operand poate fi interogat n orice moment pentru valoarea sa logic. De asemenea el poate fi
activat i dezactivat cu operaiile SET respectiv RESET;
TPn Timer Preselect este un operand multibit (MBO) de un word (16 bii) care reprezint
valoarea setat de utilizator n uniti de intervale de timp. Activarea sau dezactivarea
Semnal de ceas
Semnal de ieire
al temporizatorului
Baz de timp
de 1 secund
Decrementare
cu 1 unitate
Timp
Timpul msurat efectiv: 2s < t < 3s
Timpul dorit pt. temporizare: 3s
Comanda de start
a temporizrii
Utilizarea n program
a semnalului de sfrit
de temporizare.
Fig.2.37. Pornirea temporizatorului T1, setat pentru 3 baze de timp, i momentul dezactivrii
acestuia funcie de semnalul de ceas. Temporizatorul se decrementeaz la fiecare trecere din
1 logic n 0 logic a semnalului de ceas.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 24
temporizatorului Tn nu are influen asupra operandului TPn. Setarea unei valori n TPn se face
explicit cu o instruciune de ncrcare;
TWn Timer Word este un operand multibit (MBO) de un word (16 bii) care reprezint
valoarea curent a timer-ului. Acest operand nu conine un numr stabil. La activarea
temporizatorului valoarea TPn se ncarc automat n TWn. Acest numr va fi apoi decrementat
(tot automat) la fiecare impuls de ceas. Cnd TWn ajunge la zero timpul a expirat.
ntr-un program, temporizatoarele trebuie s fie pornite i interogate:
Pornirea unui temporizator n limbajul LDR se face cu ajutorul unei casete speciale, n partea
executiv a unei ramuri;
Interogarea unui temporizator n limbajul LDR se face cu un contact obinuit n care operandul
este bitul de stare al temporizatorului, n partea condiional a unei ramuri.
Pentru toate tipurile de temporizatoare prezentate n continuare, caseta de pornire este
activat la trecerea din 0 logic n 1 logic a semnalului din partea condiional a ramurii n care aceasta
s-a introdus.
A3 Controlul Sistemelor Industriale I
A3 - Pag 25
Tipuri de temporizatoare
Exist trei tipuri de temporizatoare, analog celor utilizate n industria electrotehnic ca relee de
temporizare:
Temporizatorul simplu T;
Temporizatorul cu ntrziere la aclanare TON;
Temporizatorul cu ntrziere la declanare TOFF.
Temporizatorul simplu, T
Se activeaz la trecerea din 0 logic n 1 logic a semnalului din partea condiional a ramurii.
Odat iniiat, temporizatorul msoar durata de timp prestabilit iar cnd aceasta a expirat
temporizatorul se dezactiveaz. Dac pe parcursul temporizrii n partea condiional apare un nou
front cresctor (din 0 logic n 1 logic) temporizatorul este reiniiat.
Funcionarea acestui tip de temporizator se poate observa i din Fig. 2.38.
Temporizatorul T msoar intervalul de timp prestabilit att timp ct n partea condiional nu apare un
nou front cresctor. Bitul de stare T este 1 logic n timpul msurrii iar dup expirarea timpului devine
0 logic.
Starea prii condiionale
Bitul de stare al temporizatorului, T
1
0
1
0
t
Condiia este
ndeplinit (frontul
cresctor).
Temporizatorul este
activat (T = 1) i n
acest moment TP se
ncarc n TW. Dup
ncrcare TW va fi
decrementat la
fiecare impuls de
ceas.
Aici condiia este
ndeplinit din nou.
Temporizatorul
rmne activ (T = 1)
dar este reiniializat
(TP este rencrcat n
TW). Timpul este
msurat de la
nceput.
Dup ultimul front
cresctor al
condiiei aceasta nu
s-a mai dezactivat.
Timpul msurat a
expirat (TW = 0) i
temporizatorul s-a
auto-dezactivat. De
aici el va rmne
inactiv (T = 0).
Din acest punct
temporizatorul
este gata pentru
o nou
temporizare.
Fig.2.38. Funcionarea temporizatorului de tip T
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 26
Temporizator cu ntrziere la anclanare, TON
Se activeaz la trecerea din 0 logic n 1 logic a semnalului din partea condiional iar dup
expirarea timpului, bitul de stare TON devine 1 logic. Rmne 1 logic pn la trecerea dezactivarea
semnalului din partea condiional. Dac timpul (t) nu a expirat iar partea condiional se dezactiveaz
(Condiie = 0 logic) atunci temporizatorul este reiniializat iar bitul de stare TON rmne n aceeai stare
(0 logic). Fig. 2.39 exemplific toate combinaiile ntre semnalul din partea condiional i starea
temporizatorului de tip TON.
Starea prii condiionale
1
0
1
0
t
Condiia este
ndeplinit (frontul
cresctor).
Temporizatorul este
activat (TON = 0) i n
acest moment TP se
ncarc n TW. Dup
ncrcare TW va fi
decrementat la fiecare
impuls de ceas.
Aici condiia este
ndeplinit din nou.
Temporizatorul
rmne activ
(TON = 0) dar este
reiniializat (TP este
rencrcat n TW).
Timpul este msurat
de la nceput.
Dup ultimul front
cresctor al
condiiei aceasta nu
s-a mai dezactivat.
Timpul msurat a
expirat (TW = 0) i
temporizatorul s-a
auto-dezactivat. De
aici el va rmne
inactiv (TON = 1).
Din acest punct
temporizatorul
este gata pentru
o nou
temporizare.
Bitul de stare al temporizatorului, TON
Temporizatorul TON msoar intervalul de timp prestabilit att timp ct partea condiional este activ
(1 logic). Bitul de stare TON este 0 logic n timpul msurrii iar dup expirarea timpului devine (1 logic).
Temporizator cu ntrziere la declanare, TOFF
Se activeaz la trecerea semnalului din partea condiional din 0 logic n 1 logic(TOFF = 1
logic). La dezactivarea semnalului din partea condiional (front descresctor) temporizatorul ncepe s
msoare durata de timp prestabilit. n acest timp bitul de stare TOFF rmne 1 logic. Dup expirarea
timpului TOFF devine 0 logic. Dac timpul nu a expirat dar partea condiional se activeaz (Condiie =
1 logic) atunci temporizatorul se va reiniializa iar bitul TOFF va rmne setat (1 logic). Fig. 2.40
exemplific toate combinaiile ntre semnalul din partea condiional i starea temporizatorului de tip
TOFF.
Fig.2.39. Funcionarea temporizatorului de tip TON
A3 Controlul Sistemelor Industriale I
A3 - Pag 27
Starea prii condiionale
1
0
1
0
t
Condiia este
ndeplinit (frontul
cresctor).
Temporizatorul este
activat (TOFF = 1)
i din acest moment
TP se ncarc n TW.
n mod continuu.
Aici condiia de ncepere a
temporizrii este ndeplinit
(Condiie = 0).
Temporizatorul rmne activ
(TOFF = 1) dar ncepe
temporizarea (TW este
decrementat).
Dup ultimul front
cresctor al condiiei
aceasta nu s-a mai
dezactivat. Timpul msurat
a expirat (TW = 0) i
temporizatorul s-a auto-
dezactivat. De aici el va
rmne inactiv (T = 0).
Din acest punct
temporizatorul
este gata pentru
o nou
temporizare.
Bitul de stare al temporizatorului, TOFF
Temporizatorul TOFF msoar intervalul de timp prestabilit att timp ct partea condiional este
inactiv (0 logic). Bitul de stare TOFF este 1 logic n timpul msurrii iar dup expirarea timpului devine
(0 logic).
Exemple de programare cu temporizatoare TON, TOFF i T
Exemplul 1
Un bec trebuie s se aprind dup ce un buton a fost apsat timp de 5 secunde. Becul trebuie s
se sting atunci cnd butonul este eliberat.
Temporizator
TON
Temporizator
TOFF
Fig.2.40. Funcionarea temporizatorului de tip TOFF
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 28
Temporizator
T
Exemplul 2
Un bec trebuie s se aprind atunci cnd un buton este apsat. Dup eliberarea butonului becul
trebuie s mai rmn aprins 5 secunde.
Temporizator
TON
Temporizator
TOFF
Temporizator
T
Exemplul 3
Un bec trebuie s se aprind i s se sting la intervale de 1 secund atta timp ct este apsat
un buton.
Temporizator
TON
Temporizator
TOFF
A3 Controlul Sistemelor Industriale I
A3 - Pag 29
Temporizator
T
n Fig. 2.41 se arat o alt rezolvare a exerciiului 3 n care se folosete o caset de comparaie
pentru operandul TW al temporizatorului, T, utilizat. Se temporizeaz n continuu un interval de timp de
2 secunde. La mijlocul acestui interval, starea becului este comutat conform condiiei n care apare
caseta de comparaie.
Utilizarea numrtoarelor n limbajul LDR
Limbajul LDR implementat pe automatele FESTO poate utiliza dou tipuri de numrtoare:
incrementale i decrementale. Pentru FEC sunt disponibile 256 de numrtoare, numerotate de la 0 la
255.
Numrtoarele, n general, trebuie s asigure urmtoarele funciuni:
s numere impulsuri i s memoreze rezultatul n propria memorie (valoarea curent);
s ofere posibilitatea, la orice moment de timp, de scriere n valoarea curent a unei valori
iniiale (resetare);
s aib o memorie proprie pentru valoarea prestabilit (maxim) de impulsuri care trebuie
numrate;
s poat fi interogat (din punct de vedere logic) dac a atins sau nu a atins numrul de impulsuri
prestabilit, pentru a folosi rezultatul n alte operaii logice.
Pentru ndeplinirea acestor funcii, numrtoarele automatelor programabile sunt formate din
mai multi operanzi care lucreaz mpreun ca un tot unitar. n automatele FESTO, numrtoarele sunt
structuri de date formate din trei operanzi. Pentru cazul general al unui numrtor oarecare cu numrul
n, acetia sunt:
Cn Counter Status;
CPn Counter Preselect;
CWn Counter Word.
Fig.2.41. Temporizator T cu comparaie pentru operandul TW
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 30
Cn Counter Status este un operand de un bit (SBO) n care se memoreaz starea
numrtorului. Operandul Cn poate fi interogat n orice parte condiional a programului.
CPn Counter Preselect este un operand multibit (MBO) de un cuvnt n care se ncarc
valoarea setat (prestabilit) de utilizator. Acest operand rmne neschimbat n timpul numrrii.
Schimbarea valorii CPn se efectueaz o singur dat, la iniializare. Operandul CPn poate fi iniializat cu o
valoare constant sau cu valoarea coninut n orice alt operand multibit (IWn, FWn, etc.). n cazul
valorilor constante, limitele de variaie ale acestora pot fi:
V0 V65535, ntreg zecimal de 16 bii, fr semn;
V 32268 V32267, ntreg zecimal de 16 bii, cu semn;
V$0000V$FFFF, ntreg reprezentat n baza 16 (hexazecimal).
CWn Counter Word este un operand multibit (MBO) de un cuvnt n care se gsete
valoarea curent a numrtorului.
Utilizarea numrtoarelor
nainte de utilizarea unui numrtor acesta trebuie iniializat. n LDR, iniializarea se face cu o
caset special n care se introduc doi operanzi: adresa numrtorului i valoarea prestabilit, Fig. 2.42.
Fig.2.42. Caseta de iniializare a unui numrtor
Activarea numrtoarelor se face cu o comand SET, de spir, Fig. 2.43. Pentru numrtoare
incrementale, la activare se ncarc valoarea 0 n CWn. Aceast operaie se efectueaz automat la
activarea numrtorului.
Fig.2.43. Comanda de activarea unui numrtor
De fiecare dat cnd se activeaz un numrtor, de exemplu numrtorul 2, se efectueaz
urmtoarele aciuni:
Valoarea operandului Counter Word, CW2, este ncrcat cu valoarea 0 (pentru numrtoare
incrementale);
Bitul Couter Status, C2, este setat la 1 logic.
Dac numrtorul C2 este deja activ i se reactiveaz atunci numrtorul este repornit prin
ncrcarea valorii 0 n CW2.
Numrtorul activat i meninea valoarea (C2 = 1 logic) pn la apariia uneia din situaiile de
mai jos:
numrtorul se reseteaz cu o comand explicit, Fig. 2.44;
dup incrementri succesive ale operandului CW2, acesta devine egal cu valoarea setat: CW2 =
CP2;
dup decrementri succesive ale operandului CW2, acesta devine 0.
A3 Controlul Sistemelor Industriale I
A3 - Pag 31
Dup apariia oricreia din situaiile de mai sus numrtorul se dezactiveaz (Cn=0 logic).
Fig.2.44. Comanda de dezactivare a unui numrtor
Activarea unui numrtor decremental se face cu comanda LOAD TO n care valoarea
prestabilit se ncarc n operandul CW al numrtorului. Dup aceast operaie bitul de stare al
numrtorului decremental este setat automat n '1 logic', Fig. 2.45.
Fig.2.45. Activarea unui numrtor decremental. Iniializarea se face cu numrul constant 25.
Numrarea este o operaie care se realizeaz n partea executiv a unei ramuri i pentru care se folosesc
spirele speciale INC i DEC. Cnd se utilizeaz spira INC numrtorul este incrementat (+ 1), fig. 46.
Pentru DEC numrtorul este decrementat ( 1).
Fig.2.46. Comanda de incrementare a unui numrtor
IMPORTANT!
Ceea ce se numr este frontul cresctor al semnalului condiional (schimbarea din 0 n 1 logic) i nu
semnalul continuu.
Interogarea unui numrtor n partea condiional a unei ramuri se face simplu, cu ajutorul unui
contact al crui operand este bitul de stare al numrtorului, fig. 2.47.
Fig.2.47.a. Interogarea unui numrtor pentru 1 logic (numrtor activat)
Fig.2.47.b. Interogarea unui numrtor pentru 0 logic (numrtor dezactivat)
Exemple de utilizare a numrtoarelor
Exemplul 1
Dup ce un numrtorul C0 numr 10 semnale la intrarea I0.3, trebuie s se aprind un bec.
Numrtorul poate fi activat cu un buton la intrarea I0.1. n figura 48 este prezentat programul pentru
un numrtor incremental. Pentru un numrtor decremental se folosete metoda prezentat n
figura 2.49.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A3 - Pag 32
Fig.2.48. Program LDR pentru numrtor incremental
Prima ramur iniializeaz numrtorul, imediat dup pornirea programului. Aceasta este
necesar, altfel becul s-ar aprinde de la prima rulare a programului.
Fig.2.49. Program LDR pentru numrtor decremental
Exemplul 2
ntr-o parcare de maini exist doar 10 locuri. La intrarea n parcare exist un semnalizator optic
cu dou becuri: unul verde i unul rou. Becul verde trebuie s rmn aprins atta timp ct n parcare
mai sunt locuri libere. Becul rou se aprinde cnd parcarea este plin. Cele dou becuri nu pot fi aprinse
n acelai timp. Programul pentru acest exerciiu este prezentat n figura 50, senzorul de la intrarea n
parcare este conectat la intrarea I0.5 iar cel pentru ieire la intrarea I0.6.
Fig.2.50. Program LDR pentru semnalizare n trafic c o parcare are sau nu are locurilor libere
A4 - Pag 1
Controlul
Sistemelor Industriale II
1. Proiectarea Logic Structurat
2. Metoda Biilor Secveniali
3. Metoda Grafcet
Proiectarea Logic Structurat
Tradiional, proiectarea unei aplicaii utiliznd LDR presupune o faz preliminar de analiz a
procesului/sistemului de controlat iar apoi scrierea programului/codului ntr-un anumit mediu care s
permit implementarea reelelor/diagramelor Ladder. Acest mod de abordare scrierea codului fr o
faz de proiectare structurat conduce obligatoriu la o etap costisitoare/ndelungat de remediere a
disfunciunilor. n mod paradoxal, timpul alocat realizrii unei aplicaii printr-o proiectare structurat,
corect, temeinic este mai scurt dect timpul alocat printr-o proiectare superficial. O comparaie
sugestiv este realizat n Tabelul 1.
Tabel 1. Analiz comparativ
Fazele procesului de proiectare
Caz 1:Analiz
superficial
Caz 2: Proiectare
structurat
Timp alocat fazei de proiectare 10% 40%
Timp alocat scrierii programului/codului 30% 10%
Timp alocat remedierii disfunciunilor i testelor 50% 10%
Timp alocat scrierii documentatiei 10% 10%
Timp total alocat conceperii aplicaiei T1* T2=0.7 T1
* toate evalurile procentuale sunt raportate la timpul T1
n general procesele industriale sunt secveniale, adic funcionarea/desfurarea lor poate fi
descris prin intermediul unor faze/stri care se succed funcie de anumite condiii sau comenzi.
Metodele utilizate pentru proiectarea logic structurat a funciilor/strategiei de control sunt diverse iar
aplicabilitatea lor este determinat de complexitatea sistemului controlat. Cele mai populare tehnici de
proiectare secvenial, n ordinea complexitii proceselor ce pot fi soluionate, sunt: Metoda biilor
A4
1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 2
secveniali (procese simple), Diagramele de flux, Diagramele de stare, Reele Petri, Diagramele
functionale secveniale (procese complexe).
Metoda Biilor Secveniali
Metoda se aplic n general proceselor secveniale simple cu faze i condiii funcionale foarte
clare. Principial metoda se bazeaz pe asignarea unor bii de memorie fiecrei faze/stri importante a
procesului, respectiv pe lansarea n execuie a fiecrei faze prin activarea bitului de memorie
corespunztor. Trecerea de la o faz la alta este determinat de satisfacerea condiiilor funcionale ale
procesului.
Etapele de lucru n aplicarea metodei de proiectare sunt:
nelegerea procesului se studiaz i se analizeaz amnunit sistemul sau procesul controlat;
I dentificarea fazelor procesului se identific clar etapele/fazele de funcionare ale procesului
(dou faze succesive sunt separate printr-o condiie de trecere);
I dentificarea condiiilor funcionale se identific clar condiiile necesare lansrii n execuie a
fiecrei faze a procesului (ex: condiiile de trecere de la o faz la alta) ;
Asignarea biilor secveniali fiecrei faze i se asociaz un bit (o unitate de memorie);
Scrierea programului utiliznd diagramele Ladder se implementeaz fazele procesului,
respectiv modul (funciile) de trecere de la o faz la alta n ordinea mpus de process;
Verificarea, testarea programului se ruleaz/testeaz aplicaia n toate situaiile de
funcionare prevzute n tema de proiectare. Se implementeaz msuri suplimentare de
securitate a aplicaiei (dac este cazul).
Descrierea Metodei
n cazul proceselor foarte clare (simple) n care fazele procesului sunt iniiate prin intermediul
condiiilor funcionale, respectiv condiiiile de lansare a fazelor sunt toate diferite ntre ele, structura
algoritmului/diagramei de control este exemplificat conceptual n figura urmtoare:
Partea condiional Partea executiv
-----------Conditii Iniializare-------------------- Iniializare
-----------Conditie 1--------------------------------- Faza 1
-----------Conditie 2--------------------------------- Faza 2
-----------Conditie N-------------------------------- Faza N
2
Iniierea
procesului
Execuia
fazelor
procesului
A4 Controlul Sistemelor Industriale II
A4 - Pag 3
Fig.2.1. Structura aplicaiilor simple
Dac condiiile funcionale se suprapun atunci apare necesitatea condiionrii suplimentare a
fazelor procesului. Diagrama anterioar se modific conform Fig. 2.2.
Partea Condiional Partea Executiv
Bit Initializare (condiie)
-----------| |---------------------------------------------
|
------( S ) Step Init
|
------( R ) Step 0,1,2(N-1)
Step Init
---------- | |-------Conditie S Reset-----------------
|
------( S ) Step 0
|
------( R ) Step Init
Step 0
---------- | |-------Conditie F Reset-----------------
|
------( S ) Step N
|
------( R ) Step 0
Step N
-----------| |-------------Condiie 1------------------
|
------( S ) Step 1
|
------( R ) Step N
Step 1
-----------| |-------------Condiie 2------------------
|
------( S ) Step 2
|
------( R ) Step 1
Step 2
-----------| |-------------Condiie 3------------------
|
------( S ) Step 3
|
------( R ) Step 2
.
. Step (N-1)
-----------| |-------------Condiie N------------------
|
------( S ) Step N
|
------( R ) Step (N-1)
Step 0
-----------| |---------------------------------------------- Faza Reset
Step 1
-----------| |---------------------------------------------- Faza 1
Step 2
-----------| |---------------------------------------------- Faza 2
Step 3
-----------| |---------------------------------------------- Faza 3
.
. Step N
-----------| |---------------------------------------------- Faza N
Fig.2.2. Structura aplicaiilor dezvoltate prin MBS
E
x
e
x
u
i
a
F
a
z
e
l
o
r
P
r
o
c
e
s
u
l
u
i
C
o
m
u
t
a
r
e
a
s
e
c
v
e
n
i
a
l
a
F
a
z
e
l
o
r
P
r
o
c
e
s
u
l
u
i
I
n
i
i
a
l
i
z
a
r
e
P
r
o
c
e
s
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 4
Interpretarea diagramei
Condiiile logice corespunztoare prii Condiionale (funcii logice) sunt evaluate i n funcie de
valoarea de adevr a rezultatului operaiei logice se execut sau nu aciunile/funciile coninute de
partea executiv a diagramelor. Numai dac rezultatul operaiei logice este 1 (logic) se execut aciunea
corespunztore din partea executiv a diagramei.
Condiia Iniializare se asigur prin utilizarea biilor speciali de memorie pui la dispoziie n
majoritatea mediilor de dezvoltare a aplicaiilor Ladder.(ex: pt. PLC-urile Festo/Beck bitul FI este 1 logic
la prima scanare iar apoi devine 0 logic).
In etapa de iniializare a procesului (zona I) se execut operaii de resetare a memoriei utilizate,
se ncarc anumite constante predefinite n regitri sau uniti de memorie (iniiere temporizatoare,
numrtoare ...), se execut eventual functii de resetare a mainii/procesului n scopul readucerii
sistemului n poziia de start.
Condiie S Reset = Condiie de start a procesului de reset; Condiie F Reset= Condiie final, de
identificare a rezultatelor operaiei de reset.
Ordinea derulrii fazelor procesului este stabilit/generat prin intermediul zonei II a diagramei
,,Comutarea Secvenial Fazelor Procesului. Aceast zon (prin intermediul acestei succesiuni set, reset
a bitilor Step 1,..., Step N) asigur activarea secvenial a funciilor faza 1, faza 2,.., faza N. Coninutul
fazelor este dezvoltat n acelai limbaj (sau altul) sub forma subprogramelor, procedurilor sau funciilor.
Executarea fazelor se realizeaz n zona III prin intermediul biilor de memorie asociai Step1,
Step 2,, Step N: Condiia 1 determin lansarea/acionarea fazei 1, condiia 2 determin lansarea n
execuie a fazei 2,.., condiia N determin lansarea n execuie a fazei N.
n plus fa de elmentele structurale incluse de fig. 2, pot s existe i alte condiii
suplimentare(speciale) care s trateze anumite erori sau care s introduc anumite proceduri/moduri
speciale de funcionare a masinii (procesului). In aceast situaie trebuie resetai biii STEP 1,, STEP N,
pentru a nu intra maina/procesul n dou moduri paralele de funionare (pentru a nu aprea conflicte).
Observaii
Orice aplicaie trebuie s fie prevzut cu un buton/intreruptor de urgent (butonul
rou/EMERGENCY) care s permit decuplarea fizic a prii de for atunci cnd situaia o cere. Adic
tot ceea ce poate deteriora instalaia (motor/echipament) trebuie s poat fi oprit/decuplat prin
intermediul unui singur buton. Asta nu exclude i tratarea prin software a erorilor.
Toate condiiile i funciile/fazele incadrate ntr-un dreptunghi trebuie dezvoltate pentru fiecare
aplicaie n parte de programator:
Condiiile reprezint datele/informaia de la senzorii procesului care permit/impun trecerea la
faza urmtore din proces (pot fi comenzi sau date din process furnizate sub forma funciilor logice). O
condiie este evaluat intotdeauna ca fiind sau adevrat sau fals (0 logic sau 1 logic);
Fazele reprezint aciunile care sunt determinate de o anumit condiie n proces: poate
semnifica pornirea unui motor, lansarea unui proces de temporizare,.., lansarea unei subrutine simple
sau complexe.
A4 Controlul Sistemelor Industriale II
A4 - Pag 5
Aceast metod poate fi aplicat extrem de uor dac procesul a fost divizat iniial n faze sau
etape secveniale de funcionare care sunt lansate/activate de anumite condiii logice. Acest lucru
nseamn construirea anticipat a unor diagrame de funcionare sau altfel spus construirea programului
plecnd de la diagrama de functionare asociat procesului/mainii.
Exemplu de diagram funcional sau diagram de funcionare (ciclogram): descrie un proces
n care la apsarea butonului Start se lanseaz n micare 3 motoare liniare conform diagramei din Fig.
2.3.
M1
M2
M3
1
0
1
0
1
0
0 1 2 3 4 5 6 7=0
BStart
T1
(s11,s21,s31)
s12
s21
s22
s31 s31
s32
s32
s21
s31
s11
em11
em12
A R
1
1
0
0
A R
1
1
0
0
em21
em22
A R
0 1
em3
T2
Fig.2.3. Diagram funcional
M1, M2, M3 - motoare liniare pneumatice (cilindri);
em11,.., em3 electromagnetii de comand ai distribuitoarelor pneumatice;
A, R starea motorului (micare de avans/retragere) corespunztoare unor
comenzi pe electromagnei;
s11,.., s32 senzori magnetici pentru sesizarea poziiei pistonului motorului;
T1, T2 temporizatoare;
Bstart buton START;
Bstop buton STOP (nu e prins in diagram, oprete aplicaia).
Interpretare
La apsarea butonului START (Bstart=1) i dac senzorii s11, s21, s31 furnizeaz 1 logic (condiia
0) *adic dac toate motoarele au pistoanele retrase (operaie realizat n faza de iniiere a procesului)+
atunci motorul M1 intr n micare de avans (faza 0). Cnd M1 a atins senzorul s12, iar s21=1, s31=1
(condiia 1) atunci se declanseaz faza 1: M1 se opreste, M2 intr n micare de avans. Condiia 2
(S12=1, s22=1 i s31=1) oprete M2 i lanseaz M3 (adic faza 2).
Mai departe se detaliaz succint:
Condiia 3 (s12=1, s22=1, s32=1) determin lansarea/activarea fazei 3 (temporizare T2 pe motor
M3, [T2=1]);
Condiia 4 (terminarea procesului de temporizare *T2=0+ i s12=1, s22=1, s32=1) lanseaz faza 4
(retragerea motorului M3);
Condiia 5 (S12=1, s22=1 i s31=1) lanseaz faza 5 (lansare temporizare T1 pentruM2)
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 6
Condiia 6 (terminarea procesului de temporizare *T1=0+ i S12=1, s22=1 , s31=1) lanseaz faza
6 (retragere M1 i M2):
Condiia 7 (s11=1, s21=1, s31=1 ) e echivalent cu Conditia 0 astfel c o nou apsare a
butonului Bstart conduce la un nou ciclu funcional.
Se observ clar c ntr-o diagram funcional liniile verticale reprezint conditiile de trecere de
la o faz la alta ntr-un proces. Fazele se dezvolt prin intermediul funciilor sau subprogramelor n baza
resurselor pe care le pune la dispoziie fiecare mediu de dezvoltare.
Aceste detalieri se refer la faza de proiectare structurat a aplicaiilor LDR printr-o metod
simpl (metoda biilor secveniali) ce poate rezolva aplicaii de complexitate medie i chiar ridicat.
Acest tip de abordare presupune detalierea procesului n faze/etape i condiii sub forma diagramelor
funcionale sau o detaliere conceptual (n mintea programatorului). Aplicat strict (metodic) n acest
form se asigur rezultatele scontate fr utilizarea intens a intelectului, respectiv se asigur o form
clar de prezentare a fazelor proceselor/aplicaiilor astfel nct orice modificare sau depanare s poat
fi fcut cu usurin. Experiena conduce la simplificarea, interferena sau unificarea celor trei
componente structurale ale unei aplicaii: iniializare, comutare secvenial a fazelor, lansare faze.
Metoda Grafcet
Introducere
Denumirea prescurtat GRAFCET provine de la "Graphe de Commande Etape-Transition din
limba francez i este un mod de reprezentare i de analiz a fluxului proceselor industriale. GRAFCET
prezint mai multe avantaje n raport cu celelalte tehnici de reprezentare:
este independent de tehnologia in care se implementeaz logica (algoritmul) secvenial (cablat,
programat);
caietul de sarcini se reprezint clar i precis;
permite evoluia simultan (paralel) a mai multor secvene de stri;
permite efectuarea seleciei de secvene de stri;
un numr mare de variabile de intrare ale automatului secvential nu ridic dificulti n
reprezentarea evoluiei automatului.
n reprezentarea evoluiei proceselor, GRAFCET-uI se bazeaz pe noiunile de etap i de
tranziie. Un automat secvenial evolueaz parcurgnd o succesiune de etape, evoluia de la o etap la
alta realizndu-se printr-o tranziie care se produce atunci cnd o condiie logic asociat acesteia
(receptivitate) este indeplinit. Etapelor le corespund una sau mai multe aciuni.
Aadar, n GRAFCET, o aplicaie secvenial se reprezint cu ajutorul ,,etapelor" crora le
corespund ,,aciuni", legate ntre ele prin ,,tranziii" crora le corespund receptiviti" (Fig.
3.1).
3
A4 Controlul Sistemelor Industriale II
A4 - Pag 7
O ,,etap se reprezint printr-un ptrat numerotat i reprezint o stare particular a
automatului la un anumit moment dat al ciclului su de funcionare. Etapa care corespunde strii in care
se afl sistemul la un moment de timp t se numete etap activ. Dac se dorete indicarea faptului c
etapa este ,,activ la un moment de timp t, atunci se deseneaz un punct sub numrul din interiorul
ptratului. O stare dat a automatului secvenial poate fi constituit din mai multe etape care sunt
active simultan.
Fig.3.1
O etap iniial activ se reprezint printr-un ptrat desenat cu linie dubl. Etapa iniial activ
este etapa care se activeaz in momentul iniializrii sistemului automat. Un GRAFCET poate conine mai
multe etape iniiale.
O aciune asociat unei etape se reprezint printr-un ptrat desenat la dreapta etapei i este
legat de etapa corespunztoare printr-o linie orizontal. Fiecrei etape i se pot asocia una sau mai multe
aciuni. Este posibil ca unei etape s nu ii fie asociat nici o aciune, sau ca o aciune s fie asociat mai
multor etape.
O legtur orientat se reprezint printr-o linie vertical care leag etapele intre ele. Legturile
orientate stabilesc ordinea activrii etapelor. Sensul normal de evoluie este de sus in jos.
O tranziie dintre dou etape se reprezint printr-o bar perpendicular pe legtura orientat
corespunztoare. Legtura dintre dou etape conine numai o singur tranziie. Tranziia permite
evoluia GRAFCET dinspre etapa precedent ctre etapa urmtoare.
Receptivitatea asociat unei tranziii se scrie la dreapta barei care reprezint tranziia.
Receptivitile sunt asociate tranziiilor tot aa cum actiunile sunt asociate etapelor. Receptivitiile sunt
propoziii logice al cror rezultat nu poate fi dect adevrat sau fals. Pe lng nivelurile logice care se
ataeaz strilor stabile, mai putem avea strile tranzitorii ce reprezint trecerea de la un nivel la altul i
care se numesc eveniment.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 8
GRAFCET-uI prezentat ca exemplu in Fig. 3.2 conine numai o secven de etape in bucl inchis.
Este cel mai simplu GRAFCET i se numete GRAFCET liniar.
Fig.3.2
n continuare se vor examina situatiile mai complicate ce apar la GRAFCET, cum ar fi evoluia
secvenelor paralele i efectuarea selectiei secvenelor.
Secvene paralele
Evoluiile paralele care sunt frecvente la automatele secveniale, impun apariia in GRAFCET a
secvenelor paralele sau a secvenelor simultane (Fig. 3.3). Secventele paralele evolueaz independent
unele de celelalte pn atunci cnd toate etapele finale ale secventelor paralele devin active simultan
(ceea ce se produce de obicei dup o ateptare reciproc). Apoi evoluia GRAFCET-ului poate continua
pe o secvent unic prin declanarea simultan a unei aceleiai tranziii.
A4 Controlul Sistemelor Industriale II
A4 - Pag 9
Fig.3.3
nceputul i sfritul secvenelor paralele din GRAFCET se reprezint cu ajutorul a dou linii
paralele. Dac etapa 1 este activ i receptivitatea a devine adevrat, atunci etapele 2 i 3 vor fi
activate simultan iar etapa 1 se dezactiveaz. Atunci cnd receptivitatea b devine adevrat, etapa 4 a
secvenei din dreapta se activeaz i se dezactiveaz etapa 3 . Etapele 2 i 4 sunt active simultan dup o
ateptare de ctre etapa 2 a activrii etapei 4. La momentul cnd receptivitatea c devine adevirat etapa
5 se activeaz i se dezactiveaz etapele 2 i 4.
Observaie
Mai multe secvene paralele incep i se termin totdeauna cu o receptivitate unic.
Receptivitatea unic care finalizeaz secvenele paralele poate fi intetpretat ca fiind produsul logic al
receptivitilor individuale de la sfiritul secvenelor paralele.
Selectarea secvenelor
Atunci cnd evoluia ntr-un GRAFCET, pornind de la o etap, poate fi efectuat alegnd intre
mai multe secvene care debuteaz prin tranziii ale cror receptiviti sunt exclusive, se spune c avem
de-a face cu o selectare a secvenelor.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 10
Fig.3.4 Fig.3.5
Spre exemplu (Fig. 3.4), atunci cnd etapa 1 este activ, GRAFCET-uI va evolua pe secvena din
partea stng a GRAFCET-ului dac receptivitatea a este indeplinit (etapele 2I, 22, etc.), va evolua pe
secvena din centru dac receptivitatea b este indeplinit sau pe cea din dreapta, daca este indeplinita
receptivitatea c. De asemenea este posibil o selectare a secvenelor prin care va evolua un grafcet
pornind din mai multe etape. n grafcet-ul prezentat ca exemplu in Fig. 3.5 dac etapele 1 i 2 devin
active simultan sistemul va evolua prin etapa 3 dac a este adevlrat sau va evolua prin etapa 4 dac b
este adevrat.
Pentru ca mai multe secvene dintr-un GRAFCET s aib asigurat exclusivitatea evoluiilor este
necesar s ne asigurm c toate receptivitiile asociate tranziiilor prin care debuteaz secvenele nu
pot fi indeplinite in acelai timp. Caracterul exclusiv al evoluiei secvenelor se poate obine pe dou ci:
datorit incompatibilitii fizice a diferitelor elemente componente ale sistemului automat existente in
timpul evoluiei (contacte separate, parametri diferii, etc.) care nu pot indeplini tranziiile simultan sau
datorit unei incompatibiliti logice obinute prin modul de scriere a expresiilor receptivitilor.
Exemplu
dac a=0, b=0, nici o tranziie nu este declanat;
dac a=1, b=0 atunci sistemul evolueaz in etapa 2 care se activeaz i se dezactiveaz etapa 1 ;
dac a=0, b=1, atunci sistemul evolueaz in etapa 3 care se activeaz i se dezactiveaz etapa 1
;
dac a=1, b=1 sistemul evolueaz in etapa 2 care se activeaz i se dezactiveaz etapa 1 .
Se constat c etapa 2 devine prioritar in evolutia GRAFCET-ului in cazul in care cele dou
variabile logice a i b devin 1 logic simultan. Selectarea secvenelor prezint dou cazuri particulare care
apar frecvent in descrierea evoluiei sistemelor logice secveniale:
Saltul peste etape permite neefectuarea unui anumit numr de etape dintr-o secven. n
exemplul prezentat in Fig. 3.7, sistemul secvenial evolueaz din etapa 1 direct in etapa 4 dac
receptivitatea a b este indeplinit (a b=1) i evolueaz normal din etapa 1 ctre etapa 2 dac
a=0, b=1 (a b=0, Na b = 1).
A4 Controlul Sistemelor Industriale II
A4 - Pag 11
Reluarea ciclic a etapelor permite parcurgerea de mai multe ori a aceluiai ciclu de etape in
scopul ateptrii indeplinirii unei condiii logice. n exemplul prezentat n Fig. 3.8, pornind din
etapa 3 sistemul va parcurge repetat secvena etapelor 2 Si 3, dac Na b =1. n momentul in care
condiia ab va fi ndeplinit adic ab=1, se va activa etapa 4 i reluarea ciclic a etapelor 2 i 3
inceteaz.
Fig.3.6 Fig.3.7
Reuniunea mai multor secvene de etape care pot apare in structura unui GRAFCET se va descrie
astfel inct fiecare secven se finalizeaz cu propria sa receptivitate. n exemplul prezentat in Fig. 3.9
sistemul va permite activarea etapei 5 dac: etapa 3 fiind activ, receptivitatea c devine adevrat sau
etapa 4 fiind activ, receptivitatea d devine adevrat.
Fig.3.8 Fig.3.9
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 12
Reguli de evoluie
Constituirea corect a unui GRAFCET impune aplicarea unor reguli fundamentale care se
prezint n continuare.
Regul de sintax: alternana etap-tranziie
Alternana etapelor i tranziiilor trebuie s fie respectat n orice secven din oricare GRAFCET;
dou etape nu se vor lega niciodat direct una dup cealalt i, de asemenea, dou tranziii nu vor urma
niciodat una dup cealalt fr ca ntre ele s existe cel puin o etap.
Reguli de evoluie
Regula 1. Situaia iniial
O situaie iniial se caracterizeaz prin aceea c la demararea funcionrii automate (la
iniializare) un anumit numr de etape sunt active. Etapa sau etapele iniial active se reprezint cu
ajutorul unui ptrat cu chenar dublu. Ieirile asociate acestor stri reprezint aciunile iniiale ale
sistemului automat.
Regula 2. Declanarea unei tranziii.
Tranziia dintre etape este validat atunci cnd toate etapele de intrare (precedente din
amonte) sunt active. Tranziia va fi declanat (se va produce) dac este validat i dac receptivitatea
asociat tranziiei are valoarea 1 logic (este adevrat). Declanarea tranziiei devine imediat i
obligatorie.
Regula 3. Evoluiile etapelor active.
Declanarea unei tranziii conduce la activarea tuturor etapelor imediat urmtoare i la
dezactivarea tuturor etapelor precedente.
Exemplu de aplicare a regulilor 2 i 3
n Fig. 3.10 tranziia este nevalidat (etapa2 este inactiv).
n Fig. 3.11 tranziia este validat (etapele1 i 2 sunt active).
Fig.3.10
A4 Controlul Sistemelor Industriale II
A4 - Pag 13
Fig.3.11
Fig.3.12 Fig.3.13
n Fig.3.12 tranziia este declanabil, etapele 1 i 2 sunt active i receptivitatea ataat tranziiei
este adevrat. n Fig. 3.13 tranziia este declanat (etapa 3 a devenit activ i etapele 1 i 2 au devenit
inactive).
Regula 4. Evoluii simultane
Mai multe tranziii declanabile simultan vor fi declanate simultan. Aceast regul este util
mai ales in situaiile cnd se dorete descompunerea unui GRAFCET in mai multe sub-GRAFCET-uri
independente.
Aciuni particulare
n cadrul analizei aciunilor asociate unei etape se face distincia dintre durata ct este activ o
etap i durata ct este activ aciunea asociat etapei respective. Se folosete notaia Xi pentru etapa
din GRAFCET care reprezint starea i, conform exemplului urmtor: X3 = 1 dac etapa 3 este activ i
3
=1 sau X3 = 0 dac etapa 3 este inactiv.
Aciune continu
Aciunea particular cea mai simpl este aciunea continu care se produce att timp ct etapa
creia i este asociat rmne activ. Spre exemplu (Fig. 3.14), aciunea asociat etapei 3 se produce
exact att timp ct etapa 3 este activ.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 14
Fig.3.14
Dac o aciune trebuie s se menin pe durata mai multor etape, atuncl aciunea trebuie
repetat in GRAFCET pentru toate aceste etape. Spre exemplu (Fig. 3.15), aciunea A se menine pe
toat durata ct etapele 3 i 4 sunt active.
Fig. 3.15
Aciune condiionat
O aciune condiionat este o aciune continu a crei execuie depinde de indeplinirea unei
condiii logice U. Condiia se noteaz in GRAFCET cu ajutorul unei linii groase verticale, desenat in
partea superioare a ptratului care reprezint aciunea. n exemplul din Fig. 3.16 aciunea B se execut
pe durata ct etapa 2 este activ, dar numai att timp ct condiia U este realizat:
aciunea B = X2 U
Fig.3.16
Aciunile condiionate sunt utilizate de regul pentru a impune condiii de securitate in
funcionarea sistemelor de conducere automat. Spre exemplu, un ascensor urc sau coboar numai
dac uile sunt inchise.
A4 Controlul Sistemelor Industriale II
A4 - Pag 15
Aciune temporizat
Aciunea temporizat este o aciune condiionat la care condiia logic este reprezentat de
variabila timp. Notaia utilizat n GRAFCET este t/i/q sec.,unde t este timpul, i este numrul etapei in
care se declaneaz temporizarea i q reprezint durata temporizrii in secunde. n exemplul din Fig.
3.17, etapei 3 din GRAFCET i sunt asociate dou aciuni temporizate A i B. Aciunea A se execut dup
expirarea timpului de 2 secunde de la activarea etapei 1, pe durata ct etapa 3 este activ. Aciunea B se
execut dac nu a expirat timpul de 5 secunde de la activarea etapei 1, pe durata ct etapa 3 este activ.
Fig.3.17
Aciunea de declanare a unei temporizri
Printre aciunile asociate unei etape din GRAFCET se numr i aciunea de declanare a unei
temporizri care se reprezint cu ajutorul notaiei T = q sec. in interiorul ptratului care este rezevat
acestei aciuni (Fig. 3.18).
Fig.3.18
Receptiviti particulare
Receptivitatea a sociat unei tranziii poate lua forme particulare care sunt intlnite frecvent in
alctuirea unui GRAFCET: receptivitatea funcie de timp i receptivitatea care acioneaz n impuls.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 16
Receptivitatea funcie de timp
Recepivitatea asociat unei tranziii poate consta in supravegherea consumrii unei temporizri
care a fost activat de o anumit etap a GRAFCET. Notaia utilzat este t/i/q sec., care a fost prezentat
la aciune temporizat.
Fig.3.19
n exemplul din Fig. 3.19 etapei 3 se asociaz dou aciuni care constau in declanarea
temporizrilor T= 8 sec. i T= 16 sec. Receptivitatea asociat tranziiei (6) va fi validat la 8 secunde dup
activarea etapei 3 i receptivitatea asociat tranziiei (7) va fi validat la 16 secunde dup activarea
aceleiai etape 3.
Receptivitatea care acioneaz n impuls
n funcionarea unui sistem de conducere automat apar situaii in care este necesar
detectarea frontului ridictor sau frontului cobortor al impulsului unei variabile logice. Spre exemplu,
variabila poate fi generat de un limitator capt de curs sau poate reprezenta bitul scris intr-un registru
de stare. Cu ajutorul notaliei <a> se reprezint trecerea unei variabile a din starea logic a=0 in starea
logic a = 1 (front ridictor) i, cu notaia < a >, se reprezint trecerea unei variabile a din starea logic
a=1 in starea logic a=0 (front cobortor). Receptivitatea asociat unei tranziii poate fi constituit din
frontal ridictor sau din frontul cobortor al impulsului unei variabile logice. n exemplul din Fig. 3.20,
etapa 6 se va activa numai dup producerea frontului ridictor al variabilei a i etapa 7 se va activa dup
producerea frontului cobortor al variabilei b .
Fig.3.20
A4 Controlul Sistemelor Industriale II
A4 - Pag 17
Detectarea apariiei frontului ridictor al unei variabile logice a se face verificnd mai nti c
variabila este absent (a = 0) i apoi verificnd c variabila devine prezent (a = 1). Cele dou secvee din
Fig. 3.21 sunt echivalente. Tranziia intre etapele 2 i 3 controleaz absena variabilei a prin
receptivitatea i tranziia dintre etapele 3 i 4 controleaz prezena variabilei a prin receptivitatea a.
Fig.3.21
Sincronizarea i cuplarea secvenelor
n aplicaii apare adesea necesitatea ca derularea unei secvene de condiii logice s depind de
derularea unei alte secvene. Cele dou secvene vor trebui sincronizate i acest lucru se poate obine
prin: conceperea judicioas a structurii GRAFCET-ului care descrie evoluia automat; intervenia in
receptivitile unei secvene din GRAFCET a strilor active ale altei secvene din grafcet.
n continuare se prezint cteva exemple referitoare la simultaneitatea, ateptarea sau
interdicia evenimentelor care pot apare in automatizri.
Simultaneitatea evenimenetelor
S presupunem c pentru dou secvene S1 i S2 ale aceluiai GRAFCET se dorete asigurarea
activrii simultane a dou etape, 5 i 8 spre exemplu, conform Fig. 3.22 stnga. Rezultatul dorit se poate
obine fcnd s intervin in receptivitatea tranziei (1) starea activ X7 a etapei 7 i in receptivitatea
tranziiei (2) starea activ X4 a etapei 4. Un rezultat echivalent poate fi obinut folosind structura
GRAFCET din Fig. 3.22 dreapta, unde tranziia (3) se valideaz direct cu ajutorul celor dou etape 4 i 7.
Fig.3.22
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 18
Ateptarea evenimentelor
Dac se dorete ca o secven S2 s fie executat numai dup executarea unei alte secvene S1,
atunci se poate opta pentru o structur cum este cea din Fig. 3.23.a. Independent de condiiile care i
sunt proprii (reprezentate aici prin etapa 5), secventa S2 va fi autorizat s porneasc numai dup ce
etapa 4 (care depinde de execuia secvenei S1) va fi activat.
a) b)
Fig.3.23
Blocarea producerii evenimentelor
n cazul cnd anumite aciuni ale unei secvene S1 sunt interzise a se produce dac alte aciuni
ale unei secvene S2 au loc, se poate face astfel inct declanarea tranziiilor secvenei S1 s depind de
strile active corespunztoare secvenei S2. Spre exemplu (Fig.3.23.b), receptivitateoa a
7
asociat
tranziiei (1) din secvena S1 blocheaz producerea aciunii A atunci cnd aciunile B i C au loc.
Conversia GRAFCETLDR
n reprezentrile GRAFCET una din caracteristicile importante este aceea c ntr-o aplicaie, la un
moment dat, este activ doar una sau mai multe etape funcionale (stri), i nicidecum toate etapele.
Acest detaliu aduce simplificri importante n modul de concepere a aplicaiilor, n sensul c
programatorul se poate concentra doar asupra detaliilor etapelor active, fr a mai fi nevoit s se
raporteze n permanen la toate etapele procesului. Adic, dac programarea PLC-urilor, n modul
intrinsec, este proprie proceselor paralele (datorit procesrii ciclice i imaginii de proces), prin diverse
tehnici, programarea poate fi transformat n una secvenial, pe etape/pai succesivi. Aceste tehnici de
transformare a abordrii paralele n una serial (secvenial) urmresc prin diverse strategii activarea la
un moment dat doar a strilor (etapelor) dorite. Una din tehnicile care permit activarea, la un moment
dat, doar a etapelor dorite este inspirat din acionarea circuitelor cu relee. Astfel o etap poate fi
activat i automeninut la fel ca i bobina unui releu. Dac se includ n acest logic i regulile de
evoluie GRAFCET (vezi Curs 6) atunci etapele/strile procesului vor fi activate n baza unor ecuatii logice
ntre biii de stare asociai etapelor i tranziiilor (receptivitiilor).
n continuarea se detaliaz ecuaiile logice de activare a strilor/etapelor, corespunztoare
diverselor situaii elementare.
A4 Controlul Sistemelor Industriale II
A4 - Pag 19
Fig.3.24. Diagram GRAFCET.
Succesiune simpl de stri.
Succesiunea simpl
Activarea/dezactivarea unei stri ntr-o
diagram Grafcet este guvernat, pentru o
succesiune oarecare de stri (figura 5.23), de
urmtoarea ecuaie:
(*) S
i
= S
i-1
*T
i
+S
i
*
i+1
unde, condiia de activare este S
i-1
*T
i
,
respectiv, condiia de automeninere: S
i
*
i+1
Condiia de activare: starea (S
i
) se
activeaz dac condiia de activare este realizat,
adic dac sunt active starea precedent (S
i-1
) i
condiia de tranziie (Ti).
Condiia de automeninere: Starea (S
i
) se
automenine dac nu este activ starea urmtoare
(S
i+1
). n consecint, n baza ecuaiei logice, cnd
starea urmtoare (S
i+1
) se va activa, starea curent
(S
i
) se va dezactiva ntotdeauna.
Transpunerea n Ladder a ecuaie Grafcet (*): Fig. 3.25.
Fig. 3.25. Diagrama LDR asociat ecuaiei logice (*). Starea S
i
va fi activ att timp ct funcia logic
asociat prii condiionale a diagramei va avea valoarea 1 logic.
Divergena SAU
Procesele secveniale includ i ramificaii mai complexe de tipul divergenelor SAU: atunci cnd
procesul aflat ntr-o stare S
i
, poate evolua ntr-o stare S
j
sau S
k
, dup cum este activ condiia T
j
sau T
k
.
Pentru a evita situaia n care strile S
j
i S
k
ar putea fi activate simultan, ecuaiile Grafcet trebuie
completate cu o condiie de excludere reciproc pentru cele dou condiii de tranziie: condiia T
j
va fi
validat numai dac nu este realizat condiia T
k
, iar condiia T
k
va fi validat doar dac nu este realizat
condiia T
j.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 20
Ecuaiile GRAFCET:
S
i
= S
i-1
*T
i
+ S
i
*
j
*
k
S
j
= S
i
*T
j
*
k
+ S
i
*
j+1
S
k
= S
i
*T
k
*
j
+ S
k
*
k+1
Transpunerea n Ladder a ecuaiilor Grafcet : Fig. 3.27
Fig.3.27. Diagrama LDR asociat ecuaiilor logice: divergena SAU.
Fig.3.26. Divergena SAU
A4 Controlul Sistemelor Industriale II
A4 - Pag 21
Divergena SI
Divergena SI implic evoluia procesului din starea curent S
i
, simultan n strile S
j
i S
k
(dou
sau mai multe). Starea S
i
se va menine pn se vor activa simultan strile S
j
i S
k.
Activa celor din urm
conduce obligatoriu la dezactivarea celei precedente S
i.
Ecuaiile GRAFCET:
S
i
= S
i-1
*T
i
+ S
i
*
j
+ S
i
*
k
S
j
= S
i
*T
i+1
+ S
j
*
j+1
S
k
= S
i
*T
i+1
+ S
k
*
k+1
Transpunerea n Ladder a ecuaiilor Grafcet: Fig. 3.29
Fig.3.29. Diagrama LDR asociat ecuaiilor logice: divergena I
Fig.3.28. Divergena I
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A4 - Pag 22
Convergena SAU
Procesul poate trece n starea S
i
din oricare din strile S
j
sau S
k
prin activarea condiiei
corespunztoare strii active, T
k+1
pentru starea S
k
sau T
j+1
pentru starea S
j
.
Ecuaia GRAFCET:
S
i
= S
j
*T
j+1
+ S
k
*T
k+1
+ S
i
*
i+1
S
j
= S
j-1
*T
j
+ S
j
*
i
S
k
= S
k-1
*T
k
+ S
k
*
i
Convergena I
Procesul poate trece n starea S
i
cu condiia ca strile S
j
, S
k
i condiiile T
j+1
, T
k+1
s fie satisfcute
simultan. Activarea strii S
i
, conduce la dezactivarea strilor anterioare.
Ecuaiile GRAFCET:
S
i
= S
j
*T
j+1
*S
k
*T
k+1
+ S
i
*
i+1
S
j
= S
j-1
*T
j
+ S
j
*
i
S
k
= S
k-1
*T
k
+ S
k
*
i
Fig.3.30. Convergena SAU
Fig.3.31. Convergena I
A5 - Pag 1
Tehnologii Industriale
1. Tehnologia Siemens. Generaliti
2. Mediul de dezvoltare STEP7
3. Proiectarea unui sistem de control secvenial
Tehnologia Siemens. Generaliti
SIEMENS este un concern cu un bogat portofoliu de produse i servicii n urmtoarele domenii:
tehnologia informaiei i comunicaii, tehnic medical, energie, transporturi, automatizri i
acionri.
Criteriul hotrtor n alegerea soluiilor SIEMENS n conducerea proceselor automate este stabilitatea
i robusteea sistemelor, fr ns a neglija aspecte precum: uurina n operare, monitorizarea i
nregistrarea erorilor, diagnosticarea eventualelor defecte precum i un service rapid. Proiectarea unui
sistem de automatizare implic alegerea de componente fizice i logice consacrate n mediul industrial, i
configurarea lor conform cerinelor aplicaiei vizate.
Soluiile software i hardware furnizate de SIEMENS asigur urmtoarele:
Achiziioneaz i monitorizeaz permanent starea parametrilor procesului pentru a furniza
repede i sigur informaiile ce stau la baza lurii deciziilor.
Minimizeaz costurile de producie optimiznd consumurile energetice i de materie prima.
Asigur uurina n exploatarea echipamentelor de monitorizare i control prin proiectarea
unor interfee de operare prietenoase i flexibile n conformitate cu cerinele clientului.
1. Sistemul de automatizare SIMATIC S7
Sistemul de automatizare SIMATIC este reprezentat de componente modulare care sunt astfel
proiectate nct s poat fi utilizate metode unitare de configurare, nregistrare i transmitere a datelor.
PLC-urile din familia SIMATIC (S7) reprezint baza sistemului de automatizare. Cele 3 tipuri aflate
pe pia sunt:
A5
1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 2
S7-200 un automat de mici dimensiuni folosit n automatizarea unor procese de complexitate
redus;
S7-300 este un automat pentru automatizri de complexitate medie;
S7-400 reprezint soluia pentru automatizri complexe.
Celelalte componente din soluia SIMATIC pentru automatizri (module auxiliare) extind
funcionalitatea unitii centrale, rezultnd o consol dedicat aplicaiei avute n vedere.
Limbajul acestui concept de automatizare este STEP 7, care este utilizat pentru configurarea
componentelor SIMATIC, atribuirea de parametri i, nu n ultimul rnd, programarea automatelor.
Unealta software central este reprezentat de SIMATIC Manager care pstreaz toate datele unui
proiect de automatizare ntr-un director cu o structur ierarhizat.
Principalele activiti realizate de STEP 7 sunt:
configurarea hardware-ului ceea ce reprezint aranjarea modulelor, atribuirea de adrese,
precum i setarea proprietilor acestora;
configurarea parametrilor de comunicare precum i a proprietilor acesteia;
scrierea de programe utilizator pentru PLC ntr-unul dintre cele 4 limbaje: Ladder Diagram (LAD),
Function Block Diagram (FBD), Statement List (STL) sau S7-GRAPH, precum i testarea online a
acestora pe automat.
2.1. Uniti Centrale SIMATIC
La ora actual se folosesc 3 familii de uniti centrale de procesare (CPU) pentru automatizri
SIMATIC:
2.1.1. Familia S7-200:
limbaj de programare STEP 7 Micro;
folosit pentru automatizri de complexitate redus;
extinderea funcionalitii cu ajutorul modulelor dedicate;
exist posibilitatea conectrii mai multor uniti centrale mpreun (pn la 31);
exist posibilitatea conectrii cu alte automate din familia SIMATIC.
Figura 2.1. Exemplu de CPU din familia S7-200
A5 Tehnologii Industriale
A5 - Pag 3
2.1.2. Familia S7-300:
automatizri de complexitate medie;
aceleai caracteristici ca la S7-200 i n plus posibilitate de instalare a unei surse suplimentare pe
ina central;
prevzut cu module pentru operare n condiii ostile (temperaturi foarte ridicate sau sczute, un
nivel ridicat de vibraii, rezisten la ocuri).
Sloturile sunt numerotate:
1- pentru surs (chiar dac lipsete),
2- pentru unitatea central,
3- modul de comunicare,
4- module de I/O (pn la slotul 11 inclusiv).
2.1.3. Familia S7-400:
se preteaz proceselor complexe supuse automatizrii;
mbuntete performanele staiilor din familia 300, dnd o mai mare capacitate de procesare
a informaiei;
posibilitatea de conectare a dou uniti centrale la aceeai surs;
Figura 2.2. Exemplu de CPU din familia S7-300
Figura 2.3. Exemplu de CPU din familia S7-400
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 4
capacitate de multiprocesare.
Componentele din gama SIMATIC S7-300/400 permit anexarea unui sistem redundant de
automatizare, astfel c o staie poate prelua controlul procesului n cazul n care staia master
funcioneaz defectuos. n timpul acestei perioade, toate semnalele din proces sunt ngheate.
Pe lng ina de montare, unitatea central de procesare i modulele de I/O, un sistem complet
S7 presupune i prezena unui panou operator prin intermediul cruia factorul uman poate interaciona
cu sistemul de automatizare.
2.2. Configuraia hardware a sistemului de automatizare S7-300
PS (Power Supply) Surs suplimentar de tensiune
CPU (Central Processing Unit) Unitatea principal de comand (PLC)
IM (Interface Module) Modulul de interfaare asigur conectarea automatului industrial la
magistrala de date
SM (Signal Modules)
o DI (Digital Inputs Modules) Module de intrri digitale: 24VDC sau 120/230VAC
o DO (Digital Outputs Modules) Module de ieiri digitale: relee 24VDC
o AI (Analog Inputs Modules) Module de intrri analogice: intrri n tensiune, curent,
rezisten variabil sau termocuplu
o AO (Analog Outputs Modules) Module de ieiri analogice: surse de tensiune/curent
FM (Function Modules) Module cu funcii speciale
CP (Communication Processors) Module pentru interfaarea sistemului de automatizare prin
intermediul diferitelor standarde de comunicaie
(Opional)
-Numrtoare
-Sisteme de
poziionare
-Controler n
bucl nchis
(Opional)
-Point-to-Point
-PROFIBUS
-Ethernet
Industrial
S7-300
Figura 2.4. Modulele sistemului S7-300
A5 Tehnologii Industriale
A5 - Pag 5
Atenie! Ordinea de amplasare a modulelor pe ina de montare prezentat n figura de mai inainte este
obligatorie i este utilizat i n configurarea hardware din cadrul proiectelor
Mediul de dezvoltare STEP 7
Pentru lansarea n execuia a mediului de dezvoltare STEP 7 (SIMATIC Manager) se alege una din
urmtoarele 2 variante:
Lansai aplicaia direct de pe Desktop prin intermediul icoanei:
Urmai calea:
Start All Programs Siemens Automation SIMATIC SIMATIC Manager
2
Figura 2.5. Pictograma SIMATIC Manager
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 6
2.3. Setarea interfeei PG/PC
Dup lansarea n execuie a aplicaiei se deschide o fereastr precum cea din figura de mai jos.
Figura 2.6. Calea ctre SIMATIC Manager
A5 Tehnologii Industriale
A5 - Pag 7
n aceast faz, se va apsa butonul Cancel.
Din meniul Options se alege Set PC/PG Interface...
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 8
Se alege butonul Select...
Se alege PC Adapter dup care se apas butonul Install
A5 Tehnologii Industriale
A5 - Pag 9
Dup confirmarea instalrii se alege Close.
Se deruleaz n list i se alege PC Adapter (MPI) dup care se apas butonul Properties...
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 10
Figura 2.7. Adaptorul PC pentru programarea automatelor Siemens
Se alege viteza de comunicaie n concordant cu viteza selectat pe adaptorul PC dup care se
d click pe butonul OK.
A5 Tehnologii Industriale
A5 - Pag 11
Configurarea se ncheie prin apasarea butonului OK, dup care se nchide i fereastra SIMATIC
Manager.
2.4. Crearea unui proiect nou
Lansai aplicaia SIMATIC Manager.
Apsai butonul Next.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 12
Figura 2.8. Exemplu de automate din gama S7-300
Selectai din list tipul automatului (indicativul ce apare n colul stnga sus al unitii centrale
de calcul), dup care apsai Next.
A5 Tehnologii Industriale
A5 - Pag 13
Se bifeaz LAD (simboliznd alegerea limbajului de programare prin diagrame Ladder pentru
funcia ciclic OB1), urmat de apsarea butonului Next.
Se introduce numele proiectului i se finalizeaz configurarea proiectului apsnd butonul
Finish.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 14
2.5. Configurarea hardware a proiectelor SIMATIC Manager
Alegerea unitii centrale furnizeaz doar informaii generale despre proiectul avut n vedere i,
ca atare, este necesar o explicitare complet a soluiei de automatizare.
Pentru aceasta:
Din meniul SIMATIC 300 Station se deschide editorul pentru componena hardware a proiectului
(cu dublu click).
Figura 2.9. Simbolizarea seriei i a versiunii pe automatele S7-300
A5 Tehnologii Industriale
A5 - Pag 15
Se selecteaz unitatea central i se compar seria i versiunea cu cele reale.
Dac aceast configurare automat nu corespunde, se trece la configurarea manual a
modulelor:
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 16
o Se selecteaz unitatea central i se apas tasta Delete de la tastatur, dup care se confirm
apasnd butonul Yes.
o La urmtoarea atenionare se rspunde No, pentru a nu pierde eventualele programe
implementate anterior.
A5 Tehnologii Industriale
A5 - Pag 17
o Unitatea central utilizat la elaborarea prezentului proiect pentru suport de curs este CPU
313C, model 313-5BF03-0AB0, versiunea de firmware v2.0. Dup identificarea ei n lista
unitilor SIMATIC 300 disponibile, se marcheaz i se execut dublu-click. Observaie: se poate
vedea c a fost introdus pe poziia 2 a inei de montare virtual, locul fiind conform cu poziia
din figura 4 (subcapitolul Configuraia hardware a sistemului de automatizare S7-300).
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 18
o La efectuarea unui click dreapta la nivelul intrrilor/ieirilor digitale, apare meniul din figura de
mai sus, unde se selecteaz Object Properties ...
A5 Tehnologii Industriale
A5 - Pag 19
o SIMATIC Manager va deschide fereastra din figura de mai sus. Selectai eticheta Addresses din
partea de sus a ferestrei. System default este bifat implicit. O zon de memorie de 2 Bytes este
alocat intrrilor ncepnd cu adresa 124 pna la 126, iar pentru ieiri o zon de 1 Bytes
ncepnd cu adresa 124 pn la 125.
o Se recomand ca acestea s fie definite de utilizator, mai ales n cazul aplicaiilor mai complexe
cnd se adaug module suplimentare.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 20
o Pentru a modifca aceste setri implicite debifai System default i introducei adresa de start 0
(zero) att la intrri ct i la ieiri. Se confirm modificrile efectuate cu butonul OK
A5 Tehnologii Industriale
A5 - Pag 21
o Pe urmtoarele poziii se pot introduce eventuale module specifice configuraiei hardware
alegndu-le dup seriile unice de identificare (n ordinea prezentat n subcapitolul
Configuraia hardware a sistemului de automatizare S7-300).
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 22
o La final, se salveaz configuraia implementat efectund un click pe pictograma Save, dup
care se nchide editorul.
2.6. Lista de simboluri
Intrrile, ieirile, temporizatoarele, numrtoarele i/sau funciile bloc utilizate n construirea
aplicaiilor pot fi apelate utiliznd adresele lor absolute sau li se pot asocia denumiri simbolice, mai
sugestive.
2.6.1. Adresarea absolut
Adresarea absolut presupune accesarea resurselor direct prin adresa lor (cum ar fi I 0.0 pentru
intrri sau Q 0.0 pentru ieiri). n acest caz, nu este necesar definirea unei liste de simboluri, dar
programul este greu de citit.
n figura ce urmeaz se poate vedea un exemplu de programare ce utilizeaz adresarea
absolut.
2.6.2. Adresarea simbolic
Adresarea simbolic permite utilizarea unor denumiri sugestive pentru resursele sistemului de
automatizare. Un exemplu de programare simbolic se poate observa n figura urmtoare.
I 0.0
Q 0.0
A5 Tehnologii Industriale
A5 - Pag 23
Legtura ntre adresa absolut i simbolul asociat se face prin intermediul listei de simboluri.
Definirea elementelor acesteia se face dup cum urmeaz:
Din meniul S7 Program se deschide editorul listei de simboluri executnd dublu click pe icoana
Symbols.
Lungimea denumirii simbolurilor este limitat la 24 de caractere, iar observaiile introduse n
cmpul Comments pot fi iruri de maxim 80 caractere.
Cmpul Address se completeaz cu adresa absolut (exemple: M 0.0, M 0.1 bii de memorie;
MB 1, MB 2 octei de memorie; MW 10, MW 12 cuvinte de memorie; I 0.0, I 1.0 intrri; Q 0.0, Q 1.0
ieiri; T 1, T2 temporizatoare; C 1, C 2 numrtoare .a.) a resursei vizate, iar cmpul Data type va
reine tipul datei (este completat automat de mediul de dezvoltare).
Cmpul Status va conine unul din nsemnele urmtoare numai dac:
o X definirea simbolului este incomplet sau
o = denumirea simbolului sau adresa absolut asociat acestuia se regsesc i n definirea
altor simboluri.
B_Start
L_LampaQ1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 24
Pentru exemplificare adugm simbolul B_Start cu adresa absolut I 1.0 ce corespunde intrrii
digitale la care este conectat butonul Start de pe panoul de comand.
Se introduce i simbolul unei ieiri (lampa Q1) pentru configurarea unei aplicaii demonstrative.
Se salveaz lista de simboluri dnd click pe pictograma Save, dup care se nchide editorul.
Se poate reveni ori de cte ori este nevoie pentru modificarea sau completarea listei de
simboluri urmnd paii indicai anterior.
A5 Tehnologii Industriale
A5 - Pag 25
2.7. Programarea unei aplicaii
Din meniul Blocks se deschide (cu dublu click) blocul OB1 (programul cu execuie ciclic).
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 26
Dup deschiderea editorului se verific n meniul View dac limbajul de programare selectat
este Ladder Diagram (LAD). n caz contrar, acesta se valideaz cu un click.
A5 Tehnologii Industriale
A5 - Pag 27
n acest moment mediul este pregtit pentru implementarea programului aplicaiei vizate. Implicit
exist o singur ramur principal pe care se vor introduce elemente decizionale i de execuie.
Componenta decizional poate include i funcii bloc dedicate unor operaii logice predefinite, dar i
blocuri ale cror funcionalitate este definit de utilizator.
Introducem un contact normal deschis prin intermediul pictogramei aferente dup care se d
click pe notaia ??.? pentru a introduce denumirea intrrii asociate. Se poate folosi att
adresarea absolut ct i cea simbolic.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 28
Dup introducerea primelor caractere, mediul de dezvoltare sugereaz simboluri din lista celor
predefinite de utilizator.
A5 Tehnologii Industriale
A5 - Pag 29
Dup selectarea zonei ramurii unde se dorete introducerea unui nou element decizional i/sau
de execuie, se introduce o bobin de execuie prin intermediul pictogramei aferente.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 30
Se asociaz elementului de execuie introdus anterior cu ieirea L_LampQ1.
A5 Tehnologii Industriale
A5 - Pag 31
Prima aplicaie prin care Lampa Q1 este aprins ct timp butonul Start este apsat poate fi
salvat i ncrcat n memoria automatului programabil. Acestea se realizeaz prin selectarea
pictogramelor aferente.
n cazul n care n memoria automatului exist o aplicai anterioar, aceasta se va rescrie cu cea
nou prin confirmare cu butonul Yes.
Dup ce mediul de dezvoltare confirm incheierea procesului, funcionarea aplicaiei poate fi
testat pe stand.
2.8. Forarea intrrilor/ieirilor
SIMATIC Manager permite utilizatorului s foreze intrrile i ieirile automatului avnd ca scop
urmatoarele:
diferenierea dintre erorile de tip software i hardware ;
monitorizarea variabilelor alocate n lista de simboluri;
depanarea programelor;
Exist dou metode prin care se poate realiza acest lucru i vor fi exemplificate n cele ce
urmeaz.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 32
2.8.1. Forarea intrrilor/ieirilor utiliznd HW Config
Fereastra HW Config (configurare hardware) se deschide dnd dublu ckick pe icoana Hardware.
A5 Tehnologii Industriale
A5 - Pag 33
Pentru accesarea ferestri de forare a unui modul de intrri/ieiri, se d click dreapta i din
meniul pe modulul dorit i se selecteaz din meniul contextual Monitor/Modify.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 34
Apare fereastra de forare a intrrilor/ieirilor modulului . n fereastr vei regsii adresele
alocate i denumirea intrrii/ieirii conform listei de simboluri. Pentru trecerea SIMATIC
Manager n modul online, bifai csua Monitor.
A5 Tehnologii Industriale
A5 - Pag 35
SIMATIC Manager va afia mesajul RUNNING i va trece n modul online afind continuu starea
logic a intrrilor i ieirilor:
o 1 logic este simbolizat printr-un ptrel gri cu un dreptunghi verde n interior;
o 0 logic este simbolizat printr-un ptrel gri.
Coloana Status value va afia starea curent a ieirii, iar prin modificarea coloanei Modify value
se poate fora starea unei ieiri. Pentru aceasta, se introduce starea logic dorit n cmpul
Modify value i se apas butonul cu acelai nume.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 36
2.8.2. Forarea intrrilor/ieirilor utiliznd obiectul Variable Table (VAT)
Se insereaz n cadrul proiectului un bloc de tip Variable Table.
Cu dublu-click se deschide blocul VAT_1.
A5 Tehnologii Industriale
A5 - Pag 37
Selectai prima linie i alegei Insert Range of Variables...
Putei alege s introducei o singur variabil sau un interval (prima adres i numrul de bii).
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 38
Pentru a monitoriza variabilele, automatul trebuie trecut n modul online, iar acest lucru este
relizat prin intermediul butonului Monitor Variables.
Coloana Status value va afia starea curent a ieirii, iar prin modificarea coloanei Modify value
se poate fora starea unei ieiri. Pentru aceasta, se introduce starea logic dorit n cmpul
Modify value i se apas pictograma cu acelai nume.
A5 Tehnologii Industriale
A5 - Pag 39
Proiectarea unui sistem de control secvenial
2.9. Cerina
Se dorete programarea unui sistem secvenial de sortare automat.
4.2. Standul demonstrativ
Elementele componente sunt:
Cilindru pneumatic orizontal, cu sensori pentru poziia de alimentare cu piese i pentru poziiile
inelor de evacuare a pieselor sortate,
Cilindru pneumatic verticat, cu senzori pentru poziii retras sau extins,
Dispozitiv de prindere,
Senzor de prezen pies n zona de alimentare,
Senzor de culoare,
Butoane Start i Reset cu lmpi
Poziionarea relativ a elementelor se poate observa n figura ce urmeaz.
Figura 4.1. Staia de sortare
3
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 40
4.3. Starea iniial
Starea iniial a staiei de lucru este definit dup cum urmeaz:
Cilindrul orizontal este poziionat deasupra zonei de alimentare;
Cilindrul vertical este retras;
Dispozitivul de prindere este nchis i nu reine pies.
4.4. Structurarea aplicaiei
nainte de programarea efectiv, se recomand direcionarea ateniei ctre o etap conceptual
n care aplicaia s fie discretizat n pai (faze tehnologice) i tranziii (condiii de trecere de la o faz la
alta). Pentru aplicaii simple aceast etap poate fi dezvoltat mental, dar, pentru aplicaii complexe i
pentru uurarea programrii, se impune conceperea unei diagrame de flux.
Pentru aplicaia de sortare, diagrama de flux propus este prezentat n paginile urmtoare:
A5 Tehnologii Industriale
A5 - Pag 41
1
Start
Aprinde lamp Reset 2
Buton Reset
apsat
Aducere staie n poziie iniial
Staia se afl n poziia iniial
3
4
P15
Ateapt buton Start
Aprinde lamp Start
Ate
apt
5
6
Pies disponibil n zona de alimentare
7
Staia se afl n
poziia iniial
Dispozitivul de prindere se deschide
Senzor cilindru vertical extins activ
Staie neresetat
Dispozitivul de prindere se nchide
Ateapt 500ms
Ateapt 3s
Cilindrul vertical avanseaz
8
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 42
Cilindrul orizontal avanseaz
9
Cilindrul vertical se retrage
Senzor cilindru vertical retras
activ i piesa are culoarea neagr
Senzor cilindru vertical retras
activ i piesa este colorat
10 11
Senzor cilindru orizontal
poziionat intermediar activ
Senzor cilindru orizontal capt
de curs activ
Cilindrul orizontal avanseaz
12
Cilindrul vertical avanseaz
Senzor cilindru vertical extins activ
13
Deschidere dispozitiv de prindere
Ateapt 500ms
Retragere cilindru vertical 14
Senzor cilindru vertical retras activ
15
Retragere cilindru orizontal
Senzor cilindru orizontal poziie alimentare activ activ
P5
A5 Tehnologii Industriale
A5 - Pag 43
4.5. Dezvoltarea aplicaiei sub mediul SIMATIC Manager
4.5.1. Crearea proiectului Sortare
Pentru nceput, se creaz un proiect nou cu denumirea Sortare i se definete automatul
utilizat aa cum s-au artat n subcapitolele Crearea unui proiect nou i Configurarea hardware a
proiectelor SIMATIC Manager.
4.5.2. Crearea listei de simboluri
Se definete lista de simboluri aa cum s-a artat n subcapitolul Lista de simboluri. Pentru
aplicaia considerat, lista este cea de mai jos:
4.5.3. Crearea funciei bloc S7-GRAPH i programarea secvenei
Pentru crearea unei funcii definite de utilizator i programarea secvenei se face dup cum
urmeaz:
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 44
Se marcheaz submeniul Blocks al aplicaiei care conine un bloc OB1 gol.
Se alege Insert S7 Block Function Block.
A5 Tehnologii Industriale
A5 - Pag 45
Din fereastra cu proprieti se alege limbajul de programare GRAPH, dup care se valideaz
apsnd OK.
Funcia proaspt creat este deschis cu dublu-click
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 46
Se deschide editorul pentru programarea structurat. Din diagrama de flux reiese c procesul
demareaz cu o divergen SAU pentru validarea conformitii poziiei actuale a standului cu
poziia descris anterior. Pentru introducerea ramurii paralele, se selecteaz pasul dup care se
dorete introducerea divergenei (Pasul S1 n cazul de fa), dup care se execut un click pe
pictograma Deschidere ramur alternativ
A5 Tehnologii Industriale
A5 - Pag 47
Se selecteaz tranziia dup care se dorete introducerea pasului 2, dup care se execut un
click pe pictograma Adugare Pas + Tranziie. La fel se va introduce i pasul 3.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 48
Pentru introducerea convergenei SAU se selecteaz ultima tranziie, dup care se execut un
click pe pictograma nchidere ramur alternativ.
A5 Tehnologii Industriale
A5 - Pag 49
Editorul solicit alegerea tranziiei dup care s se nchid ramura paralel. Se confirm poziia
cu un click.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 50
Pentru introducerea pasului 4 se selecteaz nodul de nchidere a ramificaiei, dup care se
execut un click pe pictograma Adugare Pas + Tranziie
A5 Tehnologii Industriale
A5 - Pag 51
Utiliznd informaiile prezentate, se introduce secvena aferent diagramei de flux pn la pasul
15 inclusiv. Se poate observa c pasul 15 este urmat de salt pe pasul 5. Pentru implementarea
acestuia se selecteaz tranziia dup ndeplinirea creia se efectueaz saltul, dup care se
execut click pe pictograma Salt. Secventa programat se poate urmri i n fereastra
Secven
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 52
Editorul cere precizarea pasului la care se efectueaz saltul. Conform diagramei de flux se va
introduce pasul 5.
4.5.4. Programarea Aciunilor
Programarea unei aciuni const n definirea unei instruciuni i a adresei (absolut sau
simbolic) la care se refer.
Principalele instruciuni sunt:
S Set Seteaz, cu reinere, adresa ce-i urmeaz la nivelul 1 logic,
R Reset Reseteaz, cu reinere, adresa ce-i urmeaz la nivelul 0 logic,
N Non holding Seteaz, fr reinere, adresa ce-i urmeaz la nivelul 1 logic doar atta timp
ct pasul este activ,
D Delay Seteaz, cu ntrziere, adresa ce-i urmeaz la nivelul 1 logic dup scurgerea timpului
impus de utilizator i se reseteaz la ieirea din pasul curent.
Programarea aciunilor sub mediul SIMATIC Manager se realizeaz urmnd indicaiile:
A5 Tehnologii Industriale
A5 - Pag 53
Se selecteaz pasul n care se dorete introducerea unei aciuni, dup care se execut un click pe
pictograma Introducere aciune.
n primul cmp se introduce indicativul instruciunii, iar n al doilea cmp se introduce adresa
absolut sau simbolic la care se refer instruciunea.
Pe baza celor artate, se vor introduce aciunile din imaginile de mai jos, corespunztoare
pailor fluxului:
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 54
4.5.5. Programarea tranziiilor
Tranziiile se programeaz cu ajutorul instruciunilor logice Contact normal deschis, Contact
normal nchis i Comparator, pe baza rezultatului unei operaii logice ntre o combinaie de astfel de
elemente.
Pentru a utiliza parametrii ai sistemului (cum ar fi timpul de cnd s-a intrat ntr-un anumit pas)
se utilizeaz instruciunea Comparator aa cum se arat mai jos inlocuind Numrul_Pasului.T cu
numrul pasului avut n vedere (exemplu Step6.T).
Programarea tranziiilor sub mediul SIMATIC Manager se realizeaz urmnd indicaiile:
A5 Tehnologii Industriale
A5 - Pag 55
Se selecteaz zona n care se dorete introducerea instruciunii, dup care se execut un click pe
una din instruciunile logice.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 56
pentru implementarea condiiilor compuse se alege zona n care se dorete introducerea unei
noi insctruciuni, dup care se execut click pe pictograma instruciunii dorite.
Pe baza celor artate, se vor introduce tranziiile din imaginile de mai jos, corespunztoare
condiiilor de trecere n diagrama de flux:
A5 Tehnologii Industriale
A5 - Pag 57
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 58
n final, aplicaia dezvoltat n scopul exemplificrii detaliilor specifice programrii secveniale
este prezentat n paginile urmtoare:
A5 Tehnologii Industriale
A5 - Pag 59
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 60
A5 Tehnologii Industriale
A5 - Pag 61
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 62
Secvena implementat se salveaz i se inchide editorul.
4.5.6. Includerea funciei bloc programat secvenial n programul principal
Funcia cu derulare ciclic, n care se implementeaz programul principal care va apela funcia
definit de utilizator, este OB1.
Paii pentru realizarea acestei sarcini sunt:
A5 Tehnologii Industriale
A5 - Pag 63
Din meniul Blocks, se deschide, cu dublu click, funcia OB1.
Se poate observa c mediul de dezvoltare a introdus automat o serie de alte funcii. Acestea
specific modul n care va fi rulat aplicaia dezvoltat de utilizator n funcie de performanele
automatului (FC72 i SFC64) sau organizeaz, sub forma unei baze de date, parametrii ce in de
dinamica funciei bloc (DB1 pentru parametrii funciei FB1)
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 64
Dup deschiderea editorului, se selecteaz prima ramur, se indentific, n fereastra din stnga,
meniul FB Blocks i se efectueaz dublu click pe funcia bloc FB1 pentru introducerea ei.
A5 Tehnologii Industriale
A5 - Pag 65
Se efectueaz un click n zona simbolurilor ??? i se completeaz cu baza de date (DB1) aferent
funciei FB1, iar intrarea corespunztoare intrrii INIT_SQ se completeaz cu M0.0 (se
precizeaz numrul pasului de la care se ncepe rularea secvenei programate). Dup ce aplicaia
va fi ncrcat n memoria automatului, se trece n modul de funcionare ONLINE, unde M0.0
trebuie setat cu valoarea 1.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 66
Se salveaz modificrile fcute i se nchide editorul.
A5 Tehnologii Industriale
A5 - Pag 67
Se selecteaz meniul Blocks i doar apoi s execut click pe pictograma Download. Aceasta
deoarece toate blocurile trebuie rescrise n memoria automatului.
Se alege All pentru a confirma suprascrierea tuturor blocurilor.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
A5 - Pag 68
B1 - Pag 1
Platforme mecatronice n
educaie i formare
1. Dezvoltarea aplicaiilor utiliznd conceptul HIL
2. Dezvoltarea aplicaiilor utiliznd conceptul SIL
B1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B1 - Pag 2
Dezvoltarea aplicaiilor utiliznd conceptul HIL
Descrierea aplicaiei
Sistemul de sortare din Fig. 1.1 este alctuit din dou benzi transportoare A i B cu direcii diferite
de deplasare, un cilindru hidraulic pentru manipularea piesei dorite un buton de comand (START) i o
lamp de semnalizare. La apsarea butonului START, tija pistonului se extinde i mpinge piesa de pe banda
A pe banda B, astfel realizndu-se procesul de sortare. La eliberarea butonului START, tija pistonului se
retrage n poziia iniial. Pentru semnalizare procesului de sortare, la apsarea butonului de comand se
aprinde lampa L1. Sunt folosite un numr redus de componente electrice i hidraulice, scopul aplicaiei fiind
acela de familiarizare cu mediul de simulare FluidSIM Hydraulics 4.0 i mediul de programare a PLC-urilor
SIMATIC STEP 7.
Fig.1.1. Sistemul de sortare
1
Banda A
Banda B
Cilindru
Hidraulic
Buton START
+ Lamp
B1 Platforme mecatronice n educaie i formare
B1 - Pag 3
Modelarea i simularea sistemului de sortare
Pentru modelarea i simularea aplicaiei se va utiliza tehnologia SIEMENS-FESTO, respectiv mediile
Simatic STEP7 i FluidSim H. Procesul va fi simulat n FluidSim H iar controlerul va fi unul real i va comunica
prin interfaa EasyPort cu procesul. O astfel de abordare (HIL hardware in the loop Fig. 1.2) este extrem de
util n studiul i proiectarea sistemelor, permind aducerea procesului industrial n laborator.
Fig.1.2. Conceptul HIL (hardware in the loop)
Ieiri controler
Semnale de intrare n proces
EasyPort D16
Controler real
Modelul procesului simulat
Comunicare
RS-232
Semnale de ieire din proces
Modelul procesului simulat
Comunicare
RS-232
Intrri controler
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B1 - Pag 4
Modelarea procesului n FluidSim H
n Fig. 1.3 este prezentat modelul procesului realizat n FluidSim H. S-au folosit urmtoarele notaii:
A1 actuator hidraulic cu dubl acionare
E1 electromagnetul distribuitorului ce acioneaz cilindrul hidraulic
B1 Butonul START
L1 Lamp de semnalizare
Modelul este alctuit din circuitul hidraulic, circuitul electric i blocurile de intrri/ieiri destinate
transferului de informaie dintre procesul simulat i controlerul real. Butonul START este legat la portul 0 al
blocul FluidSIM Out, iar electromagnetul i lampa la porturile 0 i 1 la blocul FluidSIM In. Comunicarea dintre
proces i controler se realizeaz prin intermediul driverului EzOPC, pus la dispoziie utilizatorilor de firma
FESTO. Astfel c:
1. Poziia iniial a sistemului este cea din Fig. 1.3.a.
2. La apsarea butonului START, pistonul cilindrului A1 va avansa, iar lampa L1 va semnaliza
aceast aciune.
3. La eliberarea butonului START, pistonul cilindrului A1 se retrage n poziia iniial, iar lampa L1
nu mai semnalizeaz.
Tranziia butonului START din 0 logic n 1 logic (24V) este interpretat de PLC ca i intrare i n
consecin activeaz ieirile 0 i 1 dup cum se poate observa n Fig. 1.3.b.
a) b)
Fig.1.3. Circuitul hidraulic + Circuitul de comand
B1 Platforme mecatronice n educaie i formare
B1 - Pag 5
Programarea controlerului utiliznd Simatic STEP 7
Programarea PLC-ului se va face prin intermediul mediului Simatic STEP7. Programul este unul
simplu, avnd o singur ramur Ladder dup cum se poate vedea n Fig. 1.5. S-a creeat i o list de simboluri
(Fig. 1.4) pentru a facilita o mai bun nelegere a programului.
Funcionarea programului e una simpl. La apsarea butonului START din modelul procesului
(Fig.X.b), PLC-ul sesizeaz modificarea adresei B_Start i n consecin acioneaz (24V) electromagnetul
distribuitorului E1 i lampa de semnalizare L_Start. Cele dou semnale de ieire sunt transmise ctre model
avnd ca efect avansul cilindrului cu piston (Fig.X.b). La eliberarea butonului START cilindrul se va retrage i
lampa nu va mai semnaliza (Fig.X.a).
Fig.1.4. List de simboluri
Fig.1.5. Diagrama Ladder
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B1 - Pag 6
Dezvoltarea aplicaiilor utiliznd conceptul SIL
Se deschide programul COSIMIR PLC i din meniul FileOpen se alege modelul staiei de procesare
dorit (Fig. 2.1). Pentru aceeai staie exist dou fiiere, dintre care unul conine n denumire i abrevierea
(OPC). Acesta din urm este conceput spre a fi controlat de ctre un PLC real. Modelul ce nu conine n
denumire abrevierea (OPC) simuleaz i automatul industrial.
Fig.2.1. ncarcarea modulelor n mediul COSIMIR PLC
Simularea procesului este demarat alegnd ExecuteStart. Staia devine interactiv, utilizatorul
avnd posibilitatea folosirii butoanelor i pieselor. Starea intrrilor i ieirilor este afiat n timp real.
Fig.2.2. Start simulare
2
B1 Platforme mecatronice n educaie i formare
B1 - Pag 7
Pe aceeai staie se poate ncrca un alt program dect cel implicit. Pentru a realiza acest lucru, din
meniul FileOpen se alege calea aplicaiei dezvoltate de utilizator (Fig. 2.3). Se alege fiierul de tip *.S7P i
se deschide.
Fig.2.3. Selectarea aplicaiei dezvoltate de utilizator
Dac sunt mai multe programe n acel proiect, se alege pe cel dorit i se ncarca automat in PLC-ul
virtual (Fig. 2.4).
Fig.2.4. Alegerea noului program
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B1 - Pag 8
Ca i controler extern, dar tot virtual, putem folosi unealta software S7-PLCSIM pentru a genera un
PLC simulat. Pentru aceasta (Fig. 2.5), din meniul Options al mediului SIMATIC Manager, se alege Simulate
Module.
Fig.2.5. Crearea unui PLC simulat
Fig.2.6. Fereastra S7-PLCSIM
ncrcarea unei aplicaii n automatul virtual generat cu S7-PLCSIM (Fig. 2.6) se face din meniul
PLCDownload.
B1 Platforme mecatronice n educaie i formare
B1 - Pag 9
Comunicarea dintre cele dou elemente, automatul virtual din S7-PLCSIM i modulul simulat de
mediul COSIMIR PLC, se face prin programul EzOPC, care se configurez conform schemei (Fig. 2.7 2.9):
Fig.2.7. Configurarea procesului i a controlerului
Fig.2.8. Configurarea modulelor I/O
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B1 - Pag 10
Fig.2.9. Mediul S7-PLCSIM dup conectarea la procesul virtual
B2 - Pag 1
Sisteme de acionare pentru
aplicaii industriale
1. Circuite convenionale de acionare hidraulic
Circuite convenionale de acionare hidraulic
S se implementeze in Fluid SIM-H circuitele de acionare hidraulic i s se identifice rolul fiecrui
element din structura acestora.
a
1
b
2
c
4 3
3
B2
1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B2 - Pag 2
Varianta d se recomand atunci cnd pe poziia median a distribuitorului 5 se dorete ca pistonul
s se mite liber, adic s aib o poziie flotant, sub aciunea unor fore exterioare.
Viteza de avans a tijei poate fi uneori mrit fr a mri debitul pompei, prin recircularea lichidului
de lucru din camera mic spre camera mare, cu un distribuitor 6 cu patru poziii (varianta e) care, nefiind
uzual, se nlocuiete de obicei cu dou distribuitoare cu dou poziii sau cu supapele de sens 8, pilotate
corespunztor prin distribuitorul 7 (varianta f).
F
6
5
F
7
8
e f
d
Pentru alimentarea comun a unui multiplu de cilindri se poate folosi una din variantele urmtoare
astfel: n varianta g cilindrii pot fi alimentai pe rnd sau individual, acionarea unui distribuitor fcnd
imposibil comanda celui care urmeaz.
g
Varianta h permite comanda simultan a motoarelor n anumite condiii.
B2 Sisteme de acionare pentru aplicaii industriale
B2 - Pag 3
h
Varianta i permite comanda simultan sau succesiv: primul cilindru este alimentat de la pomp, iar
urmtorii de la cilindrul anterior (deplasarea cilindrilor este sincron, dar cu viteze diferite, funcie de
valorile diametrelor pistoanelor i tijelor). Presiunea la pomp este egal cu suma presiunilor din cilindrii
acionai n serie.
i
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B2 - Pag 4
B3 - Pag 1
Controlul Sistemelor
Industriale I
1. Exerciiul 1 Funcia YES (DA)
2. Exerciiul 2 Funcia NOT (NEGAT)
3. Exerciiul 3 Funcia AND (I)
4. Exerciiul 4 Funcia OR (SAU)
5. Exerciiul 5 Funcii compuse (I/SAU/NEGAT)
6. Exerciiul 6 Sistem de control logic cu ramificaie
7. Exerciiul 7 Setare/Resetare Ieire
Aplicaii elementare de programare a sistemelor industriale.
Dezvoltarea aplicaiilor industriale.
Teme/noiuni/problematica tratat:
Controlul micrii in sistemele electropneumatice. Diagrame funcionale.
Temporizatore (TP, TON, TOFF). Numrtoare.
Medii de dezvoltare a aplicaiilor. Limbaje de programare.
Limbajul Ladder Diagram - operanzi (SBO,MBO), operatori, instruciuni.
Proiectarea aplicaiilor.
Subcapitolul include o colecie de aplicaii elementare inspirate din mediul industrial. Aplicaiile, aa
cum sunt definite, nu sunt legate neaprat de o anumit structur hardware, ele putnd fi implementate
att pe staiile modulare de producie, ct i pe alte sisteme similare sau chiar utiliznd medii de simulare
(Fluid-SIM, Cosimir-PLC). Gama de aplicaii propus include utilizarea temporizatoarelor, numrtoarelor
sau a altor funcii elementare. Implementarea pe PLC-urile reale implic utilizarea mediilor industriale de
dezvoltare a aplicaiilor, respectiv cunoaterea acestora. Aici se trateaz modul de implementare a
aplicaiilor industriale pe tehnologia Siemens Step 7, respectiv tehnicile de proiectare structurat: Metoda
biilor secveniali i Grafcet. Sunt oferite soluii pentru rezolvarea problemelor propuse.
B3
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 2
Exerciiul 1 Funcia YES (DA)
Descrierea problemei
Apsarea butonului (S1) are ca efect aprinderea lmpii (H1). Lampa va ilumina atta timp ct
butonul este apsat.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
1
B3 Controlul Sistemelor Industriale I
B3 - Pag 3
Soluia exerciiului 1
Schema electric a circuitului
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton S1
Ieire0_0 *Ieire] BOOL Lamp H1
Diagrama Ladder
I
O
PLC
24V
0V
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
0.0 0.1 0.2 0.3
24V
0V
0V
S1
H1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 4
Exerciiul 2 Funcia NOT (NEGAT)
Descrierea problemei
Un fir subire este ntins n spatele unei ferestre, ce se rupe n eventualitatea unei intrri prin
efracie. Un circuit nchis este intrerupt, fapt ce are ca i rezultat declanarea unei alarme.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
2
B3 Controlul Sistemelor Industriale I
B3 - Pag 5
Soluia exerciiului 2
Schema electric a circuitului
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Senzor S1
Ieire0_0 *Ieire] BOOL Sirena H1
Diagrama Ladder
I
O
PLC
24V
0V
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
0.0 0.1 0.2 0.3
24V
0V
0V
S1
H1
Intrare0_0 Ieire0_0
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 6
Exerciiul 3 Funcia AND (I)
Descrierea problemei
Presa pneumatic (1.0) are voie s avanseze doar dac un buton este apsat i un grilaj de protecie
acoper zona de prelucrare. Dac una din aceste condiii nu este ndeplinit, presa se va retrage imediat.
Grilajul de protecie este monitorizat de un senzor de proximitate B1. Presa avanseaz sau se
retrage prin intermediul unei valve electromagnetice cu arc (Y1).
analizai schema electro-pneumatic a sistemului din figur.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
3
B3 Controlul Sistemelor Industriale I
B3 - Pag 7
Soluia exerciiului 3
Schema electro-pneumatic a sistemului
Schema electric a sistemului
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 8
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton START S1
Intrare0_1 [Intrare] BOOL Senzor proximitate B1
Ieire0_0 *Ieire+ BOOL Valv Y1
Diagrama Ladder
Intrare0_0 Intrare0_1
Ieire0_0
B3 Controlul Sistemelor Industriale I
B3 - Pag 9
Exerciiul 4 Funcia OR (SAU)
Descrierea problemei
Fiecare din cele dou intrri ale unui depozit sunt prevzute cu buton pentru soneria din camera
portarului. Acesta trebuie s sune la apsarea independent a oricruia din cele dou butoane.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
4
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 10
Soluia exerciiului 4
Schema electric a circuitului
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton S1
Intrare0_1 [Intrare] BOOL Buton S2
Ieire0_0 *Ieire] BOOL Soneria H1
Diagrama Ladder
LD Input0_1
OR Input0_2
ST Outuput0
Intrare0_0 Ieire0_0
Intrare0_1
B3 Controlul Sistemelor Industriale I
B3 - Pag 11
Exerciiul 5 Funcii compuse I/SAU/NEGAT
Descrierea problemei
Un dispozitiv de tanare poate opera din trei zone de lucru diferite. Pe orice canal am introduce
piesa de lucru, aceasta intr n contact cu doi din trei senzori de proximitate B1, B2 i B3. Acest lucru are ca
efect extinderea cilindrului 1.0 prin intermediul valvei electromagnetice (Y1) i imprimarea unui traseu n
piesa de lucru.
Ciclul de tanare este declanat doar dac semnalele a doi senzori sunt identice. Din motive de
siguran, cilindrul nu trebuie s avanseze dac toi senzorii sunt n contact cu piesa.
analizai schema electro-pneumatic a sistemului din figur.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
5
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 12
Soluia exerciiului 5
Schema electro-pneumatic a sistemului
Schema electric a sistemului
B3 Controlul Sistemelor Industriale I
B3 - Pag 13
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Senzor proximitate B1
Intrare0_1 [Intrare] BOOL Senzor proximitate B2
Intrare0_2 [Intrare] BOOL Senzor proximitate B3
Ieire0_0 *Ieire] BOOL Valv Y1
Diagrama Ladder
Intrare0_0
Intrare0_0
Intrare0_0
Intrare0_1 Intrare0_2
Intrare0_1
Intrare0_1 Intrare0_2
Intrare0_2
Ieire0_0
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 14
Exerciiul 6 Sistem de control logic cu ramificaie
Descrierea problemei
Dozarea compuilor unui amestec se realizeaz cu ajutorul instalaiei din figura urmtoare. Aceasta
este prevzut cu butonul S1 i cu selectorului S2. Pentru deversarea unui compus se alege mai nti silozul
A sau B cu ajutorul selectorului S2 dup care se apas butonul S1.
analizai schema electro-pneumatic a sistemului din figur.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
6
B3 Controlul Sistemelor Industriale I
B3 - Pag 15
Soluia exerciiului 6
Schema electro-pneumatic a sistemului
Schema electric a sistemului
v=0
4(A) 2(B)
3(S) 5(R)
1(P)
Y1
v=0
4(A) 2(B)
3(S) 5(R)
1(P)
Y2
SILO A SILO B
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 16
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton START S1
Intrare0_1 [Intrare] BOOL Selector S2
Ieire0_0 *Ieire] BOOL Retragere Cilindru A Y1
Ieire0_1 *Ieire] BOOL Retragere Cilindru B Y1
Diagrama Ladder
Intrare0_0
Intrare0_0 Intrare0_
1
Intrare0_1 Ieire0_0
Ieire0_1
B3 Controlul Sistemelor Industriale I
B3 - Pag 17
Setare/Resetare Ieire
Informaii necesare
Circuitele de memorare sunt elemente de baz n operaiile unui PLC i i gsesc aplicabilitate n
situaiile n care un semnal de intrare este stocat permanent n ieire. Exemple tipice cu circuite de
memorare sunt situaiile n care o anumit ieire trebuie setat sau resetat permanent. Blocurile standard
pentru realizarea acestor funcii sunt blocurile SR i RS.
Blocul SR, bistabil cu setare dominant
Blocul de tip SR conine un bistabil cu setare dominant.
Comportamentul acestui bloc este urmtorul:
un semnal 1 logic n intrarea S1 seteaz bistabilul, ieirea Q1 devine 1 logic.
un semnal 1 logic n intrarea R reseteaz bistabilul, ieirea Q1 devine 0 logic, ns doar dac simultan
se aplic un 0 logic n intrarea S1.
un semnal 1 logic aplicat n ambele intrri S1 i R seteaz bistabilul, ieirea Q1 devine 1 logic.
Descrierea problemei
Burghiul unei maini de gurit este monitorizat de ctre un senzor (B1).
Dac burghiul se stric din diverse motive de prelucrare, senzorul transmite PLC-ului informia pentru
oprirea mainii de gurit. Un element de avertizare sonor (siren) (H1) are rolul de a semnaliza auditiv
aceast defeciune, iar oprirea lui se poate realiza doar prin itermediul butonului S1.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
7
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 18
Soluia exerciiului 7
Schema electric a sistemului
Variabile
Nume Atribut Tip Comentarii
Intrare0_0 [Intrare] BOOL Buton S1
Intrare0_1 [Intrare] BOOL Senzor B1
Ieire0_1 [Ieire] BOOL Buzzer H1
B3 Controlul Sistemelor Industriale I
B3 - Pag 19
Diagrama Ladder
Ieire0_0
Intrare0_1
S
Intrare0_0
Ieire0_0
R
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B3 - Pag 20
B4 - Pag 1
Controlul Sistemelor
Industriale II
1. Exerciiul 1 Transferul unei piese
2. Exerciiul 2 Acionarea unui cilindru
3. Exerciiul 3 Lipirea a dou semifabricate
4. Exerciiul 4 Dispozitiv de tanare
5. Exerciiul 5 Dispozitiv de prindere
6. Exerciiul 6 Dispozitiv de ndoire cu numrtor
7. Exerciiul 7 Dispozitiv de ridicat pachete
Aplicaii elementare de programare a sistemelor industriale.
Dezvoltarea aplicaiilor industriale.
Teme/noiuni/problematica tratat:
Controlul micrii in sistemele electropneumatice. Diagrame funcionale.
Temporizatore (TP, TON, TOFF). Numrtoare.
Medii de dezvoltare a aplicaiilor. Limbaje de programare.
Limbajul Ladder Diagram - operanzi (SBO,MBO), operatori, instruciuni.
Proiectarea aplicaiilor.
Subcapitolul include o colecie de aplicaii elementare inspirate din mediul industrial. Aplicaiile, aa
cum sunt definite, nu sunt legate neaprat de o anumit structur hardware, ele putnd fi implementate
att pe staiile modulare de producie, ct i pe alte sisteme similare sau chiar utiliznd medii de simulare
(Fluid-SIM, Cosimir-PLC). Gama de aplicaii propus include utilizarea temporizatoarelor, numrtoarelor
sau a altor funcii elementare. Implementarea pe PLC-urile reale implic utilizarea mediilor industriale de
dezvoltare a aplicaiilor, respectiv cunoaterea acestora. Aici se trateaz modul de implementare a
aplicaiilor industriale pe tehnologia Siemens Step 7, respectiv tehnicile de proiectare structurat: Metoda
biilor secveniali i Grafcet. Sunt oferite soluii pentru rezolvarea problemelor propuse.
B4
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 2
Exerciiul 1 Transferul unei piese
Descrierea problemei
Folosind un cilindru pneumatic cu dubl aciune, s se mute o pies de pe o band transportoare pe
alta. Operaia va fi executat la apsarea unui buton. Retragerea trebuie s fie automat.
analizai schema electro-pneumatic a sistemului din figur.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
1
B4 Controlul Sistemelor Industriale II
B4 - Pag 3
Soluia exerciiului 1
Schema electro-pneumatic a sistemului
Schema electric a sistemului
4(A) 2(B)
3(S) 5(R)
1(P)
Y1 Y2
Y2
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 4
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton Start S1
Intrare0_1 [Intrare] BOOL Cilindrul A Retras B1
Intrare0_2 [Intrare] BOOL Cilindrul A Extins B2
Ieire0_0 [Ieire] BOOL Avans Cilindru A Y1
Ieire0_1 [Ieire] BOOL Retragere Cilindru A Y1
Diagrama Ladder
Intrare0_0
S
S
Intrare0_1
Intrare0_2
Ieire0_0
Ieire0_1
Ieire0_1
Ieire0_0
R
R
B4 Controlul Sistemelor Industriale II
B4 - Pag 5
Exerciiul 2 Acionarea unui cilindru
Fronturile semnalelor digitale
Informaii necesare
Aplicaiile bazate pe PLC-uri necesit frecvent detectarea i evaluarea punctelor n care semnalele
logice trec din 1 n 0 sau din 0 n 1 logic. Aceste schimbri poart denumirea fronturi.
Fronturile cresctoare reprezint trecerea semnalului din 0 n 1 logic.
Fronturile descresctoare reprezint trecerea semnalului din 1 n 0 logic.
Funcia bloc R_TRIG pentru detecia frontului cresctor
Aceast funie standard este utilizat pentru detecia frontului cresctor.
Dac n intrarea CLK are loc o schimbare de front din 0 n 1 logic, ieirea Q devine 1 logic pe tot parcursul
unui ciclu de program.
2
Front cresctor Front descresctor
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 6
Funcia bloc F_TRIG pentru detecia frontului descresctor
Aceast funie standard este utilizat pentru detecia frontului descresctor.
Dac n intrarea CLK are loc o schimbare de front din 1 n 0 logic, ieirea Q devine 1 logic pe tot
parcursul unui ciclu de program.
Descrierea problemei
Un cilindru este acionat cu o valv electromagnetic cu arc (Y1). Doi senzori de proximitate
semnalizeaz cele dou poziii ale cilindrului, extins (B2) i retras (B1). Butonul (S1) este utilizat pentru
acionarea cilindrului din poziia de retras n poziia de extins. Cilindrul trebuie s avanseze o singur dat la
apsarea butonului. Pentru a genera o nou micare, butonul trebuie eliberat i apsat din nou.
analizai schema electro-pneumatic a sistemului din figur.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
B4 Controlul Sistemelor Industriale II
B4 - Pag 7
Soluia exerciiului 2
Schema electro-pneumatic a sistemului
Schema electric a sistemului
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 8
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton START S1
Intrare0_1 [Intrare] BOOL Cilindru retras B1
Intrare0_2 [Intrare] BOOL Cilindru extins B2
Flag1 [Intern] BOOL Bit de stare 1
Ieire0_0 [Ieire] BOOL Valv Y1
Nume Funcie sau Funcie Bloc Comentariu
R_TRIG_1 R_TRIG Front cresctor 1
Diagrama Ladder
Intrare0_0
S
Intrare0_1
Ieire0_0
Ieire0_0
R
R_TRIG_1
R_TRIG
B4 Controlul Sistemelor Industriale II
B4 - Pag 9
Exerciiul 3 Lipirea a dou semifabricate
Temporizatorul de tip puls
Informaii necesare
Un numr mare de aplicaii specifice controlului automat al proceselor implic programarea unor
aciuni cu o anumit amplasare temporal relativ fa de momentul ndeplinirii unei condiii sau unele fa
de altele. Standardul IEC61131-3 definete mai multe tipuri de blocuri de temporizare n funcie de
rspunsul lor n timp.
Funcia bloc TP, temporizator de tip puls
Rspunsul funciei bloc TP:
Funcia de temporizare este pornit printr-un semnal aplicat intrrii IN.
Dup pornirea temporizatorului, ieirea Q este setat la nivelul 1 Logic i va rmne aa pe o
perioad de timp egal cu cea dat la intrarea PT.
Valoarea curent a temporizatorului (timpul scurs de la momentul pornirii acestuia) este disponibil
utilizatorului la ieirea ET.
Temporizatorul poate fi repornit doar dup ce sesiunea precedent s-a ncheiat.
3
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 10
Descrierea problemei
Dou semifabricate trebuie lipite mpreun cu ajutorul unui cilindru pneumatic. Pentru aceasta,
suprafeele de lipit trebuie presate cu o for predefinit aplicat timp de 5secunde.
Cilindrul este acionat prin intermediul distribuitorului Y1. Dup scurgerea celor 5secunde, pistonul trebuie
s revin automat n poziia iniial. Tot acest proces este demarat la apsarea butonului S1.
analizai schema circuitului electro-pneumatic a sistemului din figur.
analizai schema circuitului electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
Soluia exerciiului 3
B4 Controlul Sistemelor Industriale II
B4 - Pag 11
Schema electro-pneumatic a sistemului
Schema electric a sistemului
Variabile
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 12
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton START S1
Intrare0_1 [Intrare] BOOL Cilindrul 1.0 Retras B1
Ieire0_0 [Ieire] BOOL Bobina Cilindrului Y1
Diagrama Ladder
TP Intrare0_0 Intrare0_1
PT
Q
Ieire0_0
ET T#5s
B4 Controlul Sistemelor Industriale II
B4 - Pag 13
Exerciiul 4 Dispozitiv de tanare
ntrziere la apariia frontului cresctor
Informaii necesare
Funcia bloc TON, temporizator de ntrziere la generarea frontului cresctor
Temporizatorul TON este utilizat pentru a genera o ntrziere la apariia frontului cresctor.
Comportamentul acestui bloc este urmtorul:
funcia bloc TON este pornit prin aplicarea unui semnal 1 logic la intrarea IN.
dup expirarea timpului specificat la intrarea PT, ieirea Q devine 1 logic. Valoarea se menine pn
cnd intrarea IN devine 0 logic.
dac durata semnalului de intrare IN este mai mic dect timpul specificat la intrarea PT, valoarea
ieirii Q rmne constant 0.
timpul scurs de la pornirea temporizatorului se poate citi la ieirea ET.
4
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 14
Descrierea problemei
O pies de lucru trebuie tanat la activarea butonului de START (S1). Pentru a ne asigura ca
procesul de tanare nu se declaneaz necorespunztor, procesul de tanare se va declana la trei secunde
dup ce piesa de prelucrat se afl n poziia de tanare. n tot acest timp, butonul de START trebuie s fie
apsat. Poziia cilindrului 1.0 este stabilit prin intermediul senzorilor de proximitate B1 (retras) i B2
(extins). Cilindrul este controlat de o valv electromagnetic cu arc (Y1).
analizai schema electro-pneumatic a sistemului din figur.
Analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
B4 Controlul Sistemelor Industriale II
B4 - Pag 15
Soluia exerciiului 4
Schema electro-pneumatic a sistemului
Schema electric a sistemului
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 16
Variabile
Nume Atribut Tip Comentarii
Intrare0_0 [Intrare] BOOL Buton START S1
Intrare0_1 [Intrare] BOOL Cilindru retras B1
Intrare0_2 [Intrare] BOOL Cilindru retras B2
Ieire0_0 [Ieire] BOOL Valva Y1
Diagrama Ladder
TON
IN
PT
Q
Ieire0_0
ET
T#3s
S
Intrare0_2 Ieire0_0
R
TON_1
B4 Controlul Sistemelor Industriale II
B4 - Pag 17
Exerciiul 5 Dispozitiv de prindere
ntrziere la apariia frontului descresctor
Informaii necesare
Funcia bloc TOF, temporizator de ntrziere la generarea frontului descresctor
Rspunsul funciei bloc TOF:
blocul TOF este activat prin aplicarea unui semnal 1Logic la intrarea IN, moment n care ieirea Q
primete valoarea 1.
dup ce semnalul aplicat intrrii IN i schimb valoarea n 0 logic, ieirea Q mai rmne setat la
nivelul 1 logic pentru o perioad de timp egal cu cea specificat la intrarea PT nainte de a returna
0 logic.
5
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 18
Descrierea problemei
Un semifabricat este prins de cilindrul 1.0 dup apsarea butonului S1. Cilindrul avanseaz pentru a
permite cilindrului 2.0 s taneze semifabricatul. Acestuia trebuie s i se permit un timp de 3secunde
pentru a se rci nainte de a trece mai departe.
analizai schema circuitului electro-pneumatic pentru sistemul din figur.
analizai schema circuitului electric pentru sistemul din figur.
formulai un program utiliznd diagrame Ladder.
B4 Controlul Sistemelor Industriale II
B4 - Pag 19
Soluia exerciiului 5
Schema electro-pneumatic a sistemului
Schema electric a sistemului
B1 B2
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 20
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton Start S1
Intrare0_1 [Intrare] BOOL Cilindrul 1.0 Retras B1
Intrare0_2 [Intrare] BOOL Cilindrul 1.0 Extins B2
Intrare0_3 [Intrare] BOOL Cilindrul 2.0 Retras B3
Intrare0_4 [Intrare] BOOL Cilindrul 2.0 Extins B4
Ieire0_0 [Ieire] BOOL Bobina Cilindrului 1.0 Y1
Ieire0_1 [Ieire] BOOL Avans Cilindru 2.0 Y2
Ieire0_2 [Ieire] BOOL Retragere Cilindru 2.0 Y3
Diagrama Ladder
TOF
Intrare0_0 Intrare0_1
IN
PT
Q
Ieire0_0
ET
T#3s
Intrare0_2 Ieire0_1
S
Intrare0_3
Intrare0_3
Intrare0_4 Ieire0_1
R
Ieire0_2
S
Intrare0_3 Ieire0_2
R
TOF_1
R_TRIG_1
R_TRIG
CLK Q
B4 Controlul Sistemelor Industriale II
B4 - Pag 21
Exerciiul 6 Dispozitiv de ndoire cu numrtor
Numrtoare
Informaii necesare
Funcia bloc CTU, numrtor incremental
Funcia bloc CTU realizeaz funcia de numrare cresctoare. Interfaa este definit prin intermadiul
a trei parametrii de intrare i a doi parametrii de ieire.
Funcionarea acestui bloc este urmtoarea:
un semnal 1 logic aplicat intrrii de reset R aduce la 0 valoarea curent a evenimentelor numrate,
valoare ce este disponibil la ieirea CV a funciei bloc CTU.
valoarea CV a evenimentelor numrate este incremendat cu 1 la detectarea fiecrui front
cresctor al semnalului aplicat intrrii CU.
un semnal 1 logic este generat la ieirea Q de ndat ce valoare curent a evenimentelor numrate
este egal cu sau depete valoarea impus de programator prin intermediul intrrii PV.
6
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 22
Funcia bloc CTD, numrtor decremental
Funcia bloc CTD realizeaz funcia de numrare descresctoare.
Funcionarea acestui bloc este urmtoarea:
un semnal 1 logic aplicat intrrii LD impune setarea ieirii CV la valoarea prezent la intrarea PV.
fiecare front cresctor al semnalului aplicat la intrarea CD decrementeaz unitar valoarea CV.
ieirea Q rmne la nivelul 0 logic atta timp ct valoarea curent a ieirii CV este mai mare dect 0.
Cnd acesta devine egal cu sau este mai mic de 0, funcia genereaz un semnal 1 logic la ieirea
Q.
Descrierea problemei
Un cilindru pneumatic cu dubl aciune este utilizat n procesul de ndoire ilustrat mai jos. Dup
executarea a 5 ndoiri trebuie s se opreasc. Ciclul este demarat prin apsarea unui buton. Cilindrul este
acionat prin intermediul unui distribuitor electromagnetic cu reveni re cu arc.
analizai schema circuitului electro-pneumatic pentru sistemul din figur.
analizai schema circuitului electric pentru sistemul din figur.
formulai un program utiliznd diagrame Ladder.
B4 Controlul Sistemelor Industriale II
B4 - Pag 23
Soluia exerciiului 6
Schema electro-pneumatic a sistemului
Schema electric a sistemului
B2 B1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 24
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Buton Start S1
Intrare0_1 [Intrare] BOOL Cilindrul 1.0 retras B1
Intrare0_2 [Intrare] BOOL Cilindrul 1.0 extins B1
Flag1 [Intern] BOOL Bit de stare 1
Flag2 [Intern] BOOL Bit de stare 2
Ieire0_0 *Ieire+ BOOL Avans cilindru 1.0 Y1
Nume Funcia bloc Comentariu
CTU_1 CTU Numrtor incremental 1
R_TRIG_1 R_TRIG Detectare front cresctor 1
R_TRIG_2 R_TRIG Detectare front cresctor 2
RS_1 RS Bistabil RS 1
RS_2 RS Bistabil RS 2
Diagrama Ladde
Intrare0_2 Ieire0_0
CTU Intrare0_2
CU
PV
Q
Flag2
CV
Flag2
Intrare0_1 Flag1
Intrare0_0 Flag1
Flag1
5
RESET
S
S
R
CTU_1
R_TRIG_1
Q
R_TRIG_2
R_TRIG
B4 Controlul Sistemelor Industriale II
B4 - Pag 25
Exerciiul 7 Dispozitiv de ridicat pachete
Secven liniar
Informaii necesare
Sisteme de control secveniale
Sistemele de control secveniale descriu procese care se succed relativ unele fa de altele n etape
delimitate clar. Aceste etape ale unui proces vor fi numite n continuare pai.
Tranziia de la un pas la urmtorul este dependent de starea unor parametrii intrinseci i/sau
extrinseci. Exist cazuri n care procesul este ramificat n diverse sub-procese (se dorete declanarea unor
aciuni diferite) n funcie de starea curent a parametrilor.
Programarea unui sistem de control secvenial trebuie s aib n vedere trei elemente de baz:
Aciuni de executat:
Pai
Evenimente interogative:
Tranziii
(Condiii de trecere la pasul urmtor)
Stabilirea cilor de
continuare a procesului:
Ramificri
Setarea i resetarea ieirilor
Setarea i resetarea memoriilor
Setarea i resetarea
temporizatoarelor i a
numrtoarelor
Interogarea intrrilor i a
memoriilor
Interogarea temporizatoarelor
Interogarea numrtoarelor
Alegerea unei ci
Desfurarea de aciuni n
paralel
7
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 26
Diagrama unui proces secvenial
Exemplu de divergen i convergen I dubl
1
Aciuni aferente pasului 2
2 Iniializri
3 Aciuni aferente pasului 3
1
2
Condiiile de tranziie
2
4 Aciuni aferente pasului 4
Condiiile de tranziie
3
Condiiile de tranziie
4
Condiiile de tranziie
1
2
3
101
1
2
3
B_Start
Proces1
Sfrit Proces 1
Ateapt proces 2
Condiie de continuare
1
Proces2
Sfrit Proces 2
101
Iniializri
Ateapt proces 1
102
B4 Controlul Sistemelor Industriale II
B4 - Pag 27
Descrierea problemei
O band transportoare cu role este monitorizat de un senzor de proximitate B1 pentru stabilirea
prezenei unui pachet, caz n care acesta este ridicat de cilindrul 1A i transferat pe o alt band
transportoare prin intermediul cilindrului 2A.
Cilindrii sunt acionai prin intermediul celor 2 distribuitoare cu bobin (notate Y1 i Y2) i revenire cu arc.
Cei 2 cilindrii sunt prevzui cu senzori de capt de curs (notai B2 pn la B5).
analizai schema electro-pneumatic a sistemului din figur.
analizai schema electric a sistemului din figur.
formulai un program utiliznd diagrame Ladder.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 28
Soluia exerciiului 7
Schema electro-pneumatic a sistemului
Schema electric a sistemului
B4 Controlul Sistemelor Industriale II
B4 - Pag 29
Variabile
Nume Atribut Tip Comentariu
Intrare0_0 [Intrare] BOOL Senzor de proximitate B1
Intrare0_1 [Intrare] BOOL Cilindrul 1A retras B2
Intrare0_2 [Intrare] BOOL Cilindrul 1A extins B3
Intrare0_3 [Intrare] BOOL Cilindrul 2A retras B4
Intrare0_4 [Intrare] BOOL Cilindrul 2A extins B5
Ieire0_0 [Ieire] BOOL Avans cilindru 1A Y1
Ieire0_1 [Ieire] BOOL Avans cilindru 2A Y2
Flag1 [Intern] BOOL Bit de stare 1
Flag2 [Intern] BOOL Bit de stare 2
Flag3 [Intern] BOOL Bit de stare 3
Flag4 [Intern] BOOL Bit de stare 4
Flag5 [Intern] BOOL Bit de stare 5
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 30
Diagrama secvenial a procesului
S001
Intrare0_0
R Ieire0_0
S002 S Ieire0_0
R Ieire0_1
Intrare0_2
S003 S Ieire0_1
Intrare0_4
S004 R Ieire0_0
Intrare0_1
S005 R Ieire0_1
Intrare0_3
B4 Controlul Sistemelor Industriale II
B4 - Pag 31
Diagrama Ladder
Intrare0_0 Flag5 Flag1
Flag1
Intrare0_2 Flag1 Flag2
Flag2
Intrare0_4 Flag2 Flag3
Flag3
Intrare0_3 Flag3
Flag4Intr
are0_0
Flag4Ieir
e0_0
Intrare0_1 Flag4 Flag5IN
Flag1Intrar
e0_2
Flag3CLK
Ieire0_0Q
Flag2TP_1 Flag4Intr
are0_0
Ieire0_1In
trare0_1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 32
Intrare0_1 Intrare0_3I
eire0_0
Flag1
Flag2
RS
SET1
Flag2
RESET
Q1
SR_1
Flag1 Intrare0_0R Flag2R_TRIG
Flag3CLK
RSCL
K
SET1Q
RESET
Q1
SR_2
Flag1 Flag2 Flag3
Flag4
RS
SET1
RESET
Q1
SR_3
Intrare0_2
Flag2 Flag3 Flag4
Flag5
RS
SET1
RESET
Q1
SR_4
Intrare0_4
Flag3 Flag4 Flag5
Flag1
RS
SET1
RESET
Q1
SR_5
Intrare0_1
B4 Controlul Sistemelor Industriale II
B4 - Pag 33
Flag2
Ieire0_0
Flag4
RS
SET1
RESET
Q1
SR_6
Flag3 Ieire0_1
Flag5
RS
SET1
RESET
Q1
SR_7
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B4 - Pag 34
B5 - Pag 1
Tehnologii Industriale
1. Aplicaia 1 Magazie gravitaional
2. Aplicaia 2 Band transportoare
3. Aplicaia 3 Sistem de sortare
4. Aplicaia 4 Dispozitiv de asamblare
Aplicaia 1 Magazie gravitaional
Definirea temei
Piesele dintr-o magazie gravitaional (Fig. 1.1) trebuie transferate la staia de procesare. Ele sunt
mpinse afar din magazie de cilindrul pneumatic 1A i transportate la staia de procesare de cilindrul 2A.
Ciclul de funcionare este prezentat n Fig. 1.2. Starea magaziei este monitorizat de un senzor. Poziia de
retragere a celor doi cilindri se realizeaz cu senzorii inductivi 1B1 i 2B2. Reluarea ciclului de face la
apsarea butonului START.
Fig.1.1. Staia de alimentare Fig.1.2. Diagrama de funcionare
B5
1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 2
Diagrama de funcionare
La apsarea butonului START, programul pornete, urmrind urmtorii pai:
Pasul 1 Motor 1A avans piesa este scoas afar din magazie.
Pasul 2 Motor 2A avans piesa este trimis ctre staia de procesare.
Pasul 3 Motor 1A retragere
Pasul 4 Motor 2A retragere
Pentru a relua ciclul este necesar apsarea din nou a butonului START.
Se cere:
1. Circuitul de acionare pentru procesul descris anterior;
2. Diagrama LDR de control al micrii.
3. Simularea i testarea sistemului proiectat
Sistemul de acionare
- Se propune circuitul din Fig. 1.3 compus din doi cilindri cu dubl aciune i dou distribuitoare 5/2).
Fig.1.3. Schema pneumatic de acionare
- Testarea circuitului de acionare propus: se realizeaz n mediul FluidSIM-Pneumatics
B5 Tehnologii Industriale
B5 - Pag 3
Diagrama LDR de control al micrii
- Scrierea listei de alocare: fiecrui operand absolut (resurse) i se va asocia un operand simbolic. Lista
operanzilor (alocare) este descris in Fig. 1.4.
Fig.1.4. Lista de alocare
- Implementarea diagramei LDR
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 4
Fig.1.5. Implementare LDR
n mediul Simatic - Step 7 se implementeaz diagrama din Fig. 1.5.
Testarea aplicaiei
Configuraie: PLC real sistem simulat (Fig. 1.6)
permite controlul unui proces simulat prin intermediul unui PLC real
Resurse hardware:
1. Interfe EasyPort - modul de intrri/ieiri realizeaz comunicarea dintre PLC i aplicatia virtual
2. PLC (se impune posibilitatea de conectare la interfata EasyPort prin conectori Centronix)
3.PC sistem de calcul necesar pentru implementarea aplicaiilor software: FluidSIM-Pneumatics
Resurse software:
1. Driver EzOPC: compatibilizeaz mediul de dezvoltare a aplicatiilor cu controlerul extern.
2. FluidSIM-Pneumatics
Etape configurare:
1. Se conecteaz PC-ul (cu COSIMIR PLC/ Fluid SIM) cu PLC-ul extern prin interfaa EasyPort.
- Cablul serial RS232 face legtura ntre portul serial PC i portul serial de la interfaa EasyPort.
- Conectorul cu semnale I/O pentru proces se conecteaz la PORT 1 al interfeei.
- Conectorul cu semnale I/O pentru control se conecteaz la PORT 2 al interfeei.
2. Se alimenteaz EasyPort-ul.
3. Se configureaz porturile EasyPort (EzOPC).
B5 Tehnologii Industriale
B5 - Pag 5
Fig.1.6. Modelul conexiunii
Fig. 7. Configurarea modulelor I/O
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 6
5. Se ncarc programul n PLC.
6. Se pornete simularea: ExecuteStart.
7. Se porneste PLC-ul (RUN)
8. Testare aplicaie (Fig. 1.8)
Prin intermediul soluiei propuse aplicaia poate fi testat pentru diverse situaii de lucru (Fig. 1.8).
Fig.1.8. Simularea/testarea aplicaiei n FluidSIM-Pneumatics
B5 Tehnologii Industriale
B5 - Pag 7
Aplicaia 2 Band transportoare
Definirea temei
Un sistem de ridicare transfer piesele de pe o band transportoare pe alta. Piesele sunt transferate
una cate una, cilindrul 3A fiind folosit ca si element de oprire a fluxului micrii. Cilindrul 1A ridic piesa la
nivelul dorit, apoi cilindrul 2A transfer piesa pe cealalt band transportoare. Cilindrii 1A i 2A au senzori
inductivi pentru a sesiza captul de curs a tijei, iar cilindrul 3A are numai un senzor, pistonul este acionat
ntr-un sens, revenirea fiind cu arc. Prezena piese pe lift este sesizat prin senzorul B5.
Fig.2.1. Staia de transfer Fig.2.2. Diagrama de funcionare
Diagrama de funcionare:
Pasul 1 Motor 3A: retragere senzorul B5 se activeaz.
Pasul 2 Motor 1A: avans senzorul 1B2 se activeaz
Pasul 3 Motor 3A: avans se ridic piesa
Pasul 4 Motor 2A: avans se transfer piesa senzorul 2B2 se activeaz.
Pasul 5 Motor 1A retragere senzorul 1B1 se activez
Motor 2A retragere senzorul 1B1.
Se cere:
1. Circuitul de acionare pentru procesul descris anterior;
2. Diagrama LDR de control al micrii;
3. Simularea i testarea sistemului proiectat.
2
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 8
Sistemul de acionare
- Se propune circuitul din Fig. 2.3 compus din trei cilindri, dou distribuitoare 5/3 i unul 3/2.
Fig.2.3. Schema de acionare pneumatic
- Testarea circuitului de acionare propus: se realizeaz n mediul FluidSIM-Pneumatics
Diagrama LDR de control al micrii
- Scrierea listei de alocare: fiecrui operand absolut (resurse) i se va asocia un operand simbolic. Lista
operanzilor (alocare) este descris in Fig. 2.4.
Fig.2.4. Lista de alocare
B5 Tehnologii Industriale
B5 - Pag 9
Fig.2.5. Structura aplicaiei de control
- Implementarea diagramei LDR
Fig.2.6. Blocul OB1
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 10
Fig.2.7. Blocul OB100
B5 Tehnologii Industriale
B5 - Pag 11
Fig.2.8. Blocul FB1
Fig.2.9. Blocul FC1
Simularea i testarea sistemului proiectat
Configuraie stand testare: PLC real sistem simulat
-permite controlul unui proces simulat prin intermediul unui PLC real
Resurse hardware:
1. Interfe EasyPort - modul de intrri/ieiri realizeaz comunicarea dintre PLC i aplicatia virtual
2. PLC (se impune posibilitatea de conectare la interfata EasyPort prin conectori Centronix)
3.PC sistem de calcul necesar pentru implementarea aplicaiilor software: FluidSIM-Pneumatics
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 12
Resurse software:
1. Driver EzOPC: compatibilizeaz mediul de dezvoltare a aplicatiilor cu controlerul extern.
2. FluidSIM-Pneumatics
Implementarea soluiei necesit etape indentice cu cele ale Aplicaiei 1.
Prin intermediul soluiei propuse aplicaia poate fi testat pentru diverse situaii de lucru.
Aplicaia 3 Sistem de sortare
Descrierea aplicaiei
Sistemul de manipulare i transport din Fig. 3.1 este alctuit din dou benzi transportoare A i B cu
aceeai direcie de deplasare, doi cilindrii hidraulici cu dubl aciune 1A i 2A pentru manipularea piesei i
un buton de comand (START). Piesa manipulat se de plaseaz pe banda A pn la platforma controlat de
cilindrul 1A. Piesa este ridicat i mpins de cilindrul 2A pe banda B, dup care ii continua deplasarea, iar
cei doi cilindri se retrag n poziia iniial.
Fig.3.1. Sistem de manipulare i sortare
3
B5 Tehnologii Industriale
B5 - Pag 13
Modelarea i simularea sistemului de sortare
Pentru modelarea i simularea aplicaiei se va utiliza tehnologia SIEMENS-FESTO, respectiv mediile
Simatic STEP7 i FluidSim H. Procesul va fi simulat n FluidSim H iar controlerul va fi unul real i va comunica
prin interfaa EasyPort cu procesul. O astfel de abordare (HIL hardware in the loop) este extrem de util n
studiul i proiectarea sistemelor, permind aducerea procesului industrial n laborator. Conceptul HIL este
exemplificat n documentul cu aplicaii B1.
Modelarea procesului n FluidSim H
n Fig. 3.2 este prezentat modelul procesului realizat n FluidSim H. S-au folosit urmtoarele notaii:
A1 actuator hidraulic cu dubl acionare (ridicarea pieselor)
A2 actuator hidraulic cu dubl acionare (transferul pieselor)
S1.1 senzor capt de curs pentru actuatorul A1 (retras)
S1.2 - senzor capt de curs pentru actuatorul A1 (avansat)
S2.1 senzor capt de curs pentru actuatorul A2 (retras)
S2.2 - senzor capt de curs pentru actuatorul A2 (avansat)
D1 distribuitor actuator A1
D2 distribuitor actuator A2
E1, E2 electromagneii distribuitorului ce acioneaz actuatorul A1
E3, E4 electromagneii distribuitorului ce acioneaz actuatorul A2
B1 Butonul START
Modelul este alctuit din circuitul hidraulic, circuitul electric i blocurile de intrri/ieiri destinate
transferului de informaie dintre procesul simulat i controlerul real. Butonul START este legat la portul 0 al
blocul FluidSIM Out iar semnalele senzorilor S1.1-S2.2 la porturile 1-4. Electromagneii E1-E4 ai
distribuitoarelor sunt conectai la porturile 0-4 ale blocul FluidSIM In. Comunicarea dintre proces i
controler se realizeaz prin intermediul driverului EzOPC, pus la dispoziie utilizatorilor de firma FESTO.
Astfel c:
1. Poziia iniial a sistemului este cea din Fig. 3.2.a.
2. La apsarea butonului START (B1) pistonul actuatorului A1 va avansa.
3. La captul cursei de avans a pistonului actuatorului A1 senzorul S1.2 va fi activ, iar pistonul
actuatorului A2 va primii comanda de avans (Fig. 3.2.b).
4. La captul cursei de avans a pistonului actuatorului A2 senzorul S2.2 va fi activ, iar pistonul
actuatorului A2 va primii comand de retragere n poziia iniial (Fig. 3.2.c).
5. La captul cursei de retragere a pistonului actuatorului A2 senzorul S2.1 va fi activ, iar pistonul
actuatorului A1 va primii comand de retragere (Fig. 3.2.d).
6. Sistemul se afl n poziia initial.
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 14
a) b)
c) d)
Fig.3.2. Modelul procesului realizat n FluidSim H
Programarea controlerului utiliznd Simatic STEP 7
Programarea PLC-ului se va face prin intermediul mediului Simatic STEP7. Programul a fost realizat
utiliznd diagrame Ladder. n figurile de mai jos se poate observa structura acestui program mpreun cu
lista de simboluri aferent.
B5 Tehnologii Industriale
B5 - Pag 15
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 16
B5 Tehnologii Industriale
B5 - Pag 17
Aplicaia 4 Dispozitiv de asamblare
Descierea aplicaiei
Dispozitivul de asamblare din Fig. 4.1 este folosit pentru presarea unei piese de plastic ntr-o pies
de metal i securizarea ei cu un urub. Pentru presarea piesei de plastic este folosit un actuator hidraulic de
mare presiune A1 cu dubl acionare, iar pentru inserarea urubului un motor hidraulic M2 rotativ. La
apsarea butonului START, actuatorul A1 preseaz piesa de plastic n piesa metalic. La atingerea presiunii
de 30bar n camera actuatorului A1, actuatorul A2 este activat. La apsarea butonului STOP actuatorul A2 se
oprete i actuatorul A1 se retrage n poziia iniial.
Fig.4.1. Dispozitiv de asamblare
4
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 18
Modelarea i simularea sistemului de sortare
Pentru modelarea i simularea aplicaiei se va utiliza tehnologia SIEMENS-FESTO, respectiv mediile
Simatic STEP7 i FluidSim H. Procesul va fi simulat n FluidSim H iar controlerul va fi unul real i va comunica
prin interfaa EasyPort cu procesul. O astfel de abordare (HIL hardware in the loop ) este extrem de util n
studiul i proiectarea sistemelor, permind aducerea procesului industrial n laborator. Conceptul HIL este
exemplificat n documentul cu aplicaii B1.
Modelarea procesului n FluidSim H
n Fig. 4.2 este prezentat modelul procesului realizat n FluidSim H. S-au folosit urmtoarele notaii:
A1 actuator hidraulic liniar cu dubl acionare
M2 actuator hidraulic rotativ
PS senzor de presiune
D1 distribuitor 4/3
D2 distribuitor 4/2
S1 - senzor capt de curs pentru actuatorul A1 (retras)
S2 - senzor capt de curs pentru actuatorul A1 (avansat)
E1, E2 electromagneii distribuitorului D1
E3 electromagnetul distribuitorului D2
B1 Butonul START
B2 butonul STOP
Modelul este alctuit din circuitul hidraulic, circuitul electric i blocurile de intrri/ieiri destinate
transferului de informaie dintre procesul simulat i controlerul real. Butonul START i STOP este legat la
portul 0, respectiv 1 al blocul FluidSIM Out iar semnalele senzorilor S1 i PS la porturile 2, respectiv 5.
Electromagneii E1-E3 ai distribuitoarelor sunt conectai la porturile 0-2 ale blocul FluidSIM In. Comunicarea
dintre proces i controler se realizeaz prin intermediul driverului EzOPC, pus la dispoziie utilizatorilor de
firma FESTO. Astfel c:
1. Poziia iniial a sistemului este cea din Fig. 4.2.a.
2. La apsarea butonului START, pistonul actuatorului A1 avanseaz.
3. Cnd presiunea ajunge la 3 MPa, se activeaz electromagnetul E3, iar motorul rotativ M2
execut procesul de fixare a celor dou componente.
4. La apsarea butonului STOP, motorul M2 se oprete.
5. Cnd motorul M2 este oprit i senorul S1 nu este activ (actuatorul A1 avansat), se activeaz
electromagnetul E2 (A1 se retrage).
6. Sistemul se afl n poziia iniial.
B5 Tehnologii Industriale
B5 - Pag 19
a)
b)
Fig.4.2. Modelul procesului realizat n FluidSim H
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 20
Programarea controlerului utiliznd Simatic STEP 7
Programarea PLC-ului se va face prin intermediul mediului Simatic STEP7. Programul a fost realizat
utiliznd diagrame Ladder. n figurile de mai jos se poate observa structura acestui program mpreun cu
lista de simboluri aferent. Programul este structurat n dou blocuri organizaionale OB1 i OB100, un bloc
funcie FB i un bloc funcie FC.Blocul OB1 conine dou ramuri, o ramur de iniializare i a una pentru
activarea funciei FB1. Funcia poate rula doar daca iniializarea s-a efectuat cu succes.
B5 Tehnologii Industriale
B5 - Pag 21
nainte de rularea blocului OB1 se execut blocul OB100, acesta avnd o prioritatea mai mare.
Blocul iniializeaz zona de memorie M40.2 (1 logic) i reseteaz zona de memorie M1.0 (0 logic).
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 22
Funcia FC1 conine o ramur ce reseteaz flag-ul de iniializare (0 logic) i seteaz zona de memorie
M1.0 (1 logic).
B5 Tehnologii Industriale
B5 - Pag 23
Funcia bloc FB1 conine programul principal al aplicaiei. Dac butonul START este apsat i
senzorul S1 este activ (actuatorul A1 este retras), electromagnetul E1 va fi activat (1 logic) i E2 dezactivat (0
logic).
Cnd presiunea ajunge la 3MPa, se activeaz senzorul de presiune PS setat pe bitul de intrare I0.5.
Bitul de ieire Q0.2 va lua valoare 1 logic (ncepe micarea de rotaie a motorului M2). De asemenea S1
nu trebuie s fie activ.
La apsarea butonului STOP bitul de ieire Q0.0 va lua valoarea 0 logic, iar bitul de ieire Q0.1 va
lua valoarea 1 logic (pistonul actuatorului A1 se va retrage, senzorul de presiune PS nu va mai fi activ, iar
motorul rotativ M2 se va opri).
Modulul 3. Mecatronic II - Dezvoltare tehnologic i tehnologii educaionale n societatea bazat pe cunoatere
B5 - Pag 24
Bibliografie
1. Andrew, Parr Hydraulics and Pneumatics, Second Edition, Butterworth-Heinemann, 1999, ISBN
9780750644198, 244 pag.
2. Bliesener, R., Ebel, F., Lffler, C., Plagemann, B., Regber, H., Terzi, E., Winter, A., Programmable
Logic Controllers , TP301, FESTO;
3. Conde, R., Statement List Programming, FESTO, 1997;
4. Dumitriu, A. - Mecatronic, volumul 1, Editura Universitii Ttransilvania din Braov, 2006, ISBN
973-635-429-6, 320 pag.
5. Gerhard Schmidt - GRAFCET, Festo Didactic GmbH & Co. KG, 73770 Denkendorf, Germany, 2007,
Internet: www.festo-didactic.com
6. H., Berger Automating with STEP 7 in STL and SCL: SIMATIC S7-300/400 Programmable
Controllers, 1
st
edition , Wiley-VCH, 2009, 3895783412, 544 pag.
7. Hugh., J., Automating Manufacturing Systems with PLCs, 2008.
8. IEC 60848
9. Mtie V., Blan R., Hancu O., Gliga A., Hidronica-Aplicaii, Editura Todesco, 2003.
10. M., Rabie Fluid Power Engineering, 1
st
edition, McGraw-Hill Professional, 2009, ISBN 0071622462,
448 pag.
11. Parr, E., A., Programmable Controllers - An engineers guide, Newnes (Elsevier) , 2003.
12. Popescu, D., Automate programabile - Construcie, funcionare i aplicaii, Ed. Matrix, Bucureti,
2005;
13. Programmable Logic Controller, Fundamentals and Applications of Programmable Logic Controllers,
Exercises and Solutions, FESTO.
14. Robert, H., Bishop The Mechatronics Handbook, Second Edition 2 Volume Set, CRC Press, 2007,
ISBN 9780849392573, 1416 pag.
15. S7-GRAPH V5.3 for S7-300/400 Programming Sequential Control Systems
S-ar putea să vă placă și
- Simboluri HidrauliceDocument15 paginiSimboluri HidrauliceBassu Razvan89% (9)
- Generatii de CalculatoareDocument3 paginiGeneratii de CalculatoareLukarys73% (11)
- Indrumar Frezor ImpDocument31 paginiIndrumar Frezor ImpRadu Vasile100% (1)
- Masini Si Actionari ElectriceDocument161 paginiMasini Si Actionari ElectriceLaurentiu Ilea100% (6)
- Microsoft Access 2003 - CursDocument50 paginiMicrosoft Access 2003 - Cursralucutza13100% (1)
- Microsoft Access 2003 - CursDocument50 paginiMicrosoft Access 2003 - Cursralucutza13100% (1)
- CNC Introducere 1Document6 paginiCNC Introducere 1ovidiu2009Încă nu există evaluări
- Istoria Calculatorului - ReferatDocument7 paginiIstoria Calculatorului - ReferatElena Morhan75% (4)
- Sisteme Mecatronice. Comanda-Programare. Curs PDFDocument23 paginiSisteme Mecatronice. Comanda-Programare. Curs PDFDragos Simona100% (2)
- Freza CNCDocument89 paginiFreza CNCPintea Alexandru CalinÎncă nu există evaluări
- Traductoare de Pozitie Si DeplasareDocument30 paginiTraductoare de Pozitie Si DeplasareP_adelin6274Încă nu există evaluări
- Structura CNCDocument19 paginiStructura CNCdelld600Încă nu există evaluări
- Evolutia Sistemelor MecatroniceDocument35 paginiEvolutia Sistemelor MecatroniceAndra S AndraÎncă nu există evaluări
- Istoria CalculatoarelorDocument3 paginiIstoria CalculatoarelorLivioara Ionela StefanÎncă nu există evaluări
- Masini Unelte Echipate Cu CNCDocument87 paginiMasini Unelte Echipate Cu CNCGabi Onofrei100% (2)
- Utilizarea Roboţilor IndustrialiDocument21 paginiUtilizarea Roboţilor IndustrialiBuicăAndreiÎncă nu există evaluări
- Freza CNC PDFDocument89 paginiFreza CNC PDFOcazii100% (3)
- Roboti Industriali PrezentareDocument14 paginiRoboti Industriali PrezentareBignaturalÎncă nu există evaluări
- 03 - Circuite Logice Integrate in AutomatizariDocument45 pagini03 - Circuite Logice Integrate in Automatizaribogdy06Încă nu există evaluări
- MecatronicaDocument29 paginiMecatronicamoak85Încă nu există evaluări
- Curs Tot BSM VDocument116 paginiCurs Tot BSM VMădălina ȘuhaniÎncă nu există evaluări
- Prelucrari Pe MUCN 1Document66 paginiPrelucrari Pe MUCN 1Cherciu Marius100% (6)
- Generatii de CalculatoareDocument14 paginiGeneratii de Calculatoarecristine-110% (1)
- Istoria Masinilor de CalculDocument22 paginiIstoria Masinilor de CalculMihai RăduțÎncă nu există evaluări
- Elaborarea Schemei Electrice Si Pneumatice in Mediul de Simulare FluidSIMDocument31 paginiElaborarea Schemei Electrice Si Pneumatice in Mediul de Simulare FluidSIMColegiul Tehnic Costin NenitescuÎncă nu există evaluări
- Acţionari Electrice in MecatronicaDocument22 paginiAcţionari Electrice in MecatronicaSebseb44Încă nu există evaluări
- ProiectDocument29 paginiProiectTerrance TorresÎncă nu există evaluări
- Retele Pentru Comunicatii IndustrialeDocument74 paginiRetele Pentru Comunicatii IndustrialeP_adelin6274Încă nu există evaluări
- Capitol1m UDocument14 paginiCapitol1m ULukacs HunorÎncă nu există evaluări
- A4 Controlul Sistemelor Industriale II ADocument253 paginiA4 Controlul Sistemelor Industriale II ACarla CarlaÎncă nu există evaluări
- Istoria Masinilor de CalculDocument2 paginiIstoria Masinilor de CalculvickyÎncă nu există evaluări
- Istoria Sistemelor de Calcul - Kostov Lavinia, AMG 1, Grupa 1Document2 paginiIstoria Sistemelor de Calcul - Kostov Lavinia, AMG 1, Grupa 1Lavinia KostovÎncă nu există evaluări
- Structura Unei Masini Cu Comenzi NumericeDocument29 paginiStructura Unei Masini Cu Comenzi NumericeLore ElenaÎncă nu există evaluări
- Capitolul 1 M-UDocument12 paginiCapitolul 1 M-UMihai SimonÎncă nu există evaluări
- Evolutia CalculatoarelorDocument19 paginiEvolutia CalculatoarelorRusănescu Răzvan100% (1)
- Proiect EPSDocument17 paginiProiect EPSNedelea MihaiÎncă nu există evaluări
- Istoria CalculatoarelorDocument22 paginiIstoria CalculatoarelorEugen BaronuÎncă nu există evaluări
- Istoria Mașinilor de CalculDocument22 paginiIstoria Mașinilor de CalculMarina CiribasÎncă nu există evaluări
- Istoria CalculatoarelorDocument2 paginiIstoria CalculatoarelorAndrei PistaÎncă nu există evaluări
- Ciclul de Viata Al CalculatoarelorDocument27 paginiCiclul de Viata Al CalculatoarelorStegarescu SorinÎncă nu există evaluări
- WWW - Referat.ro Calculatorul Electronic - Docdc4b7Document5 paginiWWW - Referat.ro Calculatorul Electronic - Docdc4b7Herghelegiu MihaelaÎncă nu există evaluări
- Informatica ReferatDocument10 paginiInformatica ReferatSimion AvramÎncă nu există evaluări
- Evoluţia Sistemelor de CalculDocument2 paginiEvoluţia Sistemelor de CalculCristina DenisaÎncă nu există evaluări
- Prepozitia Exercitii PDFDocument92 paginiPrepozitia Exercitii PDFAndreea DinuÎncă nu există evaluări
- Lucrarea 1Document12 paginiLucrarea 1Alex BrcÎncă nu există evaluări
- C 1 2aDocument11 paginiC 1 2aalinutza_doltenitzaÎncă nu există evaluări
- Istoria CalculatoruluiDocument4 paginiIstoria CalculatoruluiMihaela CostacheÎncă nu există evaluări
- Istoria CalculatoarelorDocument20 paginiIstoria CalculatoarelorEugen BaronuÎncă nu există evaluări
- Gradinaru Constant inDocument29 paginiGradinaru Constant inprodan_costelÎncă nu există evaluări
- Arhitectura PC OriginalDocument9 paginiArhitectura PC OriginalAvelin PanaitÎncă nu există evaluări
- BIE Curs 9Document22 paginiBIE Curs 9Diana PsychoÎncă nu există evaluări
- 2.2.tipuri de Sisteme de Calcul Si de ComunicatiiDocument12 pagini2.2.tipuri de Sisteme de Calcul Si de ComunicatiinicoletadanciÎncă nu există evaluări
- Curs01 IntroducereDocument35 paginiCurs01 IntroduceremalesstefanmarianÎncă nu există evaluări
- Generatia de CalculatoareDocument7 paginiGeneratia de CalculatoareDinu FreiÎncă nu există evaluări
- WWW - Referat.ro-Istoria Si Dezvoltarea CalculatoarelorDocument19 paginiWWW - Referat.ro-Istoria Si Dezvoltarea CalculatoarelorVitalieCorpaceanÎncă nu există evaluări
- Bti L01Document39 paginiBti L01Ana Maria AlexandruÎncă nu există evaluări
- Programarea VBA 2013Document78 paginiProgramarea VBA 2013P_adelin6274Încă nu există evaluări
- ModuluProgramare in AcceslDocument81 paginiModuluProgramare in AcceslP_adelin6274Încă nu există evaluări
- Mediul Acces 2003Document76 paginiMediul Acces 2003P_adelin6274Încă nu există evaluări
- Fx1s, Fx1n, Fx2n, Fx3g, Fx3u - Manual Introductiv 209122-d (07.09) - RoDocument0 paginiFx1s, Fx1n, Fx2n, Fx3g, Fx3u - Manual Introductiv 209122-d (07.09) - RoP_adelin6274Încă nu există evaluări
- 2 RotaruCG FlorescuIC Modbus ProfibusDocument20 pagini2 RotaruCG FlorescuIC Modbus ProfibusP_adelin6274Încă nu există evaluări
- Traductoare de Pozitie Si DeplasareDocument2 paginiTraductoare de Pozitie Si DeplasareP_adelin6274Încă nu există evaluări
- Masina de Cusut Brother LS2125 Manual de UtilizareDocument56 paginiMasina de Cusut Brother LS2125 Manual de Utilizare4Ranahita100% (1)
- 13 - Copierea Formulelor Şi RecalculareaDocument3 pagini13 - Copierea Formulelor Şi Recalculareaflavyus18Încă nu există evaluări
- CAN - Vlad AndreiDocument23 paginiCAN - Vlad AndreiP_adelin6274Încă nu există evaluări
- Modulul XI - Mirela Popa IDocument62 paginiModulul XI - Mirela Popa IcazacvaleraÎncă nu există evaluări
- Masina de Cusut Brother LS2125 Manual de UtilizareDocument56 paginiMasina de Cusut Brother LS2125 Manual de Utilizare4Ranahita100% (1)
- CURS Microsoft AccessDocument42 paginiCURS Microsoft AccessLaurentiumanolache100% (1)
- C I 2 C S 6Document23 paginiC I 2 C S 6P_adelin6274Încă nu există evaluări
- 2.vba SC4Document208 pagini2.vba SC4P_adelin6274Încă nu există evaluări
- ModuluProgramare in AcceslDocument81 paginiModuluProgramare in AcceslP_adelin6274Încă nu există evaluări
- CURS Microsoft AccessDocument42 paginiCURS Microsoft AccessLaurentiumanolache100% (1)
- Curs Infoind 8Document29 paginiCurs Infoind 8P_adelin6274Încă nu există evaluări
- FR D700, FR E700, FR F700, FR A700 Ghid Introductiv 209074 B (06.09) - RoDocument0 paginiFR D700, FR E700, FR F700, FR A700 Ghid Introductiv 209074 B (06.09) - RoP_adelin6274Încă nu există evaluări
- CURS Microsoft AccessDocument42 paginiCURS Microsoft AccessLaurentiumanolache100% (1)
- 1.BD A2Document208 pagini1.BD A2P_adelin6274Încă nu există evaluări
- Calculul Sectiunii ConductoarelorDocument8 paginiCalculul Sectiunii ConductoarelorIonut BalaibanÎncă nu există evaluări
- Fx1s, Fx1n, Fx2n, Fx3g, Fx3u - Manual Introductiv 209122-d (07.09) - RoDocument0 paginiFx1s, Fx1n, Fx2n, Fx3g, Fx3u - Manual Introductiv 209122-d (07.09) - RoP_adelin6274Încă nu există evaluări