S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- How To Add and Remove References Using CATVBA - VB Scripting For CATIA V5Document7 paginiHow To Add and Remove References Using CATVBA - VB Scripting For CATIA V5JosephRomeraloÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Photamate Pro - PhotamateDocument6 paginiPhotamate Pro - PhotamateJosephRomeraloÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- How To - Convert An Object To Another Type in Visual Basic - Microsoft DocsDocument3 paginiHow To - Convert An Object To Another Type in Visual Basic - Microsoft DocsJosephRomeraloÎncă nu există evaluări
- The Best Tutorial For Making An RC PlaneDocument8 paginiThe Best Tutorial For Making An RC PlaneJosephRomeraloÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- How To Create A Medieval Movie Poster in Photoshop - Photoshop Tutorials PDFDocument89 paginiHow To Create A Medieval Movie Poster in Photoshop - Photoshop Tutorials PDFJosephRomeraloÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- EDU CAT EN VBA AX V5R19 Toprint PDFDocument87 paginiEDU CAT EN VBA AX V5R19 Toprint PDFJosephRomeraloÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- F4U CoveringDocument2 paginiF4U CoveringJosephRomeraloÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Passing Access - Application Object To A Function: Dim, Set, Object How To Make It Work?Document4 paginiPassing Access - Application Object To A Function: Dim, Set, Object How To Make It Work?JosephRomeraloÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
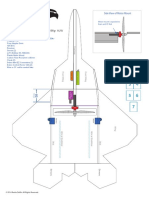
- F-22 Plans 15wsDocument4 paginiF-22 Plans 15wsJosephRomeraloÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- F-22 Plans 22wsDocument8 paginiF-22 Plans 22wsJosephRomeraloÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- EPM212 - Chapter 9 Slides GD T HandoutDocument15 paginiEPM212 - Chapter 9 Slides GD T HandoutJosephRomeraloÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- GD&TDocument74 paginiGD&Tgary311098Încă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- 19 Halloween Crafts For KidsDocument36 pagini19 Halloween Crafts For KidsJosephRomeralo100% (2)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- URA - Workers DormitoryDocument2 paginiURA - Workers DormitoryJimmy TanÎncă nu există evaluări
- Ha466461u004 PDFDocument513 paginiHa466461u004 PDFagus sutrisnoÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- INNOVA OBD2 Scanner-Manual 3030g EDocument60 paginiINNOVA OBD2 Scanner-Manual 3030g EgoogleheadÎncă nu există evaluări
- R12 XML Payment Templates and FormatsDocument4 paginiR12 XML Payment Templates and FormatsfazeelahmedÎncă nu există evaluări
- Godiva KP Fire PumpDocument2 paginiGodiva KP Fire Pump69x4100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- H500 SA2500 Spectrum Analyzer Datasheet 1Document12 paginiH500 SA2500 Spectrum Analyzer Datasheet 1pott_81Încă nu există evaluări
- Moment Resisting Frames - Part2Document70 paginiMoment Resisting Frames - Part2peterpaulw100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Especificaciones de Bateria de 170 AH CD TRUE 12 - 1075 - 0512Document2 paginiEspecificaciones de Bateria de 170 AH CD TRUE 12 - 1075 - 0512LUIS MANUEL MEDINA TORRESÎncă nu există evaluări
- VLAN Ip SubnetDocument3 paginiVLAN Ip SubnetVane Duarte GonzalezÎncă nu există evaluări
- Compound Wall Tender (Kadapa)Document90 paginiCompound Wall Tender (Kadapa)div_misÎncă nu există evaluări
- MZ15313U Product OverViewDocument4 paginiMZ15313U Product OverViewsp.marianÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hempadur Zinc 17360Document2 paginiHempadur Zinc 17360Krishna Vacha100% (1)
- Sch. SAE 3000 PsiDocument19 paginiSch. SAE 3000 PsiWilson JustinoÎncă nu există evaluări
- Trimline UT20006Document22 paginiTrimline UT20006ashumovÎncă nu există evaluări
- Chapter 1 NotesDocument3 paginiChapter 1 Noteshero_spaceboy3600Încă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- ComPact NS - 33478Document3 paginiComPact NS - 33478dwi putikÎncă nu există evaluări
- Tubetools CatalogDocument105 paginiTubetools Catalogcun100% (1)
- Engine Expert ManualDocument37 paginiEngine Expert ManualEktidustu CheleÎncă nu există evaluări
- 1SBH901074R7522 Nx22e 75 200v50hz 200 220v60hzDocument3 pagini1SBH901074R7522 Nx22e 75 200v50hz 200 220v60hzthiago_gomes7953Încă nu există evaluări
- 3com S2900-CMW520-R1101P09 Usage GuidelinesDocument11 pagini3com S2900-CMW520-R1101P09 Usage GuidelinesMichael AdornoÎncă nu există evaluări
- M4 - Lesson 5 - Quality by DesignDocument2 paginiM4 - Lesson 5 - Quality by DesignWilliam DC RiveraÎncă nu există evaluări
- Abb ManualDocument20 paginiAbb ManualHamilton Velandia GalloÎncă nu există evaluări
- Security Evaluation of SCTP: Bachelor ThesisDocument61 paginiSecurity Evaluation of SCTP: Bachelor ThesisGábor NémethÎncă nu există evaluări
- Serial Port Communication in C#Document13 paginiSerial Port Communication in C#Cata CatacataÎncă nu există evaluări
- 14120712586901Document20 pagini14120712586901Mauricio Manchego100% (1)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Laundry Engineering and Planning HandbookDocument343 paginiLaundry Engineering and Planning HandbookKhanh mai quocÎncă nu există evaluări
- Oracle9: Program With PL/SQL: Student Guide - Volume 1Document14 paginiOracle9: Program With PL/SQL: Student Guide - Volume 1vineetÎncă nu există evaluări
- 0 Item(s) : Country Level Duration No. Questions Cut Score Product Group Solution Available LanguagesDocument3 pagini0 Item(s) : Country Level Duration No. Questions Cut Score Product Group Solution Available LanguageserczzoneÎncă nu există evaluări
- 640 911Document96 pagini640 911ivailo770% (1)
- Edwards Signaling E-FSA250R Data SheetDocument8 paginiEdwards Signaling E-FSA250R Data SheetJMAC SupplyÎncă nu există evaluări