Documente Academic
Documente Profesional
Documente Cultură
Rapport de Stage Pfe - GPL
Încărcat de
Mednini PurTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Rapport de Stage Pfe - GPL
Încărcat de
Mednini PurDrepturi de autor:
Formate disponibile
i
BELAZRAG MOHAMED
Ddicace
Je ddie ce travail
A mon pre
A ma mre
A mes frres et mes surs
A mes chers amis
A tous ceux que jaime et qui maiment
ii
A mon binme Mohamed
A tous mes enseignants tous les techniciens et les
oprateurs.
Lattrach HAMZA
Remerciements
Il nous parait maintenant que ce modeste travail est achev.
Peu de mots peuvent traduire notre profonde gratitude envers toutes les
personnes qui nous ont aids la ralisation de ce travail STEG usine GPL de
Gabes.
Nous tenons exprimer nos profondes gratitudes et nos immenses respects nos
encadrant Mme Jabri Sana de lusine GPL et Mme Rafika Elharabi linstitut
Suprieur de Systme Industriels du Gabes pour leur qualit de son encadrement,
ses disponibilits, ses hautes qualits morales et scientifiques et ses
encouragements continus durant lexcution de notre projet afin de le bien
raliser.
iii
Egalement nous tenons exprimer notre profonde gratitude aux membres des
jurys qui acceptent de juger notre travail.
Aussi, lissue de trois ans agrables, nous adressons nos remerciements toute
lquipe denseignantes pour la qualit de lenseignement qui nous a t fourni et
la direction de linstitut pour leur effort continu favoriser les bons conditions
de travail aux tudiants.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 4
Sommaire
Liste des figures........................................................................................................................................7
Liste dabrviations ..................................................................................................................................9
INTRODUCTION GENERALE ............................................................................................................10
Chapitre 1 : Prsentation de lusine GPL et tude du systme pompage ...............................................12
1. Introduction ....................................................................................................................................12
2. Prsentation de lusine ....................................................................................................................12
2.1. Prsentation gnrale de la STEG ......................................................................................... 12
2.2. Prsentation gnrale de lusine GPL .................................................................................... 12
2.3. Principe de fonctionnement de lusine GPL .......................................................................... 13
3. Prsentation de systme tudie .....................................................................................................14
3.1. Description et fonctionnement global ................................................................................... 14
3.2. Equipements .......................................................................................................................... 15
3.2.1. Rservoirs et raccordement du pressostat .......................................................................... 15
3.2.2. Pompe ................................................................................................................................ 17
3.2.3. Moteur lectrique............................................................................................................... 18
3.2.4. Contrleur .......................................................................................................................... 19
3.2.5. Autres composants............................................................................................................. 20
4. Problme et solution .......................................................................................................................22
4.1. Avantages .............................................................................................................................. 22
4.2. Inconvnients de contrleur MPA 6000 ................................................................................ 22
4.3. Solutions ................................................................................................................................ 23
4.4. Cahier de charge .................................................................................................................... 23
5. Conclusion ......................................................................................................................................23
Chapitre 2 : Commande de la pompe base de lautomate S7 300 .......................................................24
1. Introduction ....................................................................................................................................24
2. Commandes de la pompe................................................................................................................24
2.1. Commande manuelle : ........................................................................................................... 24
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 5
2.2. Commande automatique ........................................................................................................ 24
2.3. Autres commandes ................................................................................................................ 25
3. Gnralits sur les automates programmables industriels ..............................................................25
3.1. Dfinition............................................................................................................................... 25
3.2. Architecture des automates.................................................................................................... 25
3.2.1. Aspect extrieur ................................................................................................................. 25
3.2.2. Principe de fonctionnement ............................................................................................... 26
3.2.3. Caractristiques techniques ............................................................................................... 26
3.2.4. Unit centrale .................................................................................................................... 26
3.2.5. Mmoire ............................................................................................................................ 27
3.3. Objectifs de lautomatisation ................................................................................................. 27
3.3.1. De point de vue financement ............................................................................................. 27
3.3.2. Amliorer la scurit et la disponibilit ............................................................................. 27
3.4. Critres de choix dun API .................................................................................................... 27
4. Prsentation de lAPI Siemens S7-300 utilis ................................................................................28
4.1. Etude de la partie matrielle .................................................................................................. 28
4.1.1. Unit centrale CPU 314 ..................................................................................................... 29
4.1.2. Alimentation PS 307.......................................................................................................... 29
4.1.3. Modules dentre/sortie (E/S) ............................................................................................ 30
4.1.4. Rack ................................................................................................................................... 33
4.2. Etude de la partie logicielle (SOFTWARE) .......................................................................... 33
4.2.1. Etude de programmation (langage ladder) ........................................................................ 34
4.2.2. Illustration dun rseau contacts ..................................................................................... 37
4.3. Transfert du programme ........................................................................................................ 38
5. Conclusion ......................................................................................................................................38
Chapitre 3 : Automatisation et simulation ..............................................................................................39
1. Introduction ....................................................................................................................................39
2. Grafcet de fonctionnement du contrleur .......................................................................................39
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 6
2.1. Mode manuel ......................................................................................................................... 39
2.2. Mode automatique ................................................................................................................. 40
2.3. Mode test ............................................................................................................................... 40
2.4. Grafcet globale ...................................................................................................................... 41
Dans notre solution, nous avons deux grafcet de fonctionnement .................................................... 41
Grafcet de dmarrage ........................................................................................................................ 41
3. Programmation de lautomate ........................................................................................................43
3.1. Configuration de lautomate .................................................................................................. 44
3.2. Cration du projet dans SIMATIC Manager ......................................................................... 45
3.3. Configuration de matriel (Partie Hardware) ........................................................................ 47
3.4. Cration des mnmoniques.................................................................................................... 50
3.5. Elaboration du programme S7 (Partie Software) .................................................................. 51
4. Simulateur des programmes PLCSIM ............................................................................................52
5. Excution de la partie pratique .......................................................................................................53
5.1. Cblage de lautomate ........................................................................................................... 53
5.2. Cblage des diffrents quipements ...................................................................................... 54
6. Conclusion ......................................................................................................................................55
Enfin, on a donn une ide sur la partie pratique o les cblages de lautomate. ..................................55
CONCLUSION GENERALE ................................................................................................................56
Rfrences bibliographiques ..................................................................................................................57
ANNEXES .............................................................................................................................................58
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 7
Liste des figures
Figure 1.1: Usine GPL ............................................................................................................. 13
Figure 1.2 : Plan de lusine GPL .............................................................................................. 14
Figure 1.3 : Schmatisation du system tudie .......................................................................... 15
Figure 1.4 : Bac deau .............................................................................................................. 16
Figure 1.5: Montage de raccordement du pressostat une pompe dincendie......................... 16
Figure 1.6 : pompe dincendie .................................................................................................. 17
Figure 1.7: Croquis dun ancrage de socle typique .................................................................. 18
Figure 1.8: contrleur ............................................................................................................... 19
Figure 1.9: Sprinkler ................................................................................................................ 21
Figure 1.10 : Poteau dincendie ................................................................................................ 22
Figure 1.11 : RIA ..................................................................................................................... 22
Figure 2.1 : Automate Siemens S7-300 ................................................................................... 28
Figure 2.2 : Elments principaux de la tension d'alimentation et de la CPU .......................... 29
Figure 2.3 : Schma de branchement des PS 307; 5 A ............................................................ 30
Figure 2.4: Schma de branchement et de principe du SM 321 ; DI 16 x UC 24/48 V ........... 31
Figure 2.5 : Schma de branchement et de principe................................................................. 32
Figure 2.6: Schma de branchement et de principe du module SM 322 ; DO 32 x 24 V cc/0,5
A ............................................................................................................................................... 33
Figure 2.7: Fentre du logiciel SIMATIC STEP7 V5.5 ........................................................... 34
Figure 2.8: prsentation des E/S ............................................................................................... 35
Figure 2.9 : Interface de programmation ................................................................................. 37
Figure 2.10: tapes de programmation dun API .................................................................... 38
Figure 3.1 : Automate Programmable Industriel SIEMENS ................................................... 44
Figure 3.2: cration de projet .................................................................................................. 45
Figure 3.3: titre de projet .......................................................................................................... 46
Figure 3.4: insertion dun nouvel objet station SIMATIC 300 .......................................... 46
Figure 3.5: choix du RAK ........................................................................................................ 47
Figure 3.6 : choix du CPU et dalimentation ........................................................................... 48
Figure 3.7: choix des embases dE/S ....................................................................................... 49
Figure 3.8: Hirarchie du programme STEP7 .......................................................................... 49
Figure 3.9: Cration des mnmoniques .................................................................................... 50
Figure 3.10 : Table des mnmoniques du projet ...................................................................... 50
Figure 3.11: cration du bloc dorganisation .......................................................................... 51
Figure 3.12: choix du langage CONT ...................................................................................... 52
Figure 3.13: Interface de simulation PLCSIM ......................................................................... 53
Figure 3.14 : cblages de lautomate ........................................................................................ 54
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 8
Liste des Tableaux
Tableau 1.1 : Caractristiques techniques de la pompe ......................................................................... 18
Tableau 1.2: Caractristiques techniques du moteur lectrique ............................................................ 19
Tableau 1.3 : Caractristiques techniques de contrleur ....................................................................... 20
Tableau 1.4 : Tableau rcapitulatif des tempratures de dclenchement en fonction de la couleur de
lampoule ............................................................................................................................................... 21
Tableau 2.1: type de variable................................................................................................................. 36
Tableau 2.2: Exemples des symboles .................................................................................................... 36
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 9
Liste dabrviations
SNDP : Socit Nationale de Distribution des Ptroles
BGT : Socit British Gaz Tunisie
SUD GAZ : entreprise de distribution de gaz naturel
TM : Tonnes Mtriques = Tonnes
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 10
INTRODUCTION GENERALE
Contexte du projet
Lautomatisation dun processus industriel ou dune chane industrielle consiste assurer le
fonctionnement par un systme technologique. Ce systme doit tre capable de prendre en
compte les rsultats en provenance des capteurs et les ventuelles consignes donnes par un
oprateur et le fournir en retour au processeur des commandes et des informations
loperateur. Ainsi, elle reprsente un facteur essentiel de la productivit et elle est un lment
important de lamlioration de la qualit en utilisant des automates programmables
industrielles.
Dans ce contexte, la scurit et la suret de fonctionnement sont des tches dune grande
importance en particulier dans lUsine Gaz Ptrole Liqufie (GPL) a cause de nature de
matire primaire et les produits finis qui sont trs inflammables, pour cela la GPL fait une
stratgie de scurit : est avant tout de prvenir les fuites de GPL. Si elle a lieu, il sagit de la
limiter au plus vite et de limiter les sources dinflammation. Si la fuite senflamme, il sagit de
circonscrire au plus vite lincendie pour viter le phnomne de BLEVE alors la prsence
dun groupe de pompage deau incendie dans lusine travers dun rseau de tuyauterie.
Alors une stratgie dautomatisation base des API est demande par responsables
instrumentation et automatisme de lUsine Gaz Ptrole Liqufie (GPL) de Gabs pour
assurer le bon fonctionnement de systme pompage deau incendie.
Objectifs du projet
Notre Projet Fin dEtudes porte sur ltude et la conception dun contrleur de commande
de fonctionnement dune pompe incendie lectrique base dun Automate Siemens S7-300.
Organisation du rapport
Dans le premier chapitre, une prsentation gnrale de lusine GPL sera donne. Puis, une
description du principe de fonctionnement du systme du pompage sera aborde en mettant
laccent sur les problmes rencontrs et en proposant une solution convenable.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 11
Dans le deuxime chapitre, on prsentera les diffrents modes de commande de la pompe. Par
la suite, une ide gnrale sur le principe et larchitecture de lAPI sera introduite. Enfin, on
sintressera ltude de lautomate S7-300 de point de vue matriel et logiciel.
Dans le dernier chapitre, un programme dautomatisation de contrleur du systme de
pompage sera dvelopp sous le logiciel SIMATIC Manger en prcisant les diffrentes
schmas de contact. Un test de simulation sera prsent. Ce programme sera valid par un
simulateur disponible lusine GPL.
Enfin, une conclusion et des perspectives seront donnes.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 12
Chapitre 1 : Prsentation de lusine GPL et tude du
systme pompage
1. Introduction
Dans ce chapitre, une prsentation de lusine GPL est donne ainsi que la description de
diffrents composants du systme de pompage. Puis, on posera les problmes rencontrs et la
solution adquate.
2. Prsentation de lusine
2.1. Prsentation gnrale de la STEG
La socit tunisienne de llectricit et du gaz (STEG) est une socit de droit public
caractre non administratif. Cre en 1962, la STEG a pour missions essentielles:
llectrification du pays ;
le dveloppement du rseau Gaz naturel ;
la ralisation dune infrastructure pour le rseau dlectricit et du gaz.
La STEG est responsable de la production de llectricit et du GPL ainsi que du transport et
de la distribution de llectricit et du gaz naturel.
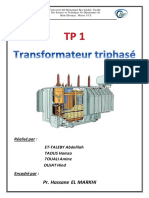
2.2. Prsentation gnrale de lusine GPL
Lusine de Gaz Ptrole Liqufi, figure1.1 assure le traitement du gaz et du condensat
provenant de la station dEI Borma travers les pipe-lines et la commercialisation des
produits finis savoir:
Gaz de ville (mthane+ thane) ;
Propane, butane, gazoline (essence lgre cosmtique ) ;
Buta-pro (mlange de butane et propane). Ces produits sont usage domestique,
tertiaire et/ou industriel (SNDP, BGT, SUD GAZ).
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 13
Lusine est situe dans la zone industrielle de Gabes. Elle tait cre en 1987 et elle tait
renouvelait en 2008. Elle produit ;
438 millions de Nm3/an du gaz commercial (Ethane C1 et Mthane C2) ;
60.225 TM /an du Propane ;
45.625 TM/an du Gazoline ;
54.750 TM/an du Butane ;
Figure 01.1: Usine GPL
2.3. Principe de fonctionnement de lusine GPL
La station dextraction dEI Borma envoi un mlange gazeux, travers des pipe-lines, jusqu
la ville de gabes 350 km. A lentre de lusine GPL, on dispose de deux entres: gaz et
condensats.
Lusine GPL se constitue essentiellement, figure 1.2 :
Dune unit de fractionnement.
Des units dutilits (air instrument, rseau lectrique, rseau eau incendie, rseau
huile chaude etc.).
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 14
Dun parc de stockage.
Dune unit de chargement et dchargement des produits situe au port de Gabs [1].
Figure 01.2 : Plan de lusine GPL
3. Prsentation de systme tudie
3.1. Description et fonctionnement global
Notre systme est un groupe de pompage deau incendie, figure 1.3 quil permet de circul
leau dans le rseau incendie de lusine. Ce dernier est form par trois pompes horizontales
associes en parallles qui ont aspires leau partir deux rservoirs de capacit total 10000
m
3
. Chaque pompe accouple un moteur lectrique qui fournit lnergie mcanique
(rotation de laxe de la pompe). Elles sont commandes par trois contrleurs chacune. La
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 15
fonction de base du chaque contrleur lectrique est de dmarrer automatiquement ou
manuellement le moteur lectrique de la pompe incendie lorsque la pression diminue dans la
conduite deau principale. Larrt du moteur aprs une priode de fonctionnement peut tre
manuel ou automatique. Ce contrleur comporte galement une fonction de test hebdomadaire
automatique.
Figure 1.3 : Schmatisation du system tudie
3.2. Equipements
3.2.1. Rservoirs et raccordement du pressostat
Rservoirs
Dans lusine GPL, les rservoirs deau dincendie sont forms par deux bacs mtalliques,
figure 1.4 les rservoirs sont capables d'aliments une pompe incendie qui refoule l'eau
prleve en lui communiquant la pression ncessaire dans le rseau.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 16
Figure 0.4 : Bac deau
Raccordement du pressostat
La figure 1.5 montre le raccordement de la conduite du lecteur de pression pour les
commandes de pompe incendie. [2]
Figure 1.5: Montage de raccordement du pressostat une pompe dincendie
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 17
3.2.2. Pompe
Emplacement:
Plusieurs facteurs sont prendre en compte lors du choix de lemplacement de lunit de
pompe, figure 1.6 (Pompe, socle, transmission et couplage). Positionner lunit dans un
endroit sec aussi prs que possible de larrive de la source deau avec une ligne d'aspiration
court et direct.
Figure 0.6 : pompe dincendie
Fondation :
La fondation est suffisamment importante pour absorber toute vibration et pour former un
support rigide et permanent pour la plaque de base, comme montre la figure1.7 des boulons de
fondation dune grosseur approprie sont encastrs dans le ciment un endroit prcis par un
schma ou un gabarit.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 18
Figure 1.7: Croquis dun ancrage de socle typique
Caractristiques techniques:
Le tableau 1.1 regroupe les caractristiques techniques de la pompe. [3]
Tableau 0.1 : Caractristiques techniques de la pompe
3.2.3. Moteur lectrique
La fonction de base du moteur lectrique est soumis une force de rotation sur laxe du pompe,
ce moteur est asynchrone triphas, cage de rotor, avec une constriction compltement
ferme pour un service continu et une installation horizontale. Le degr de protection de
moteur dIP44 IP55. Le tableau 1.2 regroupe les caractristiques techniques du moteur
lectrique. [3]
Spcification pour la pompe
Type : OMEGA250-6000A Fabricant : KSB Matricule : 209535
Capacit (m
3
/h) : 1000 Totale diffrence de la mt 120
Bride daspiration : DN300ANSI300FF Bride de refoulement : DN250ANSI300FF
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 19
Tableau 00.2: Caractristiques techniques du moteur lectrique
Spcification pour moteur
Type : CT400Y4 Fabrication : ASIROBICON Matricule : 71952
Vitesse (rpm) :1485 Pouvoir(KW) : 600
Voltage : 400 v Grade de protection : IP55 Frquence : 50 Hz
3.2.4. Contrleur
Les contrleurs de pompes incendie, figure 1.8 sont conus pour dmarrer automatiquement
une pompe incendie ds quune chute de pression est dtecte sur le rseau dincendie. Ils
sont conus pour dmarrer des moteurs triphass et ils offrent la possibilit dun dpart et
dun arrt manuel ainsi quun dpart automatique initi par la dtection dune chute de
pression par le capteur de pression. [4]
Figure 01.8: contrleur
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 20
Le modle combine automatique /manuel permet un arrt automatique aprs 10 minutes de
marche suivant un dpart automatique mais seulement lorsque toutes les causes de dpart ont
disparu.
Type de contrleur de pompe incendie
Le tableau 1.3 regroupe les caractristiques techniques de contrleur [4]
Tableau 0.3 : Caractristiques techniques de contrleur
Contrleur pompe incendie lectrique moyenne tension dmarreur direct
Prfixe du
modle
Tension Puissance
H.P
Phase Frquence
MPA 6000V 600Kw 3 50Hz
3.2.5. Autres composants
Sprinkler figure 1.7:
Le systme permet de protger les biens et les personnes contre le risque dincendie. Sa mise
en uvre automatique le rend oprant jour et nuit.
Les deux fonctions de base dune installation sont de :
- Dtecter un dpart de feu (automatiquement, dclenchement manuel possible dans le cas
du dluge).
- Selon sa conception, il est possible dteindre lincendie, de le contenir, ou de refroidir
des structures. [5]
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 21
Figure 1.9: Sprinkler
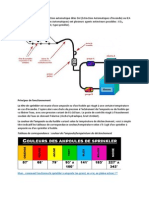
Le systme de protection incendie par brouillard deau est un systme particulier et consiste
dlivrer la quantit de brouillard apte lutter contre le type dincendie redout sur une zone
quand un incendie est dtect.
Lorsquun incendie survient, la chaleur dgage slve et atteint une des ttes de gicleur
rparties sur le plafond. Sous leffet de la chaleur, lampoule ou le fusible qui maintient la tte
ferme est dtruite (lampoule contient un liquide qui exerce une pression sur la paroi en verre
sous leffet de la chaleur et qui rompt ainsi cette fine paroi de lampoule, mais les lments
fusibles faits de matire plastique sont de plus en plus utiliss).
La chute de pression par louverture de la sprinkler va dmarrer les pompes pour maintenir
la pression. [5]
Tableau 01.4 : Tableau rcapitulatif des tempratures de dclenchement en fonction de la
couleur de lampoule
Couleur orange rouge jaune vert bleu violet noir
Temprature
(C)
57 68 79 93 141 182 227
260
Temprature
(F)
135 155 174 200 286 360 440
500
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 22
Poteau incendie
Dans lusine GPL il ya un rseau sous traine deau dincendie sur le quelle se pos des
poteaux dincendie, figure 1.10.
Figure 01.10 : Poteau dincendie
RIA : Robinet Incendie Arm
Figure 1.11 : RIA
4. Problme et solution
4.1. Avantages
Le contrleur model MPA 6000 contient un cran affiche toutes les situations et valeurs
importantes de le contrleur : tensions, courants, pression, dfaut, et tat prt.
Ces caractristiques aideront lutilisateur identifier un problme significatif au contrleur.
[4]
4.2. Inconvnients de contrleur MPA 6000
La prsence dun oprateur localement pour contrle dtat
Trs sensible lentretien
Difficult de dtection des dfauts pour lencombrement
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 23
Dans ce cas, on a propos une solution qui consiste dtudier un contrleur par un automate
siemens s7-300. Cet automate assura les mmes taches de fonction de base que le contrleur
MPA 6000.
4.3. Solutions
Notre solution est de remplacer le fonctionnement de ce contrleur par un automate
programmable industriel qui de manire :
Rduite les pertes de temps du point de vue paramtrage de la machine.
Renforcer la scurit des oprateurs.
Facilite la maintenance.
Transfrer les donnes et les configures.
4.4. Cahier de charge
Le travail demand consiste raliser un contrleur dune pompe dincendie lectrique base
dun automate programmable Siemens S7-300 plus performant et fiable, les diffrentes tapes
de ralisation de ce travail sont :
Etude du principe de fonctionnement de contrleur ;
Dgagement des entres et des sorties (en se basant sur le schma lectrique) ;
Dimensionnement de lautomate utiliser ;
Configuration du matriel de lautomate ;
Prparation du programme (schma contact annexe 1) ;
Etude des mthodes et protocole de communication, configuration et de transfert du
programme ;
Excution de la partie pratique ;
Test et simulation de programme.
5. Conclusion
On a prsent dans ce chapitre une prsentation gnrale de lusine GPL afin davoir une ide
claire sur le principe de fonctionnement du systme tudier. On a aussi pos le problme de
notre projet et la solution souhaite. Les dtails de la solution propose seront prsents dans
le chapitre suivant.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 24
Chapitre 2 : Commande de la pompe base de lautomate
S7 300
1. Introduction
Lautomatisation industrielle trouve son application dans tous les secteurs de lindustrie sous
forme de solution autonomes aux couts optimis ou dans des installations complexes relie au
rseau. Dans ce cadre, on a ralis ltude et conception, pour lancien systme de contrleur
de pompe lectrique dincendie quest cble base de relais, un nouveau contrleur base
dautomate programmable de type Siemens S7- 300 pour dpasser tout type de problme et de
complexit de la commande et de contrle du pompe lectrique.
Dans les mmes soucis dintgrer lautomatisation de ce systme, ce chapitre est consacr
ltude et le commande de pompe dans une premire partie, et la deuxime partie on prsente
lautomate programmable, en cas gnral. Dans la troisime partie, on sintresse sur
lautomate Siemens S7- 300 utilis dans ce projet.
2. Commandes de la pompe
2.1. Commande manuelle :
Lorsque le sectionneur est en position On et le slecteur en mode manuel alors la pompe
prt dmarrer en appuyant sur le bouton MARCHE sans se soucier de la pression du
rseau, le voyant Marche vert doit tre ALLUMEE pour indiquer que la pompe fonctionne.
Larrt manuel se fait par un appuie sur le bouton ARRT.
2.2. Commande automatique
Lorsque le sectionneur est en position On et le slecteur en mode automatique alors le
contrleur est en mode prt dmarrer la pompe lors dune dtection de chute pression
dtecte par le capteur. Le voyant vert ALLUME pour indiquer que la pompe fonctionne. Le
moteur est automatiquement arrt la restauration de la pression (au-dessus du point de
consigne darrt) ou par lappuie sur bouton darrt.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 25
2.3. Autres commandes
Cas Test
Lorsque le sectionneur sont en position On et le slecteur en mode test alors le
contrleur prt dmarrer la pompe. Ou, on dlibra diminuer la pression dans la
conduite principale de leau travers une vanne de vidange pour tester le dmarrage
automatique du pompe. Le voyant marche vert ALLUME pour indiquer que la pompe
fonctionne.
Cas dUrgence
Un fonctionnement manuel durgence est prvu en cas dchec des circuits de
contrle. Ce levier est plac manuellement en position On , position dans laquelle
elle se verrouille automatiquement. Le levier doit tre bascul de la position Off en
position On aussi rapidement que possible. Ce levier ne doit servir quen cas
durgence.
3. Gnralits sur les automates programmables industriels
3.1. Dfinition
Un automate programmable industriel (API) est un appareil lectronique de traitement de
linformation qui effectue des fonctions dautomatisme programmes telles que : Logique
combinatoire, temporisation, comptage, calculs numriques, asservissement et rgulation.
Pour commander, mesurer et contrler au moyen de signaux dentres et sorties (logiques ou
analogiques) diffrentes sorties de machines ou de processus environnement industriel. Il
existe plusieurs fabricants dautomates : Schneider, Siemens, Crozet, Omron, Koyo, Allan
Bradlley. [6]
3.2. Architecture des automates
3.2.1. Aspect extrieur
Les automates peuvent tre de type compact ou modulaire.
De type compact, on distingue les modules de programmation (logo de siemens, zelio,
de Schneider, millenium de Crozet) des micros automates. Il intgre le processeur,
lalimentation, les entes et les sorties. Selon les modles et le fabricant, il pourra
raliser certaines fonctions supplmentaires (comptage rapide, E/S analogique) et
recevoir des extensions en nombre limit.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 26
Ces automates, de fonctionnement simple, sont gnralement destins la commande de
petits automatismes.
De type modulaire : le processeur, lalimentation et les interfaces dentres/sorties
rsident dans des units spares (modules) et sont fixs sur un ou plusieurs racks
contenant le fond de panier (bus plus connecteurs).
Ces automates sont intgrs dans les automatismes complexes ou puissance, capacit de
traitement et flexibilit sont ncessaires. [6]
3.2.2. Principe de fonctionnement
Le traitement lieu en quatre phases :
Phase 1 : Gestion de systme autocontrle de lautomate
Phase2 : Acquisition des entes prise en compte des informations de module dentres
et criture de leur valeur dans RAM (zone donne)
Phase 3 : traitement des donnes
Lecture de programme (situe dans la RAM programme) par lunit de traitement,
lecture des variables (RAM donnes), traitement et criture des variables dans la RAM
donnes.
Phase 4 : Emission des ordres de lecture des variables de sorties dans la RAM donnes
et transferts dans la module de sorties. [6]
3.2.3. Caractristiques techniques
Compact ou modulaire
Tension dalimentation
Taille mmoire
Temps de scrutation
Sauvegarde (EPROM, EEROM, pile,)
Nombres dentres/sorties
Modules complmentaires (analogique, communication,)
Langage
3.2.4. Unit centrale
Lunit centrale est le regroupement du processeur et la mmoire centrale. Elle commande
linterprtation et lexcution des instructions programmes. Les instructions sont effectues
les unes aprs les lautres, squencs par une horloge. Exemple si deux actions doivent tre
simultan lAPI les traites successivement. [6]
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 27
3.2.5. Mmoire
Deux types de mmoire :
La mmoire langage ou est stock le langage de programmation. Elle est en gnrale
fige, c'est--dire en lecture seulement. (ROM : mmoire morte)
La mmoire travail utilisable en lecture-criture pendent le fonctionnement cest la
mmoire RAM (mmoire vive).
Le transfert de lEPROM ou EEPROM vers la mmoire RAM de lautomate, seffectu
chaque reprise secteur et si le contenue de celle-ci est diffrent. [6]
3.3. Objectifs de lautomatisation
3.3.1. De point de vue financement
Rduire les cots de fabrication : en rduisant la main-duvre et en conomisant la
matire et lnergie ;
Amliorer la qualit des produits : les produits fabriqus sur machines automatises
sont plus fiables et surtout de qualit constante ;
Diminuer les dlais de production : lautomatisation augmente les cadences et rduit
les temps de production sur les oprations manuelles ;
Augmenter la flexibilit : les temps de changement de production sont beaucoup plus
courts sur des machines automatises.
3.3.2. Amliorer la scurit et la disponibilit
Rendre la production plus sre : lautomatisation supprime les tches dangereuses ou
rptitives pour le personnel. Les machines doivent des normes de scurit
rigoureuses.
Amliorer la disponibilit : la fiabilit des machines automatises est meilleure, la
maintenance et les pannes sont rduites la commande des machines doit tre aise et
doit offrir tous les modes de marche utiles.
3.4. Critres de choix dun API
Le choix dun A.P.I est en fonction de la partie commande programmer. On doit tenir
compte de plusieurs critres :
Les nombres des entres sorties;
Le temps de traitement ;
La capacit de la mmoire ;
Les nombres des tapes ou dinstruction ;
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 28
Les nombres des compteurs ;
Les nombres des temporisateurs.
4. Prsentation de lAPI Siemens S7-300 utilis
Aprs laboration du nombre dentres et de sorties et lexprience acquis dans les classes
antrieures sur ce type dautomate. Notre choix porte sur lautomate programmable industriel
de gestion de procd de la srie S7-300 du fabricant Siemens, figure 2.1 Le S7-300 est un
systme de commande modulaire pour des applications haut de gamme. Il dispose dune
gamme de modules complte pour une adaptation optimale aux tches les plus diverses et se
caractrise par la facilit de darchitectures dcentralises et la simplicit demploi.
Figure 2.1 : Automate Siemens S7-300
4.1. Etude de la partie matrielle
La figure 2.2, montre la diffrente partie de lautomate S7-300 [6]
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 29
Figure 2.2 : Elments principaux de la tension d'alimentation et de la CPU
4.1.1. Unit centrale CPU 314
Cest le cur de lautomate programmable qui permet de lire et dinterprter les instructions
constituantes le programme inscrit en mmoire. Le CPU 314 de rfrence 6ES7 1AF10-
OABO et de version v.2.0.8 de taille mmoire de travail 48 Ko 0,1ms/kinst port MPI;
configuration multi range jusqu' 32 modules communication S7 (FB/FC chargeables). [7]
4.1.2. Alimentation PS 307
Le numro de rfrence 6ES7307-1EA00-0AA0
Le module d'alimentation PS 307; 5 A se caractrise par les proprits suivantes :
Courant de sortie 5 A ;
Tension nominale de sortie 24 V cc, stabiliss, tenue aux courts-circuits et la marche
vide ;
Raccordement un rseau alternatif monophas (tension nominale d'entre 120/230 V
ca, 50/60 Hz) ;
Sparation de scurit des circuits selon EN 60 950;
Peut servir de tension d'alimentation des capteurs et actionneurs.
La structure du module dalimentation est donne par la figure2.3: [7]
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 30
Figure 2.3 : Schma de branchement des PS 307; 5 A
4.1.3. Modules dentre/sortie (E/S)
Modules dentres : les entres reoivent les signaux en provenance des capteurs et
ralisent les fonctions suivantes : [7]
- Acquisition ;
- Adaptation ;
- Isolement galvanique ;
- Filtrage ;
- Protection contre les signaux parasites.
On a utilis dans notre cas un module de type SM 321 Di 16 x UC 24/48v de rfrence
321-1CH00-OAAO, figure 2.4, la plage de tension dexploitation est de 24 48 V CC et
24 48 V CA ce module possde 16 entres TOR (Tout Ou Rien), pour les entres
logiques dont 8 entres sont utilises.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 31
Figure 02.4: Schma de branchement et de principe du SM 321 ; DI 16 x UC 24/48 V
Et un module de type analogiques SM 331 ; AI 8 x 13 bits de rfrence 331-1KF02-0AB0
dont les proprits sont : [7]
- 10 entres formant 8 groupes ;
- Type de mesure rglable pour chaque groupe de voies : Tension, courant, rsistance et
pression.
La figure 2.5 montre des exemples de branchement.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 32
Figure 02.5 : Schma de branchement et de principe
Module de sortie
Les sortie ralisent les fonctions de mmorisation des donns par le processeur pour permettre
la commande des pr-actionneurs au travers de circuits de dcouplage et damplification.
Nous avons utiliss un module de type SM 322 ; DO32XDC24V/0.5A de rfrence 6ES7322-
1BL00 0AA0 dont la proprit est suivantes :
32 sorties, sparation galvanique par groupes de 8
- courant de sortie 0,5 A ;
- tension d'alimentation nominale 24 Vcc ;
- convenant pour lectrovannes, contacteurs pour courant continu et LED.
La figure ci-aprs montre la correspondance entre voie et adresse :
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 33
Figure 02.6: Schma de branchement et de principe du module SM 322 ; DO 32 x 24 V cc/0,5 A
4.1.4. Rack
Le rack (chssis) est llment qui abrite le processeur et les modules dE/S. Nous avons le
choix entre des tailles de rack. On a choisi un rack de taille 5 emplacements. Le premier
emplacement de rack est rserv lalimentation, le deuxime est rserv au CPU 314 et les
autres emplacements pour les modules dE/S.
4.2. Etude de la partie logicielle (SOFTWARE)
Au point des nouvelles technologies appliques au monde de lautomatisme Siemens a
mobilis son savoir faire pour crer les meilleurs standards ouverts du monde du logiciel et de
la communication, SIMATIC MANAGER , une gamme entirement renouvele de
logiciels dautomatisme. Le logiciel STEP 7 est un outil de programmation pour les systmes
dautomatisation :
SIMATIC S7-300
SIMATIC S7-400
SIMATIC WinAC
Les fonctions suivantes peuvent tre utilises avec STEP 7 pour lautomatisation dun
dispositif :
Configuration et paramtrage du matriel
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 34
Choix de la communication
Programmation
Test et mise en service
Documentation, archivage
Fonctions dexploitation et de diagnostic
Toutes les fonctions sont expliques dans une aide en ligne dtaille.
De notre automate, on a choisit un langage contacte (ladder).
La figure 2.7 montre la fentre du logiciel SIMATIC MANEGER. Avec quatre langages,
STEP7 reprend toutes les valeurs dusage reconnues des logiciels et apporte un ensemble
de nouvelles fonctionnalits pour plus de productivit et douverture.
Les quatre langages pour la programmation sont :
LD : Langage contacts (langage LADDER) ;
IL : Langage liste dinstructions ;
SFC : Langage grafcet ;
ST : Langage littral structur ; langage type informatique permettant
lcriture structure de traitements logiques et numriques ;
FBD : Langage diagramme blocs fonction.
Figure 02.7: Fentre du logiciel SIMATIC STEP7 V5.5
4.2.1. Etude de programmation (langage ladder)
Il existe de nos jours de nombreux modes de reprsentation et de programmation des
automatismes.
Plus au moins adapts aux diffrentes contraintes de conception des systmes. Certains modes
sont appels des langages, dautre des mthodes du concepteur. Le choix du mode de
prsentation doit surtout convenir lutilisateur qui exploite, modifie et fait la maintenance de
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 35
lautomatisme. Dans notre tude, on a procd au langage contacts qui est langage
graphique.
Il utilise des symboles figurant des contacts, ouverture et fermeture, assembls en srie ou en
parallle, de manire reprsenter les conditions darrt ou de marche dun actionneur
(moteur, vanne, etc.).
Prsentation des entres et des sorties
Pour pouvoir excuter les instructions du programme utilisateur, lAPI doit tre capable
didentifier les entres et les sorties au niveau des interfaces associes. Lidentification des
variables physiques correspond lassignation dune zone mmoire adquate de lAPI. La
dclaration d'une entre ou sortie donne l'intrieur d'un programme s'appelle l'adressage.
Les entres et sorties des automates sont la plupart du temps regroupes en groupes de huit
entres ou sorties numriques. Cette unit de huit entres ou sorties est appele un octet.
Ladresse d'octet est divise en huit bits. Ces derniers sont numrots de 0 7. On obtient
ainsi l'adresse du bit. L'automate programmable reprsent ici a les octets d'entre 0 et 1 ainsi
que les octets de sortie 4 et 5 comme montre la figure 2.8 :
Figure 02.8: prsentation des E/S
Le tableau 2.1 regroupe le type de variables et les zones mmoires correspondantes.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 36
Tableau 00.1: type de variable
Type de variables Zone mmoire correspondante
Entre E
Sortie A
Bit interne M
Pour adresser par exemple la cinquime entre partir du haut, il faut entrer l'adresse
suivante :
E 0. 4
E dsigne le type de ladresse : Entre, 0 ladresse de loctet et 4 ladresse du bit.
L'adresse de l'octet et l'adresse du bit sont toujours spares par un point.
A 5. 7
A dsigne le type de ladresse : Sortie, 5 ladresse de loctet et 7 ladresse de bit.
L'adresse de l'octet et l'adresse du bit sont toujours spares par un point.
Les symboles figurant les contacts utiliss pour programmer le systme sont donns par le
tableau suivant :
Tableau 0.2: Exemples des symboles
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 37
4.2.2. Illustration dun rseau contacts
L'interface de programmation est prsente par la figure 2.9 qui montre limplantation dun
rseau contact comme suit:
Figure 0.9 : Interface de programmation
Les programmes dans les blocs de STEP 7 sont dvelopps dans des rseaux spars. Ceci
permet de crer de larges structures et permet une meilleure documentation des titres de
rseaux.
Sauvegarde
du bloc
Chargement du
bloc dans la CPU
Commande frquemment
utilises telles que bote ET,
bote OU, affectation, entre
binaire, ngation de l'entre
binaire, branchement T et
connexion
Catalogue complet
des lments de
programme
Insertion dun
nouveau rseau
Table de dclaration
des variables (n'est
pas utilise dans cet
exemple)
Champs de commentaires et
titres de rseaux et de blocs
C'est ici que vous programmez la
tche l'aide des lments
graphiques LOG
Vous fates glisser les lments de
programme avec la souris dans le
rseau. Il ne vous reste plus qu'
entrer vos oprandes.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 38
4.3. Transfert du programme
Aprs avoir complter le programme, on doit raccorder lautomate par un cble en srie avec
un micro-ordinateur ou une console de programmation puis on lance le transfert du
programme.
La figure 2.10 montre les tapes de programmation dun API
Figure 0 0.10: tapes de programmation dun API
5. Conclusion
Ce chapitre a donn une ide sur le rle de lautomate Siemens S7-300 en prsentant ces
composants. En effet, cet automate est une solution adquate pour la commande des
diffrents actionneurs grce ces modules favorisant la dtection des changements dtat et
lmission des signaux de commande relatifs aux besoins de la situation. Il est exploit via le
logiciel de programmation SIMATIC MANEGER .
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 39
Chapitre 3 : Automatisation et simulation
1. Introduction
Dans ce chapitre, nous dcrivons les tapes de dveloppement de notre projet (Automatisation
du contrleur dune pompe lectrique incendie).
Dans ce cadre, nous prsentons dans une premire partie la grafcet de fonctionnement du
systme. Puis on a donn une programmation dautomate partir logiciel SIMATIC
MANAGER et linterfaces graphiques que nous avons dveloppes. Enfin, nous prsentons
les diffrentes tapes de cblage de lautomate.
2. Grafcet de fonctionnement du contrleur
Comme nous lavons vue dans le chapitre2, le contrleur fonctionne sous quatre opratif
mode manuel, mode automatique, mode test et mode durgence. Ici nous verrons le grafcet
point de vue commande qui nous permettra de faire la programmation.
2.1. Mode manuel
sm.mar
km 1
ar
0
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 40
2.2. Mode automatique
2.3. Mode test
0
st.pt1
km 10
ar +pt2
0
st.pt1
km 10
ar
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 41
2.4. Grafcet globale
Dans notre solution, nous avons deux grafcet de fonctionnement
Grafcet de dmarrage
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 42
Equation des tapes et des sorties
Nomenclature des appareils lectriques relatif au notre projet de fonctionnement et
affectation des entes /sorties de lautomate programmable.
- Entres logiques :
ar : bouton darrt ;
ma : bouton marche de la dmarrage manuelle ;
sm : slecteur en mode manuelle ;
sa : slecteur en mode automatique ;
st : slecteur en mode test ;
dcy : dpart cycle ;
fcy : fin cycle.
- Entres analogiques :
pt1 : pression de dmarrage automatique;
pt2 : pression darrt automatique ;
ct1, ct2 et ct3 : dtecteurs du courant ;
y1, y2 et y3 : dtecteurs de la tension ;
- Sorties logiques :
km : contacteur de moteur ;
vp1, vp2 : deux voyants indiquent la prsence ou labsence de la pression ;
vc1, vc2 et vct3 : trois voyants indiquent la prsence du courant ;
vt1, vt2 et vt3 : trois voyants indiquent la prsence de la tension.
Equation des tapes
Equation tape de repos
0 20 2 10 2 1 0 1 10 20 int; x x pt ar x pt x ar x x x x
Equation de dmarrage manuelle
1 ( 0 1 0)int; x x sm ma x x
Equation de dmarrage test
10 ( 0 1 10 10)int; x x st pt x x
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 43
Equation de dmarrage automatique
20 ( 0 1 20 0)int; x x sa pt x x
Equation de dfaut
0 100 0 100 int; x x fcy x x
100 ( 0 100 0)int; x x dcy x x
Equation des sorties
1 100 1;
2 100 2;
3 100 3;
1 100 1;
2 100 2;
3 100 3;
1 100 1;
2 100 2;
1 10 20 30;
vt x y
vt x y
vt x y
vc x ct
vc x ct
vc x ct
vp x pt
vp x pt
km x x x x
3. Programmation de lautomate
Stratgie pour la conception dune structure programme complte et optimise
La mise en place d'une solution d'automatisation avec STEP7 ncessite la ralisation des
taches fondamentales suivantes :
Cration du projet SIMATIC STEP7
Configuration matrielle HW Config
Dans une table de configuration, on dfinit les modules mis en uvre dans la solution
d'automatisation ainsi que les adresses permettant d'y accder depuis le programme utilisateur,
pouvant en outre, y paramtrer les caractristiques des modules.
Dfinition des mnmoniques
Dans une table des mnmoniques, on remplace des adresses par des mnmoniques locales ou
globales de dsignation plus vocatrice afin de les utiliser dans le programme.
Cration du programme utilisateur
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 44
En utilisant l'un des langages de programmation mis disposition, on cre un programme
affect ou non un module, quon enregistre sous forme de blocs, de sources ou de
diagrammes.
Exploitation des donnes:
Cration des donnes de rfrences : Utiliser ces donnes de rfrence afin de faciliter le test
et la modification du programme utilisateur et la configuration des variables pour le "contrle
commande".
Test du programme et dtection derreurs
Pour effectuer un test, on a la possibilit d'afficher les valeurs de variables depuis le
programme utilisateur ou depuis une CPU, d'affecter des valeurs ces variables et de crer
une table des variables quon souhaite afficher ou forcer.
Chargement du programme dans le systme cible
Une fois la configuration, le paramtrage et la cration du programme termins, on peut
transfrer le programme utilisateur complet ou des blocs individuels dans le systme ciblent
(module programmable de la solution matrielle). La CPU contient dj le systme
d'exploitation.
Surveillance du fonctionnement et diagnostic du matriel
La dtermination des causes d'un dfaut dans le droulement d'un programme utilisateur se
fait l'aide de la Mmoire tampon de diagnostic , accessible depuis le SIMATIC Manager
3.1. Configuration de lautomate
La figure 3.1 donne les composants de lautomate S7-300 [8]
Figure 0 3.1 : Automate Programmable Industriel SIEMENS
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 45
3.2. Cration du projet dans SIMATIC Manager
Afin de crer un nouveau projet STEP7, il nous est possible dutiliser lassistant de cration
de projet , ou bien crer le projet soi mme et le configurer directement, cette dernire est un
peu plus complexe, mais nous permet aisment de grer notre projet. En slectionnant licone
SIMATIC Manager, pour crer notre projet nous excutons les tapes suivantes :
Loutil central dans STEP 7 est SIMATIC Manager , qui est appel par un
double-clique. (SIMATIC Manager).
Les programmes de STEP 7 sont grs dans des projets. Nous allons donc
commencer crer noter projet (Fichier Nouveau), figure3.2.
Figure 3.2: cration de projet
On donne le nom de projet ( projet OK), figure 3.3.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 46
Figure 3.3: titre de projet
Ensuit, une avec bouton droite sur projet insrer un nouvel objet Station
SIMATIC 300, figure 3.4.
Figure 3.4: insertion dun nouvel objet station SIMATIC 300
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 47
Comme le projet est vide il nous faut insrer une station SIMATC 300. Deux approches sont
possibles. Soit on commence par la cration du programme puis la configuration matrielle ou
bien linverse.
3.3. Configuration de matriel (Partie Hardware)
Cest une tape importante, qui correspond lagencement des chssis, des modules et de la
priphrie dcentralise.
Les modules sont fournis avec des paramtres dfinis par dfaut en usine. Une configuration
matrielle est ncessaire pour :
Modifier les paramtres ou les adresses prrgles dun module,
Configurer les liaisons de communication.
Le choix du matriel SIMATIC S300 avec une CPU314 nous conduit introduire la
hirarchie suivante :
On commence par le choix du chssis, figure3.5 selon la station choisie auparavant, Pour la
station SIMATIC S300, on aura le chssis RACK-300 qui comprend un rail profil.
Figure 03.5: choix du RAK
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 48
Sur ce profile, lalimentation pralablement slectionne se trouve dans lemplacement n1.
Parmi celles proposes notre choix sest porte sur la PS-307 5A . La CPU 314 est
imprativement mise lemplacement n2. Lemplacement n3 est rserv comme adresse
logique pour un coupleur dans une configuration multi-chssis, figure 3.6.
Figure 03.6 : choix du CPU et dalimentation
A partir de lemplacement 4, il est possible de monter au choix jusqu'a 8 modules de signaux
(SM), processeurs de communication (CP) ou modules fonctionnels (FM).
Nous allons y mettre les modules dentres et de sorties analogiques et logique ;
Daprs lidentification des E/S du PLC dans le chapitre 2, il y a :
8 entres analogiques (AI)
8 entres numriques (DI)
9 sorties numrique (DO)
Pour assurer la flexibilit du systme, 20% de rserves des E/S sont pourvoir lors de
limplantation du PLC, donc les cartes des E/S sont comme suit, figure 3.7:
Une embase de 8 entres analogiques (8 AI)
Une embase de 16 entres numriques (16 DI)
Une embase de 32 sorties numriques (32 DO)
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 49
Figure 03.7: choix des embases dE/S
Apres cela il ne nous reste qu enregistrer et compiler. La configuration matrielle tant
termine, un dossier Programme S7 est automatiquement insr dans le projet, comme
indique dans la figure 3.8 :
Figure 03.8: Hirarchie du programme STEP7
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 50
3.4. Cration des mnmoniques
Dans tout programme il faut dfinir la liste des variables qui vont tre utilises lors de la
programmation. Pour cela la table des mnmoniques est cre. Lutilisation des noms
appropris rend le programme plus comprhensible est plus facile manipuler. Ce type
dadressage est appel relatif . Pour crer cette table, on suit le cheminement suivant,
figure 3.9 :
Figure 03.9: Cration des mnmoniques
On dite la table des mnmoniques en respectant notre cahier de charges, pour les entres et
les sorties, comme montre la figure 3.10.
Figure 03.10 : Table des mnmoniques du projet
(1) (2)
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 51
3.5. Elaboration du programme S7 (Partie Software)
Les blocs de code
Le dossier bloc, contient les blocs que lon doit charger dans la CPU pour raliser la tache
dautomatisation, il englobe :
- Les blocs de code (OB, FB, SFB, FC, SFC) qui contiennent les programmes,
- Les blocs de donnes DB dinstance et DB globaux qui contiennent les paramtres
du programme.
Les blocs dorganisation (OB)
Les OB sont appels par le systme dexploitation, on distingue plusieurs types :
- ceux qui grent le traitement de programmes cycliques
- ceux qui sont dclenchs par un vnement,
- ceux qui grent le comportement la mise en route de lautomate
programmable
- et en fin, ceux qui traitent les erreurs.
Le bloc OB1 est gnr automatiquement lors de la cration dun projet. Cest le programme
cyclique appel par le systme dexploitation (schmas contact annexe 2).
Slectionnez le dossier Blocs pour insrer un nouveau bloc OB1 dans le projet.
(Blocs), figure 3.11.
Figure 03.11: cration du bloc dorganisation
Il est maintenant possible d'entrer un nom pour le bloc et de slectionner diverses
options pour la documentation des blocs. (OB1 OK), figure 3.12.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 52
Figure 0.12: choix du langage CONT
4. Simulateur des programmes PLCSIM
L'application de simulation de modules S7-PLCSIM, figure 3.13, permet d'excuter et de
tester le programme dans un Automate Programmable (AP) quon simule dans un ordinateur
ou dans une console de programmation. La simulation tant compltement ralise au sein du
logiciel STEP7, il n'est pas ncessaire qu'une liaison soit tablie avec un matriel S7
quelconque (CPU ou module de signaux). L'AP S7 de simulation permet de tester des
programmes destins aux CPU S7-300 et aux CPU S7-400, et de remdier d'ventuelles
erreurs.
S7-PLCSIM dispose d'une interface simple permettant de visualiser et de forcer les diffrents
paramtres utiliss par le programme (comme, par exemple, d'activer ou de dsactiver des
entres). Tout en excutant le programme dans l'AP de simulation, on a galement la
possibilit de mettre en uvre les diverses applications du logiciel STEP7 comme, par
exemple, la table des variables (VAT) afin d'y visualiser et d'y forcer des variables.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 53
Figure 03.13: Interface de simulation PLCSIM
5. Excution de la partie pratique
5.1. Cblage de lautomate
Notre systme est constitu de 16 entres et 9 sorties.
Elle ncessite les matriels suivants, figure 3.14 :
Une Automate Siemens S7-300 constitue par les parties suivantes :
- Un module dalimentation PS 307 ;
- Un CPU 314 ;
- Rack base automate ;
- Deux cartes dentres SM 321 DI16xUC 24/48V et SM 331 AI 8 x 13 ;
- Carte de sortie DO 32 x DC 24V/0.5A .
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 54
Figure 0.14 : cblages de lautomate
Borniers dentres/sorties ;
Fils de raccordement de section 2.5mm
Un transformateur 220V/24V pour lalimentation des modules dentres ;
Disjoncteur calibre 20A
5.2. Cblage des diffrents quipements
Aprs avoir dgag les entres et les sorties de notre systme, on cbl les cartes dentres et
la carte de sortie et les autres quipements.
Lautomate est alimente gnralement par le rseau monophas tension 220V et les cartes
dentres sont alimentes tension 24V.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 55
6. Conclusion
Dans ce dernier chapitre, on a prsent les tapes de dveloppement du programme et leurs
interfaces pour contrler la pompe lectrique dincendie. On a dtaill le principe et les
phases de programmation laide de lautomate SIEMENS S7 300, utilis dans ce projet.
Enfin, on a donn une ide sur la partie pratique o les cblages de lautomate.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 56
CONCLUSION GENERALE
Ce projet est effectu au sein de la socit GPL dans le but dtudier et commander les
pompes lectriques dincendie via un automate programmable industriel Siemens S7 300.
Dans le premier chapitre, on a prsent une ide gnrale sur lusine GPL et on a dcrit en
dtaille le principe de fonctionnement du systme tudi. Puis, on a propos une solution
convenable au problme. Enfin, on a donn le cahier de charge.
Le deuxime chapitre a port sur la commande dun contrleur dune pompe lectrique
dincendie en dtaillant le principe du fonctionnent. Une ide gnrale sur lautomate
programmable industriel a t prsente. Puis, on a trait le cas de notre API Siemens S7-300
en prsentant les diffrents composants associs.
Le troisime chapitre a t consacr lautomatisation en programmant les diffrentes phases
sous SIMATIC MANAGER. Un test de simulation a t effectu.
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 57
Rfrences bibliographiques
[1] : ONS, NESRINE, Optimisation du mode de fonctionnement et de la consommation
nergtique du circuit frigorifique de lusine GPL, ISSIG, 2013 ;
[2] : ARMSTRONG, Pompe incendie plans de joint horizontal manuel dinstallation et
de fonctionnement, 2000 ;
[3] : MOTOPOMPE ELECTRIQUE, fichier technique, 2006 ;
[4] : Manuel dinstallation et dentretien pour les contrleurs de pompe incendie moyenne
tension model MPx, 2006 ;
[5] : SPRINKLEUR, PDF, 2009 ;
[6] : ABDOULAYE CISSE, tude de commande par un automate programmable industriel
dune presse injection horizontale, EPT, 2009 ;
[7] Manuel SIEMENS, Appareils de Terrain pour lAutomatisation des Processus, 2005 ;
[8] : CHAKER ABDELJAOUED, laboration dun systme dautomatisme et de
rgulation dune unit darocondenseur de vapeur deau en replacement dun condenseur de
vapeur eau de mer, NAST, 2010 ;
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 58
ANNEXES
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 59
Annexe 1
Schma lectrique
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 60
Annexe 2
Schmas LADDER
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 61
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 62
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 63
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 64
STEG Stage de fin dtudes
Hamza LATTRACH & Mohamed BELAZRAG Page 65
S-ar putea să vă placă și
- Rapport de StageDocument29 paginiRapport de Stagejbeli yosraÎncă nu există evaluări
- Rapport de Stage GPLDocument29 paginiRapport de Stage GPLPrinter SerivceÎncă nu există evaluări
- Rapport de StageDocument29 paginiRapport de StageEnaHiyaImen100% (2)
- Rapport de Stage 2emeDocument25 paginiRapport de Stage 2emeKhouloud JeridiÎncă nu există evaluări
- La Renovation Du Systeme de Ra - Mouad CHAAIRA - 4187 PDFDocument93 paginiLa Renovation Du Systeme de Ra - Mouad CHAAIRA - 4187 PDFazzam100% (1)
- RAPPORT DE STAGE Soufiane Daoudi-1Document27 paginiRAPPORT DE STAGE Soufiane Daoudi-1rafael704100% (1)
- Rapport de Stage Steg RadesDocument52 paginiRapport de Stage Steg Radessbj100% (2)
- Rapport Du Stage Steg PDFDocument24 paginiRapport Du Stage Steg PDFAmi RaÎncă nu există evaluări
- Rapport de Stage Steg Goulette 2Document25 paginiRapport de Stage Steg Goulette 2Ali D. Haj Hassan100% (2)
- Rapport de Stage Hamza KhalfaouiDocument70 paginiRapport de Stage Hamza KhalfaouiRaafet ErguezÎncă nu există evaluări
- Modele Powerpoint StegDocument4 paginiModele Powerpoint StegAla MassoudiÎncă nu există evaluări
- Rapport de Stage d'IMACID (Elabbas Bachir)Document55 paginiRapport de Stage d'IMACID (Elabbas Bachir)Bachir El Abbas50% (4)
- Rapport de Stage 2008 HEDI ENISDocument32 paginiRapport de Stage 2008 HEDI ENISzineddinmakram100% (1)
- Rapport de Stage GMODocument33 paginiRapport de Stage GMOKhàliiDo's Dik100% (1)
- Rapport de StageDocument12 paginiRapport de StagedaminÎncă nu există evaluări
- Rapport Stagecompensation de L'energie Reactive en Basse Tension CIMATDocument38 paginiRapport Stagecompensation de L'energie Reactive en Basse Tension CIMATlalalandÎncă nu există evaluări
- Rapport de Stage-ConvertiDocument28 paginiRapport de Stage-ConvertiAhmed Kired100% (1)
- Rapport de Stage NaDocument19 paginiRapport de Stage NaNoor Ammar100% (1)
- Rapport de Stage Electrique FatmaDocument26 paginiRapport de Stage Electrique FatmadaminÎncă nu există evaluări
- Redersseur S3 Et PD3-S3Document8 paginiRedersseur S3 Et PD3-S3Elias Mattar100% (1)
- SOUSSE - UCC1 - Description Générale de La Centrale-Rev1Document19 paginiSOUSSE - UCC1 - Description Générale de La Centrale-Rev1Maher Bwz100% (1)
- Zakaria RapportDocument36 paginiZakaria RapportKaidi HanaaÎncă nu există evaluări
- Rapport de Stage Steg RadesDocument51 paginiRapport de Stage Steg RadesRefka KaabiÎncă nu există evaluări
- Rapport de Stage Nouvelle Version 2Document14 paginiRapport de Stage Nouvelle Version 2Yassine HADIR100% (2)
- Compte Rendu TunnelDocument13 paginiCompte Rendu TunnelAnass AMMARÎncă nu există evaluări
- TP 3: Machine À Courant Continu: I/ ObjectifsDocument4 paginiTP 3: Machine À Courant Continu: I/ ObjectifsChaabane Bouali100% (1)
- Rapport de Stage Goulette PascDocument34 paginiRapport de Stage Goulette Pascjbeli jbeli0% (1)
- Rapport PFE OCP - NAHIDI HassanDocument92 paginiRapport PFE OCP - NAHIDI HassanNahidi100% (1)
- Rapport de Stage Groupe ÉlectrogèneDocument25 paginiRapport de Stage Groupe ÉlectrogèneFatĺma EL Faridi100% (1)
- Rapport de Stage ONEDocument30 paginiRapport de Stage ONEMz DdÎncă nu există evaluări
- Rapport de Stae HamzaDocument24 paginiRapport de Stae HamzaRajaa Ks100% (1)
- Projet BTSDocument23 paginiProjet BTSKenny Nkori100% (2)
- Rapport de Stage Cabel ElectriqueDocument23 paginiRapport de Stage Cabel ElectriqueÇha Ïma100% (1)
- Rapport de StageDocument22 paginiRapport de StageNaim HouesÎncă nu există evaluări
- T P PDFDocument7 paginiT P PDFSmail GuillaÎncă nu există evaluări
- Rapport de StageDocument50 paginiRapport de Stageameg15100% (1)
- Rapport de StageDocument46 paginiRapport de Stageazzam100% (1)
- Analyse de Fonctionnement Automatisation Et Supervision Des Groupes Turbo-Alternateurs Au PDFDocument157 paginiAnalyse de Fonctionnement Automatisation Et Supervision Des Groupes Turbo-Alternateurs Au PDFHasen BeKhÎncă nu există evaluări
- Estimation de L'état de Charge D'une Batterie Lithium-Ion Utilisée Pour Les Voitures ÉlectriquesDocument77 paginiEstimation de L'état de Charge D'une Batterie Lithium-Ion Utilisée Pour Les Voitures ÉlectriquesSalah SalahhamdiÎncă nu există evaluări
- Mini Projet-Commande D'un Conv DC-DC A Base D'un Reg PIDDocument13 paginiMini Projet-Commande D'un Conv DC-DC A Base D'un Reg PIDSalmi Nour E'ddineÎncă nu există evaluări
- Rapport de Stage OuvrierDocument32 paginiRapport de Stage OuvrierFédia El Mabrouk100% (4)
- Synthèse de StageDocument13 paginiSynthèse de StageMohamed Hichou Haj100% (3)
- MemoireDocument41 paginiMemoireRANIAÎncă nu există evaluări
- Amélioration Des Performances Du Réseau Basse Tension PDFDocument36 paginiAmélioration Des Performances Du Réseau Basse Tension PDFsamueldotou100% (1)
- Rapport de Stage LP-MécatroniqueDocument53 paginiRapport de Stage LP-MécatroniqueIhsan Afriad0% (1)
- Rapport Final Du Pfe PDFDocument74 paginiRapport Final Du Pfe PDFHåyamùøš Elrävø Svcēntrøī100% (1)
- Rapport de StageesDocument45 paginiRapport de StageesSaiyef Caesar50% (4)
- Projet Final Steg SousseDocument51 paginiProjet Final Steg Soussenadhir100% (1)
- Rapport de StageDocument32 paginiRapport de StageMarwane Ch100% (1)
- Rapport StageDocument23 paginiRapport StageFATAHOU Ahamadi67% (3)
- Rapport Chambre Du CombustionDocument87 paginiRapport Chambre Du Combustionhanae100% (2)
- Rapport de Stage de Fin D'etudes (Réparé)Document76 paginiRapport de Stage de Fin D'etudes (Réparé)Abdelkrim IDIRÎncă nu există evaluări
- Rapport de Stage MouradDocument31 paginiRapport de Stage MouradYasSine YasSine Abba50% (2)
- Rapport de Stage Steg RadesDocument52 paginiRapport de Stage Steg RadesMohamed Somai89% (28)
- Rapport Station de PompageDocument65 paginiRapport Station de PompagesaidÎncă nu există evaluări
- Rapport de Stage TechniqueDocument50 paginiRapport de Stage TechniqueMohammed bajjouÎncă nu există evaluări
- Rapport Du PFEDocument31 paginiRapport Du PFEAbdelkrim IDIRÎncă nu există evaluări
- Automatisation Et Commande Ele - JARJAR Meriem - 1966Document55 paginiAutomatisation Et Commande Ele - JARJAR Meriem - 1966HEDIMI IBRAHIMÎncă nu există evaluări
- Gestion Des Pièces de Rechanges StageDocument56 paginiGestion Des Pièces de Rechanges StageMANAL ALILOUÎncă nu există evaluări
- Id 11464 PDFDocument48 paginiId 11464 PDFMednini PurÎncă nu există evaluări
- Les Moteurs DieselDocument6 paginiLes Moteurs DieselMednini PurÎncă nu există evaluări
- Id 11464 PDFDocument48 paginiId 11464 PDFMednini PurÎncă nu există evaluări
- Copiercoursplasturgieversion00 150210093827 Conversion Gate02 PDFDocument124 paginiCopiercoursplasturgieversion00 150210093827 Conversion Gate02 PDFc oussamaÎncă nu există evaluări
- Restauration DemonstrationDocument3 paginiRestauration DemonstrationMednini PurÎncă nu există evaluări
- Rapport Annuel AFD VFDocument68 paginiRapport Annuel AFD VFMednini PurÎncă nu există evaluări
- Copiercoursplasturgieversion00 150210093827 Conversion Gate02 PDFDocument124 paginiCopiercoursplasturgieversion00 150210093827 Conversion Gate02 PDFc oussamaÎncă nu există evaluări
- Nouveau Document Microsoft Office WordDocument2 paginiNouveau Document Microsoft Office WordMednini PurÎncă nu există evaluări
- Rapport Mini Projet Personnalisé (Monte-Charge)Document24 paginiRapport Mini Projet Personnalisé (Monte-Charge)Saf Bes85% (13)
- DemandeDocument1 paginăDemandeMednini PurÎncă nu există evaluări
- Bonne Pratique RiaDocument24 paginiBonne Pratique RiaDiden Dz100% (1)
- Basic Fire Safety & Emergency Evacuation VFDocument69 paginiBasic Fire Safety & Emergency Evacuation VFTOUNSY NAWALÎncă nu există evaluări
- CPS Firefighting Ocp - JacobsDocument44 paginiCPS Firefighting Ocp - JacobsBouchedda YassineÎncă nu există evaluări
- Formation Sonatrach 09-2Document53 paginiFormation Sonatrach 09-2nbnb100% (1)
- Gardena T 1030 Card Art.1830Document19 paginiGardena T 1030 Card Art.1830Frédéric DautremerÎncă nu există evaluări
- Regle Dinstalation RiaDocument59 paginiRegle Dinstalation Riaomar smailÎncă nu există evaluări
- Les Installations Fixes DDocument2 paginiLes Installations Fixes DLarache ThamiÎncă nu există evaluări
- Multiprevention Fiche Inspection Securite IncendieDocument2 paginiMultiprevention Fiche Inspection Securite Incendieالطاهر فرديÎncă nu există evaluări
- A000338 A000352 A000353 A000339 A023074 A000316 - Extincteurs - Automatiques - PendulairesDocument4 paginiA000338 A000352 A000353 A000339 A023074 A000316 - Extincteurs - Automatiques - Pendulairesimane karaouaneÎncă nu există evaluări
- Brûleurs Fioul WL5-PB-H Purflam BE2019-03Document76 paginiBrûleurs Fioul WL5-PB-H Purflam BE2019-03Christophe MassinÎncă nu există evaluări
- Articles CO1 À CO60Document34 paginiArticles CO1 À CO60performasn135 assÎncă nu există evaluări
- Securite Immeuble IghDocument2 paginiSecurite Immeuble IghDaouda NDOYEÎncă nu există evaluări
- Rfii TFP181 - FRDocument6 paginiRfii TFP181 - FRMohamed KhaldiÎncă nu există evaluări
- Obligations Des Etablissements Recevant Du Public ERPDocument8 paginiObligations Des Etablissements Recevant Du Public ERPKamalDouamÎncă nu există evaluări
- Tableau Des Principaux Controles Periodiques en 2022Document3 paginiTableau Des Principaux Controles Periodiques en 2022Electro_Far_comÎncă nu există evaluări
- REG Checklist Mesures Arrêt Prolongé 200331Document2 paginiREG Checklist Mesures Arrêt Prolongé 200331DekenÎncă nu există evaluări
- Annexe 3 - Dimensionnement Sprinklage Entrepot Les ArcsDocument20 paginiAnnexe 3 - Dimensionnement Sprinklage Entrepot Les Arcsyassine bouhloulÎncă nu există evaluări
- ISO-11799 Requirements For Archive and Library Materials FRADocument22 paginiISO-11799 Requirements For Archive and Library Materials FRAWładysław TatarkiewiczÎncă nu există evaluări
- Atmosphères Explosives HSEDocument324 paginiAtmosphères Explosives HSEZamoum Said100% (1)
- Calcul SprinklerDocument9 paginiCalcul SprinklermechkourÎncă nu există evaluări
- Iris PDFDocument12 paginiIris PDFGhislain MugishoÎncă nu există evaluări
- Memento - APSSI - SBT52000238 - IndH - WEB - MEDIUM PDFDocument118 paginiMemento - APSSI - SBT52000238 - IndH - WEB - MEDIUM PDFbena omer100% (1)
- PTN 2021 2023Document399 paginiPTN 2021 2023Morad damachÎncă nu există evaluări
- AO - RFQ#116546 - Etude Trentenaire DGH - Cahier Des ChargesDocument8 paginiAO - RFQ#116546 - Etude Trentenaire DGH - Cahier Des ChargeskdsessionsÎncă nu există evaluări
- Offre de Formation N°1Document7 paginiOffre de Formation N°1ToumiÎncă nu există evaluări
- Guide Pratique D9A PDFDocument12 paginiGuide Pratique D9A PDFmarcelbinmarcelÎncă nu există evaluări
- Revit Mep Bim 5jDocument4 paginiRevit Mep Bim 5jAnonymous adud1Cp2Încă nu există evaluări
- NF en 12259-2Document34 paginiNF en 12259-2FATIMA ZAHRA MELKOU100% (1)