S-ar putea să vă placă și
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDe la EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkÎncă nu există evaluări
- Field Oriented ControlDocument16 paginiField Oriented ControlNik RumziÎncă nu există evaluări
- Electromechanical Control With Synchronous MachineDocument12 paginiElectromechanical Control With Synchronous MachinesdahbxcÎncă nu există evaluări
- Help - Asynchronous Machine - Blocks (SimPowerSystems™) PDFDocument23 paginiHelp - Asynchronous Machine - Blocks (SimPowerSystems™) PDFnmulyonoÎncă nu există evaluări
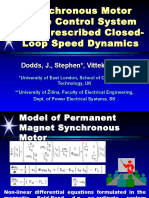
- Synchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsDocument20 paginiSynchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsVijay RajuÎncă nu există evaluări
- Modeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerDocument8 paginiModeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerYassine MbzÎncă nu există evaluări
- 25 Permanent Magnet Motor Design PDFDocument39 pagini25 Permanent Magnet Motor Design PDFbitconcepts60% (5)
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocument6 paginiComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20Încă nu există evaluări
- Etep 1Document20 paginiEtep 1berndÎncă nu există evaluări
- 17 Permanent Magnet Motor DesignDocument41 pagini17 Permanent Magnet Motor DesignMehmet Kırgözoğlu100% (4)
- Twin Rotor Mimo System: Experiment No: 5Document8 paginiTwin Rotor Mimo System: Experiment No: 5sameer sultanÎncă nu există evaluări
- Solutions To Selected Problems C1-C3Document12 paginiSolutions To Selected Problems C1-C3Prichindel MorocanosÎncă nu există evaluări
- Harmonics Reduction 1Document10 paginiHarmonics Reduction 1Swaminathan SrinivasanÎncă nu există evaluări
- Comparison of Speed Control of PMSM With PI, PID& Adaptive PID PDFDocument8 paginiComparison of Speed Control of PMSM With PI, PID& Adaptive PID PDFLê Đức ThịnhÎncă nu există evaluări
- Adaptive Fuzzy Control For PMSMDocument9 paginiAdaptive Fuzzy Control For PMSMTrung Hieu NguyenÎncă nu există evaluări
- Sensors: Sensorless Control of The Permanent Magnet Synchronous MotorDocument25 paginiSensors: Sensorless Control of The Permanent Magnet Synchronous MotorSteve DemirelÎncă nu există evaluări
- Sliding Mode Control of Surface-Mount Permanent-Magnet Synchronous Motor Based On Error Model With Unknown LoadDocument7 paginiSliding Mode Control of Surface-Mount Permanent-Magnet Synchronous Motor Based On Error Model With Unknown LoadDamla SarıtaşÎncă nu există evaluări
- Adaptive Compensator For A Vehicle Driven by Two Independent MotorsDocument18 paginiAdaptive Compensator For A Vehicle Driven by Two Independent MotorsMohd Afzal BiyabaniÎncă nu există evaluări
- Asynchronous MachineDocument15 paginiAsynchronous MachineboumedienÎncă nu există evaluări
- Modeling and Analysis of DC-DC Converters Under Pulse Skipping ModulationDocument6 paginiModeling and Analysis of DC-DC Converters Under Pulse Skipping ModulationJeba AntonyÎncă nu există evaluări
- Inverted Pendulum Design With Hardware Fuzzy Logic ControllerDocument6 paginiInverted Pendulum Design With Hardware Fuzzy Logic ControlleranonymousxxÎncă nu există evaluări
- Paper Title: Ajay Kumar Gudla and Saikat ChakrabartiDocument5 paginiPaper Title: Ajay Kumar Gudla and Saikat ChakrabartiAshutosh KumarÎncă nu există evaluări
- Lab ManualDocument9 paginiLab ManualnatashaÎncă nu există evaluări
- Stator Winding Induction Motor in The EMTPDocument8 paginiStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaÎncă nu există evaluări
- Jeas 0408 94Document7 paginiJeas 0408 94Jun Chee LimÎncă nu există evaluări
- DatasheetDocument16 paginiDatasheetSandu VisanescuÎncă nu există evaluări
- Fuzzy Logic Control Design For Induction Motor Speed Control Improvement Through Field Oriented ControlDocument9 paginiFuzzy Logic Control Design For Induction Motor Speed Control Improvement Through Field Oriented ControlAchairformy SkincareÎncă nu există evaluări
- Fuzzy Logic Based Direct Power Control of Induction Motor DriveDocument11 paginiFuzzy Logic Based Direct Power Control of Induction Motor DriveNagulapati KiranÎncă nu există evaluări
- Geng-Juan GUO, Zu-Hua FANG, Ying SUN, Xue-Feng YE and Jia-Le WANGDocument5 paginiGeng-Juan GUO, Zu-Hua FANG, Ying SUN, Xue-Feng YE and Jia-Le WANGkrishnaÎncă nu există evaluări
- Simulation and Analysis of Modified DTC of PMSMDocument10 paginiSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeÎncă nu există evaluări
- Compensation Techniques For A Vehicle System Driven by Independent DC MotorsDocument24 paginiCompensation Techniques For A Vehicle System Driven by Independent DC MotorsMohd Afzal BiyabaniÎncă nu există evaluări
- Shi Guobiao, Zhao Songhui, Min JunDocument6 paginiShi Guobiao, Zhao Songhui, Min JunnajibÎncă nu există evaluări
- Optimal Control of Interior Permanent Magnet Synchronous Integrated Starter-GeneratorDocument9 paginiOptimal Control of Interior Permanent Magnet Synchronous Integrated Starter-GeneratorMuhammad MudassarÎncă nu există evaluări
- Sensorless Control of Permanent Magnet Synchronous Motor With Stator Flux EstimationDocument5 paginiSensorless Control of Permanent Magnet Synchronous Motor With Stator Flux EstimationPhước Linh TrầnÎncă nu există evaluări
- New DTC WRKDocument8 paginiNew DTC WRKNAENWI YAABARIÎncă nu există evaluări
- Machines EPM405A Presentation 06Document18 paginiMachines EPM405A Presentation 06Ibrahim AhmedÎncă nu există evaluări
- Synergetic and Sliding Mode Controls of A PMSM: A Comparative StudyDocument5 paginiSynergetic and Sliding Mode Controls of A PMSM: A Comparative StudymellahÎncă nu există evaluări
- An Adaptive Input-Output Feedback Linearization Controller For Doubly-Fed Induction Machine DrivesDocument16 paginiAn Adaptive Input-Output Feedback Linearization Controller For Doubly-Fed Induction Machine Drivesashikhmd4467Încă nu există evaluări
- Improved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersDocument10 paginiImproved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersEdamEdamÎncă nu există evaluări
- Permanent Magnet MotorDocument44 paginiPermanent Magnet Motorjohnny_celica130Încă nu există evaluări
- Visco MeterDocument5 paginiVisco MeterYasin KaradaşÎncă nu există evaluări
- PID1711735 Preprint PDFDocument6 paginiPID1711735 Preprint PDFJavier Jose Salgado RodriguezÎncă nu există evaluări
- A Sensorless Robust Vector Control of Induction Motor DrivesDocument6 paginiA Sensorless Robust Vector Control of Induction Motor DrivesLava KumarÎncă nu există evaluări
- Comparison Between Butterfly Optimization Algorithm and Particle Swarm Optimization For Tuning Cascade PID Control System of PMDC MotorDocument9 paginiComparison Between Butterfly Optimization Algorithm and Particle Swarm Optimization For Tuning Cascade PID Control System of PMDC MotorFresy NugrohoÎncă nu există evaluări
- Digital Simulation of Field-Oriented ControlDocument8 paginiDigital Simulation of Field-Oriented ControlNishantÎncă nu există evaluări
- Project Report PDFDocument11 paginiProject Report PDFAlind DubeyÎncă nu există evaluări
- Vector Controlled Reluctance Synchronous Motor Drives With Prescribed Closed-Loop Speed DynamicsDocument16 paginiVector Controlled Reluctance Synchronous Motor Drives With Prescribed Closed-Loop Speed DynamicsNguyễn Đức QuậnÎncă nu există evaluări
- Mca 01 00066Document7 paginiMca 01 00066djkeags24Încă nu există evaluări
- Eiiunivteity: Independentv Ontrolof TH Ive-L Bythe Expandedtwo-Arm OdulatbnmDocument7 paginiEiiunivteity: Independentv Ontrolof TH Ive-L Bythe Expandedtwo-Arm OdulatbnmkesraouihichemÎncă nu există evaluări
- Ece5765 Chapter 2Document52 paginiEce5765 Chapter 2Shah HussainÎncă nu există evaluări
- Modelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDocument88 paginiModelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDao Van ManhÎncă nu există evaluări
- Drone PID Controller LabDocument8 paginiDrone PID Controller Labjoshimeet479Încă nu există evaluări
- Diagnosis by Parameter Estimation of Stator and Rotor Faults Occuring in Induction MachinesDocument9 paginiDiagnosis by Parameter Estimation of Stator and Rotor Faults Occuring in Induction MachinesStephano Saucedo ReyesÎncă nu există evaluări
- Module 6: A.C. Electrical Machines For Hybrid and Electric Vehicles Lecture 21: Field Oriented Control of Induction MotorDocument10 paginiModule 6: A.C. Electrical Machines For Hybrid and Electric Vehicles Lecture 21: Field Oriented Control of Induction Motorketan bhereÎncă nu există evaluări
- x1dxt: Y1 D 0: z1 D 0: r1 D X1$i Cy1$j Cz1 K I: TD 1 2 $ M$rr1 C 1 2 $ m$rr2Document4 paginix1dxt: Y1 D 0: z1 D 0: r1 D X1$i Cy1$j Cz1 K I: TD 1 2 $ M$rr1 C 1 2 $ m$rr2keimasterÎncă nu există evaluări
- Lec 3 DC DC ConvertersDocument37 paginiLec 3 DC DC ConvertersSanjoy PathakÎncă nu există evaluări
- Sensors 14 23119Document18 paginiSensors 14 23119Krishna KumarÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsDe la EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsÎncă nu există evaluări
- Facebook and Information Operations v1Document13 paginiFacebook and Information Operations v1Alan FaragoÎncă nu există evaluări
- 6002x Additional ResourcesDocument1 pagină6002x Additional ResourcesRahulsinghooooÎncă nu există evaluări
- Design West Android Sanderson Integrating Sensor Hardware AndroidDocument27 paginiDesign West Android Sanderson Integrating Sensor Hardware Androidphamvan_tuongÎncă nu există evaluări
- Sensor Data Fusion Using Kalman FilterDocument7 paginiSensor Data Fusion Using Kalman Filterphamvan_tuongÎncă nu există evaluări
- Choosing Your Test System Software ArchitectureDocument21 paginiChoosing Your Test System Software Architecturephamvan_tuongÎncă nu există evaluări
- FlowCAD An Color VisibilityDocument8 paginiFlowCAD An Color Visibilityphamvan_tuongÎncă nu există evaluări
- Kelley Prototyping Shorthand DesignSummer 01Document9 paginiKelley Prototyping Shorthand DesignSummer 01Lorena GaytanÎncă nu există evaluări
- Book Summary The Design of Business by MartinDocument10 paginiBook Summary The Design of Business by Martinphamvan_tuongÎncă nu există evaluări
- Tps3700 Window ComparatorDocument24 paginiTps3700 Window Comparatorphamvan_tuong100% (1)
- CRC Implementation Code in CDocument12 paginiCRC Implementation Code in Cphamvan_tuongÎncă nu există evaluări
- Laws of SimplicityDocument1 paginăLaws of SimplicityBhazemÎncă nu există evaluări
- Security As A New Dimension in Embedded System DesignDocument9 paginiSecurity As A New Dimension in Embedded System Designphamvan_tuongÎncă nu există evaluări
- BluetoothLowEnergySerialPortAdapter GettingStartedDocument27 paginiBluetoothLowEnergySerialPortAdapter GettingStartedphamvan_tuongÎncă nu există evaluări
- Global Vs Static Vs Local VariablesDocument2 paginiGlobal Vs Static Vs Local Variablesphamvan_tuongÎncă nu există evaluări
- Kinetis KM3x MCU Single-Phase Metering Reference DesignDocument2 paginiKinetis KM3x MCU Single-Phase Metering Reference Designphamvan_tuongÎncă nu există evaluări
- S02 Sensorless Control For Electric MotorsDocument17 paginiS02 Sensorless Control For Electric Motorsphamvan_tuongÎncă nu există evaluări
- Bring On The Learning RevolutionDocument7 paginiBring On The Learning Revolutionphamvan_tuongÎncă nu există evaluări
- Slaa576 Capacitive Touch Hardware Design GuideDocument24 paginiSlaa576 Capacitive Touch Hardware Design Guidephamvan_tuongÎncă nu există evaluări
- Slvsbt3b Three-Phase Brushless Motor DriverDocument38 paginiSlvsbt3b Three-Phase Brushless Motor Driverphamvan_tuongÎncă nu există evaluări
- Pitfalls For Real Time Software Developer - 2Document11 paginiPitfalls For Real Time Software Developer - 2phamvan_tuongÎncă nu există evaluări
- Slaa392 Understanding MSP430 Flash Data RetentionDocument12 paginiSlaa392 Understanding MSP430 Flash Data Retentionphamvan_tuongÎncă nu există evaluări
- Provisional Patent Appli Ctions Next StepsDocument17 paginiProvisional Patent Appli Ctions Next Stepsphamvan_tuongÎncă nu există evaluări
- Documentation On Setting Up SPI Protocol For ADE7878Document8 paginiDocumentation On Setting Up SPI Protocol For ADE7878phamvan_tuong100% (1)