S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Comportamiento Estructural de PilasDocument8 paginiComportamiento Estructural de PilasSolis EdwinÎncă nu există evaluări
- Calculus Based Physics 2: Question TextDocument40 paginiCalculus Based Physics 2: Question Textmark buenaflorÎncă nu există evaluări
- 7 Elect-Plan-SymbolsDocument34 pagini7 Elect-Plan-SymbolsNatalie CorpuzÎncă nu există evaluări
- Assignment4 SolutionsDocument12 paginiAssignment4 SolutionsabaalharthiÎncă nu există evaluări
- NaCl Solution SaturationDocument30 paginiNaCl Solution SaturationDaniyal Naeem33% (3)
- Fluid DynamicsDocument3 paginiFluid DynamicsKaanÎncă nu există evaluări
- The Hall Effect in GermaniumDocument12 paginiThe Hall Effect in GermaniumSanele ZiqubuÎncă nu există evaluări
- Electrical Control For Machines 7th Edition Lobsiger Solutions ManualDocument34 paginiElectrical Control For Machines 7th Edition Lobsiger Solutions Manualnicoledickersonwmncpoyefk100% (16)
- Program Design for Speed and Agility TrainingDocument72 paginiProgram Design for Speed and Agility TrainingLaila SigitÎncă nu există evaluări
- As78Xxa: A Product Line of Diodes IncorporatedDocument23 paginiAs78Xxa: A Product Line of Diodes IncorporatedCipto Edi SarwonoÎncă nu există evaluări
- 3 Kinematics-Motion GraphsDocument3 pagini3 Kinematics-Motion GraphsRavi LallÎncă nu există evaluări
- Pme 111 - L3-5 - DmimDocument22 paginiPme 111 - L3-5 - DmimAbu SayeedÎncă nu există evaluări
- Femorals PDFDocument145 paginiFemorals PDFnoronisa talusobÎncă nu există evaluări
- Machine Harness Connector and Component Locations: Electrical System 320C ExcavatorDocument2 paginiMachine Harness Connector and Component Locations: Electrical System 320C ExcavatorYudi setiawanÎncă nu există evaluări
- Atomic Orbitals: Skills To DevelopDocument19 paginiAtomic Orbitals: Skills To Developمحمود محمدÎncă nu există evaluări
- HALF-REACTION METHODBalancing Redox EquationsDocument8 paginiHALF-REACTION METHODBalancing Redox EquationsJunell TadinaÎncă nu există evaluări
- Spark 2000 BS: Instruction ManualDocument63 paginiSpark 2000 BS: Instruction ManualMárcio FernandesÎncă nu există evaluări
- RMS - Complete Rework StationDocument2 paginiRMS - Complete Rework StationDeepak GehlotÎncă nu există evaluări
- A Sedimentary Anayisis Using Wireline LogsDocument29 paginiA Sedimentary Anayisis Using Wireline LogsAngel SaldañaÎncă nu există evaluări
- Physics HSSC 1 Paper II-4Document16 paginiPhysics HSSC 1 Paper II-4Qudsia AbrarÎncă nu există evaluări
- Circuit Layout of A House: Physics 2 ProjectDocument8 paginiCircuit Layout of A House: Physics 2 ProjectJohn Gerwin Delas AlasÎncă nu există evaluări
- TDM 1.2 100 300 W1 Ac Servocontroller Indramat ManualDocument38 paginiTDM 1.2 100 300 W1 Ac Servocontroller Indramat ManualDaniel Dobaño Fernandez100% (3)
- General Physics 1: Quarter 1 - Module 1Document24 paginiGeneral Physics 1: Quarter 1 - Module 1Saiza BarrientosÎncă nu există evaluări
- SPH-DEM For Extremely Deformable ParticlesDocument17 paginiSPH-DEM For Extremely Deformable ParticlesfconnerÎncă nu există evaluări
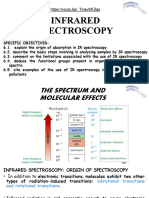
- 2.1. IR SpectrosDocument56 pagini2.1. IR Spectroshussaini polackÎncă nu există evaluări
- Test - 07: Neet Prep Test SeriesDocument20 paginiTest - 07: Neet Prep Test SeriesADITYA KUMARDEWANGANÎncă nu există evaluări
- Chapter 11Document9 paginiChapter 11kiaunaÎncă nu există evaluări
- Review On Hydrodynamic Analysis of Journal Bearing Using Computational Fluid DynamicsDocument5 paginiReview On Hydrodynamic Analysis of Journal Bearing Using Computational Fluid DynamicsMuhamad IkhsanÎncă nu există evaluări
- PPKKK: Scholars College of Sciences Muridke Physics Chapter #12Document1 paginăPPKKK: Scholars College of Sciences Muridke Physics Chapter #12Muhammad Hassan MaqsoodÎncă nu există evaluări
- Transistors by Le CroissetteDocument296 paginiTransistors by Le CroissetteDeepam kulshreshthaÎncă nu există evaluări