S-ar putea să vă placă și
- Cinematica Tridimensional de Un Cuerpo Rigido - FisikaDocument47 paginiCinematica Tridimensional de Un Cuerpo Rigido - FisikaMarlonMendietaNolasco100% (1)
- Momentos de InerciaDocument1 paginăMomentos de InerciaLuis Angel Mendoza VelascoÎncă nu există evaluări
- Tarea U1 Temas1.4 Cinemá Centro Instantaneo SNDocument2 paginiTarea U1 Temas1.4 Cinemá Centro Instantaneo SNAlan OrtizÎncă nu există evaluări
- Ejercicios Coordenadas Polares y CilíndricasDocument1 paginăEjercicios Coordenadas Polares y CilíndricasReyner LozaÎncă nu există evaluări
- Talleres de Física Diver Jesus Janer FavianDocument28 paginiTalleres de Física Diver Jesus Janer FavianDiver LopezÎncă nu există evaluări
- PRACTICA DIRIGIDA Ndeg2Document2 paginiPRACTICA DIRIGIDA Ndeg2Arnold Ochochoque ArcosÎncă nu există evaluări
- Maqueta de Vibraciones DinamicaDocument9 paginiMaqueta de Vibraciones DinamicaYeltsin Huatangari Alarcon0% (1)
- RM P2 Actividad 8 Resumen Video de Esfuerzos CombinadosDocument7 paginiRM P2 Actividad 8 Resumen Video de Esfuerzos CombinadosDHFLJAÎncă nu există evaluări
- Crucigrama MetrologíaDocument2 paginiCrucigrama MetrologíaErick SolanoÎncă nu există evaluări
- 2.4 Variación de ParámetrosDocument5 pagini2.4 Variación de ParámetrosomarÎncă nu există evaluări
- Carga EstaticaDocument12 paginiCarga Estaticamarco0% (1)
- 05.1 Ejercicios Sistemas de Fuerzas Concurrentes 3DDocument3 pagini05.1 Ejercicios Sistemas de Fuerzas Concurrentes 3DHectorAdrianLunaSalgado100% (1)
- Fundamentos de Dinámica Ingenieria Civil PUCPDocument2 paginiFundamentos de Dinámica Ingenieria Civil PUCPJhesus GarciaÎncă nu există evaluări
- Formulas de Newton-CotesDocument4 paginiFormulas de Newton-CotesVanessa GalazÎncă nu există evaluări
- PROBLEMA 9.32 Y 9.61 - CorrectoDocument7 paginiPROBLEMA 9.32 Y 9.61 - CorrectoEdwin CcahuayaÎncă nu există evaluări
- PRÁCTICA 5 Termodinámica 2022Document9 paginiPRÁCTICA 5 Termodinámica 2022Memo MascaruaÎncă nu există evaluări
- Formula Rio 2Document3 paginiFormula Rio 2yesenia lipa manriqueÎncă nu există evaluări
- Resumen de MC de Materiales de GereDocument23 paginiResumen de MC de Materiales de GereSebastián Martínez GarcíaÎncă nu există evaluări
- Problemario Cap 3Document4 paginiProblemario Cap 3Losé WoldanÎncă nu există evaluări
- D13 Ponluisa Carla 4689Document10 paginiD13 Ponluisa Carla 4689Jonathan TipantaÎncă nu există evaluări
- Ejercicios, Unidad 9 - CompressedDocument18 paginiEjercicios, Unidad 9 - CompressedFrancisco barrientosÎncă nu există evaluări
- Ejercicios Resueltos de Mecánica de Fluidos de MootDocument15 paginiEjercicios Resueltos de Mecánica de Fluidos de MootSamuel EstupiñanÎncă nu există evaluări
- PortafolioDocument11 paginiPortafolioalexÎncă nu există evaluări
- Tema 7 Esfuerzo Combinados PDFDocument32 paginiTema 7 Esfuerzo Combinados PDFFernando SolisÎncă nu există evaluări
- Guía de Aprendizaje 04 - Dinámica PDFDocument26 paginiGuía de Aprendizaje 04 - Dinámica PDFQuispe Espinoza ChristianÎncă nu există evaluări
- Pendulo Fisica 1 Marco TeoricoDocument6 paginiPendulo Fisica 1 Marco TeoricoDeboraÎncă nu există evaluări
- Semana 13 - EstaticaDocument23 paginiSemana 13 - EstaticaRex 14Încă nu există evaluări
- Ejercicio Ejes RotativosDocument2 paginiEjercicio Ejes Rotativosalexislirio99Încă nu există evaluări
- Tema 2. Cinemática Del Sólido RígidoDocument53 paginiTema 2. Cinemática Del Sólido RígidoAustinÎncă nu există evaluări
- Corte Directo y Angulo de ReposoDocument4 paginiCorte Directo y Angulo de ReposoSergio Muñoz RiquelmeÎncă nu există evaluări
- 1 ParcialDocument6 pagini1 ParcialalbertoarkÎncă nu există evaluări
- Capitulo 2 Esfuerzos y Deformaciones (A) Versión 2015Document41 paginiCapitulo 2 Esfuerzos y Deformaciones (A) Versión 2015Wilmer Calle CruzÎncă nu există evaluări
- Resistenca de Materiales I PDFDocument53 paginiResistenca de Materiales I PDFAgustin Mansilla TrujilloÎncă nu există evaluări
- ESFUERZODocument16 paginiESFUERZOMauricio Coutiño FerrazÎncă nu există evaluări
- Ejercicios de DinamicaDocument9 paginiEjercicios de DinamicaManuel MedinaÎncă nu există evaluări
- Fisica Tarea1Document3 paginiFisica Tarea1Armando Franco AlfaroÎncă nu există evaluări
- Geometria Analitica en r3Document56 paginiGeometria Analitica en r3Jordano Andrade Urgilés100% (1)
- Elemento ResorteDocument7 paginiElemento ResorteRicardo Gallarzo Jr.Încă nu există evaluări
- Amasado Por SaturacionDocument5 paginiAmasado Por SaturacionVicTor VasquezÎncă nu există evaluări
- Examen de Suspension de Resistencia de Materiales de Ingenieria IndustrialDocument2 paginiExamen de Suspension de Resistencia de Materiales de Ingenieria IndustrialSantiago ChotoÎncă nu există evaluări
- Formulas Elementales de Integración PDFDocument2 paginiFormulas Elementales de Integración PDFCarlosDeLaMataÎncă nu există evaluări
- Resistencia Ejercicios de TorsionDocument5 paginiResistencia Ejercicios de TorsionAnali CabreraÎncă nu există evaluări
- RE-10-LAB-085 FISICA I v11Document64 paginiRE-10-LAB-085 FISICA I v11Brenda Mamani MelgarejoÎncă nu există evaluări
- Cap 4Document12 paginiCap 4RojasJosuesÎncă nu există evaluări
- Problemas Estatica MC Enero 18Document37 paginiProblemas Estatica MC Enero 18Adriana ReyesÎncă nu există evaluări
- Elem I 20%iDocument2 paginiElem I 20%iaineeÎncă nu există evaluări
- Capitulo 5 Flexión CUADERNO DE EJERCICIO 10Document4 paginiCapitulo 5 Flexión CUADERNO DE EJERCICIO 10Jhon Kevin Canaviri MamaniÎncă nu există evaluări
- Problemas EngranajesDocument3 paginiProblemas EngranajesjulioserranoserranoÎncă nu există evaluări
- Roz Amien ToDocument7 paginiRoz Amien ToJuank AlmeidaÎncă nu există evaluări
- Actividad MecanismosDocument7 paginiActividad MecanismosJuan Carlos Rodriguez HuertaÎncă nu există evaluări
- Ejercicios Capitulo 4 Beer Johnston PDFDocument7 paginiEjercicios Capitulo 4 Beer Johnston PDFVillalobos Huanambal LuisÎncă nu există evaluări
- Guía de DinámicaDocument4 paginiGuía de DinámicaRufina TamayoÎncă nu există evaluări
- Dinamica Ii Cinematica Tridimensional deDocument8 paginiDinamica Ii Cinematica Tridimensional deRONNY WILLIAMS YENQUE MEDINAÎncă nu există evaluări
- Presentación Dinámica Unidad 5Document36 paginiPresentación Dinámica Unidad 5Alma Marcela GozoÎncă nu există evaluări
- Ejercicio de Movimiento Relativo y Sist No InercialesDocument6 paginiEjercicio de Movimiento Relativo y Sist No InercialesGuadalupeÎncă nu există evaluări
- Cinematica Plana de Un Cuerpo Rigido PDFDocument57 paginiCinematica Plana de Un Cuerpo Rigido PDFJonathanAndresÎncă nu există evaluări
- Análisis y Comprensión de Materiales BibliográficosDocument11 paginiAnálisis y Comprensión de Materiales BibliográficosRoberth David Pinoargote ZambranoÎncă nu există evaluări
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe la EverandHomografía: Homografía: Transformaciones en Visión por ComputadorÎncă nu există evaluări
- Analisis MarginalDocument10 paginiAnalisis MarginalMarcoMoncayoÎncă nu există evaluări
- Función de Transferencia y Aplicación Transfomada de LaplaceDocument4 paginiFunción de Transferencia y Aplicación Transfomada de LaplaceMarcoMoncayoÎncă nu există evaluări
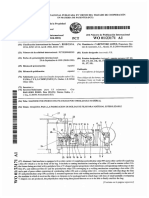
- Patente Maquina de Bolsas de EsterilizacionDocument24 paginiPatente Maquina de Bolsas de EsterilizacionMarcoMoncayoÎncă nu există evaluări
- Manual de Esterilizacion para Centros de SaludDocument188 paginiManual de Esterilizacion para Centros de SaludpucgyverÎncă nu există evaluări
- GuiaUnidad4CI P42 MARZO2013Document24 paginiGuiaUnidad4CI P42 MARZO2013MarcoMoncayoÎncă nu există evaluări
- Deformacion de VigasDocument4 paginiDeformacion de VigasMily Gallardo100% (1)
- Control de Temperatura de Un InvernaderoDocument6 paginiControl de Temperatura de Un InvernaderoMarcoMoncayoÎncă nu există evaluări
- TC4 Diagramas Bloque PDFDocument16 paginiTC4 Diagramas Bloque PDFEnrique Santiago MaldonadoÎncă nu există evaluări
- Plan de Mantenimiento Fresadora CNCDocument6 paginiPlan de Mantenimiento Fresadora CNCMarlon GeronimoÎncă nu există evaluări
- Plan de Mantenimiento Fresadora CNCDocument6 paginiPlan de Mantenimiento Fresadora CNCMarlon GeronimoÎncă nu există evaluări
- Programa de MantenimientoDocument2 paginiPrograma de MantenimientoMarcoMoncayoÎncă nu există evaluări
- Plan de Mantenimiento Fresadora CNCDocument6 paginiPlan de Mantenimiento Fresadora CNCMarlon GeronimoÎncă nu există evaluări
- Practica 1 Seminario de InventorDocument3 paginiPractica 1 Seminario de InventorMarcoMoncayoÎncă nu există evaluări
- Carro Con Control AnalogicoDocument7 paginiCarro Con Control AnalogicoMarcoMoncayoÎncă nu există evaluări
- 2 Propiedades Magnéticas 01 3Document12 pagini2 Propiedades Magnéticas 01 3ayelenÎncă nu există evaluări
- Movimiento CircularDocument7 paginiMovimiento CircularrobefiÎncă nu există evaluări
- PBS Comunes RM Modulo 2Document7 paginiPBS Comunes RM Modulo 2AlexÎncă nu există evaluări
- Primeros Parciales Fisica CBCDocument123 paginiPrimeros Parciales Fisica CBCestatutofacial64Încă nu există evaluări
- Glosario SIGDocument4 paginiGlosario SIGsantisteban camposÎncă nu există evaluări
- Examen VectoresDocument2 paginiExamen Vectoreseric simancasÎncă nu există evaluări
- Producto Vectorial, Escalar y MixtoDocument49 paginiProducto Vectorial, Escalar y MixtoPaul GPÎncă nu există evaluări
- Analisis de Fuerza Al Levantar Un ObjetoDocument7 paginiAnalisis de Fuerza Al Levantar Un ObjetoDani M RodriguezÎncă nu există evaluări
- Mecanismos - 6MM4 - Problemario 1er Parcial - Belmont Díaz JavierDocument8 paginiMecanismos - 6MM4 - Problemario 1er Parcial - Belmont Díaz JavierJavier PosadaÎncă nu există evaluări
- Ejercicios Hibbeler ParesDocument12 paginiEjercicios Hibbeler ParesLuis Diego0% (2)
- Taller 1Document2 paginiTaller 1Gerardo Cerqueda MilánÎncă nu există evaluări
- 07 Campos CorrDocument4 pagini07 Campos CorrJeremy Soto CastilloÎncă nu există evaluări
- 1 Oscilaciones FDocument170 pagini1 Oscilaciones FJulián Jair Cadena SánchezÎncă nu există evaluări
- Meca GeneralidadesDocument21 paginiMeca Generalidadesfranklin castellanos meloÎncă nu există evaluări
- Taller Funciones VectorialesDocument3 paginiTaller Funciones VectorialesLuis Miguel LeonÎncă nu există evaluări
- Temario OrdinarioDocument44 paginiTemario OrdinarioVeronica CruzÎncă nu există evaluări
- Unidad 5 - Dinamica de La ParticulaDocument48 paginiUnidad 5 - Dinamica de La ParticulaRocio QuirogaÎncă nu există evaluări
- Taller 1Document33 paginiTaller 1Jeiver MartínezÎncă nu există evaluări
- Teoría Coordenadas CilindricasDocument4 paginiTeoría Coordenadas CilindricasLeticia PinaÎncă nu există evaluări
- Lab 6 Potencia Fasores e ImpedanciaDocument15 paginiLab 6 Potencia Fasores e Impedancianicolas melendezÎncă nu există evaluări
- TP 2 Cinematica Particula 2013Document3 paginiTP 2 Cinematica Particula 2013Alejandro MaxitÎncă nu există evaluări
- Teoría de Ecuaciones - (Uspensky) Ed. LimusaDocument396 paginiTeoría de Ecuaciones - (Uspensky) Ed. LimusaDavid Goiz Martínez100% (22)
- Física (Vectores Ii) Clase 02Document3 paginiFísica (Vectores Ii) Clase 02xxgino999xxxÎncă nu există evaluări
- Vectores y Propiedades UnapDocument4 paginiVectores y Propiedades UnapSMITH HGÎncă nu există evaluări
- Teorema de La Divergencia PDFDocument9 paginiTeorema de La Divergencia PDFFernando Hurtado RojasÎncă nu există evaluări
- Simulacro de Examen Fisica 5°Document2 paginiSimulacro de Examen Fisica 5°Jose LuisÎncă nu există evaluări
- Complemento VectoresDocument7 paginiComplemento VectoresSanthier Mosquera AmpudiaÎncă nu există evaluări
- Librodefisicabasica2daparte 130324181057 Phpapp01 PDFDocument31 paginiLibrodefisicabasica2daparte 130324181057 Phpapp01 PDFRomel Rodrimo RenoguezÎncă nu există evaluări
- Tema 5 Campo MagnéticoDocument27 paginiTema 5 Campo MagnéticoRuben ZubillagaÎncă nu există evaluări
- Fisica NMS Explicacion de TemasDocument12 paginiFisica NMS Explicacion de TemasHesther CoronaÎncă nu există evaluări