S-ar putea să vă placă și
- Seagate Diagnostic CommandDocument45 paginiSeagate Diagnostic CommandCepii MojicoÎncă nu există evaluări
- Multifunction Peripherals for PCs: Technology, Troubleshooting and RepairDe la EverandMultifunction Peripherals for PCs: Technology, Troubleshooting and RepairÎncă nu există evaluări
- Seagate Diagnostic CommandDocument45 paginiSeagate Diagnostic CommandchandraÎncă nu există evaluări
- Seagate Command ReferenceDocument59 paginiSeagate Command ReferenceLaura Dunne Rocco100% (1)
- Seagate 7200.11 Terminal Commands - Hard Disk Drive TechnoDocument9 paginiSeagate 7200.11 Terminal Commands - Hard Disk Drive TechnoOlga BurlakovaÎncă nu există evaluări
- Home About Contact: How To Fix Bricked Seagate Hard Disk (With Illustrations)Document12 paginiHome About Contact: How To Fix Bricked Seagate Hard Disk (With Illustrations)ClaudioÎncă nu există evaluări
- Сигейт F3 Serial Port DiagnosticsDocument60 paginiСигейт F3 Serial Port Diagnosticssvm9050% (2)
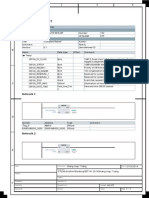
- Module Photo PDFDocument21 paginiModule Photo PDFINTERSOFT khansirÎncă nu există evaluări
- Repair MCMT Error With LED 00000047Document4 paginiRepair MCMT Error With LED 00000047waranha100% (1)
- Motherboard Manaul Sata Sis 964Document41 paginiMotherboard Manaul Sata Sis 964Hercilio De Alcântara SilvaÎncă nu există evaluări
- Fixing A Seagate 7200.11 Hard DriveDocument22 paginiFixing A Seagate 7200.11 Hard Driveajlapria100% (1)
- Challenges of SSD Forensic Analysis (37p)Document37 paginiChallenges of SSD Forensic Analysis (37p)Akis KaragiannisÎncă nu există evaluări
- Seagate DB35.3 ManualDocument48 paginiSeagate DB35.3 ManualRadu ConstantinÎncă nu există evaluări
- SRP Samsung ManualDocument21 paginiSRP Samsung ManualMarcusÎncă nu există evaluări
- Computer Hardware Repairing Course - Computer Hardware Repairing Institute - Computer Hardware Repairing Training Delhi Tilak NagarDocument4 paginiComputer Hardware Repairing Course - Computer Hardware Repairing Institute - Computer Hardware Repairing Training Delhi Tilak NagarRakesh MahajanÎncă nu există evaluări
- Seagate Terminal M CommandDocument11 paginiSeagate Terminal M CommandRaul Alexandru Culda100% (1)
- Seagate Firmware Error FixDocument1 paginăSeagate Firmware Error Fixaaabbb144Încă nu există evaluări
- Seagate F3 Series Command SummaryDocument14 paginiSeagate F3 Series Command SummaryCarlos EnriqueÎncă nu există evaluări
- DFL WD Cracked PDFDocument2 paginiDFL WD Cracked PDFRaj KishoreÎncă nu există evaluări
- Deep Spar Disk ImagerDocument3 paginiDeep Spar Disk ImagerdadhuÎncă nu există evaluări
- StudyDocument15 paginiStudydk mobileÎncă nu există evaluări
- MB Level 2 - 1 Training MaterialsDocument24 paginiMB Level 2 - 1 Training MaterialsFernando Amaro HernandezÎncă nu există evaluări
- Flobo Hard Disk Repair Data Recovery ManualDocument24 paginiFlobo Hard Disk Repair Data Recovery ManualMarin Marin100% (1)
- Determine If Your Motherboard Is DeadDocument8 paginiDetermine If Your Motherboard Is DeadSasi DharanÎncă nu există evaluări
- #HDD #Notdetected #HarddiskDocument71 pagini#HDD #Notdetected #HarddisksebastianÎncă nu există evaluări
- SW Driver User Manual For Marvell Serial ATA Host AdaptersDocument116 paginiSW Driver User Manual For Marvell Serial ATA Host Adapterstosser12Încă nu există evaluări
- STR-3000 English ManualDocument31 paginiSTR-3000 English ManualYusuf Agustaf SatrianiÎncă nu există evaluări
- Asus Notebook Training Actre l2-1 PDFDocument27 paginiAsus Notebook Training Actre l2-1 PDFJúnior CremonezÎncă nu există evaluări
- SRP Toshiba Fujitsu Firmware RepairsDocument18 paginiSRP Toshiba Fujitsu Firmware RepairsJose Antonio Delgado DomínguezÎncă nu există evaluări
- DFL FRP For Hitachi Manual PDFDocument26 paginiDFL FRP For Hitachi Manual PDFAndre De CapitaniÎncă nu există evaluări
- F3 SerialPort DiagnosticsDocument497 paginiF3 SerialPort Diagnosticshehelh100% (1)
- Quanta Et2t r3c SchematicsDocument27 paginiQuanta Et2t r3c Schematicsrmartins_239474Încă nu există evaluări
- HITACHI What Is The Purpose of This 4Document4 paginiHITACHI What Is The Purpose of This 4Sergio OrtegaÎncă nu există evaluări
- Complete Restart (Ob100)Document3 paginiComplete Restart (Ob100)quyetÎncă nu există evaluări
- Compal La-8951p r0.1 SchematicsDocument55 paginiCompal La-8951p r0.1 SchematicsPaulo AmaralÎncă nu există evaluări
- MB L1 Training MaterialsDocument94 paginiMB L1 Training Materialsharvey1specter-1Încă nu există evaluări
- Easy Technical Guide To Understand PC Motherboard, Troubleshoot Problems and Its Repair: PART - IIIDocument3 paginiEasy Technical Guide To Understand PC Motherboard, Troubleshoot Problems and Its Repair: PART - IIIAnonymous lPvvgiQjRÎncă nu există evaluări
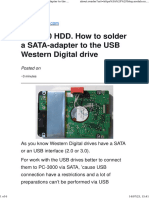
- PC-3000 HDD. How To Solder A SATA-Adapter To The USB Western Digital Drive PC-3000 Support BlogDocument6 paginiPC-3000 HDD. How To Solder A SATA-Adapter To The USB Western Digital Drive PC-3000 Support Blogvampire_mercy8476Încă nu există evaluări
- Dell Beep CodeDocument1 paginăDell Beep CodeBivek BasnetÎncă nu există evaluări
- Debug Card Manual 1 PDFDocument29 paginiDebug Card Manual 1 PDFPavel PetrescuÎncă nu există evaluări
- Seagate F3 Series Common Short CircuitDocument30 paginiSeagate F3 Series Common Short CircuitAnyÎncă nu există evaluări
- E2900 - Status Chs ComponentDocument5 paginiE2900 - Status Chs ComponentKang AmengÎncă nu există evaluări
- Hasee HP500 Laptop SchematicsDocument41 paginiHasee HP500 Laptop SchematicsbrunnofranklinÎncă nu există evaluări
- Sony Vaio Vgn-Ns Series Foxconn m790!1!01 Rev 1.0 SCHDocument54 paginiSony Vaio Vgn-Ns Series Foxconn m790!1!01 Rev 1.0 SCHCarlos Henrique RibasÎncă nu există evaluări
- Gambit MLK MT - A00 - 20180202 - 01Document107 paginiGambit MLK MT - A00 - 20180202 - 01Tin Học Chí CôngÎncă nu există evaluări
- PC Seagate Baracuda - NetDocument101 paginiPC Seagate Baracuda - NetFábio DominguesÎncă nu există evaluări
- Guide To Using The Video Card Testing ProgramDocument7 paginiGuide To Using The Video Card Testing ProgramDiego Campina RealÎncă nu există evaluări
- Disable Dead Zone in Harddisk SeagateDocument2 paginiDisable Dead Zone in Harddisk Seagatevexus100% (2)
- Seagate Diagnostic CommandDocument45 paginiSeagate Diagnostic CommandMesteroiu Bogdan100% (1)
- Seagate Part1 PDFDocument113 paginiSeagate Part1 PDFwaranhaÎncă nu există evaluări
- HDD TutorialDocument8 paginiHDD Tutorialeem1kvÎncă nu există evaluări
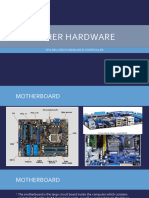
- Otherhardware Updated Js2019 Clo1 Week3Document54 paginiOtherhardware Updated Js2019 Clo1 Week3somerandomhedgehog100% (1)
- Laptop SchematicDocument111 paginiLaptop SchematicnegrusrlÎncă nu există evaluări
- Computer - Hardware - Diagnosing & Fixing Motherboard FaultsDocument4 paginiComputer - Hardware - Diagnosing & Fixing Motherboard Faultsscribdraza786Încă nu există evaluări
- Moshell CommandDocument6 paginiMoshell CommandFab MensonÎncă nu există evaluări
- HW2 Operating SystemsDocument9 paginiHW2 Operating SystemsSainadh GodenaÎncă nu există evaluări
- LTE MO CommandsDocument41 paginiLTE MO CommandsRohit Singh Tomar78% (9)
- LTE MO CommandsDocument25 paginiLTE MO CommandsmahmoudÎncă nu există evaluări
- ELEC 2441 - Computer Organization and MicroprocessorsDocument18 paginiELEC 2441 - Computer Organization and MicroprocessorsBillyÎncă nu există evaluări
- Key WindowsDocument5 paginiKey Windowsanita rahmawatiÎncă nu există evaluări
- Creating Lego Charts v3.2Document53 paginiCreating Lego Charts v3.2Bitcoin UpdateÎncă nu există evaluări
- C in Depth PDFDocument25 paginiC in Depth PDFDiana PetrariuÎncă nu există evaluări
- Ipinfusion Company Interview Questions Asked at 5 Years ExperienceDocument4 paginiIpinfusion Company Interview Questions Asked at 5 Years ExperienceAnjani Kumar RaiÎncă nu există evaluări
- Web Services in SAP Business ByDesign PDFDocument72 paginiWeb Services in SAP Business ByDesign PDFashwiniÎncă nu există evaluări
- PI Buffering User GuideDocument33 paginiPI Buffering User GuidePaul Ramos CarcaustoÎncă nu există evaluări
- Memory Management in LINUXDocument16 paginiMemory Management in LINUXShifan DemahomÎncă nu există evaluări
- Ns2 LectureDocument34 paginiNs2 LectureIndira HatibovicÎncă nu există evaluări
- Java Grade 11 Part 3Document64 paginiJava Grade 11 Part 3TanavÎncă nu există evaluări
- Chapter 7: Networking Concepts: IT Essentials v6.0Document7 paginiChapter 7: Networking Concepts: IT Essentials v6.0Chan ChanÎncă nu există evaluări
- Secure CommunicationsDocument11 paginiSecure CommunicationsharrisboyÎncă nu există evaluări
- Behind The Face-Tips and Tricks in Autocad Plant 3D: DescriptionDocument18 paginiBehind The Face-Tips and Tricks in Autocad Plant 3D: Descriptionjignesh chauhanÎncă nu există evaluări
- SIEMENS-TIA Portal First Steps (Turck)Document43 paginiSIEMENS-TIA Portal First Steps (Turck)Jorge_Andril_5370100% (5)
- KADaoInfo ReadmeDocument2 paginiKADaoInfo ReadmeNombreÎncă nu există evaluări
- Design and Analysis of Algorithms - MCQS: Home About Us Contact Our PolicyDocument9 paginiDesign and Analysis of Algorithms - MCQS: Home About Us Contact Our PolicymoominÎncă nu există evaluări
- SQL: Foreign KeyDocument5 paginiSQL: Foreign KeyHomo CyberneticusÎncă nu există evaluări
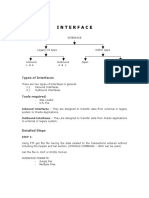
- Interface: Types of InterfacesDocument3 paginiInterface: Types of InterfacesashibekÎncă nu există evaluări
- 1536594096226resume NikitaDocument4 pagini1536594096226resume NikitaAnonymous L83ttOwAeHÎncă nu există evaluări
- Lecture - 15 Dynamic Interconnection NetworksDocument13 paginiLecture - 15 Dynamic Interconnection NetworksmohsinmanzoorÎncă nu există evaluări
- CADS RC3D - Release Notes PDFDocument6 paginiCADS RC3D - Release Notes PDFengrrozayÎncă nu există evaluări
- Assembly in QbasicDocument72 paginiAssembly in QbasicOrhan OranÎncă nu există evaluări
- Plcio - V4 3 0Document92 paginiPlcio - V4 3 0fusti_88Încă nu există evaluări
- Magicard API Iss 10Document39 paginiMagicard API Iss 10Miguel Angel Torres VargasÎncă nu există evaluări
- Chap 10 - Arena Integration and CustomizationDocument54 paginiChap 10 - Arena Integration and CustomizationRobson Almeida100% (1)
- The OSI Model and Tcp/Ip Protocol SuiteDocument48 paginiThe OSI Model and Tcp/Ip Protocol SuiteJeet KarmakarÎncă nu există evaluări
- Photoshop CS5 Restoration and Retouching For Digital Photographers Only PreviewDocument11 paginiPhotoshop CS5 Restoration and Retouching For Digital Photographers Only PreviewambermozinaÎncă nu există evaluări
- Manual ISADocument49 paginiManual ISARenzo DHuancaÎncă nu există evaluări
- Program 2 Assignment KitDocument14 paginiProgram 2 Assignment KitGabriela VazquezÎncă nu există evaluări
- Interview Que Only For CognosDocument6 paginiInterview Que Only For Cognossiva_mmÎncă nu există evaluări
- EX2CPPDocument20 paginiEX2CPPBacalaureat Iorga20% (5)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsDe la EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsEvaluare: 5 din 5 stele5/5 (4)
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (229)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsDe la EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongÎncă nu există evaluări
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)De la EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Evaluare: 5 din 5 stele5/5 (2)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneDe la EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneÎncă nu există evaluări
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Evaluare: 5 din 5 stele5/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]De la EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Evaluare: 5 din 5 stele5/5 (4)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002De la EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Evaluare: 5 din 5 stele5/5 (1)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDe la EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XEvaluare: 3 din 5 stele3/5 (2)
- Computer Science: A Concise IntroductionDe la EverandComputer Science: A Concise IntroductionEvaluare: 4.5 din 5 stele4.5/5 (14)
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Încă nu există evaluări
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideDe la EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideÎncă nu există evaluări
- The comprehensive guide to build Raspberry Pi 5 RoboticsDe la EverandThe comprehensive guide to build Raspberry Pi 5 RoboticsÎncă nu există evaluări
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsDe la EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsEvaluare: 4.5 din 5 stele4.5/5 (49)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionDe la EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionEvaluare: 5 din 5 stele5/5 (2)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneDe la EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneÎncă nu există evaluări
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusDe la EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusÎncă nu există evaluări
- The User's Directory of Computer NetworksDe la EverandThe User's Directory of Computer NetworksTracy LaqueyÎncă nu există evaluări
- Jensen Huang's Nvidia: Processing the Mind of Artificial IntelligenceDe la EverandJensen Huang's Nvidia: Processing the Mind of Artificial IntelligenceÎncă nu există evaluări