S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- GMsetDocument8 paginiGMsetdilo001Încă nu există evaluări
- Mfz-Odv065r15j DS 1-0-0 PDFDocument1 paginăMfz-Odv065r15j DS 1-0-0 PDFelxsoonÎncă nu există evaluări
- Fairs in Punjab 2021-22Document9 paginiFairs in Punjab 2021-22Suchintan SinghÎncă nu există evaluări
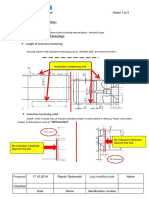
- Induction Hardening - Interpretation of Drawing & Testing PDFDocument4 paginiInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHÎncă nu există evaluări
- LOGARITHMS, Exponentials & Logarithms From A-Level Maths TutorDocument1 paginăLOGARITHMS, Exponentials & Logarithms From A-Level Maths TutorHorizon 99Încă nu există evaluări
- Shaw-Box Hoist - 700 Series Electric Wire Rope 10 To 25 Ton Manual PDFDocument68 paginiShaw-Box Hoist - 700 Series Electric Wire Rope 10 To 25 Ton Manual PDFMbalekelwa MpembeÎncă nu există evaluări
- Absence Makes The Heart Grow FonderDocument27 paginiAbsence Makes The Heart Grow FondereljhunÎncă nu există evaluări
- Technote Torsional VibrationDocument2 paginiTechnote Torsional Vibrationrob mooijÎncă nu există evaluări
- 2290 PDFDocument222 pagini2290 PDFmittupatel190785Încă nu există evaluări
- Project Data Collection & Risk ReportingDocument2 paginiProject Data Collection & Risk Reportinggambler yeagerÎncă nu există evaluări
- Knowing Annelida: Earthworms, Leeches and Marine WormsDocument4 paginiKnowing Annelida: Earthworms, Leeches and Marine WormsCherry Mae AdlawonÎncă nu există evaluări
- GERD – Definition, pathophysiology, epidemiology and diagnostic investigationsDocument132 paginiGERD – Definition, pathophysiology, epidemiology and diagnostic investigationsSorana VasilescuÎncă nu există evaluări
- Blood Group 3Document29 paginiBlood Group 3Hamirie JoshuaÎncă nu există evaluări
- Electrical Units of MeasureDocument36 paginiElectrical Units of MeasureHyung BaeÎncă nu există evaluări
- Specifications Sheet ReddyDocument4 paginiSpecifications Sheet ReddyHenry CruzÎncă nu există evaluări
- Stavanger Tourist SpotDocument96 paginiStavanger Tourist Spotregupathi6413Încă nu există evaluări
- REMEDIATION-Focus BDocument13 paginiREMEDIATION-Focus BCharmaine PerioÎncă nu există evaluări
- GT ĐỀ 04Document39 paginiGT ĐỀ 04Cao Đức HuyÎncă nu există evaluări
- Kingspan Spectrum™: Premium Organic Coating SystemDocument4 paginiKingspan Spectrum™: Premium Organic Coating SystemNikolaÎncă nu există evaluări
- Vishwabhanu Oct '18 - Jan '19Document26 paginiVishwabhanu Oct '18 - Jan '19vedicvision99100% (3)
- Jual Sokkia SET 350X Total Station - Harga, Spesifikasi Dan ReviewDocument5 paginiJual Sokkia SET 350X Total Station - Harga, Spesifikasi Dan Reviewbramsalwa2676Încă nu există evaluări
- Datasheet Optris XI 410Document2 paginiDatasheet Optris XI 410davidaldamaÎncă nu există evaluări
- Fatigue Life Prediction of A320-200 Aileron Lever Structure of A Transport AircraftDocument4 paginiFatigue Life Prediction of A320-200 Aileron Lever Structure of A Transport AircraftMohamed IbrahimÎncă nu există evaluări
- Appendix C: Time Value of MoneyDocument15 paginiAppendix C: Time Value of MoneyrockerÎncă nu există evaluări
- Kerala Electricity Regulatory Commission Schedule of TariffDocument36 paginiKerala Electricity Regulatory Commission Schedule of TariffvjtheeeÎncă nu există evaluări
- My Medications ListDocument5 paginiMy Medications Listhussain077Încă nu există evaluări
- Manual Del GVMapper v3 3 PDFDocument102 paginiManual Del GVMapper v3 3 PDFguanatosÎncă nu există evaluări
- QUESTION A2 and A3 Examples PDFDocument24 paginiQUESTION A2 and A3 Examples PDFDemian VeÎncă nu există evaluări
- HS-2172 Vs HS-5500 Test ComparisonDocument1 paginăHS-2172 Vs HS-5500 Test ComparisonRicardo VillarÎncă nu există evaluări
- Advanced Composite Materials Design EngineeringDocument19 paginiAdvanced Composite Materials Design EngineeringpanyamnrÎncă nu există evaluări