S-ar putea să vă placă și
- Test para MecánicosDocument3 paginiTest para Mecánicosluisemsa88% (8)
- Brochure QAS Range Spanish 2958 0440 44 PDFDocument12 paginiBrochure QAS Range Spanish 2958 0440 44 PDFLuis Alberto Perez ParedesÎncă nu există evaluări
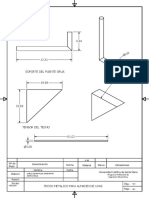
- Perno de AnclajeDocument1 paginăPerno de AnclajeLuis Alberto Perez ParedesÎncă nu există evaluări
- Geomet Olimpiadas AlbrechtDocument19 paginiGeomet Olimpiadas AlbrechtLUIZ ANTONIO PONCE ALONSOÎncă nu există evaluări
- Geomet Olimpiadas AlbrechtDocument19 paginiGeomet Olimpiadas AlbrechtLUIZ ANTONIO PONCE ALONSOÎncă nu există evaluări
- Brochure QAS Range Spanish 2958 0440 44 PDFDocument12 paginiBrochure QAS Range Spanish 2958 0440 44 PDFLuis Alberto Perez ParedesÎncă nu există evaluări
- PlacasDocument1 paginăPlacasLuis Alberto Perez ParedesÎncă nu există evaluări
- Modelo de Curriculum 2017Document2 paginiModelo de Curriculum 2017MARIA ALANOCAÎncă nu există evaluări
- Gel ReductorDocument33 paginiGel ReductorFreddy Negron HuamaniÎncă nu există evaluări
- Ac-Es Ecologica Su InstalacionDocument5 paginiAc-Es Ecologica Su InstalacionMarcelo LZÎncă nu există evaluări
- Alquiler Mujeres 2019Document35 paginiAlquiler Mujeres 2019Luis Alberto Perez ParedesÎncă nu există evaluări
- Interfere Nci ADocument5 paginiInterfere Nci AFederico FernándezÎncă nu există evaluări
- Ion Tecnica - Deteccion y Filtrado de ArmonicosDocument43 paginiIon Tecnica - Deteccion y Filtrado de ArmonicosglopezchÎncă nu există evaluări
- MTBF Calculo RodamientosDocument11 paginiMTBF Calculo RodamientosseoanemercadoÎncă nu există evaluări
- Analisis de Los Modelos de TransformadorDocument11 paginiAnalisis de Los Modelos de TransformadorAlejandro Pedro Mundaca MalcaÎncă nu există evaluări
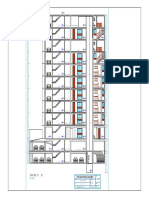
- Edificio de 10 NivelesDocument1 paginăEdificio de 10 NivelesLuis Alberto Perez ParedesÎncă nu există evaluări
- Alquiler Mujeres 2019Document35 paginiAlquiler Mujeres 2019Luis Alberto Perez ParedesÎncă nu există evaluări
- Interfere Nci ADocument5 paginiInterfere Nci AFederico FernándezÎncă nu există evaluări
- Tutorial N40 2011Document37 paginiTutorial N40 2011Iván Köhler AÎncă nu există evaluări
- Tutorial N40 2011Document37 paginiTutorial N40 2011Iván Köhler AÎncă nu există evaluări
- Conclusion EsDocument10 paginiConclusion EsLuis Alberto Perez ParedesÎncă nu există evaluări
- Parte 3 FinalDocument7 paginiParte 3 FinalLuis Alberto Perez ParedesÎncă nu există evaluări
- Ejercicios de AmplificadoresDocument35 paginiEjercicios de AmplificadoresMafer Riascos Cisneros100% (2)
- Articulo PerioDocument11 paginiArticulo PerioLuis Alberto Perez ParedesÎncă nu există evaluări
- LAB 10 Inversión MOT3F.desbloqueadoDocument3 paginiLAB 10 Inversión MOT3F.desbloqueadoAndree Gutierrez Suclla100% (1)
- Normas de SeguridadDocument5 paginiNormas de SeguridadLuis Alberto Perez ParedesÎncă nu există evaluări
- Horario Con ClasesDocument1 paginăHorario Con ClasesLuis Alberto Perez ParedesÎncă nu există evaluări
- Diseno de Controladores Digitales Utilizando Metodos AnalogicosDocument24 paginiDiseno de Controladores Digitales Utilizando Metodos AnalogicosFaider Humberto Barrero SanchezÎncă nu există evaluări
- Sim Mec Planos MatlabDocument6 paginiSim Mec Planos MatlabLuis Alberto Perez ParedesÎncă nu există evaluări