S-ar putea să vă placă și
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDe la EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsEvaluare: 3.5 din 5 stele3.5/5 (6)
- SICON-4000LKZi in English (101018)Document114 paginiSICON-4000LKZi in English (101018)Nadeem KhanÎncă nu există evaluări
- IEEE STD C57.98-1993 - IEEE Guide For Transformer Impulse Tests.Document59 paginiIEEE STD C57.98-1993 - IEEE Guide For Transformer Impulse Tests.anand_girgaonkar100% (1)
- Gravimetric FeederDocument47 paginiGravimetric FeederYousuf Ali67% (3)
- S Parameter BasicsDocument20 paginiS Parameter BasicsMihailÎncă nu există evaluări
- Analog Circuit Design Volume Three: Design Note CollectionDe la EverandAnalog Circuit Design Volume Three: Design Note CollectionEvaluare: 3 din 5 stele3/5 (2)
- 3 Axis TB6600 CNC Driver Board Users ManualDocument10 pagini3 Axis TB6600 CNC Driver Board Users Manualalvarnal100% (2)
- Microchip Motor ControlDocument16 paginiMicrochip Motor ControlOctavio AsÎncă nu există evaluări
- 3 Phase Motor DriverDocument6 pagini3 Phase Motor DriverIon MoldoveanuÎncă nu există evaluări
- Power and Distribution TransformersDocument32 paginiPower and Distribution TransformersŽeljkoMarković50% (2)
- Voltage To Frequency ConverterDocument7 paginiVoltage To Frequency ConverterRodfer SorianoÎncă nu există evaluări
- Baluns - Choosing The Correct Balun by Tom, W8JI ... - DX Engineering - 2Document22 paginiBaluns - Choosing The Correct Balun by Tom, W8JI ... - DX Engineering - 2Bảo BìnhÎncă nu există evaluări
- SCADADocument57 paginiSCADAkailasamvv100% (1)
- CNC Shield For A4988Document7 paginiCNC Shield For A4988vaxewiÎncă nu există evaluări
- Solar-Wind Hybrid System PresentsDocument11 paginiSolar-Wind Hybrid System Presentsprafulla100% (1)
- BeneView T8 Service ManualDocument192 paginiBeneView T8 Service ManualbmjuberÎncă nu există evaluări
- Using The MC3PHAC Motor Controller: Application NoteDocument50 paginiUsing The MC3PHAC Motor Controller: Application NoteBarba LuisÎncă nu există evaluări
- Railway Accident Monitoring System: A Project Report ONDocument13 paginiRailway Accident Monitoring System: A Project Report ONPrateek SrivastavÎncă nu există evaluări
- 73M2921 Advanced Single Chip Modem: Description FeaturesDocument42 pagini73M2921 Advanced Single Chip Modem: Description FeaturesRicardo MercadoÎncă nu există evaluări
- Arm Cortex (LPC 2148) Based Motor Speed ControlDocument25 paginiArm Cortex (LPC 2148) Based Motor Speed ControlUday Wankar100% (1)
- 00718a - Brush-DC Servomotor Implementation Using PIC17C756ADocument33 pagini00718a - Brush-DC Servomotor Implementation Using PIC17C756AadisaksÎncă nu există evaluări
- Vehicle Speed Control Using RF CommunicationDocument20 paginiVehicle Speed Control Using RF CommunicationRaina John100% (2)
- A4988 DatasheetDocument20 paginiA4988 DatasheetJose OnoÎncă nu există evaluări
- A4989 DatasheetDocument17 paginiA4989 DatasheetGopalkrishnan Nadar100% (1)
- TWRKV46F150 PMSM SensorlessDocument22 paginiTWRKV46F150 PMSM Sensorlessb_dupÎncă nu există evaluări
- 217 3367 JaguarDatasheetDocument16 pagini217 3367 JaguarDatasheetYi Cong HuangÎncă nu există evaluări
- Thyristor Power Control by IR RemoteDocument22 paginiThyristor Power Control by IR Remotevivek100% (1)
- 3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingDocument12 pagini3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingPero01Încă nu există evaluări
- DRV 8811Document22 paginiDRV 8811nelson_loboÎncă nu există evaluări
- Microcontrollers and TRIAC-Based Dimmers-CD00003820Document11 paginiMicrocontrollers and TRIAC-Based Dimmers-CD00003820Dan EsentherÎncă nu există evaluări
- Description Power Range: Analog Servo DriveDocument7 paginiDescription Power Range: Analog Servo DriveElectromateÎncă nu există evaluări
- 3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80XDocument24 pagini3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80Xrutu_jnecÎncă nu există evaluări
- Description Power Range: Analog Servo DriveDocument7 paginiDescription Power Range: Analog Servo DriveElectromateÎncă nu există evaluări
- Programming Guide AQUADocument230 paginiProgramming Guide AQUADejan MihailovicÎncă nu există evaluări
- Description Power Range: Analog Servo DriveDocument7 paginiDescription Power Range: Analog Servo DriveElectromateÎncă nu există evaluări
- Developing Islanding Arrangement Automatically For Grid On Sensing Bad Voltage or FrequencyDocument29 paginiDeveloping Islanding Arrangement Automatically For Grid On Sensing Bad Voltage or FrequencyNitin AdamÎncă nu există evaluări
- A3979 DatasheetDocument15 paginiA3979 DatasheetИван КосмонавтÎncă nu există evaluări
- WIRE LESS Land Mine Detection Robo-VehicleDocument35 paginiWIRE LESS Land Mine Detection Robo-VehicleDebashish BeheraÎncă nu există evaluări
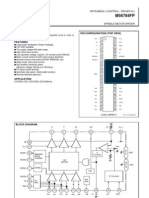
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 paginiMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoÎncă nu există evaluări
- Ac Voltage Controller Using Thyristor Project Report by SandeepDocument29 paginiAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- ADMC201Document15 paginiADMC201Ariana Ribeiro LameirinhasÎncă nu există evaluări
- Data SheetDocument9 paginiData SheetLesseigne Marie-ClaireÎncă nu există evaluări
- TLC 59116 FDocument33 paginiTLC 59116 FhfuishÎncă nu există evaluări
- A 4983Document16 paginiA 4983Boreal3000Încă nu există evaluări
- Advanced Three Phase PWM Inverter Control Using MicrocontrollerDocument8 paginiAdvanced Three Phase PWM Inverter Control Using MicrocontrollerAbdur Rehman TayyabÎncă nu există evaluări
- MP3389 r1.04Document16 paginiMP3389 r1.04Andres Alegria100% (1)
- DRV8305 - 3F Gate DR W-Current SH Amp & VDRDocument54 paginiDRV8305 - 3F Gate DR W-Current SH Amp & VDRarturoncÎncă nu există evaluări
- FRC Jaguar Datasheet PDFDocument16 paginiFRC Jaguar Datasheet PDFJuan de Dios Alardín HernándezÎncă nu există evaluări
- Nonvolatile Memory 8-Kbit E Prom With C Bus Interface SDA 2586-5Document12 paginiNonvolatile Memory 8-Kbit E Prom With C Bus Interface SDA 2586-5insomnium86Încă nu există evaluări
- User Manual For Speed Control of BLDC Motor Using DspicDocument12 paginiUser Manual For Speed Control of BLDC Motor Using DspicTrung TrựcÎncă nu există evaluări
- Pic Servo SCDocument51 paginiPic Servo SCFvck Ccp100% (1)
- Vehicle Speed Control System Using RF CommunicationDocument80 paginiVehicle Speed Control System Using RF CommunicationSaheb Amrinder100% (6)
- 3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80XDocument24 pagini3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80Xjulio100% (1)
- Microchip MCP7940M Low Cost I2C Real Time Clock Calendar With SRAMDocument39 paginiMicrochip MCP7940M Low Cost I2C Real Time Clock Calendar With SRAM邱子威Încă nu există evaluări
- Chapter Three2Document12 paginiChapter Three2Fuh ValleryÎncă nu există evaluări
- Fan 7314Document14 paginiFan 7314Kamal NonekÎncă nu există evaluări
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosDocument24 paginiNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierÎncă nu există evaluări
- Elemento de Flujo TVTHILL1Document50 paginiElemento de Flujo TVTHILL1Rafael Martin Anaya FigueroaÎncă nu există evaluări
- The Drive Design of The STM32-based Brushless DC Motor: Song Wang, Wang Guo, Wenqiang DunDocument9 paginiThe Drive Design of The STM32-based Brushless DC Motor: Song Wang, Wang Guo, Wenqiang DunMarco LisiÎncă nu există evaluări
- At91sam7s64 DsDocument491 paginiAt91sam7s64 DsLord_JoelÎncă nu există evaluări
- 3-Phase Sensorless BLDC Motor Control Development Kit With MC9S12G128 MCUDocument40 pagini3-Phase Sensorless BLDC Motor Control Development Kit With MC9S12G128 MCUBogdan CosteaÎncă nu există evaluări
- MDCC-T30 0 11Document7 paginiMDCC-T30 0 11darrylcarvalhoÎncă nu există evaluări
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 paginiChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielÎncă nu există evaluări
- Power Systems-On-Chip: Practical Aspects of DesignDe la EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardÎncă nu există evaluări
- Video 17 PDFDocument5 paginiVideo 17 PDFBảo BìnhÎncă nu există evaluări
- Panasonic Sr-jhs18-Nsd Rice Cooker SMDocument42 paginiPanasonic Sr-jhs18-Nsd Rice Cooker SMBảo BìnhÎncă nu există evaluări
- ICE User Guide - 001-44612 PDFDocument22 paginiICE User Guide - 001-44612 PDFBảo BìnhÎncă nu există evaluări
- PF0030 Series: MOS FET Power AmplifierDocument20 paginiPF0030 Series: MOS FET Power AmplifierBảo BìnhÎncă nu există evaluări
- AN980 MotorolaDocument15 paginiAN980 MotorolaBảo BìnhÎncă nu există evaluări
- 12711883Document32 pagini12711883Bảo BìnhÎncă nu există evaluări
- Rangkaian Pemancar Dengan MOSFETDocument20 paginiRangkaian Pemancar Dengan MOSFETBambang SujanarkoÎncă nu există evaluări
- PF0030 Series: MOS FET Power AmplifierDocument20 paginiPF0030 Series: MOS FET Power AmplifierBảo BìnhÎncă nu există evaluări
- SEMICONDUCTOR TECHNICAL DATA FOR MC145190/MC145191 SYNTHESIZERSDocument25 paginiSEMICONDUCTOR TECHNICAL DATA FOR MC145190/MC145191 SYNTHESIZERSBảo BìnhÎncă nu există evaluări
- PM2111Document4 paginiPM2111Bảo BìnhÎncă nu există evaluări
- Acom SchematicDocument1 paginăAcom SchematicBảo Bình100% (1)
- A63 Sma63Document3 paginiA63 Sma63Bảo BìnhÎncă nu există evaluări
- cd4093bc 3 PDFDocument8 paginicd4093bc 3 PDFBảo BìnhÎncă nu există evaluări
- Transformers How They Measure ThemDocument16 paginiTransformers How They Measure ThemAnonymous 0wJgmKÎncă nu există evaluări
- Underhill Lewis 1973 2Document2 paginiUnderhill Lewis 1973 2Bảo BìnhÎncă nu există evaluări
- Tesla Bm240 Frekvencia ModulatorDocument8 paginiTesla Bm240 Frekvencia ModulatorBảo BìnhÎncă nu există evaluări
- 100w Mosfet-Power-Amplifier SCH PDFDocument9 pagini100w Mosfet-Power-Amplifier SCH PDFBảo BìnhÎncă nu există evaluări
- Si4721 PropertiesDocument10 paginiSi4721 PropertiesBảo BìnhÎncă nu există evaluări
- AN1705Document12 paginiAN1705Nikhil DixitÎncă nu există evaluări
- Small Signal RF-VHF-UHF TransistorDocument1 paginăSmall Signal RF-VHF-UHF TransistorBảo BìnhÎncă nu există evaluări
- Amplifiers Module 01Document26 paginiAmplifiers Module 01Sathish BalaÎncă nu există evaluări
- Hello PdeDocument3 paginiHello PdeBảo Bình100% (1)
- 5 1smsig MSG PDFDocument43 pagini5 1smsig MSG PDFBảo BìnhÎncă nu există evaluări
- United States Patent: Smyth Et Al. (45) Date of Patent: Feb. 24, 2004Document7 paginiUnited States Patent: Smyth Et Al. (45) Date of Patent: Feb. 24, 2004Bảo BìnhÎncă nu există evaluări
- Motorola GM Series ControllerDocument26 paginiMotorola GM Series ControllerBảo Bình100% (1)
- ADC Port CCS Compiler - PpsDocument5 paginiADC Port CCS Compiler - PpsBảo Bình100% (1)
- Video 17 PDFDocument5 paginiVideo 17 PDFBảo BìnhÎncă nu există evaluări
- Carrier HeatingDocument173 paginiCarrier HeatingUNIQUE0% (1)
- Snat Catalogue 8 27-1Document20 paginiSnat Catalogue 8 27-1Shane WestÎncă nu există evaluări
- Workhorse 300s ManualDocument38 paginiWorkhorse 300s ManualkennyÎncă nu există evaluări
- Homework #8 November 4, 2005Document3 paginiHomework #8 November 4, 2005Asmaa WajeahÎncă nu există evaluări
- Eura E800 ManualDocument68 paginiEura E800 ManualOgnjen Banjac100% (1)
- L1408T EqpcchxDocument11 paginiL1408T Eqpcchxmarjorie vargas castroÎncă nu există evaluări
- Thermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuDocument3 paginiThermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuerpublicationÎncă nu există evaluări
- Optimal Grid Connected InverterDocument83 paginiOptimal Grid Connected Inverterashraf-84Încă nu există evaluări
- How To Build Your Own Uninterruptible Power SupplyDocument17 paginiHow To Build Your Own Uninterruptible Power Supplymaster chibukingÎncă nu există evaluări
- EE8353 Electrical Drives and Control Question BankDocument13 paginiEE8353 Electrical Drives and Control Question BankAbuthalifÎncă nu există evaluări
- En PVS800 FW Manual C A4 Update Notice-1Document186 paginiEn PVS800 FW Manual C A4 Update Notice-1Battinapati ShivaÎncă nu există evaluări
- Honda DTC Codes PDFDocument12 paginiHonda DTC Codes PDFDennis JaramilloÎncă nu există evaluări
- EMERSON Output Short-Circuit Current Bearable by The UPSDocument8 paginiEMERSON Output Short-Circuit Current Bearable by The UPSjiaomaÎncă nu există evaluări
- Manual - Phoenix Inverter 180 350 - Rev 04 - en NL FR de ESDocument48 paginiManual - Phoenix Inverter 180 350 - Rev 04 - en NL FR de ESLody RiemersmaÎncă nu există evaluări
- Krest EEE Mini ProjectsDocument6 paginiKrest EEE Mini ProjectsAtul KumarÎncă nu există evaluări
- Insulation Resistance (Riso) Threshold Formula for Large PV PlantsDocument5 paginiInsulation Resistance (Riso) Threshold Formula for Large PV PlantsOmar UrreaÎncă nu există evaluări
- Ews 1021Document24 paginiEws 1021MilanÎncă nu există evaluări
- SMA Central Inverter 1000kVADocument4 paginiSMA Central Inverter 1000kVAATS d.o.o. SarajevoÎncă nu există evaluări
- SOLAREDGE P Series Commercial Add On Frame Mounted Power Optimizer DatasheetDocument2 paginiSOLAREDGE P Series Commercial Add On Frame Mounted Power Optimizer DatasheetMaisa LuanaÎncă nu există evaluări
- Desafio UHVDCDocument7 paginiDesafio UHVDCAlfonso Peralta DíazÎncă nu există evaluări
- Electric Machines and Power ElectronicsDocument58 paginiElectric Machines and Power ElectronicsMuhammad Faraz100% (1)
- Off-Grid PV Inverters: Essensolar & Expert SeriesDocument5 paginiOff-Grid PV Inverters: Essensolar & Expert Seriesgkhjlk klÎncă nu există evaluări
- Simulation and Comparison of SPWM and SVPWM Techniques for InvertersDocument6 paginiSimulation and Comparison of SPWM and SVPWM Techniques for InvertersIkram RidhoÎncă nu există evaluări
- Versati 3 Split Service Manual MinDocument155 paginiVersati 3 Split Service Manual MinPatrick HorsfieldÎncă nu există evaluări
- HTM1500 at 600 VAC Data SheetDocument2 paginiHTM1500 at 600 VAC Data SheetAlegil90Încă nu există evaluări