S-ar putea să vă placă și
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYDe la EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYÎncă nu există evaluări
- Analytic Geometry: Graphic Solutions Using Matlab LanguageDe la EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageÎncă nu există evaluări
- Structural Analysis and ControlDocument24 paginiStructural Analysis and ControlkktttÎncă nu există evaluări
- Exam - 2012 10 30Document5 paginiExam - 2012 10 30lieth-4Încă nu există evaluări
- Multivariable Calculus, 2009-10-30. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 paginiMultivariable Calculus, 2009-10-30. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4Încă nu există evaluări
- Engineering Mathematics Formula SheetDocument2 paginiEngineering Mathematics Formula Sheetsimpsonequal100% (1)
- Multivariable Calculus, 2008-10-31. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 paginiMultivariable Calculus, 2008-10-31. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4Încă nu există evaluări
- Exam - 2011 10 28Document5 paginiExam - 2011 10 28lieth-4Încă nu există evaluări
- Multivariable Calculus, 2007-03-15. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 paginiMultivariable Calculus, 2007-03-15. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4Încă nu există evaluări
- Exam Formulas For CALCULUSDocument3 paginiExam Formulas For CALCULUSWendy HuynhÎncă nu există evaluări
- Tpde Unit Iii PDFDocument31 paginiTpde Unit Iii PDFSÎncă nu există evaluări
- Exam - 2013 10 30Document5 paginiExam - 2013 10 30lieth-4Încă nu există evaluări
- Answers 2009-10Document19 paginiAnswers 2009-10Yoga RasiahÎncă nu există evaluări
- Essential Formulae: Number and AlgebraDocument7 paginiEssential Formulae: Number and AlgebraShinigami01001Încă nu există evaluări
- AP Calc AB/BC Review SheetDocument2 paginiAP Calc AB/BC Review Sheetmhayolo69100% (1)
- Multivariable Calculus, 2007-10-26. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 paginiMultivariable Calculus, 2007-10-26. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4Încă nu există evaluări
- Integrals: Definitions Definite Integral: Suppose Anti-Derivative: An Anti-Derivative ofDocument5 paginiIntegrals: Definitions Definite Integral: Suppose Anti-Derivative: An Anti-Derivative ofuditagarwal1997Încă nu există evaluări
- Calculus Cheat Sheet IntegralsDocument5 paginiCalculus Cheat Sheet Integralsapi-322359712Încă nu există evaluări
- A-Math Formula List - Additional Math (4047) Updated 6th Apr 2015 PDFDocument12 paginiA-Math Formula List - Additional Math (4047) Updated 6th Apr 2015 PDFilluminatehÎncă nu există evaluări
- Calculus Cheat Sheet Integrals ReducedDocument3 paginiCalculus Cheat Sheet Integrals ReducedShahnaz GazalÎncă nu există evaluări
- M 4u IntegrationDocument14 paginiM 4u IntegrationTrungVo369Încă nu există evaluări
- Calculus Made Ridiculusly EasyDocument250 paginiCalculus Made Ridiculusly Easyiamsandesh89% (9)
- Prof. Connor Section 5: Non-Linear Analysis of Members 5.1 Deformation AnalysisDocument17 paginiProf. Connor Section 5: Non-Linear Analysis of Members 5.1 Deformation AnalysisAmmar A. AliÎncă nu există evaluări
- Biotech All Subject Question Part A B C Odd Iii Sem 2019 20Document318 paginiBiotech All Subject Question Part A B C Odd Iii Sem 2019 20apoorva singhÎncă nu există evaluări
- 9 Integrals PDFDocument19 pagini9 Integrals PDFthinkiitÎncă nu există evaluări
- Integral CalculusDocument68 paginiIntegral CalculusRichmond Abriol Santos100% (2)
- Calculus 2 SummaryDocument2 paginiCalculus 2 Summarydukefvr41Încă nu există evaluări
- Text Book: Barrante, 3rd, 2004.: Applied Mathematics For Physical ChemistryDocument38 paginiText Book: Barrante, 3rd, 2004.: Applied Mathematics For Physical ChemistryTzung-Ying YangÎncă nu există evaluări
- SPM Add Maths Formula List Form4 PDFDocument16 paginiSPM Add Maths Formula List Form4 PDFNicholas Rogers80% (5)
- Person Note Document For Multivariable CalculusDocument2 paginiPerson Note Document For Multivariable CalculusImcomingforyouÎncă nu există evaluări
- Basic Calculus FormulaeDocument4 paginiBasic Calculus FormulaeAkshay Singh RajputÎncă nu există evaluări
- Math 20C NotesDocument2 paginiMath 20C NotesLolhiThereÎncă nu există evaluări
- Math ReferenceDocument24 paginiMath ReferenceSujib BarmanÎncă nu există evaluări
- LGRCB Im Ch17Document102 paginiLGRCB Im Ch17Nguyễn Phượng NhiÎncă nu există evaluări
- Formula Rio CNDocument6 paginiFormula Rio CNFabio Miguel RodriguesÎncă nu există evaluări
- Additional Mathematics - List of Formulae (Form 4)Document19 paginiAdditional Mathematics - List of Formulae (Form 4)Syazleen Nabilah AkmalÎncă nu există evaluări
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDe la EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesÎncă nu există evaluări
- Tables of Weber Functions: Mathematical Tables, Vol. 1De la EverandTables of Weber Functions: Mathematical Tables, Vol. 1Încă nu există evaluări
- Real Analysis and Probability: Solutions to ProblemsDe la EverandReal Analysis and Probability: Solutions to ProblemsÎncă nu există evaluări
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsDe la EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsÎncă nu există evaluări
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankDe la EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankÎncă nu există evaluări
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27De la EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Încă nu există evaluări
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsDe la EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsEvaluare: 5 din 5 stele5/5 (1)
- Differentiation (Calculus) Mathematics Question BankDe la EverandDifferentiation (Calculus) Mathematics Question BankEvaluare: 4 din 5 stele4/5 (1)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesDe la EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesEvaluare: 1.5 din 5 stele1.5/5 (2)
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesDe la EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesÎncă nu există evaluări
- Transformation of Axes (Geometry) Mathematics Question BankDe la EverandTransformation of Axes (Geometry) Mathematics Question BankEvaluare: 3 din 5 stele3/5 (1)
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsDe la EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsEvaluare: 5 din 5 stele5/5 (1)
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianDe la EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianEvaluare: 5 din 5 stele5/5 (1)
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)De la EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Încă nu există evaluări
- Mathematical Tables: Tables of in G [z] for Complex ArgumentDe la EverandMathematical Tables: Tables of in G [z] for Complex ArgumentÎncă nu există evaluări
- Comparative Study of Cement Concrete and Geopolymer Masonry BlocksDocument5 paginiComparative Study of Cement Concrete and Geopolymer Masonry BlocksManishDasÎncă nu există evaluări
- 12oct Dec sf1 PDFDocument6 pagini12oct Dec sf1 PDFManishDasÎncă nu există evaluări
- FP - Specification and Use of Geopolymer Concrete PDFDocument12 paginiFP - Specification and Use of Geopolymer Concrete PDFManishDas100% (1)
- 05 Bakri PDFDocument8 pagini05 Bakri PDFManishDasÎncă nu există evaluări
- HR Interview QuestionDocument17 paginiHR Interview Questionanon-351969Încă nu există evaluări
- PDF Dis StandardsDocument35 paginiPDF Dis StandardsEdén PastoraÎncă nu există evaluări
- Using SystemVerilog Assertions in RTL CodeDocument6 paginiUsing SystemVerilog Assertions in RTL CodeHardik TrivediÎncă nu există evaluări
- Concept of ERS in SAP MMDocument9 paginiConcept of ERS in SAP MMARABINDA CHAKRAVARTYÎncă nu există evaluări
- 4526 R430 01Document256 pagini4526 R430 01nasiruddin276100% (1)
- Huawei OMC IManager M2000 Engineering Parameters IntroductionDocument11 paginiHuawei OMC IManager M2000 Engineering Parameters IntroductionaricomenÎncă nu există evaluări
- Programming Assignment Unit 6 1Document13 paginiProgramming Assignment Unit 6 1Majd HaddadÎncă nu există evaluări
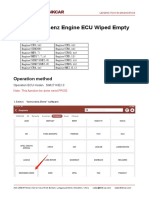
- Mercedes Benz Engine ECU Wiped EmptyDocument9 paginiMercedes Benz Engine ECU Wiped EmptyP BÎncă nu există evaluări
- 651R PF00295Document12 pagini651R PF00295intrudentalertÎncă nu există evaluări
- Autocad Lab ManualDocument2 paginiAutocad Lab ManualriyaÎncă nu există evaluări
- Ip Profiling SytemDocument72 paginiIp Profiling Sytemjohnraymart colasitoÎncă nu există evaluări
- Tomorrow'S Technology For Today'S Security: Product HighlightsDocument2 paginiTomorrow'S Technology For Today'S Security: Product HighlightsBanu AtamÎncă nu există evaluări
- Mecapion Servo Motors 2012Document68 paginiMecapion Servo Motors 2012GianLucaÎncă nu există evaluări
- DatasheetDurem114 tcm40-2080Document1 paginăDatasheetDurem114 tcm40-2080Gildardo FigueroaÎncă nu există evaluări
- Optimal Design of Cryogenic Air Separation Columns Under UncertaintyDocument29 paginiOptimal Design of Cryogenic Air Separation Columns Under UncertaintyMichael SherriffÎncă nu există evaluări
- 5 - Signal Flow Graphs Masons RuleDocument19 pagini5 - Signal Flow Graphs Masons RuleMGR fanÎncă nu există evaluări
- CA Tut14 ANSDocument2 paginiCA Tut14 ANSTamizharasan P SÎncă nu există evaluări
- Business Statistics: Communicating With Numbers: by Sanjiv Jaggia and Alison KellyDocument33 paginiBusiness Statistics: Communicating With Numbers: by Sanjiv Jaggia and Alison KellySinta DewiÎncă nu există evaluări
- WSO - Info July JuneDocument8 paginiWSO - Info July JuneVõ Đặng TrọngÎncă nu există evaluări
- Pascal Ehimare,: Popm, AsmDocument2 paginiPascal Ehimare,: Popm, AsmharshÎncă nu există evaluări
- Mathematical Induction: CS/APMA 202 Rosen Section 3.3 Aaron BloomfieldDocument43 paginiMathematical Induction: CS/APMA 202 Rosen Section 3.3 Aaron BloomfieldJovit Rejas AleriaÎncă nu există evaluări
- LC-3 Assembly LanguageDocument18 paginiLC-3 Assembly LanguageElad TalicÎncă nu există evaluări
- DE4Document18 paginiDE4AdrianzzzzÎncă nu există evaluări
- cs2201 Unit1 Notes PDFDocument16 paginics2201 Unit1 Notes PDFBal BolakaÎncă nu există evaluări
- Napolcom MC 2019-007Document3 paginiNapolcom MC 2019-007Edward MagatÎncă nu există evaluări
- 80X0DXDocument33 pagini80X0DXFauzan AhmadÎncă nu există evaluări
- Forge-Data LogDocument295 paginiForge-Data LogDonnieÎncă nu există evaluări
- Ai ExplanationsDocument3 paginiAi Explanationskathlyne BarcenaÎncă nu există evaluări
- Let's Learn About SpreadsheetsDocument48 paginiLet's Learn About SpreadsheetsHiltanasÎncă nu există evaluări
- How To Use 6211Document23 paginiHow To Use 6211ahmed4665Încă nu există evaluări



























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1714993295?v=1)