S-ar putea să vă placă și
- WSRC - Ms.934) 37: .Ois'Rrtbut1Onof: Lr.4:S Docu - ,,jeittkt.. Ui/Tlih4Rrel.Document12 paginiWSRC - Ms.934) 37: .Ois'Rrtbut1Onof: Lr.4:S Docu - ,,jeittkt.. Ui/Tlih4Rrel.Yutt WattÎncă nu există evaluări
- KUKEN closed-type-KKDocument5 paginiKUKEN closed-type-KKYutt WattÎncă nu există evaluări
- CAPREO Freehub: 9-SpeedDocument1 paginăCAPREO Freehub: 9-SpeedYutt WattÎncă nu există evaluări
- SelectRT Coils 2023-02-07Document2 paginiSelectRT Coils 2023-02-07Yutt WattÎncă nu există evaluări
- COLMAC Iom-Arevaporators-Eng00014424Document38 paginiCOLMAC Iom-Arevaporators-Eng00014424Yutt WattÎncă nu există evaluări
- Balmor Al Tanks: Epoxy Coated Steel TanksDocument12 paginiBalmor Al Tanks: Epoxy Coated Steel TanksYutt WattÎncă nu există evaluări
- K Flex Calculation Based On Ambient Temperature 30 C RH 75 H 11 FinalDocument1 paginăK Flex Calculation Based On Ambient Temperature 30 C RH 75 H 11 FinalYutt WattÎncă nu există evaluări
- Large Unit Cooler Evaporator: Technical GuideDocument64 paginiLarge Unit Cooler Evaporator: Technical GuideYutt WattÎncă nu există evaluări
- MeterDocument81 paginiMeterYutt WattÎncă nu există evaluări
- EFUSION O&M ManualDocument8 paginiEFUSION O&M ManualYutt WattÎncă nu există evaluări
- Dreyer Analysis 1988Document349 paginiDreyer Analysis 1988Yutt WattÎncă nu există evaluări
- Wtbc70 Roll in Blast ChillerDocument2 paginiWtbc70 Roll in Blast ChillerYutt WattÎncă nu există evaluări
- มอเตอร์บาดาล Franklin ElectricDocument20 paginiมอเตอร์บาดาล Franklin ElectricYutt WattÎncă nu există evaluări
- Microcool Fog Systems: Microcool Ibex Pump RangeDocument2 paginiMicrocool Fog Systems: Microcool Ibex Pump RangeYutt WattÎncă nu există evaluări
- KPS180SFLSB - Gram Process Kps Blast Chillers and Freezers Operating InstructionsDocument33 paginiKPS180SFLSB - Gram Process Kps Blast Chillers and Freezers Operating InstructionsYutt WattÎncă nu există evaluări
- Itoham - Betagro Joint-Venture Business PlanDocument17 paginiItoham - Betagro Joint-Venture Business PlanYutt WattÎncă nu există evaluări
- 2020 Basic Maintenence DanfossDocument36 pagini2020 Basic Maintenence DanfossYutt WattÎncă nu există evaluări
- Refrigerant Inventory TechNoteDocument36 paginiRefrigerant Inventory TechNoteYutt WattÎncă nu există evaluări
- EN - DA 1700 Wall Fan MPR 20190722Document12 paginiEN - DA 1700 Wall Fan MPR 20190722Yutt WattÎncă nu există evaluări
- Final CSB CaseStudy Millard 0114 0543PMDocument15 paginiFinal CSB CaseStudy Millard 0114 0543PMYutt WattÎncă nu există evaluări
- Friedrich Blast Chiller: N U - M E at T E C H N O Lo Gy - N U - M E At.C O M - 9 0 8 - 7 5 4 - 3 4 0 0Document4 paginiFriedrich Blast Chiller: N U - M E at T E C H N O Lo Gy - N U - M E At.C O M - 9 0 8 - 7 5 4 - 3 4 0 0Yutt WattÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Cic Tips Part 1&2Document27 paginiCic Tips Part 1&2Yousef AlalawiÎncă nu există evaluări
- TLE - IA - Carpentry Grades 7-10 CG 04.06.2014Document14 paginiTLE - IA - Carpentry Grades 7-10 CG 04.06.2014RickyJeciel100% (2)
- The Effectiveness of Risk Management: An Analysis of Project Risk Planning Across Industries and CountriesDocument13 paginiThe Effectiveness of Risk Management: An Analysis of Project Risk Planning Across Industries and Countriesluisbmwm6Încă nu există evaluări
- Year 9 - Justrice System Civil LawDocument12 paginiYear 9 - Justrice System Civil Lawapi-301001591Încă nu există evaluări
- Ikea AnalysisDocument33 paginiIkea AnalysisVinod BridglalsinghÎncă nu există evaluări
- Working Capital ManagementDocument39 paginiWorking Capital ManagementRebelliousRascalÎncă nu există evaluări
- Agfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Document3 paginiAgfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Youness Ben TibariÎncă nu există evaluări
- MORIGINADocument7 paginiMORIGINAatishÎncă nu există evaluări
- MDOF (Multi Degre of FreedomDocument173 paginiMDOF (Multi Degre of FreedomRicky Ariyanto100% (1)
- Termination LetterDocument2 paginiTermination Letterultakam100% (1)
- Efs151 Parts ManualDocument78 paginiEfs151 Parts ManualRafael VanegasÎncă nu există evaluări
- 2.1 Components and General Features of Financial Statements (3114AFE)Document19 pagini2.1 Components and General Features of Financial Statements (3114AFE)WilsonÎncă nu există evaluări
- Sample Opposition To Motion To Strike Portions of Complaint in United States District CourtDocument2 paginiSample Opposition To Motion To Strike Portions of Complaint in United States District CourtStan Burman100% (1)
- Audit Certificate: (On Chartered Accountant Firm's Letter Head)Document3 paginiAudit Certificate: (On Chartered Accountant Firm's Letter Head)manjeet mishraÎncă nu există evaluări
- Recommended Practices For Developing An Industrial Control Systems Cybersecurity Incident Response CapabilityDocument49 paginiRecommended Practices For Developing An Industrial Control Systems Cybersecurity Incident Response CapabilityJohn DavisonÎncă nu există evaluări
- Unit 1Document3 paginiUnit 1beharenbÎncă nu există evaluări
- 1400 Service Manual2Document40 pagini1400 Service Manual2Gabriel Catanescu100% (1)
- Income Statement, Its Elements, Usefulness and LimitationsDocument5 paginiIncome Statement, Its Elements, Usefulness and LimitationsDipika tasfannum salamÎncă nu există evaluări
- CV Ovais MushtaqDocument4 paginiCV Ovais MushtaqiftiniaziÎncă nu există evaluări
- 5 Star Hotels in Portugal Leads 1Document9 pagini5 Star Hotels in Portugal Leads 1Zahed IqbalÎncă nu există evaluări
- Sample Annual BudgetDocument4 paginiSample Annual BudgetMary Ann B. GabucanÎncă nu există evaluări
- Hexoskin - Information For Researchers - 01 February 2023Document48 paginiHexoskin - Information For Researchers - 01 February 2023emrecan cincanÎncă nu există evaluări
- Ingles Avanzado 1 Trabajo FinalDocument4 paginiIngles Avanzado 1 Trabajo FinalFrancis GarciaÎncă nu există evaluări
- Shubham RBSEDocument13 paginiShubham RBSEShubham Singh RathoreÎncă nu există evaluări
- Dialog Suntel MergerDocument8 paginiDialog Suntel MergerPrasad DilrukshanaÎncă nu există evaluări
- DesalinationDocument4 paginiDesalinationsivasu1980aÎncă nu există evaluări
- Fidp ResearchDocument3 paginiFidp ResearchIn SanityÎncă nu există evaluări
- CNC USB English ManualDocument31 paginiCNC USB English ManualHarold Hernan MuñozÎncă nu există evaluări
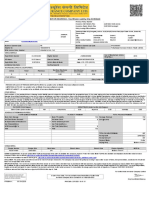
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDocument1 paginăMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VÎncă nu există evaluări
- Group 1 Disaster Management Notes by D. Malleswari ReddyDocument49 paginiGroup 1 Disaster Management Notes by D. Malleswari Reddyraghu ramÎncă nu există evaluări