S-ar putea să vă placă și
- Castiglianos Theorem GEREDocument14 paginiCastiglianos Theorem GEREpgp655484100% (2)
- Reinforced ConcreteDocument15 paginiReinforced ConcreteDenice Castro100% (1)
- Lateral Support For Tier Building FramesDocument4 paginiLateral Support For Tier Building Framesuhu_plus6482Încă nu există evaluări
- Coulomb Force Gizmo LabDocument6 paginiCoulomb Force Gizmo LabAgatha Marie Camarillo100% (1)
- Random VibrationsDocument20 paginiRandom VibrationsVivek PandeyÎncă nu există evaluări
- Water Tank Design As Per Moody ChartDocument20 paginiWater Tank Design As Per Moody ChartMukhlish AkhatarÎncă nu există evaluări
- Vibration AnalysisDocument18 paginiVibration AnalysisSangolla NarahariÎncă nu există evaluări
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11De la EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Încă nu există evaluări
- Science 9 - Q4 - Week 3Document23 paginiScience 9 - Q4 - Week 3Rhyan Zero-four BaluyutÎncă nu există evaluări
- Answers To Exam-Style Questions: Topic 10Document4 paginiAnswers To Exam-Style Questions: Topic 10Rahul HutariÎncă nu există evaluări
- Simple Harmonic MotionDocument7 paginiSimple Harmonic MotionRaju SinghÎncă nu există evaluări
- Test SokDocument14 paginiTest SokFirzan100% (5)
- Mech Eng 3028 Dynamics & Control II - Vibrations Assignment 1Document3 paginiMech Eng 3028 Dynamics & Control II - Vibrations Assignment 1ehsanzkr_499329029Încă nu există evaluări
- QUESTIONDocument15 paginiQUESTIONHammad SargurohÎncă nu există evaluări
- ME354A - Assignment 3Document4 paginiME354A - Assignment 3Ryan ArcherÎncă nu există evaluări
- X X X A T: MECH 364 Assignment 2Document9 paginiX X X A T: MECH 364 Assignment 2Chandra SekarÎncă nu există evaluări
- Tutorial + Correction Mechanical Vibration Chapter 3Document15 paginiTutorial + Correction Mechanical Vibration Chapter 3Mohammed Al HelaylÎncă nu există evaluări
- 2014 ExercisesDocument8 pagini2014 ExercisesElvir PecoÎncă nu există evaluări
- Ch03 Harmonically Excited Vibrations Part1 PDFDocument19 paginiCh03 Harmonically Excited Vibrations Part1 PDFIsfan Satriyo PramudaniÎncă nu există evaluări
- VibracionesDocument14 paginiVibracionesFernando LopezÎncă nu există evaluări
- ME72 Assignment QuestionsDocument6 paginiME72 Assignment QuestionsrahulÎncă nu există evaluări
- Mechanical Vibration Individual Assignment - I FinalDocument3 paginiMechanical Vibration Individual Assignment - I FinalBefikad BekeleÎncă nu există evaluări
- Ch2 1Document7 paginiCh2 1xmtqnkn8vjÎncă nu există evaluări
- 5826Document6 pagini5826zubbbuÎncă nu există evaluări
- 16 Marks TovDocument13 pagini16 Marks TovrenjithrenjuÎncă nu există evaluări
- Beam Experiment HandoutDocument10 paginiBeam Experiment HandoutArun KumarÎncă nu există evaluări
- ME7360 Assignment 1 PDFDocument3 paginiME7360 Assignment 1 PDFVivek V ShetÎncă nu există evaluări
- Module 2 Previous Year QuestionsDocument9 paginiModule 2 Previous Year QuestionsnikhilasoknÎncă nu există evaluări
- Sheet (1) : Free Oscillations (Simple Harmonic Motion) : T A T XDocument3 paginiSheet (1) : Free Oscillations (Simple Harmonic Motion) : T A T XMahmoud RamadanÎncă nu există evaluări
- Undamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringDocument3 paginiUndamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringSREENATH S.SÎncă nu există evaluări
- ENME361 Homework #4: 1. An Underdamped Single Degree-Of-Freedom System Is Travelling With A Velocity VDocument2 paginiENME361 Homework #4: 1. An Underdamped Single Degree-Of-Freedom System Is Travelling With A Velocity VmikeryuÎncă nu există evaluări
- Problems 15 Serway 6 eDocument16 paginiProblems 15 Serway 6 eAndre CVÎncă nu există evaluări
- DEC Mechanical Vibration Worksheet 1Document6 paginiDEC Mechanical Vibration Worksheet 1ephrembusiness2Încă nu există evaluări
- рисунки PDFDocument18 paginiрисунки PDFLeo KutsÎncă nu există evaluări
- Tutorial 3 Damping PDFDocument2 paginiTutorial 3 Damping PDFNidhija PillayÎncă nu există evaluări
- Ch03 - Harmonically Excited Vibrations - Part1Document19 paginiCh03 - Harmonically Excited Vibrations - Part1Khaled Reda67% (3)
- Step 1: Mathematical Modeling: 1 Vibration Analysis ProcedureDocument22 paginiStep 1: Mathematical Modeling: 1 Vibration Analysis ProcedureNirmal JayanthÎncă nu există evaluări
- ME313: Dynamics of Machinery: Sheet 4: Free Vibration ResponseDocument2 paginiME313: Dynamics of Machinery: Sheet 4: Free Vibration ResponsePrasanna RajagopalÎncă nu există evaluări
- CL708 - Earthquake Engineering - Tutorial 3Document1 paginăCL708 - Earthquake Engineering - Tutorial 3Rutvik ShethÎncă nu există evaluări
- Test SEM2 18-19 Questions PDFDocument2 paginiTest SEM2 18-19 Questions PDFAbdullah AlshihriÎncă nu există evaluări
- 2019 CE5320 Assignment 2Document2 pagini2019 CE5320 Assignment 2sayan mukherjee0% (1)
- CIE4145 2014 Assignments On Dynamics of SystemsDocument9 paginiCIE4145 2014 Assignments On Dynamics of SystemstimsykiÎncă nu există evaluări
- TUTORIAL 5 (Kinetics of RBs in Plane Motion)Document7 paginiTUTORIAL 5 (Kinetics of RBs in Plane Motion)Hareez FarhanÎncă nu există evaluări
- Practice Problems Set-3Document6 paginiPractice Problems Set-3ganeshÎncă nu există evaluări
- Chapter-2 Viscous DampingDocument32 paginiChapter-2 Viscous DampingMuhammad haider AyazÎncă nu există evaluări
- Maths SolutionDocument6 paginiMaths Solutionskarul36Încă nu există evaluări
- ME 4060/5060 Machine Vibrations: Problem Set 2Document14 paginiME 4060/5060 Machine Vibrations: Problem Set 2dineshkateÎncă nu există evaluări
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDocument8 pagini5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyÎncă nu există evaluări
- Ejercicios Modeling of Dynamic Systems1Document6 paginiEjercicios Modeling of Dynamic Systems1J Jick PerSeiÎncă nu există evaluări
- Assignment 5 Due 4pm Oct. 14 2019Document3 paginiAssignment 5 Due 4pm Oct. 14 2019bobÎncă nu există evaluări
- Solved Problems in VibrationDocument57 paginiSolved Problems in VibrationRasikaPereraÎncă nu există evaluări
- Tutorial 8Document2 paginiTutorial 8fawwazfauzi2004Încă nu există evaluări
- Assignment - 2 ME354ADocument4 paginiAssignment - 2 ME354Aharsh gargÎncă nu există evaluări
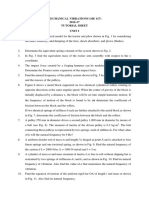
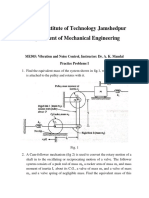
- ME34ME505 - Vibration and Noise ControlPractice Problems IDocument20 paginiME34ME505 - Vibration and Noise ControlPractice Problems IMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- Physics Simple Harmonic MotionDocument3 paginiPhysics Simple Harmonic MotionAhmed AshikÎncă nu există evaluări
- Chapter-6: Energy Method (Lagrange's Method)Document35 paginiChapter-6: Energy Method (Lagrange's Method)ideepujÎncă nu există evaluări
- Dynamicass 1Document2 paginiDynamicass 1Phanendra Kumar AttadaÎncă nu există evaluări
- Tutorial Problems: EI 294772.2 N.MDocument3 paginiTutorial Problems: EI 294772.2 N.MtannuÎncă nu există evaluări
- MV Assignment - 1Document1 paginăMV Assignment - 1Neeraj Goyal100% (1)
- Vibrations ExDocument1 paginăVibrations ExMuntoiaÎncă nu există evaluări
- Midsemester2017 Solved PDFDocument4 paginiMidsemester2017 Solved PDFHammad100% (1)
- Dynamics of Engineering Systems ENG432: Midsemester Test 2017Document4 paginiDynamics of Engineering Systems ENG432: Midsemester Test 2017HammadÎncă nu există evaluări
- I-Taalem Task - Chapter 8Document3 paginiI-Taalem Task - Chapter 8ruzaimi98Încă nu există evaluări
- Problemas de Vibraciones PDFDocument6 paginiProblemas de Vibraciones PDFKhristian VinicioÎncă nu există evaluări
- Semester One 2016 Examination Period Faculty of EngineeringDocument6 paginiSemester One 2016 Examination Period Faculty of EngineeringheinthetzawÎncă nu există evaluări
- ES224 01 Spring 2018 CourseContentDocument1 paginăES224 01 Spring 2018 CourseContentIskandar IskandarovÎncă nu există evaluări
- Introduction To Dynamics of MachineDocument82 paginiIntroduction To Dynamics of MachineKumar BabuÎncă nu există evaluări
- Interference and Superposition of WavesDocument4 paginiInterference and Superposition of WavescalikÎncă nu există evaluări
- Nonlinear Analysis of Cable Structures by PDFDocument7 paginiNonlinear Analysis of Cable Structures by PDFmorteza90Încă nu există evaluări
- Thermodynamic Property MethodsDocument23 paginiThermodynamic Property MethodsfarhaÎncă nu există evaluări
- Momentum Exchange Devices SlidesDocument42 paginiMomentum Exchange Devices SlidesAland BravoÎncă nu există evaluări
- A Comprehensive Comparison of Two-Fluid Model, Discrete ElementDocument23 paginiA Comprehensive Comparison of Two-Fluid Model, Discrete Elementเดชา อินทร์โท่โล่Încă nu există evaluări
- Week 8 - MechanicsDocument3 paginiWeek 8 - MechanicsRafael Jotojot Jr.Încă nu există evaluări
- NATS 1780 LabDocument6 paginiNATS 1780 LabAnitaHardingÎncă nu există evaluări
- Assessment of Soil-Pile-Structure Interaction Influencing Seismic Response of Mid-Rise Buildings Sitting On Floating Pile Foundations PDFDocument15 paginiAssessment of Soil-Pile-Structure Interaction Influencing Seismic Response of Mid-Rise Buildings Sitting On Floating Pile Foundations PDFIonut PatrasÎncă nu există evaluări
- Sistemas de Tuberías en Serie - Clase IDocument4 paginiSistemas de Tuberías en Serie - Clase IJair Andres Arevalo BanoyÎncă nu există evaluări
- 2019 USPAS Lecture 6Document37 pagini2019 USPAS Lecture 6MohsenÎncă nu există evaluări
- Experimento de Efecto Magnus - Curvatura de La Trayectoria de Una Bola en Caída LibreDocument4 paginiExperimento de Efecto Magnus - Curvatura de La Trayectoria de Una Bola en Caída Librevitevo56Încă nu există evaluări
- Testing Concrete ConstructionDocument10 paginiTesting Concrete ConstructionKaye Ibañez CastilloÎncă nu există evaluări
- This Study Resource Was: Submitted By: Engr. Ritchie ArdaniDocument3 paginiThis Study Resource Was: Submitted By: Engr. Ritchie ArdaniClint Baring ArranchadoÎncă nu există evaluări
- 2 Example From Mario Paz CANTIKDocument2 pagini2 Example From Mario Paz CANTIKMohd Noh RamanÎncă nu există evaluări
- Momentum and Impulse ReportDocument2 paginiMomentum and Impulse ReportDanÎncă nu există evaluări
- UNIT-2 AC Circuits NotesDocument35 paginiUNIT-2 AC Circuits NotesLatha Barla67% (3)
- Example 24.1. Determine The Maximum, Minimum and Average Pressure in A PlateDocument7 paginiExample 24.1. Determine The Maximum, Minimum and Average Pressure in A PlateFajar Pamungkas100% (1)
- Mechanical Engineering Science 1: Fluid Mechanics: Tutorial 7 - Hydrostatic ForcesDocument7 paginiMechanical Engineering Science 1: Fluid Mechanics: Tutorial 7 - Hydrostatic ForcesSabah MazoodÎncă nu există evaluări
- Effect of Grain Size On Mechanical Properties of MetalsDocument7 paginiEffect of Grain Size On Mechanical Properties of MetalsMuhannad MohammedÎncă nu există evaluări
- APL100Document2 paginiAPL100Kuldeep Mal0% (1)
- 2021 DSE Phy 1A - (E)Document16 pagini2021 DSE Phy 1A - (E)victorliwaitakÎncă nu există evaluări