S-ar putea să vă placă și
- Introduction to Power System ProtectionDe la EverandIntroduction to Power System ProtectionÎncă nu există evaluări
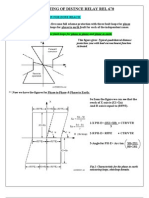
- 4-Doble-1 - R-X Diagram Distance RelayDocument7 pagini4-Doble-1 - R-X Diagram Distance RelaybillymcrealÎncă nu există evaluări
- Distance Protection: For Transmission Lines: Part 1 Gustav SteynbergDocument22 paginiDistance Protection: For Transmission Lines: Part 1 Gustav Steynberggnpr_10106080Încă nu există evaluări
- Testing Distance Functions Using Settings and WorksheetsDocument32 paginiTesting Distance Functions Using Settings and WorksheetsRajesh Bodduna75% (4)
- P433 Setting CalculationDocument11 paginiP433 Setting Calculationanon_143821310Încă nu există evaluări
- MiCOM Px3x Restricted Earth Fault Protection GuideDocument32 paginiMiCOM Px3x Restricted Earth Fault Protection GuideNima MahmoudpourÎncă nu există evaluări
- 33.DUOBIAS-M Relay TestingDocument75 pagini33.DUOBIAS-M Relay TestingTerezkaM100% (2)
- Symmetrical Componet Fauly CalculationDocument522 paginiSymmetrical Componet Fauly CalculationsreedharÎncă nu există evaluări
- ABB India Bangalore Bus Protection SessionDocument44 paginiABB India Bangalore Bus Protection SessionKasi viswanadh PÎncă nu există evaluări
- Line Protection Setting Guidelines PDFDocument468 paginiLine Protection Setting Guidelines PDFsathish100% (2)
- Protection Two Types Unit Non Unit Line Non Unit Type (Distance) Compare Unit Type Primary & Back - Up Protections Local Remote Zone of ProtectionDocument38 paginiProtection Two Types Unit Non Unit Line Non Unit Type (Distance) Compare Unit Type Primary & Back - Up Protections Local Remote Zone of ProtectionBhuvanes Waran100% (5)
- Line ProtectionDocument91 paginiLine Protectionhafiz_hazreen100% (1)
- Directional ProtectionDocument33 paginiDirectional ProtectionlrpatraÎncă nu există evaluări
- 8.line Distance ProtectionDocument76 pagini8.line Distance ProtectionMuruganantham Chandrappan100% (2)
- 7UM62 - Rotor Earth Fault ProtectionDocument26 pagini7UM62 - Rotor Earth Fault ProtectionfourwheelerÎncă nu există evaluări
- Unit-2-Distance & Differential ProtectionDocument167 paginiUnit-2-Distance & Differential Protectionsubbu2051100% (1)
- Principles of Protection by AREVA. 2008Document792 paginiPrinciples of Protection by AREVA. 2008hicham boutouche100% (7)
- Siprotec 5Document330 paginiSiprotec 5Belinda Wagner100% (1)
- 36.SEL-311L Differential Relay TestingDocument24 pagini36.SEL-311L Differential Relay Testingveeraboss100% (3)
- KBCH120 Relay Testing With F6150Document52 paginiKBCH120 Relay Testing With F6150TerezkaM100% (3)
- Power System Fault Analysis in 40 CharactersDocument147 paginiPower System Fault Analysis in 40 CharactersSyafrizal Syafrizal100% (1)
- Power ProtectionDocument30 paginiPower ProtectionmoosuhaibÎncă nu există evaluări
- Generator Protection: Technical InstituteDocument111 paginiGenerator Protection: Technical InstituteAndavilli Srihari Kumar50% (2)
- Direction Protection Seminar Analyzes Directional RelaysDocument27 paginiDirection Protection Seminar Analyzes Directional RelaysMarcus Figueroa100% (1)
- Transmission Line Distance ProtectionDocument60 paginiTransmission Line Distance Protectionmustafaayman6100% (1)
- Use of RX Diagram in Relaying-GEDocument26 paginiUse of RX Diagram in Relaying-GES Naved Masood100% (2)
- Differential Transformer Protection Using The SEL 387 and SEL 587 Microprocessor Relays PDFDocument109 paginiDifferential Transformer Protection Using The SEL 387 and SEL 587 Microprocessor Relays PDFHoang Tran The100% (4)
- Distance Protection Part 3Document93 paginiDistance Protection Part 3Homer Simp67% (3)
- Understanding Line Distance ProtectionDocument2 paginiUnderstanding Line Distance ProtectionRK KÎncă nu există evaluări
- One Case Study-Practical Protection Engineering BasicDocument4 paginiOne Case Study-Practical Protection Engineering BasicarsalanhamidÎncă nu există evaluări
- Basics of ProtectionDocument183 paginiBasics of Protectionsushmitha100% (1)
- Setting The Resistive Reach of Quadrilateral Characteristics o F Distance RelaysDocument5 paginiSetting The Resistive Reach of Quadrilateral Characteristics o F Distance RelaysSalvador ArcosÎncă nu există evaluări
- Protection Engineering and Research Laboratories: Session VII: Transformer ProtectionDocument105 paginiProtection Engineering and Research Laboratories: Session VII: Transformer Protectionsupermannon100% (8)
- 08-Presentation Distance ProtectionDocument73 pagini08-Presentation Distance ProtectionRajesh Pillai100% (3)
- Interlockingonswitchgearprinciples 151126195644 Lva1 App6892Document8 paginiInterlockingonswitchgearprinciples 151126195644 Lva1 App6892Dinesh Pitchaivel100% (1)
- Differential ProtectionDocument25 paginiDifferential ProtectionAkinbode Sunday Oluwagbenga100% (5)
- 03 Directional Over Current ProtectionDocument36 pagini03 Directional Over Current Protectionnabil160874Încă nu există evaluări
- REF ProtectionDocument13 paginiREF ProtectionSridhar Balakrishnan100% (4)
- Transmission Line ProtectionDocument31 paginiTransmission Line ProtectionJai Gupta100% (1)
- 04-Presentation Analysis of FaultsDocument94 pagini04-Presentation Analysis of FaultsRajesh Pillai100% (1)
- Overcurrent - Relay Setting 3Document17 paginiOvercurrent - Relay Setting 3Shrikant KajaleÎncă nu există evaluări
- Restricted Earth Fault (REF) ProtectionDocument8 paginiRestricted Earth Fault (REF) ProtectionNaveen Amarasinghe100% (1)
- 132KV Transformer Protn APPLN07/Settings/Monnet Ispat 132KV Ndations Rev-0 Relay Setting RecommeDocument10 pagini132KV Transformer Protn APPLN07/Settings/Monnet Ispat 132KV Ndations Rev-0 Relay Setting Recommerajpower98100% (3)
- Power System StabilityDocument68 paginiPower System StabilitySarah Frazier100% (3)
- Fundamentals of Transformer ProtectionDocument37 paginiFundamentals of Transformer ProtectionVikas Oza100% (1)
- Testing and configuration of distance protection relay REL670Document9 paginiTesting and configuration of distance protection relay REL670R Roushdy Sawaby MohamedÎncă nu există evaluări
- 06 Distance ProtectionDocument20 pagini06 Distance ProtectionArliel John Garbo100% (1)
- Distance - Setting Calculation - ANSDocument7 paginiDistance - Setting Calculation - ANSJayabal Gnanaprakasam100% (1)
- Introduction to Distance Protection Principles and ApplicationsDocument71 paginiIntroduction to Distance Protection Principles and ApplicationsJonathan LewisÎncă nu există evaluări
- Finding The Direction in Directional Overcurrent RelaysDocument14 paginiFinding The Direction in Directional Overcurrent RelaysThirumal100% (1)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDe la EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsÎncă nu există evaluări
- Power System Small Signal Stability Analysis and ControlDe la EverandPower System Small Signal Stability Analysis and ControlEvaluare: 5 din 5 stele5/5 (2)
- 13b.power Swing Detection1-2007Document54 pagini13b.power Swing Detection1-2007madhavan100% (1)
- GRT100 Relay TestingDocument44 paginiGRT100 Relay TestingUttam MishraÎncă nu există evaluări
- Differential Protection ExplainedDocument10 paginiDifferential Protection ExplainedSaikat MahmudÎncă nu există evaluări
- Power Swing Detection v1.1Document29 paginiPower Swing Detection v1.1hathanhchinh2279Încă nu există evaluări
- A Symmetrical Two-Way Power Divider With Impedance Transforming PropertyDocument4 paginiA Symmetrical Two-Way Power Divider With Impedance Transforming PropertyJohn MichelÎncă nu există evaluări
- Resumen Handbook MotoresDocument23 paginiResumen Handbook MotoresingjsierraÎncă nu există evaluări
- Generation of Rotating Magnetic FieldDocument3 paginiGeneration of Rotating Magnetic FieldSUNIL MAURYAÎncă nu există evaluări
- AMT 221 P1 Definition & System ArchitectureDocument63 paginiAMT 221 P1 Definition & System ArchitectureJennifer GazoÎncă nu există evaluări
- ESPTrouble Shooting GuideDocument65 paginiESPTrouble Shooting Guidesivakscribd67% (3)
- Test in English For Maintenance Licenses: Departamento Seguridad OperacionalDocument71 paginiTest in English For Maintenance Licenses: Departamento Seguridad OperacionalAdrianÎncă nu există evaluări
- Unit ConversionDocument33 paginiUnit ConversionmukhleshÎncă nu există evaluări
- TPABDocument7 paginiTPABnurvaniÎncă nu există evaluări
- Technology Oscillating-Mountings enDocument7 paginiTechnology Oscillating-Mountings en666667Încă nu există evaluări
- Newton's Laws Tutorial SolutionsDocument7 paginiNewton's Laws Tutorial SolutionsWinni TanÎncă nu există evaluări
- CBSE Class 12 Physics Chapter 5 Magnetism and Matter NotesDocument8 paginiCBSE Class 12 Physics Chapter 5 Magnetism and Matter NotesAmrit KumarÎncă nu există evaluări
- Tuning Dielectric Resonators ElectronicallyDocument5 paginiTuning Dielectric Resonators Electronicallykhanafzaal2576Încă nu există evaluări
- Paramagnetic Article PDFDocument5 paginiParamagnetic Article PDFJonathan SinclairÎncă nu există evaluări
- Lesson3-Balanced and Unbalanced FinalDocument2 paginiLesson3-Balanced and Unbalanced Finalapi-239321343100% (1)
- Auger Recombination PDFDocument14 paginiAuger Recombination PDFviperÎncă nu există evaluări
- Longitudinal Wave: Solutions To Problem Set No. 7 Conceptual Exercises WavesDocument8 paginiLongitudinal Wave: Solutions To Problem Set No. 7 Conceptual Exercises WavesKarl Oliver Catabay RicardoÎncă nu există evaluări
- Fundamentals of Electrical Circuits-ITSE-1261: Lecture 01: Course Overview, Basic Electric Circuit ConceptsDocument45 paginiFundamentals of Electrical Circuits-ITSE-1261: Lecture 01: Course Overview, Basic Electric Circuit ConceptsKebede Alemu100% (1)
- Supply of Cast Resin Transformers 11/0.433 KV, 1000 kVA - 2 NosDocument13 paginiSupply of Cast Resin Transformers 11/0.433 KV, 1000 kVA - 2 NosDarwish MammiÎncă nu există evaluări
- Friction: The Surface Offers A Force That Opposes The Motion Called As Frictional ForceDocument6 paginiFriction: The Surface Offers A Force That Opposes The Motion Called As Frictional Forcechhabra navdeep100% (1)
- Molecular Hydrodynamics in Complex FluidsDocument183 paginiMolecular Hydrodynamics in Complex FluidsgovindhegdeÎncă nu există evaluări
- The Myth of K.O.P PDFDocument7 paginiThe Myth of K.O.P PDFRoger BurgessÎncă nu există evaluări
- Component Locations: 345D and 349D Excavator Accugrade Electrical SystemDocument2 paginiComponent Locations: 345D and 349D Excavator Accugrade Electrical SystemRodrigo EvaristoÎncă nu există evaluări
- Electric Motor Technical Data PDFDocument1 paginăElectric Motor Technical Data PDFTushar Sonar MainÎncă nu există evaluări
- Fillet Welds Loaded in The Connection Plane (Lap Joints)Document6 paginiFillet Welds Loaded in The Connection Plane (Lap Joints)MoonzeÎncă nu există evaluări
- Sizing Cables, Conduit and TrunkingDocument56 paginiSizing Cables, Conduit and TrunkingChanel Maglinao100% (9)
- Compact Digital Insulation/Continuity TestersDocument1 paginăCompact Digital Insulation/Continuity TestersFarid AdnanÎncă nu există evaluări
- Non-Contact Power Meter MIT ThesisDocument121 paginiNon-Contact Power Meter MIT ThesisTrần LinhÎncă nu există evaluări
- A Design of The DC Motor Control CircuitDocument9 paginiA Design of The DC Motor Control Circuitnyskyscraper051127Încă nu există evaluări
- Communicating Measurement Centre Type M230Document8 paginiCommunicating Measurement Centre Type M230javed shaikh chaandÎncă nu există evaluări
- Transmission QbankDocument20 paginiTransmission QbankjascnjÎncă nu există evaluări
- P2 Forces and Terminal Velocity HigherDocument12 paginiP2 Forces and Terminal Velocity HigherdownendscienceÎncă nu există evaluări