S-ar putea să vă placă și
- Booting Windows CE With USBDocument2 paginiBooting Windows CE With USBJorge Valdez0% (1)
- Lect 08 - Configuring Domain Name ServiceDocument52 paginiLect 08 - Configuring Domain Name Service815003Încă nu există evaluări
- The Cpu: Central Processing UnitDocument26 paginiThe Cpu: Central Processing Unitjim_finn_1Încă nu există evaluări
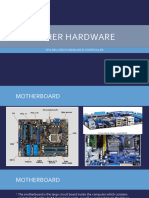
- What Is A Motherboard ?Document13 paginiWhat Is A Motherboard ?Ian OffemariaÎncă nu există evaluări
- Otherhardware Updated Js2019 Clo1 Week3Document54 paginiOtherhardware Updated Js2019 Clo1 Week3somerandomhedgehog100% (1)
- Power Supply, Cooling, and ProtectionDocument34 paginiPower Supply, Cooling, and ProtectionGaurav RaneÎncă nu există evaluări
- Plotly TutorialDocument95 paginiPlotly TutorialWeijie Chen100% (1)
- Processor SpecificationsDocument43 paginiProcessor Specificationsshubham pandeyÎncă nu există evaluări
- Lesson 03Document32 paginiLesson 03LuisCantoralÎncă nu există evaluări
- PC Troubleshooting: BY Roland Jason L. AquinoDocument191 paginiPC Troubleshooting: BY Roland Jason L. Aquino0bserver101Încă nu există evaluări
- CH 2 Fundamentals of ComputersDocument32 paginiCH 2 Fundamentals of ComputersFaisal MalekÎncă nu există evaluări
- 23 Computer Application Commerce Unit-02Document42 pagini23 Computer Application Commerce Unit-02Kishore KrishnanÎncă nu există evaluări
- Practical # 01: Introduction To Computers, Parts of Computers and Architecture of Computer Tools: 1.1 What Is Computer?Document13 paginiPractical # 01: Introduction To Computers, Parts of Computers and Architecture of Computer Tools: 1.1 What Is Computer?funny videosÎncă nu există evaluări
- Embedded SystemsDocument20 paginiEmbedded Systemswalidghoneim1970Încă nu există evaluări
- SMC System Engineering HandbookDocument262 paginiSMC System Engineering HandbookThomas BerryÎncă nu există evaluări
- Certinside CompTIA A Essentials 220601 Exam (1Document144 paginiCertinside CompTIA A Essentials 220601 Exam (1April TolerÎncă nu există evaluări
- Chapter 2Document29 paginiChapter 2Roma AmorÎncă nu există evaluări
- Chapman Electric Machinery Fundamentals 5th c2012 Solutions ISMDocument8 paginiChapman Electric Machinery Fundamentals 5th c2012 Solutions ISMRodrigo MartinsÎncă nu există evaluări
- Modelling and Simulation in EngineeringDocument21 paginiModelling and Simulation in EngineeringAbdul Aziz TurdiÎncă nu există evaluări
- Computer 1 With Applications: Introduction To ComputersDocument23 paginiComputer 1 With Applications: Introduction To ComputersDonna Hernandez100% (1)
- Digital Distance Relay Modeling and Testing Using LabVIEW and MATLAB SimulinkDocument55 paginiDigital Distance Relay Modeling and Testing Using LabVIEW and MATLAB SimulinkK Vijay Bhaskar ReddyÎncă nu există evaluări
- EE4455 Embedded Systems - OBTLDocument6 paginiEE4455 Embedded Systems - OBTLAaron Tan100% (1)
- Data Representation L4 ImagesDocument19 paginiData Representation L4 ImagesUsman Malik100% (1)
- Avr - ListDocument8 paginiAvr - ListleandrovaffonsoÎncă nu există evaluări
- Basics of Operating SystemsDocument31 paginiBasics of Operating Systemsyyhh yhyhyÎncă nu există evaluări
- Mobile Backhaul Trends and Impact On Carrier NetworksDocument34 paginiMobile Backhaul Trends and Impact On Carrier NetworksTaher Rabea GedamyÎncă nu există evaluări
- Human Resource Management of Apple - IncDocument9 paginiHuman Resource Management of Apple - Incnahidul202100% (2)
- Von Neumann vs Harvard architecturesDocument4 paginiVon Neumann vs Harvard architecturesAmeenÎncă nu există evaluări
- Paper 1 Theory Unit 4 Operating Systems and Computer ArchitectureDocument2 paginiPaper 1 Theory Unit 4 Operating Systems and Computer ArchitectureGamer XenoirÎncă nu există evaluări
- Brief overview of computer architecture and CPU operationDocument4 paginiBrief overview of computer architecture and CPU operationpraveenrangareÎncă nu există evaluări
- Arm Assembly TutorialDocument85 paginiArm Assembly TutorialZhennan Wang100% (1)
- Chapter 03 Assembly LanguageDocument96 paginiChapter 03 Assembly LanguageA Sai BhargavÎncă nu există evaluări
- Computer Science - Turing Model Vs Von Neuman Model - Stack OverflowDocument3 paginiComputer Science - Turing Model Vs Von Neuman Model - Stack OverflowdillipdÎncă nu există evaluări
- Ibm-Pc Assembly-Language Lecture Notes PAGE 1/361Document361 paginiIbm-Pc Assembly-Language Lecture Notes PAGE 1/361M_ComputerÎncă nu există evaluări
- C Lib ClibabiDocument35 paginiC Lib ClibabinevdullÎncă nu există evaluări
- ARM ArchitectureDocument16 paginiARM ArchitectureUsman IshtiaqÎncă nu există evaluări
- MBED With Nucleo F401REDocument15 paginiMBED With Nucleo F401REZahidur Ovi RahmanÎncă nu există evaluări
- CPSC 105 PC Security and Privacy: How Computers WorkDocument74 paginiCPSC 105 PC Security and Privacy: How Computers WorkAnonymous O7NI8R3gFAÎncă nu există evaluări
- Embedded Programs: 3.1.1 High-Level Code 3.1.2 Machine Language 3.1.3 Assembly Language CodeDocument56 paginiEmbedded Programs: 3.1.1 High-Level Code 3.1.2 Machine Language 3.1.3 Assembly Language CodeGetachew ShambelÎncă nu există evaluări
- Harvard Architecture PDFDocument3 paginiHarvard Architecture PDFsathkar220% (1)
- Microprocessor - Classification: RISC ProcessorDocument5 paginiMicroprocessor - Classification: RISC ProcessorPragya ChauhanÎncă nu există evaluări
- Writing Programs With Assembly LanguageDocument14 paginiWriting Programs With Assembly Languageعبدالرحيم اودين0% (1)
- Liquid Level Process Control Using PIDDocument13 paginiLiquid Level Process Control Using PIDMalery Elaine ChanÎncă nu există evaluări
- Coldfire Assembly LanguageDocument9 paginiColdfire Assembly LanguageNegru P. PlantatieÎncă nu există evaluări
- Field Effect Transistors (Fets) : - Two Types of FetDocument28 paginiField Effect Transistors (Fets) : - Two Types of FetCruise_IceÎncă nu există evaluări
- Basic Computer Components: Unit 2Document15 paginiBasic Computer Components: Unit 2JK EduNotesÎncă nu există evaluări
- Cortex - M1: Technical Reference ManualDocument174 paginiCortex - M1: Technical Reference ManualSzilárd MájerÎncă nu există evaluări
- Introduction to Control Systems EngineeringDocument28 paginiIntroduction to Control Systems EngineeringOmer Ahmed100% (1)
- CSE306. Computer NetworksDocument22 paginiCSE306. Computer NetworksAnkit KumarÎncă nu există evaluări
- Lab Manual For Assembly Language CourseDocument42 paginiLab Manual For Assembly Language CourseZaid Masood KhanÎncă nu există evaluări
- Embedded Systems: Bhushan. H. DDocument17 paginiEmbedded Systems: Bhushan. H. DBhushan H DeshpandeÎncă nu există evaluări
- Computer Hardware ComponentsDocument59 paginiComputer Hardware ComponentsJason EchevariaÎncă nu există evaluări
- Von Neumann Architecture 2019Document74 paginiVon Neumann Architecture 2019CS101Încă nu există evaluări
- 1.0 Motherboard DEFINITION: Is The Central Printed Circuit Board (PCB) in SomeDocument20 pagini1.0 Motherboard DEFINITION: Is The Central Printed Circuit Board (PCB) in Somekadilobari100% (3)
- 567 Pramujati Intro To Auto ControlDocument15 pagini567 Pramujati Intro To Auto ControlCruise_IceÎncă nu există evaluări
- Segment RegisterDocument3 paginiSegment Registerhdqa Mengal100% (1)
- The History of Networking PresentationDocument14 paginiThe History of Networking PresentationLink Worx SeoÎncă nu există evaluări
- MotherboardDocument2 paginiMotherboardAimee Hernandez100% (1)
- USB PresentationDocument21 paginiUSB PresentationsaikavyaÎncă nu există evaluări
- Von Neumann ArchitectureDocument2 paginiVon Neumann ArchitectureAakash Floydian JoshiÎncă nu există evaluări
- The Von Neumann Computer ArchitecureDocument14 paginiThe Von Neumann Computer ArchitecureNkembeh Benjamin SC20C092Încă nu există evaluări
- MPMC Architecture and ComponentsDocument109 paginiMPMC Architecture and Componentsshivank mishraÎncă nu există evaluări
- Microprocessor Lecture 1Document18 paginiMicroprocessor Lecture 1ojasbhosale07Încă nu există evaluări
- MICROPROCESSOR LECTURE #1Document39 paginiMICROPROCESSOR LECTURE #1Furkan KoşdaşÎncă nu există evaluări
- CISE414 - Unit 01 IntroductionDocument50 paginiCISE414 - Unit 01 Introductionمحمد حمدÎncă nu există evaluări
- Module 03 Integrative Coding: BackgroundDocument5 paginiModule 03 Integrative Coding: BackgroundRandy TabaogÎncă nu există evaluări
- Business Blueprint SampleDocument9 paginiBusiness Blueprint SampleMoumee ChandaÎncă nu există evaluări
- Instalation AlteraDocument3 paginiInstalation AlteraAhmedAlazzawiÎncă nu există evaluări
- Machine Learning and Data Science MasterDocument19 paginiMachine Learning and Data Science MasterHrisav BhowmickÎncă nu există evaluări
- Rubrik Slide For Cust - 09042020Document23 paginiRubrik Slide For Cust - 09042020rshandyÎncă nu există evaluări
- Yash ResumeDocument2 paginiYash Resumeyash aggarwalÎncă nu există evaluări
- FOP ConfiguringaGrandstreamGXW 410XDevicetoactasanFXOGateway 170722 0237 30740Document5 paginiFOP ConfiguringaGrandstreamGXW 410XDevicetoactasanFXOGateway 170722 0237 30740Eloi SaÎncă nu există evaluări
- Top 30 Agile Testing Interview QuestionsDocument19 paginiTop 30 Agile Testing Interview QuestionsabenezerÎncă nu există evaluări
- FIT9132 Tutorial 6 Sample SolutionDocument6 paginiFIT9132 Tutorial 6 Sample SolutionLe Duy ThoÎncă nu există evaluări
- Attivo Networks-Deception MythsDocument9 paginiAttivo Networks-Deception MythsOscar Gopro SEISÎncă nu există evaluări
- ArchiMate Part 2 - 2Document8 paginiArchiMate Part 2 - 2saiaymanbensadiÎncă nu există evaluări
- Critical Business Update Broadcom - Positioning & Portfolio Simplification FAQDocument8 paginiCritical Business Update Broadcom - Positioning & Portfolio Simplification FAQRon BerserkirÎncă nu există evaluări
- How To Get A Product by Its ID Programmatically - Development - Magento 2Document3 paginiHow To Get A Product by Its ID Programmatically - Development - Magento 2m1k13Încă nu există evaluări
- ISSD User-Guide PDFDocument4 paginiISSD User-Guide PDFRavindu JayalathÎncă nu există evaluări
- GUI GuideDocument606 paginiGUI GuideAnLeÎncă nu există evaluări
- CSE325 - A1 - G2 - Lecture2 NotesDocument39 paginiCSE325 - A1 - G2 - Lecture2 Notesislam2059Încă nu există evaluări
- Increasing The Product Data-Length in MS-Navision® From 50 To 250 Characters - SD - SC - 201912Document12 paginiIncreasing The Product Data-Length in MS-Navision® From 50 To 250 Characters - SD - SC - 201912Sicelo DlaminiÎncă nu există evaluări
- Looxcie 3 User ManualDocument4 paginiLooxcie 3 User ManualAndrewSchembriÎncă nu există evaluări
- Yonatan Andreas Parsaoran Lumban Tobing - ResumeDocument2 paginiYonatan Andreas Parsaoran Lumban Tobing - ResumeChrisma Lumban TobingÎncă nu există evaluări
- Qos SettingDocument27 paginiQos Settinglucky chandelÎncă nu există evaluări
- Marilyn Manson and David Lynch - Genealogies of Pain PDF KindleDocument1 paginăMarilyn Manson and David Lynch - Genealogies of Pain PDF KindleWroth BrothÎncă nu există evaluări
- San Diego Release Notes 3-15-2022Document92 paginiSan Diego Release Notes 3-15-2022Venkata SainadhÎncă nu există evaluări
- Topmost setting failure and Bluetooth permission error in app logsDocument1 paginăTopmost setting failure and Bluetooth permission error in app logsВладислав МаньківськийÎncă nu există evaluări
- CHAPTER 4 DiabetesDocument6 paginiCHAPTER 4 DiabetesSRPC ECEÎncă nu există evaluări
- SBI Clerk Prelims Reasoning Ability Mock PaperDocument15 paginiSBI Clerk Prelims Reasoning Ability Mock PaperbhuviÎncă nu există evaluări