S-ar putea să vă placă și
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveDe la EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveEvaluare: 5 din 5 stele5/5 (2)
- Airbus Flight Control Laws: The Reconfiguration LawsDe la EverandAirbus Flight Control Laws: The Reconfiguration LawsEvaluare: 4.5 din 5 stele4.5/5 (16)
- Avionics Ventilation SystemDocument6 paginiAvionics Ventilation SystemIbrahim AyyilÎncă nu există evaluări
- BLEED AIR LEAK Warnings and Trouble Shooting RecommendationsDocument15 paginiBLEED AIR LEAK Warnings and Trouble Shooting RecommendationsJivendra KumarÎncă nu există evaluări
- A320 Aircraft General McqsDocument3 paginiA320 Aircraft General McqsZain HasanÎncă nu există evaluări
- Wheel CHKDocument24 paginiWheel CHKvietha1990Încă nu există evaluări
- A 320321 Mel CDLDocument765 paginiA 320321 Mel CDLMustafa Direk100% (2)
- How To Use TSMDocument26 paginiHow To Use TSMAhmed ElFekyÎncă nu există evaluări
- Set of Recommendations For AIR BLEED LEAK WarningDocument5 paginiSet of Recommendations For AIR BLEED LEAK WarningMaleficaruMTÎncă nu există evaluări
- ATR-Ice and Rain ProtectionDocument38 paginiATR-Ice and Rain ProtectionJavierÎncă nu există evaluări
- ATR Flight ControlsDocument41 paginiATR Flight ControlsJavier100% (3)
- Qucik Dispatch Guide A320 AMM Reference OnlyDocument10 paginiQucik Dispatch Guide A320 AMM Reference OnlyAbdul Qadeer KhanÎncă nu există evaluări
- A320Document41 paginiA320Varun Kapoor75% (4)
- Aeronautical Air-Ground Data Link CommunicationsDe la EverandAeronautical Air-Ground Data Link CommunicationsÎncă nu există evaluări
- Flight Profile Variantions Due To Spreading Practice of CI PlanningDocument8 paginiFlight Profile Variantions Due To Spreading Practice of CI PlanningpepegoesdigitalÎncă nu există evaluări
- Single Aisle Technical Training Manual Maintenance Course - T1 (V2500-A5/Me) Aircraft General PracticesDocument74 paginiSingle Aisle Technical Training Manual Maintenance Course - T1 (V2500-A5/Me) Aircraft General PracticesAndré DieguesÎncă nu există evaluări
- A320 Electrical System PDFDocument3 paginiA320 Electrical System PDFVijai PrakashÎncă nu există evaluări
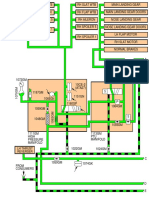
- Figure 29-00-00-13400-00-U / SHEET 1/5 - Hydraulic Power - Schematic ON A/C 101-199, 201-300, 902-999Document1 paginăFigure 29-00-00-13400-00-U / SHEET 1/5 - Hydraulic Power - Schematic ON A/C 101-199, 201-300, 902-999Pankaj SrivastavaÎncă nu există evaluări
- Examen A340Document88 paginiExamen A340Alex E. Morales100% (2)
- Brake Alternate Servovalve Fault - WISEDocument2 paginiBrake Alternate Servovalve Fault - WISERizwan100% (1)
- Airbus ResetsDocument228 paginiAirbus ResetsРоман ДяченкоÎncă nu există evaluări
- Ibook FlightDeck - V5 - Web PDFDocument46 paginiIbook FlightDeck - V5 - Web PDFtansu özdemir100% (1)
- Technical Data Support and Services: Aircraft Schematic Manual (ASM) Aircraft Wiring Manual (AWM)Document1 paginăTechnical Data Support and Services: Aircraft Schematic Manual (ASM) Aircraft Wiring Manual (AWM)JAYACHANDRANÎncă nu există evaluări
- CB RESET A320 and ProcedureDocument74 paginiCB RESET A320 and ProcedureHasry RitongaÎncă nu există evaluări
- 787 Hyd Spoiler LockoutDocument24 pagini787 Hyd Spoiler LockoutVIJAY CHAWLA100% (2)
- A320 DownlockDocument5 paginiA320 DownlockAshwani KumarÎncă nu există evaluări
- A320 Exam A PDFDocument102 paginiA320 Exam A PDFnaziaÎncă nu există evaluări
- Presentation Airbus A330 NeoDocument11 paginiPresentation Airbus A330 NeoDarmawan alhakim100% (1)
- Exam AERO4306 2005december PDFDocument4 paginiExam AERO4306 2005december PDFjonthemesÎncă nu există evaluări
- FOT Gravity FeedingDocument2 paginiFOT Gravity Feedingpedati0% (1)
- Arm A330Document581 paginiArm A330aan_pkppk100% (1)
- A320 CB List PDFDocument17 paginiA320 CB List PDFAnurag Mishra100% (1)
- A320 Dual Hydraulic LossDocument5 paginiA320 Dual Hydraulic LossLuca ZaffaroniÎncă nu există evaluări
- A 330 Ice and Rain ProtectionDocument21 paginiA 330 Ice and Rain ProtectionadliÎncă nu există evaluări
- Idle TestDocument5 paginiIdle TestKshitiz RastogiÎncă nu există evaluări
- Ata 38 Water - WasteDocument52 paginiAta 38 Water - WasteSohaib Aslam ChaudharyÎncă nu există evaluări
- Atr AfcsDocument30 paginiAtr AfcsJavier100% (1)
- A320 ENG BASIC A3 E (1 CMP) Einseitig PDFDocument9 paginiA320 ENG BASIC A3 E (1 CMP) Einseitig PDFranjitÎncă nu există evaluări
- Aircraft High Brake Temperature IssuesDocument16 paginiAircraft High Brake Temperature Issuesv1alfred100% (1)
- Rmoval of NLGDocument6 paginiRmoval of NLGje_carD23100% (1)
- ATR Air SystemsDocument59 paginiATR Air SystemsJavierÎncă nu există evaluări
- A320 FacDocument16 paginiA320 FachhgaffadfÎncă nu există evaluări
- Airbus NotesDocument128 paginiAirbus NotesavnishshastryÎncă nu există evaluări
- 4 A320 Flight DecDocument284 pagini4 A320 Flight Decelnmanea100% (2)
- M.E.L of Crew Oxigen at A320 NeoDocument2 paginiM.E.L of Crew Oxigen at A320 NeobnmmauricioÎncă nu există evaluări
- 22 Auto FlightDocument80 pagini22 Auto FlightTarik BenzinebÎncă nu există evaluări
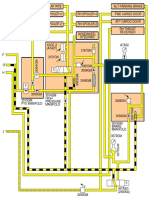
- Figure 29-00-00-13400-00-U / SHEET 5/5 - Hydraulic Power - Schematic ON A/C 101-199, 201-300, 902-999Document1 paginăFigure 29-00-00-13400-00-U / SHEET 5/5 - Hydraulic Power - Schematic ON A/C 101-199, 201-300, 902-999Pankaj SrivastavaÎncă nu există evaluări
- Circuit Breaker List - Sorted by Chapter Location Panel Row/Col ATADocument26 paginiCircuit Breaker List - Sorted by Chapter Location Panel Row/Col ATAAV Team3Încă nu există evaluări
- Figure 29-00-00-13400-00-U / SHEET 4/5 - Hydraulic Power - Schematic ON A/C 101-199, 201-300, 902-999Document1 paginăFigure 29-00-00-13400-00-U / SHEET 4/5 - Hydraulic Power - Schematic ON A/C 101-199, 201-300, 902-999Pankaj SrivastavaÎncă nu există evaluări
- A-330 Rev 19Document360 paginiA-330 Rev 19muathÎncă nu există evaluări
- Review B777 B1 Phase 9Document6 paginiReview B777 B1 Phase 9rizwan15Încă nu există evaluări
- Airbus A320 Family Non-Normal Notes PDFDocument112 paginiAirbus A320 Family Non-Normal Notes PDFCapt Devdatt SondeÎncă nu există evaluări
- A320-200 WEEKLY CHECK (Daily) : Airworthiness ManagementDocument7 paginiA320-200 WEEKLY CHECK (Daily) : Airworthiness ManagementOmair Aziz Rabbani100% (3)
- 27.23.00.008 03-JUL-2020 03-JUL-2020 Open A318, A319, A320, A321 27-23 Artus Sas Technical UpdateDocument12 pagini27.23.00.008 03-JUL-2020 03-JUL-2020 Open A318, A319, A320, A321 27-23 Artus Sas Technical UpdateJivendra KumarÎncă nu există evaluări
- Enhanced Avionics System A Complete Guide - 2020 EditionDe la EverandEnhanced Avionics System A Complete Guide - 2020 EditionÎncă nu există evaluări
- Integrated Modular Avionics: Less Is MoreDocument10 paginiIntegrated Modular Avionics: Less Is MoreShakil MahmudÎncă nu există evaluări
- 320CBTDocument360 pagini320CBTlovrennÎncă nu există evaluări
- AVIATECH A330 - A340 ATA 25 Equipment - Furnishing L3 PDFDocument95 paginiAVIATECH A330 - A340 ATA 25 Equipment - Furnishing L3 PDFAaron Danielle100% (1)
- Emc 3 TTM Level 1 AfDocument194 paginiEmc 3 TTM Level 1 AfPrajwal PatidarÎncă nu există evaluări
- JFSM Active Flow ControlDocument9 paginiJFSM Active Flow ControlFahmi IzzuddinÎncă nu există evaluări
- SI 2021-01 HPAF DTD 30 Sep 2021 Crew Rest GuidelinesDocument8 paginiSI 2021-01 HPAF DTD 30 Sep 2021 Crew Rest GuidelinesOffice of the Group Adjutant, 505th SRGÎncă nu există evaluări
- 35-10-25 Rev.8 PBEDocument83 pagini35-10-25 Rev.8 PBEnoureldinkamalÎncă nu există evaluări
- BNBC 1993 - Wind Load Calculation v002Document13 paginiBNBC 1993 - Wind Load Calculation v002Engr. Md. Mahmdudul Hasan ShawonÎncă nu există evaluări
- AW169 Energy Services Brochure - Gen2020Document5 paginiAW169 Energy Services Brochure - Gen2020Lavern P. SipinÎncă nu există evaluări
- (English (Auto-Generated) ) A320 CBT AIRBUS 320 - 319 COURSE - AIRCRAFT GENERAL (DownSub - Com)Document60 pagini(English (Auto-Generated) ) A320 CBT AIRBUS 320 - 319 COURSE - AIRCRAFT GENERAL (DownSub - Com)Duy Khanh NguyễnÎncă nu există evaluări
- Iar-80 Semff Combat Plane FullDocument1 paginăIar-80 Semff Combat Plane FullpccdtkÎncă nu există evaluări
- MetodologiaEHAvsEMADocument17 paginiMetodologiaEHAvsEMAFabián AcevedoÎncă nu există evaluări
- List of Active Indian Military Aircraft - WikipediaDocument31 paginiList of Active Indian Military Aircraft - WikipediaSubhankar GhoshÎncă nu există evaluări
- Week 1 Tutorial PDFDocument24 paginiWeek 1 Tutorial PDFMatthew WongÎncă nu există evaluări
- Rv-8 Manual en v1 1Document34 paginiRv-8 Manual en v1 1João Victor RochaÎncă nu există evaluări
- Full Egll EgphDocument35 paginiFull Egll EgphมารุจังÎncă nu există evaluări
- List of Active Indian Military Aircraft - Wikipedia, The Free EncyclopediaDocument10 paginiList of Active Indian Military Aircraft - Wikipedia, The Free EncyclopediaGirendra SinghÎncă nu există evaluări
- Airbus A320neo Family Project - Docx-1Document54 paginiAirbus A320neo Family Project - Docx-1ashik hussainÎncă nu există evaluări
- Piping Works Daily ReportDocument21 paginiPiping Works Daily ReportGomathyselviÎncă nu există evaluări
- 777rsec3 PDFDocument36 pagini777rsec3 PDFAlexander Ponce VelardeÎncă nu există evaluări
- APOLLO AG - 01 HALLEY AUTOGYRO Maintenance ManualDocument20 paginiAPOLLO AG - 01 HALLEY AUTOGYRO Maintenance Manualsavant2650% (2)
- Risk Sharing Partnership - Supply Chain Reilience - 2015Document7 paginiRisk Sharing Partnership - Supply Chain Reilience - 2015valdivijÎncă nu există evaluări
- r6 DA40 AMM Complete PDFDocument2.703 paginir6 DA40 AMM Complete PDFOscar Alejandro Rosas CasillasÎncă nu există evaluări
- Ata 36Document11 paginiAta 36jontis jasoliyaÎncă nu există evaluări
- Cessna CaravanDocument25 paginiCessna CaravanAlexandraAndreea100% (2)
- A318/A319/A320/A321: Service BulletinDocument55 paginiA318/A319/A320/A321: Service BulletinPradeep K sÎncă nu există evaluări
- CFI Preparation Guide PDFDocument264 paginiCFI Preparation Guide PDFJosephyr100% (4)
- Daily-Check-Check - List-B737-700Document7 paginiDaily-Check-Check - List-B737-700SITAÎncă nu există evaluări
- Cii Coursework PilotDocument4 paginiCii Coursework Pilotf5b2q8e3100% (2)
- ZuckDocument23 paginiZuckBubaÎncă nu există evaluări
- King Air 300: Operating HandbookDocument92 paginiKing Air 300: Operating HandbookMoises Sanchez100% (2)
- GCLA (La Palma)Document17 paginiGCLA (La Palma)adrianÎncă nu există evaluări
- CPCP, Sid S Cessna Model 188 SeriesDocument155 paginiCPCP, Sid S Cessna Model 188 Seriesvilladazafabian713100% (1)
- Ehamseqm PDF 1660468190Document58 paginiEhamseqm PDF 1660468190Maurits VeenÎncă nu există evaluări