S-ar putea să vă placă și
- CUDADocument3 paginiCUDAkillua gojoÎncă nu există evaluări
- 3D Graphics ProgramDocument13 pagini3D Graphics ProgramshellaÎncă nu există evaluări
- Tugas-GKV-A-1-24060119130071-Jeremy Edbert WidjajaDocument30 paginiTugas-GKV-A-1-24060119130071-Jeremy Edbert WidjajaJeremyÎncă nu există evaluări
- Final ARA5.0 BMWDocument22 paginiFinal ARA5.0 BMWCipto YafigÎncă nu există evaluări
- Java Geometry - Java: Import Import Import Public Class Static Double Double New Double For Int ReturnDocument10 paginiJava Geometry - Java: Import Import Import Public Class Static Double Double New Double For Int ReturnIsrael MarinoÎncă nu există evaluări
- TutoDocument3 paginiTutoAdrián MendozaÎncă nu există evaluări
- Include #Include #Include Int Float Void Float Float IntDocument13 paginiInclude #Include #Include Int Float Void Float Float IntShubham JhaÎncă nu există evaluări
- Scilab code for Type 1 Eigen FIR filter designDocument7 paginiScilab code for Type 1 Eigen FIR filter designlakshmipriya94Încă nu există evaluări
- Chuong Trinh Do Hoa 3D Voi OpenGLDocument77 paginiChuong Trinh Do Hoa 3D Voi OpenGLGiangÎncă nu există evaluări
- Laporan: Nama: Adhitia Nur Riski NRP: 2103187017 Kelas: D3 PJJ 2018Document48 paginiLaporan: Nama: Adhitia Nur Riski NRP: 2103187017 Kelas: D3 PJJ 2018Adhitia NurriskiÎncă nu există evaluări
- Task IntermediateDocument15 paginiTask Intermediateelnahassahmed34Încă nu există evaluări
- SkipDocument10 paginiSkipAnonymous EEIVbAOUÎncă nu există evaluări
- FFT OpenmpDocument11 paginiFFT OpenmpTruong van TruongÎncă nu există evaluări
- Program #1 Implementation of Line Generation Using DDA AlgorithmsDocument27 paginiProgram #1 Implementation of Line Generation Using DDA AlgorithmsRahul SrivastavaÎncă nu există evaluări
- Prak Grafika Komputer Minggu 10Document9 paginiPrak Grafika Komputer Minggu 10Shabrinaa InaasÎncă nu există evaluări
- UNIVERSIDAD NACIONAL JORGE BASADRE - Ecuaciones Polinomiales-Sistema de Ecuaciones no linealesDocument15 paginiUNIVERSIDAD NACIONAL JORGE BASADRE - Ecuaciones Polinomiales-Sistema de Ecuaciones no linealesIreneIMarcaÎncă nu există evaluări
- Sharpen Complex 2Document2 paginiSharpen Complex 2TanÎncă nu există evaluări
- Use of Rotation Matrices To Plot A Circle of Equal Altitude - enDocument12 paginiUse of Rotation Matrices To Plot A Circle of Equal Altitude - enEduardo HuenufilÎncă nu există evaluări
- Chapter 2 Week 3 BEEC4814 20202021Document49 paginiChapter 2 Week 3 BEEC4814 20202021Pugaaneswari VelauthamÎncă nu există evaluări
- CG LAB Worksheet - Translations, Scaling & RotationsDocument9 paginiCG LAB Worksheet - Translations, Scaling & RotationsPushp RajÎncă nu există evaluări
- Curves contrast adjustment shaderDocument4 paginiCurves contrast adjustment shaderMohamed OuattaraÎncă nu există evaluări
- Computer Graphics Practical File For CollegeDocument28 paginiComputer Graphics Practical File For CollegeSaif AliÎncă nu există evaluări
- Exercise 1 (1pt) : Master M1 SMA Computer Programming Class 2012/13. Exam. 2 Hours, Open BookDocument11 paginiExercise 1 (1pt) : Master M1 SMA Computer Programming Class 2012/13. Exam. 2 Hours, Open BookpranayÎncă nu există evaluări
- Prak Grafika Komputer Minggu 11Document17 paginiPrak Grafika Komputer Minggu 11Shabrinaa InaasÎncă nu există evaluări
- W3 P1 GaussianDocument7 paginiW3 P1 Gaussianvitucho92Încă nu există evaluări
- 3D Polygon TransformationDocument13 pagini3D Polygon TransformationRohit SabaleÎncă nu există evaluări
- Program To Draw A Line Using Dda AlgorithmDocument50 paginiProgram To Draw A Line Using Dda AlgorithmvarunsmithÎncă nu există evaluări
- Computer Graphics LabDocument43 paginiComputer Graphics LabMD Mehraj HossainÎncă nu există evaluări
- GPU Programming EE 4702-1 Final Examination: Name SolutionDocument10 paginiGPU Programming EE 4702-1 Final Examination: Name SolutionmoienÎncă nu există evaluări
- Adaptive SharpenDocument4 paginiAdaptive SharpenTanÎncă nu există evaluări
- The Cases Package: Asnd@triumf - CaDocument4 paginiThe Cases Package: Asnd@triumf - CaDũng Nguyễn NhoÎncă nu există evaluări
- ProgramsDocument27 paginiProgramsUday TheteÎncă nu există evaluări
- DDA and Midpoint Circle Drawing AlgorithmsDocument28 paginiDDA and Midpoint Circle Drawing AlgorithmsMD Mehraj HossainÎncă nu există evaluări
- Computer GraphicsDocument325 paginiComputer GraphicssenathipathikÎncă nu există evaluări
- P Nao e Menor Que 2Document4 paginiP Nao e Menor Que 2Cíntia PimentelÎncă nu există evaluări
- Chapter 5 Multiple Integrals Applications of IntegrationDocument29 paginiChapter 5 Multiple Integrals Applications of IntegrationZafrullahAhmadShaddiqÎncă nu există evaluări
- Ie1005-W3t2 ZXDocument13 paginiIe1005-W3t2 ZXWilliam WÎncă nu există evaluări
- Lab Manual CGDocument24 paginiLab Manual CGDrishti GuptaÎncă nu există evaluări
- W5 Ps Fourier Acoustic 2dDocument7 paginiW5 Ps Fourier Acoustic 2dvitucho92Încă nu există evaluări
- Sum in Pairs Zscaler Interview QuestionDocument3 paginiSum in Pairs Zscaler Interview QuestionShivam jhaÎncă nu există evaluări
- Computer Networks Lab - Part-B-C Program-2019Document15 paginiComputer Networks Lab - Part-B-C Program-2019unknown MeÎncă nu există evaluări
- Matlab CompiledDocument34 paginiMatlab CompiledAyanÎncă nu există evaluări
- Cglab Abput LapDocument22 paginiCglab Abput LapChandramathi MÎncă nu există evaluări
- Week 3 - Prog2 - Two Dimensional ArrayDocument12 paginiWeek 3 - Prog2 - Two Dimensional ArrayVince Kyle PagsuguironÎncă nu există evaluări
- YaDocument44 paginiYaapi-361356322Încă nu există evaluări
- Mathematics SciLabDocument36 paginiMathematics SciLabMihir DesaiÎncă nu există evaluări
- #Include #Include #Include #Include #Include #IncludeDocument9 pagini#Include #Include #Include #Include #Include #IncludessfofoÎncă nu există evaluări
- #Include #Include #Include #Include #Include #IncludeDocument9 pagini#Include #Include #Include #Include #Include #IncludessfofoÎncă nu există evaluări
- IncludeDocument6 paginiIncludeHhhh Hhhh Hhh HhhhÎncă nu există evaluări
- CG ASsignmentDocument20 paginiCG ASsignmentGoyal AdityaÎncă nu există evaluări
- 20 Quiz 14Document12 pagini20 Quiz 14demro channelÎncă nu există evaluări
- Team Reference Document: Sharif University of Technology - MkayDocument25 paginiTeam Reference Document: Sharif University of Technology - MkayMohammad Hossein SekhavatÎncă nu există evaluări
- Practical 08:-Write A Program in C To Rotate 2D and 3D Object With Origin and Pivot PointDocument4 paginiPractical 08:-Write A Program in C To Rotate 2D and 3D Object With Origin and Pivot PointKhan.aliÎncă nu există evaluări
- python 最小二乘法拟合圆Document3 paginipython 最小二乘法拟合圆Zheng JunÎncă nu există evaluări
- Minimum Spanning Tree CostDocument9 paginiMinimum Spanning Tree CostShashank SharmaÎncă nu există evaluări
- Neural Network Approximates Sinusoid FunctionDocument3 paginiNeural Network Approximates Sinusoid FunctionIndra SinagaÎncă nu există evaluări
- To PrintDocument54 paginiTo PrintAbhishek DograÎncă nu există evaluări
- CGIP Lab-FileDocument31 paginiCGIP Lab-FileRahul KumarÎncă nu există evaluări
- WWW Mathworks inDocument7 paginiWWW Mathworks inRagini SharmaÎncă nu există evaluări
- A2 Biopharm MetalDocument28 paginiA2 Biopharm MetalThanh Nghị BùiÎncă nu există evaluări
- Laura Hasley Statistics-Chi-Squared Goodness of Fit Test Lesson PlanDocument11 paginiLaura Hasley Statistics-Chi-Squared Goodness of Fit Test Lesson Planapi-242213383Încă nu există evaluări
- Angle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesDocument14 paginiAngle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesCHRISTIAN ZAVALAÎncă nu există evaluări
- Projectile LoomDocument23 paginiProjectile Loommehedi111560% (5)
- Pavan Kumar 1Document8 paginiPavan Kumar 1Anji ChÎncă nu există evaluări
- Body Fat PercentageDocument7 paginiBody Fat Percentagegurveer singhÎncă nu există evaluări
- Unit Vi: Classification and PredictionDocument29 paginiUnit Vi: Classification and PredictionpalaniappanÎncă nu există evaluări
- 1956 - Colinese - Boiler Efficiencies in SugarDocument7 pagini1956 - Colinese - Boiler Efficiencies in SugarPaul DurkinÎncă nu există evaluări
- Roll Handling Data Form: Company DetailsDocument1 paginăRoll Handling Data Form: Company DetailsAlfredo MinchezÎncă nu există evaluări
- OpenGL Basic FunctionsDocument21 paginiOpenGL Basic FunctionsAishwaryaNawkarÎncă nu există evaluări
- Erection Manual Hydro-1Document63 paginiErection Manual Hydro-1rajfab100% (1)
- METAL CLUSTER COMPLEXESDocument13 paginiMETAL CLUSTER COMPLEXESKeybateÎncă nu există evaluări
- Dcee 27a Lect 1Document39 paginiDcee 27a Lect 1Geraldine TimpocÎncă nu există evaluări
- Survey Whole Circle BearingDocument19 paginiSurvey Whole Circle BearingVin GaragiÎncă nu există evaluări
- Operations Management 1St Edition Cachon Test Bank Full Chapter PDFDocument36 paginiOperations Management 1St Edition Cachon Test Bank Full Chapter PDFwayne.martin885100% (11)
- LC 72322Document13 paginiLC 72322thecanislupusÎncă nu există evaluări
- Brushless DC Motor Control Using PLCDocument6 paginiBrushless DC Motor Control Using PLCvuluyen6688Încă nu există evaluări
- Navisworks BasicTrainingDocument54 paginiNavisworks BasicTrainingMadhankumarÎncă nu există evaluări
- RC Beam Deflection and Stress AnalysisDocument4 paginiRC Beam Deflection and Stress AnalysisMaxÎncă nu există evaluări
- Quiz6 AnswerDocument8 paginiQuiz6 AnswerTrí Tạ MinhÎncă nu există evaluări
- Record results of toy soldier experiment times with different massesDocument42 paginiRecord results of toy soldier experiment times with different massesTeoh Han Jie100% (1)
- 3dsmax2013 PU06 Readme0Document6 pagini3dsmax2013 PU06 Readme0Divad Zoñum CostaÎncă nu există evaluări
- Service Manual New Sigma-Control 2Document132 paginiService Manual New Sigma-Control 2gil_bar_t0% (3)
- Gas Welding and Cutting KitDocument6 paginiGas Welding and Cutting Kitkamlesh0106Încă nu există evaluări
- Financial management project report for cement factoryDocument106 paginiFinancial management project report for cement factoryAksh KhandelwalÎncă nu există evaluări
- CS2204 Analog & Digital Communication Question BankDocument16 paginiCS2204 Analog & Digital Communication Question BankJesse VincentÎncă nu există evaluări
- P&ID ManualDocument35 paginiP&ID Manualdharan kumarÎncă nu există evaluări
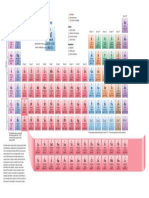
- Periodic TableDocument1 paginăPeriodic TableChemist MookaÎncă nu există evaluări
- Green Building Store MVHR Brochure-File032484Document9 paginiGreen Building Store MVHR Brochure-File032484Anthi ValavaniÎncă nu există evaluări