S-ar putea să vă placă și
- MONTENEGRO Baños Mágicos de Hierbas de Palo MonteDocument115 paginiMONTENEGRO Baños Mágicos de Hierbas de Palo MonteLenin Sucre93% (14)
- MONTENEGRO Baños Mágicos de Hierbas de Palo MonteDocument115 paginiMONTENEGRO Baños Mágicos de Hierbas de Palo MonteLenin Sucre93% (14)
- Atana Encantamiento de Las VelasDocument102 paginiAtana Encantamiento de Las VelasIFAILE ODARA95% (21)
- Cantos PaloDocument32 paginiCantos PaloIjo_Barapetu87% (61)
- Cantos PaloDocument32 paginiCantos PaloIjo_Barapetu87% (61)
- Cantos PaloDocument32 paginiCantos PaloIjo_Barapetu87% (61)
- Sellos AfricanosDocument3 paginiSellos Africanossantamuerte569Încă nu există evaluări
- Sellos AfricanosDocument3 paginiSellos Africanossantamuerte569Încă nu există evaluări
- Hechizos y FirmasDocument48 paginiHechizos y FirmasHenrifoyol Bows95% (21)
- Tratado Del ChamalongoDocument21 paginiTratado Del ChamalongoObbaOwo88% (34)
- Firmas Palo NuevasDocument23 paginiFirmas Palo Nuevassantamuerte56995% (20)
- Cuentos de La CarneDocument79 paginiCuentos de La CarneCesar G Galvan JimenezÎncă nu există evaluări
- El MonteDocument590 paginiEl MonteThomas El Gaba Ifákóredé S.88% (8)
- Tratado de Palo Monte (Pino Nuevo Nzila Kalunga)Document70 paginiTratado de Palo Monte (Pino Nuevo Nzila Kalunga)Yexander LugoÎncă nu există evaluări
- Tratado de Palo Monte (Pino Nuevo Nzila Kalunga)Document70 paginiTratado de Palo Monte (Pino Nuevo Nzila Kalunga)Yexander LugoÎncă nu există evaluări
- Tipos de DatosDocument79 paginiTipos de Datosephifannia100% (2)
- 2.1.-Programacion de PIC en Lenguaje CDocument28 pagini2.1.-Programacion de PIC en Lenguaje CFranco OrtizÎncă nu există evaluări
- Técnicas de Conmutación y Multiplexación.Document9 paginiTécnicas de Conmutación y Multiplexación.FRANCISCO JAVIER REYES CARRANZAÎncă nu există evaluări
- RezoDocument14 paginiRezofenixmodelsÎncă nu există evaluări
- RezoDocument14 paginiRezofenixmodelsÎncă nu există evaluări
- UNIDAD 2-Subtemas 2.6, 2.7, 2.9 y 2.10 Lenguajes de InterfazDocument9 paginiUNIDAD 2-Subtemas 2.6, 2.7, 2.9 y 2.10 Lenguajes de Interfazluis angel roman valdovinosÎncă nu există evaluări
- DT - UM - Q Manual Dexxum TDocument46 paginiDT - UM - Q Manual Dexxum TOscar Ocaña100% (5)
- Rezo Contra Sus EnemigosDocument3 paginiRezo Contra Sus EnemigosfenixmodelsÎncă nu există evaluări
- 2.9 Instrucciones Aritmeticas1Document4 pagini2.9 Instrucciones Aritmeticas1fortino_sanchezÎncă nu există evaluări
- Cuadro - Comparativo-Manuel Elias Berzunza PerezDocument3 paginiCuadro - Comparativo-Manuel Elias Berzunza Perezmanuel eliasÎncă nu există evaluări
- Investigar Componentes y Niveles de Virtualización Ejemplificando Un Proceso Plasmar Los Resultados en Un Reporte de Investigación.Document6 paginiInvestigar Componentes y Niveles de Virtualización Ejemplificando Un Proceso Plasmar Los Resultados en Un Reporte de Investigación.Richar GomezÎncă nu există evaluări
- Diferencia Entre Multiplexación y ConmutaciónDocument5 paginiDiferencia Entre Multiplexación y ConmutaciónhectorgoitiaÎncă nu există evaluări
- Análisis de Los Manejadores de Bases de DatosDocument4 paginiAnálisis de Los Manejadores de Bases de DatosAna Karen SotoÎncă nu există evaluări
- Semiotica para Principiantes (CV) e PDFDocument175 paginiSemiotica para Principiantes (CV) e PDFAHLTS298Încă nu există evaluări
- Enrutamiento y Redes WanDocument77 paginiEnrutamiento y Redes WanAlexander Rodriguez GonzalezÎncă nu există evaluări
- Unidad II Procesamiento DistribuidoDocument13 paginiUnidad II Procesamiento DistribuidoEdwin Alberto Ángel Rodríguez BernabéÎncă nu există evaluări
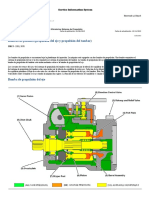
- CS-533E, CP-533E Vibratory Compactor BZE00001-UP Bombas de Pistones (Propulsión Del Eje y Propulsión Del Tambor)Document23 paginiCS-533E, CP-533E Vibratory Compactor BZE00001-UP Bombas de Pistones (Propulsión Del Eje y Propulsión Del Tambor)CEVegaOÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Unidad 3. Automatas Finitos IDocument13 paginiUnidad 3. Automatas Finitos IMilo Dominguez AckermanÎncă nu există evaluări
- 1.3 Configuración de Servidores WANDocument11 pagini1.3 Configuración de Servidores WANKatia Rubit Benitez Castro50% (2)
- Convergencia y RedundanciaDocument8 paginiConvergencia y RedundanciaDominikÎncă nu există evaluări
- 2.3 Tecnologías de ConmutaciónDocument14 pagini2.3 Tecnologías de ConmutaciónRick Ramon AÎncă nu există evaluări
- 1.5 Clasificación de Redes (Por Su Forma de Transmisión, Por Su Forma de Conmutación, Por Su Alcance)Document6 pagini1.5 Clasificación de Redes (Por Su Forma de Transmisión, Por Su Forma de Conmutación, Por Su Alcance)الله ووكر وباللهÎncă nu există evaluări
- Protocolos de Enrutamiento Internos y Externos. Protocolos de Enrutamiento Por Vector-DistanciaDocument3 paginiProtocolos de Enrutamiento Internos y Externos. Protocolos de Enrutamiento Por Vector-DistanciaAstriid RiiverÎncă nu există evaluări
- Tecnologías: 4. InalámbricasDocument6 paginiTecnologías: 4. Inalámbricaschocky22Încă nu există evaluări
- Practica 5: Spanning Tree Protocol : Parte 1: EjerciciosDocument5 paginiPractica 5: Spanning Tree Protocol : Parte 1: EjerciciosCristianÎncă nu există evaluări
- Captura de Cadenas Con FormatoDocument11 paginiCaptura de Cadenas Con FormatoEfra LarÎncă nu există evaluări
- 2.1. - Organización Del Procesador-SINTESISDocument2 pagini2.1. - Organización Del Procesador-SINTESISJose Luis Bautista Gomez100% (1)
- T19-Redundancia en Capa 2Document26 paginiT19-Redundancia en Capa 2daniel junior vilchez shupingahuaÎncă nu există evaluări
- Unidad 2 Lenguajes y AutomatasDocument14 paginiUnidad 2 Lenguajes y AutomatasIrving Cobain100% (1)
- 4.3 Sistemas de Memoria Compartida: MultiprocesadoresDocument13 pagini4.3 Sistemas de Memoria Compartida: MultiprocesadoresLiviJhacer RuizÎncă nu există evaluări
- Unidad 3. Modularización PDFDocument4 paginiUnidad 3. Modularización PDFVictor Alfonso MontalvoÎncă nu există evaluări
- 4.1 Modelos de ProgramaciónDocument32 pagini4.1 Modelos de ProgramaciónBetty_jade0% (1)
- Preguntas de HSRP GLBPDocument2 paginiPreguntas de HSRP GLBPManuel Iñiguez DuraznoÎncă nu există evaluări
- Packet Tracer: Propagación de Una Ruta Predeterminada en El Protocolo Eigrp para Ipv4 Y Ipv6Document4 paginiPacket Tracer: Propagación de Una Ruta Predeterminada en El Protocolo Eigrp para Ipv4 Y Ipv6milan7Încă nu există evaluări
- Unidad 2. Fundamentos de Telecomunicaciones.Document12 paginiUnidad 2. Fundamentos de Telecomunicaciones.Javier MewloCxÎncă nu există evaluări
- Optimización Global y Mirilla EjerciciosDocument3 paginiOptimización Global y Mirilla EjerciciosJorge Alberto Guzman Gutierrez100% (1)
- Tabla de Interrupciones Procesador 8086Document5 paginiTabla de Interrupciones Procesador 8086darckbyteÎncă nu există evaluări
- Comunicación Entre Procesos (Sockets, RPC) .Document1 paginăComunicación Entre Procesos (Sockets, RPC) .JESUS ABRAHAM VILLANUEVA LOERAÎncă nu există evaluări
- Conceptos Basicos Del Manejo de La MemoriaDocument14 paginiConceptos Basicos Del Manejo de La MemoriamomosfeikÎncă nu există evaluări
- Ejemplo de VLSMDocument10 paginiEjemplo de VLSMFrankin Esteban Carmona Aguilar100% (1)
- Enlaces TroncalesDocument9 paginiEnlaces TroncalesDominikÎncă nu există evaluări
- Cuestionario Unidad 4 Lenguajes de InterfazDocument3 paginiCuestionario Unidad 4 Lenguajes de InterfazKNDevsÎncă nu există evaluări
- Invetigación CIDR y VLSMDocument21 paginiInvetigación CIDR y VLSMMiguel Angel RiosÎncă nu există evaluări
- Cuestionario Capa de Enlace de Datos y Capa FísicaDocument5 paginiCuestionario Capa de Enlace de Datos y Capa FísicaAle MorenoÎncă nu există evaluări
- Examen Final Ccna2 v4.0Document23 paginiExamen Final Ccna2 v4.0ulisesitzÎncă nu există evaluări
- Modem, Estándares y Protocolos: Fundamentos de TelecomunicacionesDocument6 paginiModem, Estándares y Protocolos: Fundamentos de Telecomunicacionesluis sanchez100% (1)
- Videoclub Base de DatosDocument44 paginiVideoclub Base de DatosSaúl Gómez0% (3)
- Funciones Avanzadas INT 10HDocument3 paginiFunciones Avanzadas INT 10HGerson Arriaza100% (1)
- 3.0.1.2 Class Activity - Designing A Communications System - ILMDocument2 pagini3.0.1.2 Class Activity - Designing A Communications System - ILMsugapageÎncă nu există evaluări
- 2.3.5 Funciones Automatas IIDocument16 pagini2.3.5 Funciones Automatas IIDaisy DiazÎncă nu există evaluări
- Traductor (Automatas 1)Document8 paginiTraductor (Automatas 1)Hecsali SalinasÎncă nu există evaluări
- Unidad 1 STP RSTPDocument35 paginiUnidad 1 STP RSTPAdriana Pérez LópezÎncă nu există evaluări
- Actividad 4Document8 paginiActividad 4Guillermo Ramos0% (1)
- Señal Reloj Flanco y Nivel Grupo 4.pooDocument10 paginiSeñal Reloj Flanco y Nivel Grupo 4.pooALANYS DAYANA GUERRERO PERRAZOÎncă nu există evaluări
- Frame Relay Punto A MultipuntoDocument5 paginiFrame Relay Punto A MultipuntoJavier Pablo ToctoÎncă nu există evaluări
- Guia 1. Introducción A JFLAP y Creación de AutómatasDocument17 paginiGuia 1. Introducción A JFLAP y Creación de AutómatasAkademus GalileoÎncă nu există evaluări
- Unidad VI - Dispositivos de Comunicación - 6.3 Protocolos y EstándaresDocument31 paginiUnidad VI - Dispositivos de Comunicación - 6.3 Protocolos y EstándaresWilliam VergaraÎncă nu există evaluări
- Calculo de La Raiz Cuadrada en AssemblerDocument7 paginiCalculo de La Raiz Cuadrada en AssemblerSebastian Villalobos100% (1)
- Modos de DireccionamientoDocument49 paginiModos de DireccionamientoAlejandro CaballeroÎncă nu există evaluări
- Seguridad y Proteccion en Los Sistemas Operativos PDFDocument14 paginiSeguridad y Proteccion en Los Sistemas Operativos PDFjessikaparica100% (4)
- 1.2.4.1 BusesDocument43 pagini1.2.4.1 BusesFany Velazquez MartinezÎncă nu există evaluări
- Unidad 4 Programacion HibridaDocument9 paginiUnidad 4 Programacion HibridaYossi G. NuñezÎncă nu există evaluări
- El Lenguaje Ensamblador Del Pic16f84a - CompressDocument61 paginiEl Lenguaje Ensamblador Del Pic16f84a - CompressYovana Condori MolleapazaÎncă nu există evaluări
- Programacion Del Dspic - Sesion2Document12 paginiProgramacion Del Dspic - Sesion2abrahan lajo farias100% (1)
- Repertorio de InstruccionesDocument61 paginiRepertorio de InstruccionesROBERTO KARLO CAMPOS TIRADOÎncă nu există evaluări
- El Lenguaje Ensamblador Del PIC16F84ADocument57 paginiEl Lenguaje Ensamblador Del PIC16F84ALask HirakawaÎncă nu există evaluări
- Un Cuento de PrincesasDocument1 paginăUn Cuento de PrincesasfenixmodelsÎncă nu există evaluări
- Capacidades FisicasDocument24 paginiCapacidades FisicasfenixmodelsÎncă nu există evaluări
- Historia Seguridad IndustrialDocument22 paginiHistoria Seguridad Industrialandina21Încă nu există evaluări
- Arriba InkiseDocument3 paginiArriba InkisefenixmodelsÎncă nu există evaluări
- EL CHAMALONGO Tratado Con 7 Piezas PDFDocument25 paginiEL CHAMALONGO Tratado Con 7 Piezas PDFfenixmodels100% (1)
- Regla Muertera Otunga MayombeDocument6 paginiRegla Muertera Otunga MayombefenixmodelsÎncă nu există evaluări
- Definicion de Ciencias PoliticasDocument7 paginiDefinicion de Ciencias Politicasfenixmodels100% (4)
- Cronograma de ActividadesDocument2 paginiCronograma de ActividadesfenixmodelsÎncă nu există evaluări
- Como Salir de La PobrezaDocument7 paginiComo Salir de La Pobrezaalexcoloradito7Încă nu există evaluări
- Designa Abogado Adicional y Acta de Constatacion y Lacrado de Mi VehiculoDocument3 paginiDesigna Abogado Adicional y Acta de Constatacion y Lacrado de Mi VehiculoRolando PozoÎncă nu există evaluări
- Alcance de IngenieriaDocument101 paginiAlcance de IngenieriaJouls GarciaÎncă nu există evaluări
- GuiaDocente 2439 ADocument2 paginiGuiaDocente 2439 AAlejandra López SalasÎncă nu există evaluări
- Eduardo KingmanDocument4 paginiEduardo KingmanDAVIS CALLEÎncă nu există evaluări
- Curriculum Vitae Rodolfo Garcia Silva Ingeniero Civil Industrial Mayo 2012 PDFDocument4 paginiCurriculum Vitae Rodolfo Garcia Silva Ingeniero Civil Industrial Mayo 2012 PDFJaviera Soledad Carmona LopezÎncă nu există evaluări
- Estructura Familiar - Electiv CPCPDocument5 paginiEstructura Familiar - Electiv CPCPSolvey Dayana RAMIREZ CEDENOÎncă nu există evaluări
- 1 comprobanteNSS PDFDocument1 pagină1 comprobanteNSS PDFJorge Arturo Linares DelgadoÎncă nu există evaluări
- Programa InvesDocument50 paginiPrograma InvesMichelleGarcía67% (3)
- 10 Especies Extintas Por El Hombre en El Siglo XXDocument5 pagini10 Especies Extintas Por El Hombre en El Siglo XXmultiservicios norexÎncă nu există evaluări
- Evaluacion para Sala de 5 AñosDocument7 paginiEvaluacion para Sala de 5 AñosVivi CrespoÎncă nu există evaluări
- Guía Evaluada Comprensión LectoraDocument3 paginiGuía Evaluada Comprensión LectoraMarcela Aravena YañezÎncă nu există evaluări
- Plantillas para DiversificarDocument4 paginiPlantillas para DiversificarRony Flores AlejandriaÎncă nu există evaluări
- Miguel de Cervantes Saavedra - La Tía FingidaDocument13 paginiMiguel de Cervantes Saavedra - La Tía FingidaErick CalderónÎncă nu există evaluări
- Sistema de HaeckelDocument8 paginiSistema de HaeckelBryan J. VasquezÎncă nu există evaluări
- Amenaza de Nuevos Competidores y Acciones para Rducir.Document2 paginiAmenaza de Nuevos Competidores y Acciones para Rducir.Gredy SalloÎncă nu există evaluări
- Sistematización de Experiencias Innovadoras - Rolando Alarcon MendezDocument13 paginiSistematización de Experiencias Innovadoras - Rolando Alarcon MendezRolando Alarcon MendezÎncă nu există evaluări
- Calendario Olimpiadas Diciembre - EneroDocument5 paginiCalendario Olimpiadas Diciembre - EneroJasmin Cruz De ZorrillaÎncă nu există evaluări
- Proyecciones de Un VectorDocument23 paginiProyecciones de Un VectorKEVIN ANTONY QUISPE COTRINAÎncă nu există evaluări
- Examen Segundo Parcial T TPM Y RCCMDocument2 paginiExamen Segundo Parcial T TPM Y RCCMmike guerreroÎncă nu există evaluări
- Guía de Diseño de ReservorioDocument59 paginiGuía de Diseño de ReservorioDiego SanchezÎncă nu există evaluări
- UntitledDocument236 paginiUntitledapi-90615243Încă nu există evaluări
- Sesion Desarrollada de ReligionDocument21 paginiSesion Desarrollada de Religionnorma Gonzales AlzamoraÎncă nu există evaluări
- Mac Tema 3Document4 paginiMac Tema 3gabriela castroÎncă nu există evaluări
- DiscusionDocument1 paginăDiscusionJorge Arturo Pisconte UzuriagaÎncă nu există evaluări
- CURSO PCP MODULO 3 Programacion JIT KANBAN Capdo - 2018-10-19 PDFDocument129 paginiCURSO PCP MODULO 3 Programacion JIT KANBAN Capdo - 2018-10-19 PDFJOHNSEDÎncă nu există evaluări
- Eslava Record AcademicoDocument2 paginiEslava Record AcademicoDanny EslavaÎncă nu există evaluări