S-ar putea să vă placă și
- Proyectos Con PICsDocument8 paginiProyectos Con PICsArmando CajahuaringaÎncă nu există evaluări
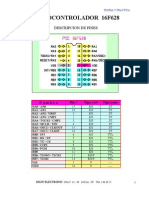
- PIC 16F628 descripción pinesDocument92 paginiPIC 16F628 descripción pinesWilliam Javier NietoÎncă nu există evaluări
- Las 35 Instrucciones Que Reconoce La CPU de Los PIC de Medio RangoDocument9 paginiLas 35 Instrucciones Que Reconoce La CPU de Los PIC de Medio RangoReinaldo MoreiraÎncă nu există evaluări
- Conexión red 2 switch PCDocument6 paginiConexión red 2 switch PCdonas_11_21Încă nu există evaluări
- P05 Programacion en MikroBasicDocument6 paginiP05 Programacion en MikroBasicJorge Luis Castillo GuarachiÎncă nu există evaluări
- 3-Estructura de MPLABDocument8 pagini3-Estructura de MPLABMorales Gio InterlomasÎncă nu există evaluări
- P09 Interface I2C PIC18FDocument7 paginiP09 Interface I2C PIC18FOscar A. PomaÎncă nu există evaluări
- Technologia MULTIPLEXAJEDocument22 paginiTechnologia MULTIPLEXAJEDiego Vergara PinoÎncă nu există evaluări
- Exposicion MicrocontroladoresDocument45 paginiExposicion MicrocontroladoresAlberto DominguezÎncă nu există evaluări
- Sistema de Interconexión Interna Arbitraje y Jerarquía de Buses TerminadoDocument39 paginiSistema de Interconexión Interna Arbitraje y Jerarquía de Buses TerminadoBiviana Katherine Rivera PeraltaÎncă nu există evaluări
- Cinetica de RobotsDocument6 paginiCinetica de RobotsCristian Salazar EspinozaÎncă nu există evaluări
- Programacion de MicrocontroladorDocument18 paginiProgramacion de MicrocontroladorDeisy Gladys Vilchez Cieza100% (1)
- Lab13 - Funciones Con PIC18F4550 - ADocument18 paginiLab13 - Funciones Con PIC18F4550 - AMichael NarcisoÎncă nu există evaluări
- Taller de MicrocontroladoresDocument5 paginiTaller de MicrocontroladoresWilson Aldana SotomonteÎncă nu există evaluări
- Microcontroladores LIBRO de REYESDocument221 paginiMicrocontroladores LIBRO de REYESDarwinÎncă nu există evaluări
- Conexión entre CPU, puente norte y periféricos en arquitectura de computadorasDocument3 paginiConexión entre CPU, puente norte y periféricos en arquitectura de computadorasnatas_marangasnÎncă nu există evaluări
- Proyectos Microcode Studio PlusDocument151 paginiProyectos Microcode Studio PlusDJ-Roger Valdivia0% (1)
- Conjunto de Instrucciones... PICDocument20 paginiConjunto de Instrucciones... PICJose Eduardo Pumarejo GarciaÎncă nu există evaluări
- Manual 2 de Pic en Español 2019Document114 paginiManual 2 de Pic en Español 2019Sergio Dario ChavezÎncă nu există evaluări
- Evaluacion Arquitectura de HardwareDocument3 paginiEvaluacion Arquitectura de HardwareRafl Moke33% (3)
- Punta lógica TTLDocument5 paginiPunta lógica TTLGustavo Burbano100% (1)
- 1.la Familia de Microcontroladores Pic 18fxxxDocument41 pagini1.la Familia de Microcontroladores Pic 18fxxxElias Merida AlmanzaÎncă nu există evaluări
- Microcode Studio PlusDocument4 paginiMicrocode Studio Plusmd_corona62Încă nu există evaluări
- Unidad III. - El Procesador Parte IDocument30 paginiUnidad III. - El Procesador Parte IrafaelmezagÎncă nu există evaluări
- Práctica CPUDocument5 paginiPráctica CPUJuan Paulo Lopez AvilaÎncă nu există evaluări
- Microcontroladores guíaDocument38 paginiMicrocontroladores guíaGaby Ramos NavaÎncă nu există evaluări
- Simulación de microcontroladores PIC con MPLABDocument8 paginiSimulación de microcontroladores PIC con MPLABHector David VegaÎncă nu există evaluări
- Información Sobre Las Funciones de ESP32 y Su Uso Con Arduino IDE (Pasos Sencillos)Document21 paginiInformación Sobre Las Funciones de ESP32 y Su Uso Con Arduino IDE (Pasos Sencillos)Dario KlugÎncă nu există evaluări
- Arquitectura microcontroladores componentesDocument21 paginiArquitectura microcontroladores componentesAna Lopez AlonsoÎncă nu există evaluări
- Microcontrolador COP8 PDFDocument110 paginiMicrocontrolador COP8 PDFEmmanuelAraujoÎncă nu există evaluări
- Diagnosis Nissan SentraDocument1 paginăDiagnosis Nissan Sentradavid orellana100% (1)
- Tutorial Pic Usb JavaDocument136 paginiTutorial Pic Usb Javafenix_master10Încă nu există evaluări
- 2.2.1 Semana 8 - CANDocument44 pagini2.2.1 Semana 8 - CANpakopollo700Încă nu există evaluări
- Sistemas Digitales Basados en MicrocontroladoresDocument172 paginiSistemas Digitales Basados en MicrocontroladoresJoseÎncă nu există evaluări
- Programación de PIC18F4550 mediante Bootloader USBDocument6 paginiProgramación de PIC18F4550 mediante Bootloader USBRubenSilvaÎncă nu există evaluări
- Grabacion de Las FLASH y EEPROMDocument7 paginiGrabacion de Las FLASH y EEPROMkapri1001Încă nu există evaluări
- Pic Gama Media PDFDocument197 paginiPic Gama Media PDFadalavi100% (1)
- CONTROL MOTOR PASO A PASODocument12 paginiCONTROL MOTOR PASO A PASOFé Gabriela100% (1)
- Investigación Temario - Tema 1 MicrocontroladoresDocument21 paginiInvestigación Temario - Tema 1 MicrocontroladoresDaniel GomezÎncă nu există evaluări
- Pic 16F877 2Document67 paginiPic 16F877 2Dan Tabarez100% (1)
- Arquitectura MicrocontroladoresDocument61 paginiArquitectura MicrocontroladoresSamuel Abraham Medina GonzálezÎncă nu există evaluări
- Control de Motores Paso A Paso Por El Puerto Paralelo Del PCDocument5 paginiControl de Motores Paso A Paso Por El Puerto Paralelo Del PCanarkia54100% (2)
- Arquitectura Interna Del MicrocontroladorDocument9 paginiArquitectura Interna Del MicrocontroladorUriel SolisÎncă nu există evaluări
- Transistores Como AmplificadoresDocument10 paginiTransistores Como AmplificadoresAlejo TabaresÎncă nu există evaluări
- Lección #8 - Control de Actuadores Por ComputadoraDocument12 paginiLección #8 - Control de Actuadores Por ComputadoraRichard PolÎncă nu există evaluări
- Configurar El BlueTooh HC-05Document29 paginiConfigurar El BlueTooh HC-05Sara Lucia Rueda JaramilloÎncă nu există evaluări
- P04 Arrancador Serial Mikrobootloader PIC18F4550 PDFDocument6 paginiP04 Arrancador Serial Mikrobootloader PIC18F4550 PDFJhonattan PortugalÎncă nu există evaluări
- Diferencias Entre Memoria RAM y ROMDocument7 paginiDiferencias Entre Memoria RAM y ROMjuanÎncă nu există evaluări
- SpiDocument10 paginiSpiJuan Carlos ValdiviezoÎncă nu există evaluări
- La Memoria RomDocument10 paginiLa Memoria RomCarlos PablosÎncă nu există evaluări
- Exprimidor Cítricos Z450 950l/h $181kDocument6 paginiExprimidor Cítricos Z450 950l/h $181kKarol PoloÎncă nu există evaluări
- Compuertas digitales de colector abierto y conexiones Y cableadoDocument3 paginiCompuertas digitales de colector abierto y conexiones Y cableadoVic VigaÎncă nu există evaluări
- Ms DOSDocument6 paginiMs DOSMonserrat Brenda MondragonÎncă nu există evaluări
- Catálogo y Diseño 10 DispositivosDocument7 paginiCatálogo y Diseño 10 DispositivosEsteban PáezÎncă nu există evaluări
- Apuntes Introduccion A Los MicrocontroladoresDocument62 paginiApuntes Introduccion A Los MicrocontroladoresJose Carlos OsÎncă nu există evaluări
- Reporte Proyecto PIC16F877A MicrocontroladorDocument30 paginiReporte Proyecto PIC16F877A MicrocontroladorGerman RodriguezÎncă nu există evaluări
- Curso de Pic (Saber Electronica) PDFDocument32 paginiCurso de Pic (Saber Electronica) PDFAdan Yohali SánchezÎncă nu există evaluări
- Cuestionario Electrónica Digital AplicadaDocument6 paginiCuestionario Electrónica Digital AplicadaCarlos MartinezÎncă nu există evaluări
- Laboratorio - 5 - DEMOQE128 Y PiC Manejo de InterrupcionesDocument26 paginiLaboratorio - 5 - DEMOQE128 Y PiC Manejo de InterrupcionesdiegoÎncă nu există evaluări
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe la EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaÎncă nu există evaluări
- CAPÍTULO 2. - Marco General de La Gestión de Un Proyecto VialDocument63 paginiCAPÍTULO 2. - Marco General de La Gestión de Un Proyecto VialJhony CotaÎncă nu există evaluări
- Ley Ohm Laboratorio BioDocument6 paginiLey Ohm Laboratorio BioLaura Daniela Patino CamargoÎncă nu există evaluări
- BIOGRAFIASDocument14 paginiBIOGRAFIASjovitodegraciahÎncă nu există evaluări
- Ondas Sismicas e Intensidad y Magnitud de SismosDocument7 paginiOndas Sismicas e Intensidad y Magnitud de SismosJulio César Rodríguez AyquipaÎncă nu există evaluări
- DNS-320L A3 Manual v1.20 (ES)Document443 paginiDNS-320L A3 Manual v1.20 (ES)Mario Alberto Gonzalez PeñalverÎncă nu există evaluări
- Aprovechamiento de Una Calamidad. Artículo 12 #10 Código Penal Chileno.Document2 paginiAprovechamiento de Una Calamidad. Artículo 12 #10 Código Penal Chileno.Francisco Javier Maureira P.Încă nu există evaluări
- Caso Clinico 03 - CX II OtorrinoDocument13 paginiCaso Clinico 03 - CX II OtorrinoJose Romero BecerraÎncă nu există evaluări
- Hit A Lopez FranciscoDocument46 paginiHit A Lopez FranciscoOshitha HemozhaaÎncă nu există evaluări
- SQL ServerDocument11 paginiSQL ServerAlex Chambi0% (1)
- "SOFÍA" - Carpeta de Producción EjemploDocument40 pagini"SOFÍA" - Carpeta de Producción Ejemplofershi2902Încă nu există evaluări
- Caso Clínico #2Document42 paginiCaso Clínico #2Ancla QbÎncă nu există evaluări
- Balance de Materia para Los EquiposDocument11 paginiBalance de Materia para Los EquiposAnyela Lucero Manrique CastroÎncă nu există evaluări
- Marketing VisualDocument3 paginiMarketing Visualpatricia_3400Încă nu există evaluări
- Sesiones para MAYOOODocument56 paginiSesiones para MAYOOODenisse PortÎncă nu există evaluări
- Proyecto Segundo Corte Probabiliad y EstadisticaDocument6 paginiProyecto Segundo Corte Probabiliad y EstadisticaEMILIANO ESCALANTE SALASÎncă nu există evaluări
- Sistema nervioso: Estructura, tipos de neuronas y funcionesDocument32 paginiSistema nervioso: Estructura, tipos de neuronas y funcionesJuly SotoÎncă nu există evaluări
- 3533-Texto Del Artículo-12160-2-10-20191107Document17 pagini3533-Texto Del Artículo-12160-2-10-20191107MaTeresa Pejó DuráÎncă nu există evaluări
- Sintesis Aprender A Escuchar, Aprender A Hablar de VernonDocument4 paginiSintesis Aprender A Escuchar, Aprender A Hablar de VernonCristina Abh100% (2)
- LL - DiagnosticoDocument6 paginiLL - DiagnosticoAlexito AlvaradoÎncă nu există evaluări
- Estudio Impacto Ambiental Curtiduría El PorvenirDocument39 paginiEstudio Impacto Ambiental Curtiduría El PorvenirLeandro Vasquez LedesmaÎncă nu există evaluări
- AbpDocument6 paginiAbpDaniel DoradoÎncă nu există evaluări
- Tostao Tarea Académica 1Document11 paginiTostao Tarea Académica 1Jaime D la CruzÎncă nu există evaluări
- Teorías del todo y la realidad dependiente de modelosDocument4 paginiTeorías del todo y la realidad dependiente de modelosAika SuloÎncă nu există evaluări
- Introduccion A La Geometri ADocument3 paginiIntroduccion A La Geometri ASusy BelussiÎncă nu există evaluări
- Qué Es El Ordenamiento TerritorialDocument2 paginiQué Es El Ordenamiento TerritoriallicethÎncă nu există evaluări
- Agitadores y AcondicionadoresDocument11 paginiAgitadores y AcondicionadoresDelfinLeonHanccoÎncă nu există evaluări
- T1 - Grupo - 09 (Hernán Arboleda - Michell Ortíz)Document4 paginiT1 - Grupo - 09 (Hernán Arboleda - Michell Ortíz)Niicolas EscobarrÎncă nu există evaluări
- Valvulas de DesaceleracionDocument3 paginiValvulas de DesaceleracionShiru LayanÎncă nu există evaluări
- Prueba Quinto Basico Un. 5Document4 paginiPrueba Quinto Basico Un. 5nicolegutierrezpalmaÎncă nu există evaluări
- MM 5° Jomi 28-09 PDFDocument41 paginiMM 5° Jomi 28-09 PDFMonica Rangel GalvanÎncă nu există evaluări