S-ar putea să vă placă și
- Text That Girl Cheat Sheet NewDocument25 paginiText That Girl Cheat Sheet NewfhgfghgfhÎncă nu există evaluări
- K-Means Clustering and The Iris Plan DatasetDocument7 paginiK-Means Clustering and The Iris Plan DatasetMonique Kirkman-BeyÎncă nu există evaluări
- HW Chapter 15Document5 paginiHW Chapter 15Pornpunsa WuttisanwattanaÎncă nu există evaluări
- Simulation Exercises-1Document2 paginiSimulation Exercises-1Nishan ShettyÎncă nu există evaluări
- Matlab Installation Guide - R2016bDocument10 paginiMatlab Installation Guide - R2016bMohammed Abdul HaiÎncă nu există evaluări
- Jpfisikadd140628 PDFDocument6 paginiJpfisikadd140628 PDFwiwit nurmaya sariÎncă nu există evaluări
- Proposal KKN Jatirejo FixDocument35 paginiProposal KKN Jatirejo FixNaila Faza KamilaÎncă nu există evaluări
- ExamplesDocument5 paginiExamplesanjanaÎncă nu există evaluări
- EE Homework - Partially CompletedDocument8 paginiEE Homework - Partially CompletedRickÎncă nu există evaluări
- ATV12 Communication Parameters BBV51917 1.4IE05bDocument12 paginiATV12 Communication Parameters BBV51917 1.4IE05bRicardo Rodriguez ParedesÎncă nu există evaluări
- Alat Seismograf Micro EarthquakeDocument4 paginiAlat Seismograf Micro EarthquakedeadromeoÎncă nu există evaluări
- Chap 11Document18 paginiChap 11ashinkumarjerÎncă nu există evaluări
- Soal UAS Medan ElektromagnetikDocument4 paginiSoal UAS Medan ElektromagnetikAnonymous 6RROMwQVÎncă nu există evaluări
- Automatic Braking System in E-BikesDocument14 paginiAutomatic Braking System in E-BikesPranesh.MÎncă nu există evaluări
- Data Sheet Pompa SentrifugalDocument2 paginiData Sheet Pompa Sentrifugalsiaga 1Încă nu există evaluări
- Laporan Praktikum Jaringan Telekomunikasi I-KELOMPOK6-FITUR TELEPONDocument52 paginiLaporan Praktikum Jaringan Telekomunikasi I-KELOMPOK6-FITUR TELEPONjariatus amaliaÎncă nu există evaluări
- Counter Using LDRDocument19 paginiCounter Using LDRCha KuÎncă nu există evaluări
- Simulasi Dan Analisis Cycloconverter 3 FasaDocument56 paginiSimulasi Dan Analisis Cycloconverter 3 Fasawahyu febriyantoÎncă nu există evaluări
- Deteksi Kerusakan Motor InduksiDocument7 paginiDeteksi Kerusakan Motor InduksifaturÎncă nu există evaluări
- Kumpul Modul 2Document107 paginiKumpul Modul 2InnabilaÎncă nu există evaluări
- Mikon TugasDocument38 paginiMikon TugasAsteriPurnomoÎncă nu există evaluări
- Control SystemDocument3 paginiControl SystemVivek MukundanÎncă nu există evaluări
- Lab Digital Jobsheet 1-16Document38 paginiLab Digital Jobsheet 1-16Galih BahteraÎncă nu există evaluări
- Bahasa Inggris Multimeter Analog PresentasiDocument17 paginiBahasa Inggris Multimeter Analog PresentasiFirda Firda OoaalaaÎncă nu există evaluări
- Getting Started MobosimDocument4 paginiGetting Started MobosimRudy RachidaÎncă nu există evaluări
- UEEA2413 Tutorial 1Document2 paginiUEEA2413 Tutorial 1Wee LiangÎncă nu există evaluări
- Aliran Inviscid IncompresibleDocument27 paginiAliran Inviscid IncompresibleTony Redzza Saputra100% (1)
- Parallel AdderDocument20 paginiParallel AddermdbelalrshdÎncă nu există evaluări
- Torque-Speed Characteristic Induction Motor Plot: M-File MatlabDocument2 paginiTorque-Speed Characteristic Induction Motor Plot: M-File MatlabGiorgio Rendra VilariZ'tÎncă nu există evaluări
- Cussons Boiler Instructon ManualDocument32 paginiCussons Boiler Instructon Manualjakakolenk100% (1)
- Laporan Praktikum ItsDocument61 paginiLaporan Praktikum ItsrizkaÎncă nu există evaluări
- Perhitungan Titik Lampu Pada MasjidDocument2 paginiPerhitungan Titik Lampu Pada MasjidFerdiÎncă nu există evaluări
- Patient Medical Transcript C++ Mini ProjectDocument9 paginiPatient Medical Transcript C++ Mini ProjectAzmi Bin A MataliÎncă nu există evaluări
- Flowchart Rumus ABCDocument2 paginiFlowchart Rumus ABCPandy MaÎncă nu există evaluări
- Pengaruh Debit Aliran Dan Kemiringan Poros Turbin Ulir Pada Pembangkit Listrik Tenaga Mikro-HidroDocument5 paginiPengaruh Debit Aliran Dan Kemiringan Poros Turbin Ulir Pada Pembangkit Listrik Tenaga Mikro-HidrocomeklÎncă nu există evaluări
- Hasil Tep 2022 - Teknik ElektroDocument23 paginiHasil Tep 2022 - Teknik ElektroKevin Pravdha AÎncă nu există evaluări
- Soal LatihanDocument2 paginiSoal LatihanGebyÎncă nu există evaluări
- Common Emitter Un Bypassed Emitter - Fixed Bias ConfigurationDocument14 paginiCommon Emitter Un Bypassed Emitter - Fixed Bias ConfigurationForge lastÎncă nu există evaluări
- Contoh Soal Root LocusDocument4 paginiContoh Soal Root LocusMamat SeptyanÎncă nu există evaluări
- Pipa UdaraDocument69 paginiPipa UdaraPutu Widhi ApriliaÎncă nu există evaluări
- Intelligent Automatic Plant Irrigation SystemDocument7 paginiIntelligent Automatic Plant Irrigation Systemsampath kumar100% (1)
- Perhitungan Flyback ConverterDocument4 paginiPerhitungan Flyback ConverterMardian SatriaÎncă nu există evaluări
- TTL Kuliah 4 Mesin DCDocument87 paginiTTL Kuliah 4 Mesin DCIntan Puri RahayuÎncă nu există evaluări
- Jurnal MikrometerDocument5 paginiJurnal MikrometerDwi AgustinaÎncă nu există evaluări
- Laporan Praktikum Modul 4 Multiplexer Dan DemultiplexerDocument14 paginiLaporan Praktikum Modul 4 Multiplexer Dan DemultiplexerAbdul azisÎncă nu există evaluări
- Malvino Bab 4Document16 paginiMalvino Bab 4Muhammad Fahrur Rozi100% (1)
- Makalah Line Tracking Robot (By Opick Hidayato)Document36 paginiMakalah Line Tracking Robot (By Opick Hidayato)Opick HidayatoÎncă nu există evaluări
- Lab 3. DHT11Document5 paginiLab 3. DHT11Maten NasradinÎncă nu există evaluări
- Comparison of The Markowitz and Single Index Model Based On M-V Criterion in Optimal Portfolio FormationDocument6 paginiComparison of The Markowitz and Single Index Model Based On M-V Criterion in Optimal Portfolio FormationPavan KumarÎncă nu există evaluări
- Lab 1Document4 paginiLab 1Abdalla Fathy100% (1)
- Katalog PT Gunung Garuda Steel WF ProfileDocument4 paginiKatalog PT Gunung Garuda Steel WF ProfileibnugantengÎncă nu există evaluări
- Print OkDocument5 paginiPrint Okmafud100% (1)
- Mapping Questioner (Responses)Document11 paginiMapping Questioner (Responses)Agung Ferdiansyah0% (2)
- Laporan HS2 02 - OUTPUT Bag2Document5 paginiLaporan HS2 02 - OUTPUT Bag2Gyan Popong EkasatriaÎncă nu există evaluări
- Open and Close Loop SystemDocument27 paginiOpen and Close Loop Systemnagendrakushwaha007Încă nu există evaluări
- Beginners Guide To RobotCDocument17 paginiBeginners Guide To RobotCUmmu SolahÎncă nu există evaluări
- NCStudio CNC Router ManualV4.4Document31 paginiNCStudio CNC Router ManualV4.4pejic1722Încă nu există evaluări
- DanteDocument69 paginiDante8tswshgtmtÎncă nu există evaluări
- DR-Visual LogicDocument6 paginiDR-Visual LogicmuxzÎncă nu există evaluări
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesDe la EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesEvaluare: 5 din 5 stele5/5 (1)
- Daftar PustakaDocument3 paginiDaftar PustakarnepologyÎncă nu există evaluări
- DOE Fundamentals Handbook, Electrical Science, Volume 1 of 4Document166 paginiDOE Fundamentals Handbook, Electrical Science, Volume 1 of 4Bob VinesÎncă nu există evaluări
- Atmega8 SourceCodeDocument37 paginiAtmega8 SourceCodernepologyÎncă nu există evaluări
- Avr Libc User Manual 1.0.4Document187 paginiAvr Libc User Manual 1.0.4NikanoorÎncă nu există evaluări
- Programming Atmega Using Boot LoaderDocument4 paginiProgramming Atmega Using Boot LoaderrnepologyÎncă nu există evaluări
- CM 510Document8 paginiCM 510rnepologyÎncă nu există evaluări
- Hydrogen Plug-In Hybrid Electric Vehicle (PHEV) R&D PlanDocument44 paginiHydrogen Plug-In Hybrid Electric Vehicle (PHEV) R&D Planmojicap100% (11)
- General Electric/ Massachusetts State Records Request Response Part 3Document673 paginiGeneral Electric/ Massachusetts State Records Request Response Part 3Gintautas DumciusÎncă nu există evaluări
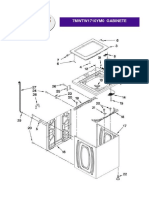
- 7MWTW1710YM0Document8 pagini7MWTW1710YM0Izack-Dy JimZitÎncă nu există evaluări
- Techgig Open Round CompetitionDocument6 paginiTechgig Open Round CompetitionAnil Kumar GodishalaÎncă nu există evaluări
- You Wouldnt Want To Sail On A 19th-Century Whaling Ship 33 Grisly EnglishareDocument36 paginiYou Wouldnt Want To Sail On A 19th-Century Whaling Ship 33 Grisly EnglishareDušan MićovićÎncă nu există evaluări
- Southport Minerals CombinedDocument20 paginiSouthport Minerals CombinedEshesh GuptaÎncă nu există evaluări
- (1895) Indianapolis Police ManualDocument122 pagini(1895) Indianapolis Police ManualHerbert Hillary Booker 2ndÎncă nu există evaluări
- A Comprehensive Review On Renewable and Sustainable Heating Systems For Poultry FarmingDocument22 paginiA Comprehensive Review On Renewable and Sustainable Heating Systems For Poultry FarmingPl TorrÎncă nu există evaluări
- PRI SSC TutorialDocument44 paginiPRI SSC TutorialSantosh NarayanÎncă nu există evaluări
- Millets: Future of Food & FarmingDocument16 paginiMillets: Future of Food & FarmingKIRAN100% (2)
- Assignment 03 Investments in Debt SecuritiesDocument4 paginiAssignment 03 Investments in Debt SecuritiesJella Mae YcalinaÎncă nu există evaluări
- Newton Gauss MethodDocument37 paginiNewton Gauss MethodLucas WeaverÎncă nu există evaluări
- Summative-Test-3-5 Tve ExploratoryDocument3 paginiSummative-Test-3-5 Tve ExploratoryMjnicole MartejaÎncă nu există evaluări
- Farmers' Satisfaction With The Paddy Procurement Practices of The National Food Authority in The Province of Palawan, PhilippinesDocument13 paginiFarmers' Satisfaction With The Paddy Procurement Practices of The National Food Authority in The Province of Palawan, PhilippinesPsychology and Education: A Multidisciplinary JournalÎncă nu există evaluări
- Application Form-Nguyen Huy CuongDocument4 paginiApplication Form-Nguyen Huy Cuongapi-3798114Încă nu există evaluări
- Student Application Form BCIS - 2077Document2 paginiStudent Application Form BCIS - 2077Raaz Key Run ChhatkuliÎncă nu există evaluări
- 4 FAR EAST BANK & TRUST COMPANY V DIAZ REALTY INCDocument3 pagini4 FAR EAST BANK & TRUST COMPANY V DIAZ REALTY INCDanielleÎncă nu există evaluări
- Year Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2Document2 paginiYear Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2juanchingarÎncă nu există evaluări
- Project Guidelines (Issued by CBSE) : CA. (DR.) G.S. GrewalDocument51 paginiProject Guidelines (Issued by CBSE) : CA. (DR.) G.S. GrewalShruti Yadav0% (1)
- Reterta V MoresDocument13 paginiReterta V MoresRam Migue SaintÎncă nu există evaluări
- Factors Affecting The Implementation of Green Procurement: Empirical Evidence From Indonesian Educational InstitutionDocument12 paginiFactors Affecting The Implementation of Green Procurement: Empirical Evidence From Indonesian Educational InstitutionYeni Saro ManaluÎncă nu există evaluări
- Negative Sequence Current in Wind Turbines Type 3 1637954804Document6 paginiNegative Sequence Current in Wind Turbines Type 3 1637954804Chandra R. SirendenÎncă nu există evaluări
- 2023-2024 Draft Benzie County Budget BookDocument91 pagini2023-2024 Draft Benzie County Budget BookColin MerryÎncă nu există evaluări
- LG+32LX330C Ga LG5CBDocument55 paginiLG+32LX330C Ga LG5CBjampcarlosÎncă nu există evaluări
- Nepal CountryReport PDFDocument64 paginiNepal CountryReport PDFnickdash09Încă nu există evaluări
- "Laughter Is Part of The Human Survival Kit. : David NathanDocument4 pagini"Laughter Is Part of The Human Survival Kit. : David NathanTrang NhungÎncă nu există evaluări
- Hospital Management System DatabaseDocument18 paginiHospital Management System DatabasesamdhathriÎncă nu există evaluări
- 1491559890CL 0417 PDFDocument48 pagini1491559890CL 0417 PDFCoolerAdsÎncă nu există evaluări
- IMS DB Interview Questions: Beginner LevelDocument19 paginiIMS DB Interview Questions: Beginner LevelsudhakarcheedaraÎncă nu există evaluări
- Power Dense and Robust Traction Power Inverter For The Second Generation Chevrolet Volt Extended Range EDocument8 paginiPower Dense and Robust Traction Power Inverter For The Second Generation Chevrolet Volt Extended Range Ejrz000Încă nu există evaluări