S-ar putea să vă placă și
- ECE321 Lab3Document9 paginiECE321 Lab3Ha Tran KhiemÎncă nu există evaluări
- 6.0ah LiFePO4 Cell SpecificationDocument10 pagini6.0ah LiFePO4 Cell SpecificationГригорійÎncă nu există evaluări
- 271 - PH8252 Physics For Information Science - Notes UNIT IV OPTICAL PROPERTIES OF MATERIALS PDFDocument66 pagini271 - PH8252 Physics For Information Science - Notes UNIT IV OPTICAL PROPERTIES OF MATERIALS PDFHari100% (1)
- 1 Basic Principles: 1.1 Power in Single-Phase AC CircuitsDocument9 pagini1 Basic Principles: 1.1 Power in Single-Phase AC CircuitsDharamÎncă nu există evaluări
- Electronic Devices Experiment 4Document13 paginiElectronic Devices Experiment 4ArvinALÎncă nu există evaluări
- Experiment No.02 To Observe The Characteristics of A Half Wave RectifierDocument4 paginiExperiment No.02 To Observe The Characteristics of A Half Wave RectifierWaqas MughalÎncă nu există evaluări
- Low Power Boost Converter For Portable Applications by Eddy Wells and Mark JordanDocument9 paginiLow Power Boost Converter For Portable Applications by Eddy Wells and Mark JordanberbouÎncă nu există evaluări
- Electrical Circuit Lab ManualDocument38 paginiElectrical Circuit Lab Manualecessec67% (3)
- Edc Project Report: Prof. Garima SolankiDocument32 paginiEdc Project Report: Prof. Garima SolankiAnime X100% (1)
- Typical Rod Gap ArresterDocument11 paginiTypical Rod Gap ArresterMuhammad Asif Iqbal100% (1)
- Physics Investigatory ProjectDocument12 paginiPhysics Investigatory ProjectPratham SonthaliaÎncă nu există evaluări
- Lab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterDocument6 paginiLab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterSadil BatafÎncă nu există evaluări
- (ACTA Universitatis Cibiniensis) Testing The Performance of A Single-Phase Autotransformer On MATLABSimulinkDocument6 pagini(ACTA Universitatis Cibiniensis) Testing The Performance of A Single-Phase Autotransformer On MATLABSimulinkbeimanalfredoÎncă nu există evaluări
- LAB 5A Single Phase Current Transformer PDFDocument6 paginiLAB 5A Single Phase Current Transformer PDFHumayun ArshadÎncă nu există evaluări
- LED Lamp Dimmer CircuitDocument3 paginiLED Lamp Dimmer CircuitashishÎncă nu există evaluări
- PN Zenernv6501Document47 paginiPN Zenernv6501Madhur Patidar0% (1)
- Multi LVL DC DC BoostDocument9 paginiMulti LVL DC DC BoostDurga PrathibhaÎncă nu există evaluări
- Electronics Lab Exp3 PDFDocument17 paginiElectronics Lab Exp3 PDFgacc4sitesÎncă nu există evaluări
- Novel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreDocument11 paginiNovel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreHollie RosaÎncă nu există evaluări
- Step-Down Cycloconverter Explained - Electrical ConceptsDocument5 paginiStep-Down Cycloconverter Explained - Electrical ConceptsMohammad HamamdÎncă nu există evaluări
- Lab 4 Half Wave and Full WaveDocument8 paginiLab 4 Half Wave and Full WaveRashid Rind Rashid Rind100% (1)
- Lab ReportDocument15 paginiLab Reportaeoliano0% (1)
- Slup 129Document11 paginiSlup 129Sameer NandanÎncă nu există evaluări
- Diode RectifiersDocument23 paginiDiode Rectifierskaliman2010Încă nu există evaluări
- ZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterDocument6 paginiZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterPradhapndk100% (1)
- التحكم في سرعة محركات التيار المستمرDocument21 paginiالتحكم في سرعة محركات التيار المستمرSantiagoo4life AliÎncă nu există evaluări
- Slides For Multi Level Inverter in Psim PDFDocument41 paginiSlides For Multi Level Inverter in Psim PDFmuhammad saeedÎncă nu există evaluări
- Nonlinear Peltier Effect in Semiconductors.Document4 paginiNonlinear Peltier Effect in Semiconductors.danielglezaÎncă nu există evaluări
- Adaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemDocument9 paginiAdaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemIAES IJPEDSÎncă nu există evaluări
- VI Characteristics of DiodeDocument5 paginiVI Characteristics of DiodeRashid Rind Rashid RindÎncă nu există evaluări
- Benn Machine Lab ManualDocument14 paginiBenn Machine Lab ManualRahatullah Khan100% (1)
- Single Phase Transformers Wake-Up Questions (To Be Practiced For VIVA in LAB)Document4 paginiSingle Phase Transformers Wake-Up Questions (To Be Practiced For VIVA in LAB)Shivam SinghÎncă nu există evaluări
- 2015 Summer Model Answer PaperDocument32 pagini2015 Summer Model Answer PaperIvan-Jeff AlcantaraÎncă nu există evaluări
- 25510-A New Calculation For Designing Multilayer Planar Spiral Inductors PDF PDFDocument4 pagini25510-A New Calculation For Designing Multilayer Planar Spiral Inductors PDF PDFAnonymous Kti5jq5EJIÎncă nu există evaluări
- Bridge Rectifier - Definition, Construction and WorkingDocument14 paginiBridge Rectifier - Definition, Construction and WorkingRamKumarÎncă nu există evaluări
- Colpitts OscillatorDocument2 paginiColpitts OscillatorSami584Încă nu există evaluări
- Generation of High DC, AC, Impulse Voltages and Currents - Tripping and Control of Impulse GeneratorsDocument14 paginiGeneration of High DC, AC, Impulse Voltages and Currents - Tripping and Control of Impulse GeneratorssaiÎncă nu există evaluări
- What Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?Document14 paginiWhat Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?BALAJIÎncă nu există evaluări
- Final ThesisDocument62 paginiFinal ThesisTemesgen TolchaÎncă nu există evaluări
- (Single+Three) Phase Induction Motors Interview Questions SetDocument18 pagini(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeÎncă nu există evaluări
- Example 3.1 Finding The Performance Parameters of A Full-Wave Rectifier With A Center-Tapped TransformerDocument4 paginiExample 3.1 Finding The Performance Parameters of A Full-Wave Rectifier With A Center-Tapped TransformersoberÎncă nu există evaluări
- Topik 5 - Introduction To Other Semiconductor ComponentsDocument27 paginiTopik 5 - Introduction To Other Semiconductor ComponentsfaizahÎncă nu există evaluări
- Full Wave RectifierDocument7 paginiFull Wave RectifierArun PratapÎncă nu există evaluări
- EE 555 - Renewable Energy Systems - Hassan Abbas Khan PDFDocument3 paginiEE 555 - Renewable Energy Systems - Hassan Abbas Khan PDFWajahat Ullah Khan TareenÎncă nu există evaluări
- Star-Delta and Delta-Star TransformationsDocument19 paginiStar-Delta and Delta-Star TransformationsDossDossÎncă nu există evaluări
- Metal-Semiconductor Junctions: SOLA2060 Introduction To Electronic Devices Semester 1, 2019Document24 paginiMetal-Semiconductor Junctions: SOLA2060 Introduction To Electronic Devices Semester 1, 2019Marquee BrandÎncă nu există evaluări
- Solid State Drives Short BookDocument48 paginiSolid State Drives Short BookGomathi Raja MÎncă nu există evaluări
- Unit 2Document98 paginiUnit 2MR. SUSHIL BARAPATREÎncă nu există evaluări
- ThyristorsDocument53 paginiThyristorsKashyap ChintuÎncă nu există evaluări
- Automatic Control of Street LightDocument63 paginiAutomatic Control of Street LightMani RaoÎncă nu există evaluări
- Power Electronic Module - Chapter 5Document36 paginiPower Electronic Module - Chapter 5jayxcellÎncă nu există evaluări
- Matlab Saturable Transformer PDFDocument10 paginiMatlab Saturable Transformer PDFgeorge_cpp2Încă nu există evaluări
- Standard Hydrogen ElectrodeDocument2 paginiStandard Hydrogen ElectrodeAmmara Amy100% (1)
- Utilisation of Electrical Energy - 9087Document7 paginiUtilisation of Electrical Energy - 9087Nilesh MahajanÎncă nu există evaluări
- Modeling of DC DC Converter PDFDocument6 paginiModeling of DC DC Converter PDFVishal AryaÎncă nu există evaluări
- Testing of DC Machines - UNIT IIIDocument34 paginiTesting of DC Machines - UNIT IIIKUMAR SÎncă nu există evaluări
- ZsiDocument7 paginiZsimuralimallikaÎncă nu există evaluări
- Z-Source Inverter: Figure 3.1: The General Configuration of A Z-Source ConverterDocument7 paginiZ-Source Inverter: Figure 3.1: The General Configuration of A Z-Source Converterabhikesh waleÎncă nu există evaluări
- A Transient Performance Analysis For Vector Controlled Z-Source Inverter Fed Induction Motor DriveDocument7 paginiA Transient Performance Analysis For Vector Controlled Z-Source Inverter Fed Induction Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Performance Analysis of Z Source Inverter Fed Induction Motor DriveDocument6 paginiPerformance Analysis of Z Source Inverter Fed Induction Motor DriveNagulapati KiranÎncă nu există evaluări
- Z Source Inverter and Its Application.Document12 paginiZ Source Inverter and Its Application.handyenggÎncă nu există evaluări
- Electrical Conduit SizesDocument1 paginăElectrical Conduit SizesNerie RangelÎncă nu există evaluări
- DENSO Brushless Alt SpecsDocument1 paginăDENSO Brushless Alt SpecsmnvijaybabuÎncă nu există evaluări
- AVR1A Voltage Sensing RelayDocument2 paginiAVR1A Voltage Sensing Relaysulaimani keedaÎncă nu există evaluări
- CM200DY-24H: Mitsubishi Igbt ModulesDocument5 paginiCM200DY-24H: Mitsubishi Igbt ModulesIlian AvramovÎncă nu există evaluări
- PDU DescriptionDocument17 paginiPDU DescriptionMustafa RasoolÎncă nu există evaluări
- Hospital WiringDocument4 paginiHospital WiringCam ElectricÎncă nu există evaluări
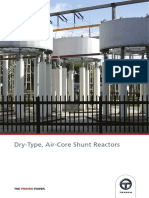
- Dry-Type, Air-Core Shunt Reactors: ProvenDocument8 paginiDry-Type, Air-Core Shunt Reactors: ProvenWardencasianAlanisÎncă nu există evaluări
- Solid State Electronic Devices - D. K. Bhattacharya and R. Sharma PDFDocument94 paginiSolid State Electronic Devices - D. K. Bhattacharya and R. Sharma PDFSusmita GangulyÎncă nu există evaluări
- ED099507Document136 paginiED099507JosueÎncă nu există evaluări
- 3Document9 pagini3ING. RUBENSÎncă nu există evaluări
- BTS100Document10 paginiBTS100VasyaÎncă nu există evaluări
- Lab-04 DC Electronics Part 2Document8 paginiLab-04 DC Electronics Part 2pioneer boysÎncă nu există evaluări
- TX ProtectionDocument60 paginiTX ProtectionKhay SaadÎncă nu există evaluări
- Generator Protection CoordinationDocument6 paginiGenerator Protection Coordinationb33lawÎncă nu există evaluări
- Datasheet IBB SystemsDocument4 paginiDatasheet IBB SystemsLaura Daniela GavrilasÎncă nu există evaluări
- Lec 6-7 TransformerDocument92 paginiLec 6-7 TransformerTajammul NasiriÎncă nu există evaluări
- Medium-Voltage Fuses 3 KV - 40.5 KV, 0.5 A - 315 A: Distribution SolutionsDocument76 paginiMedium-Voltage Fuses 3 KV - 40.5 KV, 0.5 A - 315 A: Distribution SolutionsGokul VenugopalÎncă nu există evaluări
- Siemens Mammomat 1000 3000 Service ManualDocument75 paginiSiemens Mammomat 1000 3000 Service ManualIchraq NouarÎncă nu există evaluări
- Analog Communication AM DemodulatorsDocument2 paginiAnalog Communication AM DemodulatorsGOHIL AJAYKUMAR SHANKARBHAIÎncă nu există evaluări
- L2 Basic Principles DC - DCDocument55 paginiL2 Basic Principles DC - DCjoa91189Încă nu există evaluări
- 800MW TG O&M Manual YeramarusDocument321 pagini800MW TG O&M Manual YeramarusArvind Shukla100% (5)
- Tonepad Orangesqueezer2Document1 paginăTonepad Orangesqueezer2Marco AurelioÎncă nu există evaluări
- Danfoss MBS33Document5 paginiDanfoss MBS33Karlos MaiaÎncă nu există evaluări
- 4-20 Ma To Current Converter: P/N: IC-DR-XX and AX130300Document3 pagini4-20 Ma To Current Converter: P/N: IC-DR-XX and AX130300Gloria HamiltonÎncă nu există evaluări
- SPAMEL EN Kaseta Suwnicowa PKS 8 W03Document1 paginăSPAMEL EN Kaseta Suwnicowa PKS 8 W03Erc Nunez VÎncă nu există evaluări
- Tsewg Tp-11 Ufc 3-500-10n Best PracticesDocument7 paginiTsewg Tp-11 Ufc 3-500-10n Best PracticeshopkitÎncă nu există evaluări
- JabscoPump 60080-0024Document5 paginiJabscoPump 60080-0024adavit73Încă nu există evaluări
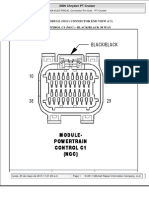
- CB-535B Vibratory Compactor Electrical System: Machine Harness Connector and Component LocationsDocument2 paginiCB-535B Vibratory Compactor Electrical System: Machine Harness Connector and Component Locationsvili40Încă nu există evaluări