S-ar putea să vă placă și
- Welding Capacity Analysis: Weld Is Adequate & Stress Ratio 0.86Document1 paginăWelding Capacity Analysis: Weld Is Adequate & Stress Ratio 0.86Engr Benalito A Catap IIIÎncă nu există evaluări
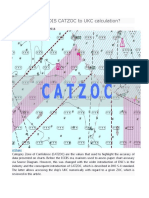
- How To Apply ECDIS CATZOC To UKC CalculationDocument9 paginiHow To Apply ECDIS CATZOC To UKC CalculationOrlando Quevedo100% (1)
- Unit 2 - Compass CorrectionDocument81 paginiUnit 2 - Compass CorrectionUtpal Kant100% (2)
- Lesson 11 - Compass Bearing and CorrectionDocument7 paginiLesson 11 - Compass Bearing and CorrectionREYNALD TEJERO0% (1)
- Beaufort Scale: Navigation SearchDocument6 paginiBeaufort Scale: Navigation SearchTom AlexÎncă nu există evaluări
- Ce November 2021 Refresher Pantino 4 Sec PDFDocument4 paginiCe November 2021 Refresher Pantino 4 Sec PDFYoshjordan LambÎncă nu există evaluări
- Indian Codes - Concrete Design PerDocument7 paginiIndian Codes - Concrete Design Peribrahim100% (1)
- IAMSARDocument13 paginiIAMSARatinder1375% (4)
- Ship's Log and Log DistanceDocument4 paginiShip's Log and Log DistanceGiorgi KandelakiÎncă nu există evaluări
- Shipborne Navigational Systems and EquipmentDocument10 paginiShipborne Navigational Systems and EquipmentAbdel Nasser Al-sheikh YousefÎncă nu există evaluări
- Bnwas 2Document22 paginiBnwas 2gopuÎncă nu există evaluări
- Document Akash PDFDocument4 paginiDocument Akash PDFAjit Tiwary100% (3)
- Steering Gear SystemsDocument23 paginiSteering Gear SystemsEzy WaqaÎncă nu există evaluări
- Phys 052.1 Activity 2 Free Fall - Projectile Motion - RemolanaDocument11 paginiPhys 052.1 Activity 2 Free Fall - Projectile Motion - RemolanaRodel RemolanaÎncă nu există evaluări
- Echo SounderDocument31 paginiEcho SounderKaruna LakhaniÎncă nu există evaluări
- MECH1230 Exam Paper v4 2013 2014 SolutionsDocument18 paginiMECH1230 Exam Paper v4 2013 2014 SolutionssebÎncă nu există evaluări
- ROBOTICS QUESTION BANK Unit I II III& IV BY MAHENDRABABU MEKALA, PBRVITS KAVALIDocument5 paginiROBOTICS QUESTION BANK Unit I II III& IV BY MAHENDRABABU MEKALA, PBRVITS KAVALIMahendra Babu Mekala61% (23)
- Open Channel Design Channels PDFDocument27 paginiOpen Channel Design Channels PDFSS100% (1)
- Echo Sounder: Submitted By: Marino BSMTDocument11 paginiEcho Sounder: Submitted By: Marino BSMTJhonny MarinoÎncă nu există evaluări
- Solas V Reg19Document7 paginiSolas V Reg19ahmedÎncă nu există evaluări
- NavigationDocument31 paginiNavigationjoshigauta75% (4)
- LOng RAnge Navigation - LORAN, (ClassDocument18 paginiLOng RAnge Navigation - LORAN, (ClassArif Munandar TriansyahÎncă nu există evaluări
- ECDIS Mandatory ECDIS Marine Equipment For Merchant Marine FURUNODocument11 paginiECDIS Mandatory ECDIS Marine Equipment For Merchant Marine FURUNOIhwan AsrulÎncă nu există evaluări
- Rotor BalancingDocument18 paginiRotor BalancingPrashant PuriÎncă nu există evaluări
- Engine MachineriesDocument18 paginiEngine MachineriesNabu NabuangÎncă nu există evaluări
- Ship Speed MeasurementDocument20 paginiShip Speed MeasurementHashil NaseerÎncă nu există evaluări
- Pre Departure Steering Gear ChecklistDocument1 paginăPre Departure Steering Gear ChecklistPranjyoti SaikiaÎncă nu există evaluări
- Furuno GP30-35 GPS Operators ManualDocument67 paginiFuruno GP30-35 GPS Operators Manualjsdoodnath100% (1)
- PG Magnetic CompassDocument50 paginiPG Magnetic CompassMaryusik Naum100% (1)
- M9 Experiment Lab ReportDocument5 paginiM9 Experiment Lab ReportShageenth Hashmeesh Sandrakumar100% (2)
- Tension Piles C Phi SoilDocument12 paginiTension Piles C Phi SoilAhmedKarimÎncă nu există evaluări
- DAY 10 Electronic Speed LogDocument51 paginiDAY 10 Electronic Speed LogSto Cu100% (4)
- Principles of GPS 4-13-04Document54 paginiPrinciples of GPS 4-13-04GenÎncă nu există evaluări
- 7 Ranging & PhasingDocument8 pagini7 Ranging & PhasingPraveen Kumar Rajarajacholan100% (1)
- Automatic Identification System Frequently Asked QuestionsDocument13 paginiAutomatic Identification System Frequently Asked QuestionsAnkur RanaÎncă nu există evaluări
- Ship Speed LogDocument32 paginiShip Speed Logcaptpkkhare100% (1)
- Weekly Test of Gmdss EquipmentDocument7 paginiWeekly Test of Gmdss EquipmentAnonymous XCHiKc5u100% (2)
- Design of Progressive Cavity Pump WellsDocument12 paginiDesign of Progressive Cavity Pump WellsIndra Bayu100% (2)
- Earth's Magnetsm and CompassesDocument38 paginiEarth's Magnetsm and CompassesHannah Duyag100% (3)
- Bridge Equipment - Autopliot: Description & Principle of OperationDocument4 paginiBridge Equipment - Autopliot: Description & Principle of Operationsathish kumarÎncă nu există evaluări
- Carriage RequirementsDocument63 paginiCarriage RequirementsFred GrosfilerÎncă nu există evaluări
- Steering Control SystemsDocument23 paginiSteering Control Systemsdonato del rosarioÎncă nu există evaluări
- Speed Log: Speed Through Water (STW) Speed Over Ground (SOG)Document20 paginiSpeed Log: Speed Through Water (STW) Speed Over Ground (SOG)bandar2Încă nu există evaluări
- MX Preaction Sprinkler Eng PDFDocument2 paginiMX Preaction Sprinkler Eng PDFNarendra Reddy Bhuma100% (1)
- Depth Sounder (Echo Sounder)Document2 paginiDepth Sounder (Echo Sounder)seaÎncă nu există evaluări
- Aneroid BarometerDocument23 paginiAneroid BarometerParminder singh parmarÎncă nu există evaluări
- Heat Engine: Name: Joezel A. Entienza Date:May 1, 2018 Lab 4Document11 paginiHeat Engine: Name: Joezel A. Entienza Date:May 1, 2018 Lab 4joshua jan allawanÎncă nu există evaluări
- Dead Reckoning and PilotingDocument2 paginiDead Reckoning and Pilotingal_dulayÎncă nu există evaluări
- TachometerDocument1 paginăTachometerJoshua GarciaÎncă nu există evaluări
- SOLAS V Reg 19Document5 paginiSOLAS V Reg 19ABDUL ALIMÎncă nu există evaluări
- Marine RadarDocument15 paginiMarine RadarMahami M Prosper100% (1)
- What Is Azipod Propulsion System On Ship Marine InsightDocument4 paginiWhat Is Azipod Propulsion System On Ship Marine InsightAffan KhalifÎncă nu există evaluări
- LoranDocument18 paginiLoranRostamedastanÎncă nu există evaluări
- AIS (Automatic Identification System) : PrincipleDocument6 paginiAIS (Automatic Identification System) : PrincipleKO KO MinÎncă nu există evaluări
- Long Range Identification and Tracking (LRIT)Document2 paginiLong Range Identification and Tracking (LRIT)Giorgi KandelakiÎncă nu există evaluări
- Lesson13-Master GyroDocument8 paginiLesson13-Master GyroREYNALD TEJEROÎncă nu există evaluări
- 04 Load Line Reissue PDFDocument4 pagini04 Load Line Reissue PDFNevzat AlkoçÎncă nu există evaluări
- Echo SounderDocument25 paginiEcho SounderAman JhaÎncă nu există evaluări
- (H) Compass Deviation by AzimuthDocument7 pagini(H) Compass Deviation by AzimuthBernard MamoraÎncă nu există evaluări
- DP Operator Manual: Practical Exercise No. 1Document11 paginiDP Operator Manual: Practical Exercise No. 1Kunal SinghÎncă nu există evaluări
- Magnetic CompassDocument36 paginiMagnetic CompassRajeewa Wickramahewage100% (1)
- CM650MAN Series2 3rdDocument59 paginiCM650MAN Series2 3rdRestoux LudovicÎncă nu există evaluări
- Electronic Navigational System MSN 332 Automatic Radar Plotting AidDocument18 paginiElectronic Navigational System MSN 332 Automatic Radar Plotting AidSafwan Al-zahraniÎncă nu există evaluări
- Format-of-Module (1) WK 1,2 SCSDocument17 paginiFormat-of-Module (1) WK 1,2 SCSRussell Sale100% (1)
- Imo Ps Ecdis MiscellaneousDocument3 paginiImo Ps Ecdis MiscellaneouscaptyashpalÎncă nu există evaluări
- Dead Reckoning PDFDocument6 paginiDead Reckoning PDFChiazor KevinÎncă nu există evaluări
- EPIRBDocument23 paginiEPIRBFloPÎncă nu există evaluări
- EM LogDocument3 paginiEM Logcaptyashpal100% (4)
- LRITDocument61 paginiLRITmouloud miloud100% (1)
- 1.IMO Performance Standards For Auto PilotsDocument4 pagini1.IMO Performance Standards For Auto PilotsNikhil C PanakÎncă nu există evaluări
- Charged Particle in A Magnetic FieldDocument4 paginiCharged Particle in A Magnetic FieldBenjaminMainÎncă nu există evaluări
- Engineering Properties of Biological Materials and Food Quality 3 (2+1)Document8 paginiEngineering Properties of Biological Materials and Food Quality 3 (2+1)Melanie Saldivar CapalunganÎncă nu există evaluări
- CFD (AE2402) Lesson PlanDocument2 paginiCFD (AE2402) Lesson Planaeroacademic100% (1)
- Torsion of Circular ShaftsDocument26 paginiTorsion of Circular ShaftsNaveen Kumar0% (1)
- Moments of ForceDocument4 paginiMoments of ForceCaseyÎncă nu există evaluări
- Session 1 2Document10 paginiSession 1 2Mix-Kat ZiakaÎncă nu există evaluări
- Geotech 2Document171 paginiGeotech 2nithinvlÎncă nu există evaluări
- Cambridge International AS & A Level: PHYSICS 9702/22Document16 paginiCambridge International AS & A Level: PHYSICS 9702/22NigelÎncă nu există evaluări
- Derivation of Planck's Radiation Law - Part 3Document8 paginiDerivation of Planck's Radiation Law - Part 3Kyle VerrisÎncă nu există evaluări
- Laminar or Viscous Flow 6Document26 paginiLaminar or Viscous Flow 6Sunil BagadeÎncă nu există evaluări
- Final Form 2 373Document12 paginiFinal Form 2 373Abood RainÎncă nu există evaluări
- Lecture3 PartBDocument61 paginiLecture3 PartBDiogo CecinÎncă nu există evaluări
- Susumu Yasuda - Prediction of LiquefactionDocument64 paginiSusumu Yasuda - Prediction of Liquefactiontedy suristiantoÎncă nu există evaluări
- Mechanical Characterisation of Very Thin Films: Physics of Advanced Materials Winter School 2008 1Document11 paginiMechanical Characterisation of Very Thin Films: Physics of Advanced Materials Winter School 2008 1Alekcandyr AlekcÎncă nu există evaluări
- ASME Design of Buoy For FRP Pipe TestingDocument5 paginiASME Design of Buoy For FRP Pipe TestingarkadjyothiprakashÎncă nu există evaluări
- Spectroscopy. A.R CoachingDocument8 paginiSpectroscopy. A.R Coachinggpandiyarajan007Încă nu există evaluări
- Using Monte Carlo Simulation For Solving Heat Conduction ProblemsDocument25 paginiUsing Monte Carlo Simulation For Solving Heat Conduction ProblemsjedusupÎncă nu există evaluări
- Exploring Gas Laws: Learning Goals: Once You Have Completed This Activity, You Should Understand The Concepts ofDocument5 paginiExploring Gas Laws: Learning Goals: Once You Have Completed This Activity, You Should Understand The Concepts ofAdam CrabbÎncă nu există evaluări
- ECE198L Questionaire SALEDocument120 paginiECE198L Questionaire SALEMiloÎncă nu există evaluări