S-ar putea să vă placă și
- Wave Mechanics and Wave Loads on Marine StructuresDe la EverandWave Mechanics and Wave Loads on Marine StructuresÎncă nu există evaluări
- 6 - Soil Data in Orcaflex-Y.T.kimDocument9 pagini6 - Soil Data in Orcaflex-Y.T.kimYoungtae KimÎncă nu există evaluări
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsDe la EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsÎncă nu există evaluări
- Combined Orcaflex ExampleDocument135 paginiCombined Orcaflex ExampleOkolo Obinna100% (1)
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityDe la EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityÎncă nu există evaluări
- OrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Document19 paginiOrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Abam Joshua100% (1)
- Mechanics of Offshore Pipelines, Volume 2: Buckle Propagation and ArrestDe la EverandMechanics of Offshore Pipelines, Volume 2: Buckle Propagation and ArrestÎncă nu există evaluări
- Catenary Cation of Cables PDFDocument153 paginiCatenary Cation of Cables PDFPrashanth Talkad Rajagopal100% (1)
- Subsea Rigid Pipelines – Methods of InstallationDe la EverandSubsea Rigid Pipelines – Methods of InstallationEvaluare: 5 din 5 stele5/5 (1)
- 0029 - ND Rev - 0 22-Jun-13 Guidelines For Submarine Pipeline InstallationDocument54 pagini0029 - ND Rev - 0 22-Jun-13 Guidelines For Submarine Pipeline InstallationGiray Çıvak100% (1)
- 14 - NRG - Pipe Installation - Davit LiftDocument16 pagini14 - NRG - Pipe Installation - Davit LiftBalanÎncă nu există evaluări
- Subsea Pipeline Design, Analysis, and InstallationDe la EverandSubsea Pipeline Design, Analysis, and InstallationEvaluare: 3 din 5 stele3/5 (1)
- Pipeline Instation Using Orcaflex Master Thesis 4 PDFDocument144 paginiPipeline Instation Using Orcaflex Master Thesis 4 PDFsamiransmita100% (3)
- Lazy AssignmentDocument5 paginiLazy Assignmentthefoot39Încă nu există evaluări
- Jacket Topside Transportation Sea Fastening InstallationDocument5 paginiJacket Topside Transportation Sea Fastening InstallationMermaid co100% (1)
- Bonga Pipe in Pipe LayDocument66 paginiBonga Pipe in Pipe LayWilliam O OkolotuÎncă nu există evaluări
- OrcaFlex Demonstration IIT MadrasDocument11 paginiOrcaFlex Demonstration IIT MadrasvigambetkarÎncă nu există evaluări
- Moses Mooring Analysis - Introduction - 230903 - 101634Document42 paginiMoses Mooring Analysis - Introduction - 230903 - 101634Hermawan Saini100% (1)
- Microsoft Word - PRELIMINARY MOORING ANALISYS DSV TS504Document48 paginiMicrosoft Word - PRELIMINARY MOORING ANALISYS DSV TS504halimÎncă nu există evaluări
- Design by AnsysDocument103 paginiDesign by AnsysHoang Tien DungÎncă nu există evaluări
- On Bottom StabilityDocument25 paginiOn Bottom StabilityhariharanoilgasÎncă nu există evaluări
- Flexible Riser (Abdul Rahman)Document5 paginiFlexible Riser (Abdul Rahman)Subsea_TeamÎncă nu există evaluări
- NTNU Thesis-Mooring DesignDocument105 paginiNTNU Thesis-Mooring DesignDing LiuÎncă nu există evaluări
- 23 Mooring Analysis During ShorepullDocument53 pagini23 Mooring Analysis During ShorepullNoverdo Saputra100% (1)
- Principia DeepLines PresentationDocument45 paginiPrincipia DeepLines Presentationbello imamÎncă nu există evaluări
- OrcaFlex ManualDocument429 paginiOrcaFlex Manualviknes07100% (1)
- 2 - Flexible Pipe InstallationDocument45 pagini2 - Flexible Pipe InstallationSeptian FirdausÎncă nu există evaluări
- Lifting Analysis Preview)Document4 paginiLifting Analysis Preview)Faisal AjaÎncă nu există evaluări
- EN8000 Aqwa Tutorial: Aqwa-Line Aqwa-Fer Aqwa-Librium Aqwa-Drift Aqwa-NautDocument13 paginiEN8000 Aqwa Tutorial: Aqwa-Line Aqwa-Fer Aqwa-Librium Aqwa-Drift Aqwa-NautDani GarciaÎncă nu există evaluări
- Offpipe Dynamic Analysis InstallationDocument25 paginiOffpipe Dynamic Analysis Installationbello imam100% (2)
- Nonlinear Wave Loads On Offshore StructuresDocument55 paginiNonlinear Wave Loads On Offshore Structureswendydy6Încă nu există evaluări
- Z-Subsea Free Span & VIVDocument2 paginiZ-Subsea Free Span & VIVxiaoÎncă nu există evaluări
- 109002-TSP-417 Specification For Landfall Construction and Pipeline Pull-InDocument41 pagini109002-TSP-417 Specification For Landfall Construction and Pipeline Pull-InMohd. Fadhil JamirinÎncă nu există evaluări
- Moses WorkbookDocument108 paginiMoses Workbookvivekt510100% (1)
- 1 - Side by Side Mooring AnalysisDocument11 pagini1 - Side by Side Mooring AnalysisYong KimÎncă nu există evaluări
- Thesis Manuscript - Airindy Felisita - 11Document232 paginiThesis Manuscript - Airindy Felisita - 11klop disposableÎncă nu există evaluări
- Wall Thickness Calculation of Offshore PipelinesDocument1 paginăWall Thickness Calculation of Offshore PipelinesAlvin SmithÎncă nu există evaluări
- Choi 2000 Free Spanning Analysis of Offshore PipelinesDocument14 paginiChoi 2000 Free Spanning Analysis of Offshore Pipelinesbello imamÎncă nu există evaluări
- FatFree User ManualDocument41 paginiFatFree User ManualLava Sat100% (1)
- Splash Zone Lifting Analysis of Subsea StructuresDocument11 paginiSplash Zone Lifting Analysis of Subsea StructuresAnonymous PibYPghÎncă nu există evaluări
- Orca FlexDocument9 paginiOrca FlexThis ManÎncă nu există evaluări
- Cable On Bottom Stability CommentsDocument12 paginiCable On Bottom Stability CommentsSourabhÎncă nu există evaluări
- Introduction FreeSpanningPipelinesDNV RP F105Document13 paginiIntroduction FreeSpanningPipelinesDNV RP F105Nabil37Încă nu există evaluări
- Offshore TechDocument351 paginiOffshore Techmarkengineer100% (2)
- Grillage Seafastening DesignExampleDocument66 paginiGrillage Seafastening DesignExampleeÎncă nu există evaluări
- Offshore Fixed Platform Design In-Place Analysis: Pbt750@mun - CaDocument60 paginiOffshore Fixed Platform Design In-Place Analysis: Pbt750@mun - CaJOSE LUIS GUTIERREZ GARCIAÎncă nu există evaluări
- Free Spanning Analysis of Offshore PipelinesDocument14 paginiFree Spanning Analysis of Offshore PipelinesMaringan JuliverÎncă nu există evaluări
- Concept Design of Mooring BuoyDocument54 paginiConcept Design of Mooring Buoyengineeringyusuf100% (1)
- Quayside Mooring Analysis - Floatel Triumph at Kemaman (P30049-MA-REV 0) (2095)Document35 paginiQuayside Mooring Analysis - Floatel Triumph at Kemaman (P30049-MA-REV 0) (2095)cliff1234Încă nu există evaluări
- White Paper: Computer Simulation of Buoy Mooring SystemsDocument12 paginiWhite Paper: Computer Simulation of Buoy Mooring Systemssmithwork100% (1)
- Offshore Load Out Day 3Document109 paginiOffshore Load Out Day 3bubbly_blu2Încă nu există evaluări
- OrcaFlex TutorialDocument491 paginiOrcaFlex Tutorialaipk11100% (1)
- Case Studies For Evaluating Hydrodynamic Motion Responses Using MOSESDocument26 paginiCase Studies For Evaluating Hydrodynamic Motion Responses Using MOSESATLURI SATYA SRINIVAS oe13m002Încă nu există evaluări
- Orca Flex 1Document376 paginiOrca Flex 1autienhaiÎncă nu există evaluări
- (2013.05.21) Loads On Offshore Structures Webinar: This Webinar Was Originally Presented On May 21st, 2013Document8 pagini(2013.05.21) Loads On Offshore Structures Webinar: This Webinar Was Originally Presented On May 21st, 2013Nabigh NabiylÎncă nu există evaluări
- Sea TransportationDocument8 paginiSea TransportationMark Samsel RohanÎncă nu există evaluări
- Puntos AbsorventesDocument22 paginiPuntos Absorventesarti999Încă nu există evaluări
- Elhanafi 2018Document15 paginiElhanafi 2018walacrÎncă nu există evaluări
- Mooring SystemsDocument10 paginiMooring SystemsGreace Yustisia CrystleÎncă nu există evaluări
- Fibretherm FT12Document47 paginiFibretherm FT12Dana Iulia Moraru50% (2)
- Java - Informatica Scenario Based Interview Questions (Convert Columns Into Rows)Document6 paginiJava - Informatica Scenario Based Interview Questions (Convert Columns Into Rows)Sri Kanth SriÎncă nu există evaluări
- AIX PowerHA (HACMP) CommandsDocument3 paginiAIX PowerHA (HACMP) CommandsdanilaixÎncă nu există evaluări
- Alexandria University Faculty of Engineering: Electromechanical Engineering Sheet 1 (Synchronous Machine)Document5 paginiAlexandria University Faculty of Engineering: Electromechanical Engineering Sheet 1 (Synchronous Machine)Mahmoud EltawabÎncă nu există evaluări
- A-VIP Compressor BrochureDocument6 paginiA-VIP Compressor BrochureHans Hans SadzÎncă nu există evaluări
- U-Joint Shaft PDFDocument5 paginiU-Joint Shaft PDFAdrian SantosÎncă nu există evaluări
- Profile of The Aerospace Industry in Greater MontrealDocument48 paginiProfile of The Aerospace Industry in Greater Montrealvigneshkumar rajanÎncă nu există evaluări
- Sea OcDocument296 paginiSea OcJunaid Shah100% (1)
- Infile StatementDocument21 paginiInfile StatementNagarjuna Parvatala100% (1)
- Power Network Telecommunication: Powerlink - Technical DataDocument10 paginiPower Network Telecommunication: Powerlink - Technical Datawas00266Încă nu există evaluări
- 7sd610 CatalogueDocument35 pagini7sd610 CatalogueTntngn Petualang100% (1)
- Lighting Lighting: Smartbright Direct Panel G2Document2 paginiLighting Lighting: Smartbright Direct Panel G2Devin Yhojan Viafara MancillaÎncă nu există evaluări
- David Beard Composer CV ShortDocument2 paginiDavid Beard Composer CV ShortEhsan KarimyÎncă nu există evaluări
- Microsoft ISA Server 2006 - Certificate Troubleshooting - Part IIDocument7 paginiMicrosoft ISA Server 2006 - Certificate Troubleshooting - Part IIKhodor AkoumÎncă nu există evaluări
- مثال تطبيقي في النمذجة والمحاكاة باستخدام CSIMDocument11 paginiمثال تطبيقي في النمذجة والمحاكاة باستخدام CSIMأكبر مكتبة كتب عربيةÎncă nu există evaluări
- Diagnostic Exam Review Phy10Document24 paginiDiagnostic Exam Review Phy10Kayla DollenteÎncă nu există evaluări
- Video Games Industry FinalDocument44 paginiVideo Games Industry FinalZee100% (4)
- UntitledDocument32 paginiUntitledAnimeFreak930901Încă nu există evaluări
- Why Rife Was Right and Hoyland Was Wrong and What To Do About ItDocument4 paginiWhy Rife Was Right and Hoyland Was Wrong and What To Do About ItHayley As Allegedly-Called Yendell100% (1)
- Diamond 53 BrochureDocument3 paginiDiamond 53 Brochuregipanaul100% (1)
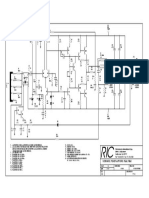
- Ric RG90 y RG60Document1 paginăRic RG90 y RG60GabrielConsentidoÎncă nu există evaluări
- Unit Ii Construction Practice - 10Document94 paginiUnit Ii Construction Practice - 10Arun KumarÎncă nu există evaluări
- Intel Artificial Intelligence EguideDocument15 paginiIntel Artificial Intelligence Eguidenikhil_805Încă nu există evaluări
- 20 Advanced Processor DesignsDocument28 pagini20 Advanced Processor DesignsHaileab YohannesÎncă nu există evaluări
- IET Membership Guidance NotesDocument4 paginiIET Membership Guidance NotesKingsley InbasinghÎncă nu există evaluări
- InternshipDocument14 paginiInternshipMohammed Shaheeruddin0% (1)
- High Performance HTP eDocument14 paginiHigh Performance HTP ejohnny_cashedÎncă nu există evaluări
- A Neural Network Model For Electric PDFDocument6 paginiA Neural Network Model For Electric PDFR Adhitya ArÎncă nu există evaluări
- 20 and 21. Requirements For Licensure by Examination Nclex. Revised 06.20.19 1Document2 pagini20 and 21. Requirements For Licensure by Examination Nclex. Revised 06.20.19 1Glennah Marie Avenido RamosÎncă nu există evaluări
- HTTP Download - Yamaha.com API Asset File Language En&site Au - YamahaDocument5 paginiHTTP Download - Yamaha.com API Asset File Language En&site Au - Yamahaericwc123456Încă nu există evaluări