S-ar putea să vă placă și
- Speed Control of 3 Phase Induction MotorDocument10 paginiSpeed Control of 3 Phase Induction MotorK.R.RaguramÎncă nu există evaluări
- Industrial Automation - ppt12Document23 paginiIndustrial Automation - ppt12Peeyush Pankaj BhardeeyaÎncă nu există evaluări
- What Is A PLC PresentationDocument24 paginiWhat Is A PLC PresentationrapelinaresÎncă nu există evaluări
- PLC To VFD Communication ExamplesDocument9 paginiPLC To VFD Communication Examplesghan100% (4)
- 01 - Background To SCADADocument44 pagini01 - Background To SCADADwindawan Holandrio100% (1)
- Introduction To Robotics - MidtermDocument9 paginiIntroduction To Robotics - Midtermumar khanÎncă nu există evaluări
- Electrical Wiring DigramDocument15 paginiElectrical Wiring DigramSunilMurkikarÎncă nu există evaluări
- In The Name of Allah The Most Benificet and The Most MercifulDocument24 paginiIn The Name of Allah The Most Benificet and The Most MercifulAsad RazaÎncă nu există evaluări
- PLC Ans Scada ProjectDocument31 paginiPLC Ans Scada ProjectMaya Mayaa100% (1)
- Siemens S7 PLC ConnectionDocument15 paginiSiemens S7 PLC ConnectionkiciorÎncă nu există evaluări
- Omron PLC & Remote Io - Cat2014Document40 paginiOmron PLC & Remote Io - Cat2014Awidhi KresnawanÎncă nu există evaluări
- AC DrivesDocument120 paginiAC DrivesVenkata GanesanÎncă nu există evaluări
- PLC ExerciseDocument19 paginiPLC ExercisemahderÎncă nu există evaluări
- Hardware Manual - Rel 2 - 20Document954 paginiHardware Manual - Rel 2 - 20pichoooo100% (1)
- Automation Using PLCDocument32 paginiAutomation Using PLCRamashish KumarÎncă nu există evaluări
- PLC Interview QuestionsDocument2 paginiPLC Interview QuestionsSushant100% (1)
- Presentation On PLCDocument27 paginiPresentation On PLCTyrone Michaels100% (1)
- Chopper DriveDocument66 paginiChopper Drivemazza23450% (2)
- Sinamics g120c Training Booklet enDocument76 paginiSinamics g120c Training Booklet enValentina RocaÎncă nu există evaluări
- JS iG5A Manual English Frequency Converter Inverter VFD SDocument109 paginiJS iG5A Manual English Frequency Converter Inverter VFD SPhi TrầnÎncă nu există evaluări
- 1 - P L C - GeneralDocument37 pagini1 - P L C - GeneralMystic AamirÎncă nu există evaluări
- PLC Operated Cutting MachineDocument9 paginiPLC Operated Cutting MachineIJRASETPublicationsÎncă nu există evaluări
- ELE-2613 Industrial Automation LabManualDocument55 paginiELE-2613 Industrial Automation LabManualSara Alnuaimi100% (1)
- PLC Training KitDocument67 paginiPLC Training KitGyanPrakashÎncă nu există evaluări
- s7 200 SMART PLC CatalogueDocument36 paginis7 200 SMART PLC CataloguemukeshÎncă nu există evaluări
- Stepper Motor Control Using 8051Document7 paginiStepper Motor Control Using 8051hksaifee100% (1)
- PLC Presentation NewDocument27 paginiPLC Presentation Newgautamjoshi83% (6)
- PLC Application Exercise - LDDocument33 paginiPLC Application Exercise - LDMazarel AurelÎncă nu există evaluări
- MASTER-K Series: Leader in Electrics & AutomationDocument66 paginiMASTER-K Series: Leader in Electrics & AutomationParesh Chandra DebnathÎncă nu există evaluări
- Portable PLC Troubleshooting Training - Siemens S71200 Ebook CurriculumDocument3 paginiPortable PLC Troubleshooting Training - Siemens S71200 Ebook CurriculumMd. ArifÎncă nu există evaluări
- Input - Output Devices Used With PLCDocument23 paginiInput - Output Devices Used With PLCmoney_kandan2004Încă nu există evaluări
- PLC Based Automatic Cutting MachineDocument8 paginiPLC Based Automatic Cutting MachineInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Ac Servo Motor Principal PDFDocument26 paginiAc Servo Motor Principal PDFAman Deep86% (7)
- SUNFAR E300 Inverter PDFDocument42 paginiSUNFAR E300 Inverter PDFSenad Gluhačević50% (2)
- Basic Programming Simatic S7-300Document40 paginiBasic Programming Simatic S7-300Mst ThangarajuÎncă nu există evaluări
- Whirlpool FL 242Document11 paginiWhirlpool FL 242Claudio Luciano KupfersteinÎncă nu există evaluări
- Washing Machine Control Using 8051 MicrocontrollerDocument4 paginiWashing Machine Control Using 8051 MicrocontrollerPrasath MurugesanÎncă nu există evaluări
- P810 For Windows - Manual PDFDocument133 paginiP810 For Windows - Manual PDFSiding BarroÎncă nu există evaluări
- PLC - L1Document25 paginiPLC - L1MASOUDÎncă nu există evaluări
- MEEN461 - FA17 - LAB01 - Intro To PLCs and LogixProDocument10 paginiMEEN461 - FA17 - LAB01 - Intro To PLCs and LogixProAngel Exposito100% (1)
- Additional Manual Siemen S7-200 PDFDocument39 paginiAdditional Manual Siemen S7-200 PDFJoko Suwito UtomoÎncă nu există evaluări
- Sequential Motion ControlDocument608 paginiSequential Motion Controltomjordan12321Încă nu există evaluări
- Servo Motor - Servo Mechanism - Theory and Working PrincipleDocument6 paginiServo Motor - Servo Mechanism - Theory and Working PrincipleBrahmanand SinghÎncă nu există evaluări
- Basic Programming Simatic S7-300Document41 paginiBasic Programming Simatic S7-300Nisar Ahmed100% (1)
- Resolver (Electrical) - ..Document3 paginiResolver (Electrical) - ..irmadhikaraÎncă nu există evaluări
- Siemens S7-200 Communication SettingsDocument14 paginiSiemens S7-200 Communication Settingswww.otomasyonegitimi.comÎncă nu există evaluări
- Motion Control ReportDe la EverandMotion Control ReportEvaluare: 4 din 5 stele4/5 (1)
- PLC Training Manual - ChinaDocument62 paginiPLC Training Manual - ChinaArsonval Fleury100% (1)
- Programmable Logic Control Trainer IT-1200SDocument34 paginiProgrammable Logic Control Trainer IT-1200SImran ShaukatÎncă nu există evaluări
- DC Motor Speed Control Using Pulse Width Modulation (PWM)Document30 paginiDC Motor Speed Control Using Pulse Width Modulation (PWM)अमरेश झाÎncă nu există evaluări
- Siemens s7-300 ProgrammingDocument94 paginiSiemens s7-300 ProgrammingPrittam Kumar Jena100% (6)
- Lab2 MotorControl 08Document18 paginiLab2 MotorControl 08ĐạiDương100% (1)
- Presentation 2 (PLC)Document42 paginiPresentation 2 (PLC)Amit SinghÎncă nu există evaluări
- S7-300 PLC in RTGDocument72 paginiS7-300 PLC in RTGmunawar munawarÎncă nu există evaluări
- Introducing The S7-200Document4 paginiIntroducing The S7-200wcreative370Încă nu există evaluări
- Performing Installation and Programming of Programmable Logic Controller (PLC) SystemDocument33 paginiPerforming Installation and Programming of Programmable Logic Controller (PLC) SystemMohammed AwolÎncă nu există evaluări
- Training Dept (Eee) V Sem E-PlanDocument33 paginiTraining Dept (Eee) V Sem E-PlanS.Dharanipathy100% (5)
- Psgii - RMD Bill of Materials List 10 HP SUBMERSIBLE MOTOR 6 (9800060100)Document3 paginiPsgii - RMD Bill of Materials List 10 HP SUBMERSIBLE MOTOR 6 (9800060100)S.DharanipathyÎncă nu există evaluări
- Design Rules: A. Gunasundari Asst - Professor Eee Dept, PSGCTDocument35 paginiDesign Rules: A. Gunasundari Asst - Professor Eee Dept, PSGCTS.DharanipathyÎncă nu există evaluări
- FB23 2Document2 paginiFB23 2S.DharanipathyÎncă nu există evaluări
- Multirate Digital Signal ProcessingDocument64 paginiMultirate Digital Signal ProcessingS.DharanipathyÎncă nu există evaluări
- Experiment Using Capture CMOS & NMOSDocument14 paginiExperiment Using Capture CMOS & NMOSS.DharanipathyÎncă nu există evaluări
- pR6-40-10-4 HPDocument2 paginipR6-40-10-4 HPS.DharanipathyÎncă nu există evaluări
- Speed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM)Document7 paginiSpeed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM)S.Dharanipathy100% (1)
- Stampings 1Document1 paginăStampings 1S.DharanipathyÎncă nu există evaluări
- pR6 40 8 3HPDocument2 paginipR6 40 8 3HPS.DharanipathyÎncă nu există evaluări
- Wires and Cables1Document7 paginiWires and Cables1S.DharanipathyÎncă nu există evaluări
- Pneumatic Actuators: For Power, Motion and ControlDocument162 paginiPneumatic Actuators: For Power, Motion and ControlS.Dharanipathy100% (5)
- Insulation Resistance TestDocument5 paginiInsulation Resistance TestS.DharanipathyÎncă nu există evaluări
- Broaching Machines-Broach Making Broaching OperationsDocument48 paginiBroaching Machines-Broach Making Broaching OperationsS.DharanipathyÎncă nu există evaluări
- Design of Polyphase Generators and MotorsDocument284 paginiDesign of Polyphase Generators and MotorsMartin J.50% (2)
- Blanking Piercing Forming DrawingDocument3 paginiBlanking Piercing Forming DrawingS.DharanipathyÎncă nu există evaluări
- Measurement of Stator Resistance TestDocument4 paginiMeasurement of Stator Resistance TestS.DharanipathyÎncă nu există evaluări
- Macro " B " Programming: Makino Asia Pte LTD Application DepartmentDocument71 paginiMacro " B " Programming: Makino Asia Pte LTD Application DepartmentS.Dharanipathy85% (13)
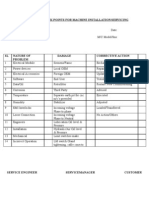
- Electrical Check Points For Machine InstallationDocument1 paginăElectrical Check Points For Machine InstallationS.DharanipathyÎncă nu există evaluări
- Installation and Start-Up Guide 11/2002 Edition: Ccu3 Software Version 6 Sinumerik 810DDocument350 paginiInstallation and Start-Up Guide 11/2002 Edition: Ccu3 Software Version 6 Sinumerik 810DS.Dharanipathy100% (5)
- Variable Lead Thread Cutting Initialization Flow For FS-0iDocument20 paginiVariable Lead Thread Cutting Initialization Flow For FS-0iS.DharanipathyÎncă nu există evaluări
- Variable Lead Thread Cutting Initialization Flow For FS-0iDocument20 paginiVariable Lead Thread Cutting Initialization Flow For FS-0iS.DharanipathyÎncă nu există evaluări
- Siemens Parameter ListDocument4 paginiSiemens Parameter ListS.DharanipathyÎncă nu există evaluări
- Level 1Document1 paginăLevel 1S.DharanipathyÎncă nu există evaluări
- Siemens 802D With 5.5Kw Spindle Motor: Description Make Specification QTY Rate SL.N O Landing PriceDocument27 paginiSiemens 802D With 5.5Kw Spindle Motor: Description Make Specification QTY Rate SL.N O Landing PriceS.DharanipathyÎncă nu există evaluări
- Acer N300 ManualDocument50 paginiAcer N300 Manualc_formatÎncă nu există evaluări
- Assessment of The Genitourinary System: GeneralDocument2 paginiAssessment of The Genitourinary System: GeneralMaharani UtamiÎncă nu există evaluări
- Apexi Powerfc Instruction ManualDocument15 paginiApexi Powerfc Instruction ManualEminence Imports0% (2)
- QSP 04bDocument35 paginiQSP 04bakrastogi94843Încă nu există evaluări
- 50114a Isolemfi 50114a MonoDocument2 pagini50114a Isolemfi 50114a MonoUsama AwadÎncă nu există evaluări
- Comparison Between CompetitorsDocument2 paginiComparison Between Competitorsritesh singhÎncă nu există evaluări
- Aleutia Solar Container ClassroomDocument67 paginiAleutia Solar Container ClassroomaleutiaÎncă nu există evaluări
- Department of Education: Republic of The PhilippinesDocument1 paginăDepartment of Education: Republic of The PhilippinesJonathan CayatÎncă nu există evaluări
- Physics Education Thesis TopicsDocument4 paginiPhysics Education Thesis TopicsPaperWriterServicesCanada100% (2)
- Rana2 Compliment As Social StrategyDocument12 paginiRana2 Compliment As Social StrategyRanaÎncă nu există evaluări
- Brand Strategy - in B2BDocument6 paginiBrand Strategy - in B2BKrishan SahuÎncă nu există evaluări
- ISO 27001 Introduction Course (05 IT01)Document56 paginiISO 27001 Introduction Course (05 IT01)Sheik MohaideenÎncă nu există evaluări
- Sources of Hindu LawDocument9 paginiSources of Hindu LawKrishnaKousikiÎncă nu există evaluări
- 2014 - A - Levels Actual Grade A Essay by Harvey LeeDocument3 pagini2014 - A - Levels Actual Grade A Essay by Harvey Leecherylhzy100% (1)
- Eggermont 2019 ABRDocument15 paginiEggermont 2019 ABRSujeet PathakÎncă nu există evaluări
- Training For Humans Guide: FAQ's How Many Sets/reps Should I Do Per Exercise?Document28 paginiTraining For Humans Guide: FAQ's How Many Sets/reps Should I Do Per Exercise?Paulo Pires100% (1)
- Progressive Muscle RelaxationDocument4 paginiProgressive Muscle RelaxationEstéphany Rodrigues ZanonatoÎncă nu există evaluări
- Toeic: Check Your English Vocabulary ForDocument41 paginiToeic: Check Your English Vocabulary ForEva Ibáñez RamosÎncă nu există evaluări
- Phytotherapy On CancerDocument21 paginiPhytotherapy On CancerSiddhendu Bhattacharjee100% (1)
- Oxford EAP B1 Pre-Intermediate Student - S Book 2Document167 paginiOxford EAP B1 Pre-Intermediate Student - S Book 2Thư Dương Thị AnhÎncă nu există evaluări
- Sem4 Complete FileDocument42 paginiSem4 Complete Fileghufra baqiÎncă nu există evaluări
- SSP 237 d1Document32 paginiSSP 237 d1leullÎncă nu există evaluări
- Drug Addiction Final (Term Paper)Document15 paginiDrug Addiction Final (Term Paper)Dessa Patiga IIÎncă nu există evaluări
- Webinar Gizi - Patho StuntingDocument16 paginiWebinar Gizi - Patho StuntingMiftahul HikmahÎncă nu există evaluări
- MultiLoadII Mobile Quick Start PDFDocument10 paginiMultiLoadII Mobile Quick Start PDFAndrés ColmenaresÎncă nu există evaluări
- ChatGpt PDFDocument19 paginiChatGpt PDFsanx2014100% (1)
- 01 托福基础课程Document57 pagini01 托福基础课程ZhaoÎncă nu există evaluări
- A Survey On Security and Privacy Issues of Bitcoin-1Document39 paginiA Survey On Security and Privacy Issues of Bitcoin-1Ramineni HarshaÎncă nu există evaluări
- Journal of Biology EducationDocument13 paginiJournal of Biology EducationFarah ArrumyÎncă nu există evaluări
- SASS Prelims 2017 4E5N ADocument9 paginiSASS Prelims 2017 4E5N ADamien SeowÎncă nu există evaluări