S-ar putea să vă placă și
- Prelim Yearly Kiss NotesDocument83 paginiPrelim Yearly Kiss NotesPercy Jack100% (1)
- Introduction to the simulation of power plants for EBSILON®Professional Version 15De la EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15Încă nu există evaluări
- Introduction to STAAD Pro AnalysisDocument24 paginiIntroduction to STAAD Pro Analysisammigalla swethaÎncă nu există evaluări
- SolidWorks 2015 Learn by doing-Part 3 (DimXpert and Rendering)De la EverandSolidWorks 2015 Learn by doing-Part 3 (DimXpert and Rendering)Evaluare: 4.5 din 5 stele4.5/5 (5)
- Solidworks 2018 Learn by Doing - Part 3: DimXpert and RenderingDe la EverandSolidworks 2018 Learn by Doing - Part 3: DimXpert and RenderingÎncă nu există evaluări
- SPC Manual PDFDocument11 paginiSPC Manual PDFNgiuyen Viet TienÎncă nu există evaluări
- Leaning Tower of PisaDocument7 paginiLeaning Tower of PisaAlfredo FranquezÎncă nu există evaluări
- The Beam V1.0Document20 paginiThe Beam V1.0Prashant GargÎncă nu există evaluări
- Refrigerator Priciples and WorkingDocument16 paginiRefrigerator Priciples and WorkingSanthan SalaiÎncă nu există evaluări
- AutoCAD Civil 3D - Roads Design: 2De la EverandAutoCAD Civil 3D - Roads Design: 2Evaluare: 3.5 din 5 stele3.5/5 (2)
- SAP2000 Tutorial by GoelDocument21 paginiSAP2000 Tutorial by GoelhedyÎncă nu există evaluări
- SolidWorks 2016 Learn by doing 2016 - Part 3De la EverandSolidWorks 2016 Learn by doing 2016 - Part 3Evaluare: 3.5 din 5 stele3.5/5 (3)
- PH102 LabDocument10 paginiPH102 LabPeggy CockerÎncă nu există evaluări
- Statement of Purpose or Motivation LetterDocument2 paginiStatement of Purpose or Motivation LettersalequeÎncă nu există evaluări
- AEDsys User GuideDocument34 paginiAEDsys User GuideJoaquinBarreto0% (1)
- Tutorial For Risa Educational: C.M. Uang and K.M. LeetDocument18 paginiTutorial For Risa Educational: C.M. Uang and K.M. LeetfabianoramiroÎncă nu există evaluări
- RISA 2D Truss AnalysisDocument161 paginiRISA 2D Truss AnalysisIam engineerÎncă nu există evaluări
- RISA 2D TutorialDocument19 paginiRISA 2D TutorialAlejandroÎncă nu există evaluări
- NS12-3mult FrameDocument8 paginiNS12-3mult FrameSudarshan MadeswaranÎncă nu există evaluări
- MET 306 Activity 8a Mechanism Design Wildfire 5.0 Level 7Document10 paginiMET 306 Activity 8a Mechanism Design Wildfire 5.0 Level 7arulvasanth_30011980Încă nu există evaluări
- Examp 03 Staad Pro 2002 FrameDocument113 paginiExamp 03 Staad Pro 2002 FrameZamany HasanÎncă nu există evaluări
- Statics Analysis Using Visual AnalysisDocument8 paginiStatics Analysis Using Visual AnalysiscaraÎncă nu există evaluări
- SAP2000 Demo 2013 PDFDocument24 paginiSAP2000 Demo 2013 PDFLi Yin Ting TerryÎncă nu există evaluări
- 2D Frame Analysis Program for Dissertation ProjectDocument5 pagini2D Frame Analysis Program for Dissertation ProjectAmy ZanÎncă nu există evaluări
- Aedsys Program: 2002 - Jack D Mattingly, PH.DDocument34 paginiAedsys Program: 2002 - Jack D Mattingly, PH.Dİlker ÇirkinÎncă nu există evaluări
- ME 266 SOLID MECHANICS LAB VIRTUAL TENSILE TESTDocument9 paginiME 266 SOLID MECHANICS LAB VIRTUAL TENSILE TESTDeva RajÎncă nu există evaluări
- Prok On For Truss NoteDocument6 paginiProk On For Truss NoteIsuru Udayanga NanayakkaraÎncă nu există evaluări
- (TECH) Analyzing Trusses With Sap2000Document17 pagini(TECH) Analyzing Trusses With Sap2000Nica TimeeaÎncă nu există evaluări
- Staad Pro TutorialDocument22 paginiStaad Pro Tutorialarno assassinÎncă nu există evaluări
- Tutorial On Assembly and Solidworks Motion: ObjectiveDocument7 paginiTutorial On Assembly and Solidworks Motion: ObjectiveD_D_76Încă nu există evaluări
- Lin Pro HelpDocument8 paginiLin Pro HelpjoeÎncă nu există evaluări
- Ansys Lab1 PDFDocument15 paginiAnsys Lab1 PDFVenkata DineshÎncă nu există evaluări
- User Interface: Post ProcessingDocument5 paginiUser Interface: Post ProcessingAnonymous f068hbÎncă nu există evaluări
- Excel Add-In For Statistical Process ControlDocument12 paginiExcel Add-In For Statistical Process Controlmy.nafi.pmp5283Încă nu există evaluări
- ME 220 Project User ManualDocument8 paginiME 220 Project User ManualJohn ChoÎncă nu există evaluări
- Tutorial No1Document4 paginiTutorial No1Lucas MachadoÎncă nu există evaluări
- Staad ProDocument16 paginiStaad Promohit vermaÎncă nu există evaluări
- Manual LSPSDocument101 paginiManual LSPSEnrique León SalvaÎncă nu există evaluări
- Risa Tutorial WordDocument9 paginiRisa Tutorial WordWilder Muñoz RiveraÎncă nu există evaluări
- Computer Application in Civil EngineeringDocument21 paginiComputer Application in Civil EngineeringSangeetha AnguchamyÎncă nu există evaluări
- AEDsys 1Document10 paginiAEDsys 1Mikael Bezerra Cotias Dos SantosÎncă nu există evaluări
- Sap Truess Step by Step ProceduresDocument18 paginiSap Truess Step by Step ProceduresThulasirajan KrishnanÎncă nu există evaluări
- Tutorial On SAP2000Document21 paginiTutorial On SAP2000Xet FatÎncă nu există evaluări
- Using Equations in Solidworks, Example 2: Figure 1 One Instance of A Parametric PartDocument9 paginiUsing Equations in Solidworks, Example 2: Figure 1 One Instance of A Parametric Partjhonja751Încă nu există evaluări
- FRAC W01 ThreePointDocument11 paginiFRAC W01 ThreePointavenashaÎncă nu există evaluări
- SAP 2000 Truss Analysis TutorialDocument28 paginiSAP 2000 Truss Analysis TutorialPoh Yih ChernÎncă nu există evaluări
- Getting Started With ADSDocument17 paginiGetting Started With ADSbayman66Încă nu există evaluări
- Import and analyze data in Origin 8.6Document11 paginiImport and analyze data in Origin 8.6Lakis TriantafillouÎncă nu există evaluări
- A Freeware-Based Antenna Simulation Exercise: L. Brent JenkinsDocument8 paginiA Freeware-Based Antenna Simulation Exercise: L. Brent JenkinsnoubernouÎncă nu există evaluări
- TutorialFD - Concrete FootingsDocument17 paginiTutorialFD - Concrete FootingsFranz Miguel Claros VargasÎncă nu există evaluări
- Finite Element Method Using Pro/Engineer and Ansys: Step 1. Make The PartDocument7 paginiFinite Element Method Using Pro/Engineer and Ansys: Step 1. Make The PartRithesh Baliga BÎncă nu există evaluări
- Staad Pro Tutorial Part4Document50 paginiStaad Pro Tutorial Part4mech_nedian9714100% (1)
- 4Cast XL User Guide: Time-Series Prediction in 5 StepsDocument31 pagini4Cast XL User Guide: Time-Series Prediction in 5 StepsAbhinav JainÎncă nu există evaluări
- Users Guide v1Document21 paginiUsers Guide v1Joanne Ash MajdaÎncă nu există evaluări
- Alphaview User GuideDocument10 paginiAlphaview User GuideMichael CaverlyÎncă nu există evaluări
- Exercise 2: Creating Power System Elements: Chapter DDocument14 paginiExercise 2: Creating Power System Elements: Chapter DgjanitoÎncă nu există evaluări
- Show Forces Stresses ShellsDocument3 paginiShow Forces Stresses ShellsRavi Sharma BhandariÎncă nu există evaluări
- Finite Element Analysis of a Strap PlateDocument18 paginiFinite Element Analysis of a Strap PlateGp Cheng100% (1)
- Simulations of Dipole Antenns Using HFSS: January 2004Document32 paginiSimulations of Dipole Antenns Using HFSS: January 2004Cristina DespinaÎncă nu există evaluări
- Tut3 Web OpeningDocument29 paginiTut3 Web OpeningDario Manrique GamarraÎncă nu există evaluări
- Department of Civil and Combat Engineering D.E.C DebrezietDocument18 paginiDepartment of Civil and Combat Engineering D.E.C DebrezietHaftom GebreegziabiherÎncă nu există evaluări
- Lab 03 - Data Formats - Contrast Stretching - Density SlicingDocument11 paginiLab 03 - Data Formats - Contrast Stretching - Density SlicingANN SHALITAÎncă nu există evaluări
- NX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)De la EverandNX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)Încă nu există evaluări
- ACI Committee 408, Bond Under Cyclic LoadsDocument5 paginiACI Committee 408, Bond Under Cyclic LoadsAlfredo FranquezÎncă nu există evaluări
- Hardy CrossDocument42 paginiHardy CrossAlfredo FranquezÎncă nu există evaluări
- RISA Educational Tutorial for Truss and Frame AnalysisDocument18 paginiRISA Educational Tutorial for Truss and Frame AnalysisAlfredo FranquezÎncă nu există evaluări
- RISA Educational Tutorial for Truss and Frame AnalysisDocument18 paginiRISA Educational Tutorial for Truss and Frame AnalysisAlfredo FranquezÎncă nu există evaluări
- Brain Tumor Classification Using Resnet-101 Based Squeeze and Excitation Deep Neural NetworkDocument7 paginiBrain Tumor Classification Using Resnet-101 Based Squeeze and Excitation Deep Neural Networkthouraya hadj hassenÎncă nu există evaluări
- Nacon GC 200wlDocument30 paginiNacon GC 200wlzo andriamiarintsoaÎncă nu există evaluări
- CES 156-2015 ES-1996 Design of Masonry Structures - Part 1-1Document129 paginiCES 156-2015 ES-1996 Design of Masonry Structures - Part 1-1China AlemayehouÎncă nu există evaluări
- Grade 7 Quarter 4 Unit Test 1Document2 paginiGrade 7 Quarter 4 Unit Test 1Vener ManlapatÎncă nu există evaluări
- CAT of MAT1142 Y 2023 Marking GuideDocument7 paginiCAT of MAT1142 Y 2023 Marking Guidehasa samÎncă nu există evaluări
- BerlitzDocument10 paginiBerlitzFrancis John Jaro BulaongÎncă nu există evaluări
- Self Evaluation Rubric ShadowingDocument1 paginăSelf Evaluation Rubric ShadowingJoaquín LaraÎncă nu există evaluări
- Branching Stochastic Processes History, Theory, Applications - Mitov 2011Document9 paginiBranching Stochastic Processes History, Theory, Applications - Mitov 2011Manelisi LuthuliÎncă nu există evaluări
- IC8451-2M - by WWW - EasyEngineering.net 1 PDFDocument12 paginiIC8451-2M - by WWW - EasyEngineering.net 1 PDFSuryaÎncă nu există evaluări
- CLASS 9 HOLIDAY HOMEWORK GUIDEDocument3 paginiCLASS 9 HOLIDAY HOMEWORK GUIDEAyush MauryaÎncă nu există evaluări
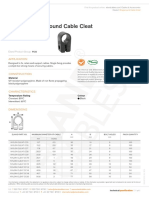
- Wraparound Cable CleatDocument1 paginăWraparound Cable Cleatsaghaee.rezaÎncă nu există evaluări
- 1-+Situation+of+Mechanized+Tunnelling+in+Chile AlexandreGomes CTESDocument34 pagini1-+Situation+of+Mechanized+Tunnelling+in+Chile AlexandreGomes CTESMaria Javiera Caballero SalazarÎncă nu există evaluări
- Stripline 41 HoDocument2 paginiStripline 41 Howaheed babarÎncă nu există evaluări
- UltimateDocument34 paginiUltimateTaren JamirÎncă nu există evaluări
- API 682 Accumulator Data SheetDocument1 paginăAPI 682 Accumulator Data SheetBhyrappaÎncă nu există evaluări
- Grade 11 Informal Writing Booklet 2 NEWDocument11 paginiGrade 11 Informal Writing Booklet 2 NEWMaria-Regina UkatuÎncă nu există evaluări
- WKS 5 Cutting and Welding Drums and TanksDocument3 paginiWKS 5 Cutting and Welding Drums and TanksKishor KoshyÎncă nu există evaluări
- Checkpoint April 2016 Mathematics Paper 2Document16 paginiCheckpoint April 2016 Mathematics Paper 2Aditya Senthil100% (1)
- Asbestos Abatement Design ManualDocument33 paginiAsbestos Abatement Design Manualchaib meriemÎncă nu există evaluări
- Special Consideration - Exam Day - Form 7Document2 paginiSpecial Consideration - Exam Day - Form 7Nivel Secundario BMDSÎncă nu există evaluări
- There Is No A.I. - The New YorkerDocument8 paginiThere Is No A.I. - The New YorkerNoam NorkhatÎncă nu există evaluări
- Week#4-Measure of DispersionDocument52 paginiWeek#4-Measure of DispersionWHO Cox's BazarÎncă nu există evaluări
- Nathaniel Lichfield - Community Impact Evaluation - Principles and Practice-Routledge (1996)Document342 paginiNathaniel Lichfield - Community Impact Evaluation - Principles and Practice-Routledge (1996)Michael González VásquezÎncă nu există evaluări
- Latin Extended-C: Range: 2C60-2C7FDocument3 paginiLatin Extended-C: Range: 2C60-2C7FJhie EhefÎncă nu există evaluări
- Bernoulli's EquationDocument13 paginiBernoulli's EquationAbdul Azeez Ismaila ShuaibuÎncă nu există evaluări
- Line Out Building SettingDocument1 paginăLine Out Building SettingvkÎncă nu există evaluări