S-ar putea să vă placă și
- 64QAMDocument631 pagini64QAMAkhmad SayutiÎncă nu există evaluări
- Communication Lab Manual EL394 PDFDocument26 paginiCommunication Lab Manual EL394 PDFKhan Shahrukh AshrafÎncă nu există evaluări
- Cryptography, Winter Term 16/17: Sample Solution To Assignment 3Document3 paginiCryptography, Winter Term 16/17: Sample Solution To Assignment 3Anonymous rBz0OCgWyÎncă nu există evaluări
- Mat Lab Program For F SK Transmitter and ReceiverDocument3 paginiMat Lab Program For F SK Transmitter and Receiverben tenÎncă nu există evaluări
- A Good Lecture On QPSK TelecommunicationsDocument35 paginiA Good Lecture On QPSK Telecommunicationssid_senadheeraÎncă nu există evaluări
- DSP Lab 1Document3 paginiDSP Lab 1Anonymous PfQKLcTtÎncă nu există evaluări
- Time Frequency Analysis TutorialDocument19 paginiTime Frequency Analysis Tutorialiceman_10Încă nu există evaluări
- QURESHI Adaptive EqualizationDocument39 paginiQURESHI Adaptive EqualizationPoornima Pamulapati100% (1)
- DSP-Chapter4 Student 11012016Document32 paginiDSP-Chapter4 Student 11012016Lưu Văn HóaÎncă nu există evaluări
- DSP Lab ManualDocument54 paginiDSP Lab Manualkpsvenu100% (1)
- Harrier in IndiaDocument19 paginiHarrier in IndiaGirish Begoor100% (1)
- DSP Lab Manual AlignDocument134 paginiDSP Lab Manual AlignSilent Trigger GamingÎncă nu există evaluări
- Lecture 1Document40 paginiLecture 1Syed Abdullah Hasan ChishtiÎncă nu există evaluări
- What Is Channel EstimationDocument15 paginiWhat Is Channel EstimationShubham GuptaÎncă nu există evaluări
- Underwater Communications: Milica Stojanovic Massachusetts Institute of Technology Millitsa@mit - EduDocument16 paginiUnderwater Communications: Milica Stojanovic Massachusetts Institute of Technology Millitsa@mit - EduMansi JainÎncă nu există evaluări
- Digital Communication Lab ManualDocument21 paginiDigital Communication Lab ManualLinus Antonio50% (2)
- Communication Systems Lab ManualDocument74 paginiCommunication Systems Lab ManualHailin Arumiga100% (1)
- BPSK Matlab CodeDocument1 paginăBPSK Matlab Codesashi_s2100% (1)
- Adaptive Algorithms Seminar - FinalDocument19 paginiAdaptive Algorithms Seminar - FinalRutul Patel100% (1)
- EC2307-New Digital Communication Lab Manual Odd 2011Document53 paginiEC2307-New Digital Communication Lab Manual Odd 2011chenthiltrÎncă nu există evaluări
- Fir Filter Design Using MatlabDocument6 paginiFir Filter Design Using MatlabRashed Hossain MirajÎncă nu există evaluări
- Analysis of BER For M-Ary PSK With Rayleigh Fading Channel With AWGNDocument5 paginiAnalysis of BER For M-Ary PSK With Rayleigh Fading Channel With AWGNhiÎncă nu există evaluări
- Underwater CommunicationDocument16 paginiUnderwater Communicationsuman vvab100% (2)
- M-Aray QAMDocument4 paginiM-Aray QAMLy ThunnethÎncă nu există evaluări
- Study of Amplitude Modulation (AM) and Calculation of Modulation Index and SNR Using Matlab.Document5 paginiStudy of Amplitude Modulation (AM) and Calculation of Modulation Index and SNR Using Matlab.Md. Ruhul AminÎncă nu există evaluări
- Ec6512 Communication Systems Laboratory ManuslDocument86 paginiEc6512 Communication Systems Laboratory ManuslSriram71% (24)
- Wavelet TransformDocument41 paginiWavelet Transformarshi khan100% (1)
- Adaptive Filtering ApplicationsDocument410 paginiAdaptive Filtering Applications花玉良100% (1)
- Adaptive Filter NotesDocument26 paginiAdaptive Filter NotesRajnish Kumar0% (1)
- Pulse Amplitude ModulationDocument86 paginiPulse Amplitude ModulationPraful Jagtap100% (1)
- Fourier Analysis of Signals and SystemsDocument24 paginiFourier Analysis of Signals and SystemsBabul IslamÎncă nu există evaluări
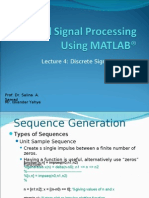
- DSP Using Matlab® - 4Document40 paginiDSP Using Matlab® - 4api-372116488% (8)
- Signals and SystemsDocument30 paginiSignals and SystemsMohammad Gulam Ahamad100% (3)
- Qam ReportDocument12 paginiQam ReportJAwad HAmeedÎncă nu există evaluări
- Diode and Its ApplicationsDocument39 paginiDiode and Its ApplicationsUsama SidhuÎncă nu există evaluări
- Signals and SystemsDocument3 paginiSignals and SystemsArjun Arjun100% (1)
- Designing A Lock-In Amplifier With Analog To Digital ConversionDocument27 paginiDesigning A Lock-In Amplifier With Analog To Digital Conversionessi12345Încă nu există evaluări
- Electronics & Communication Seminar Topic ListDocument6 paginiElectronics & Communication Seminar Topic ListArvind9781843623Încă nu există evaluări
- DC Notes PDFDocument151 paginiDC Notes PDFSharland GodinhoÎncă nu există evaluări
- Signals: From Analog To Digital: KL3184 - Lecture2 1Document27 paginiSignals: From Analog To Digital: KL3184 - Lecture2 1Thiruselvan ManianÎncă nu există evaluări
- Progress in Electromagnetics Research, PIER 98, 33-52, 2009Document20 paginiProgress in Electromagnetics Research, PIER 98, 33-52, 2009brij_astraÎncă nu există evaluări
- Signals and Systems 1Document30 paginiSignals and Systems 1Rakesh Inani100% (1)
- Sampling of Continuous Lab Project 1Document5 paginiSampling of Continuous Lab Project 1Nadia HarmacheÎncă nu există evaluări
- DSP Lab Manual Final Presidency UniversityDocument58 paginiDSP Lab Manual Final Presidency UniversitySUNIL KUMAR0% (1)
- Communications 2 EE555Document159 paginiCommunications 2 EE555ganadim9795Încă nu există evaluări
- Adaptive Filter Theory Course AssignmentDocument13 paginiAdaptive Filter Theory Course Assignmentgeorgez111Încă nu există evaluări
- Tut 3Document3 paginiTut 3rohankataria26100% (1)
- Pole-Zero Plots StabilityDocument9 paginiPole-Zero Plots StabilityNaveen SaiÎncă nu există evaluări
- Experiment 9 Frequency Shift Keying 8tZsUbuBn4Document3 paginiExperiment 9 Frequency Shift Keying 8tZsUbuBn4J100% (1)
- Problems Convolutional Codes PDFDocument12 paginiProblems Convolutional Codes PDFprbÎncă nu există evaluări
- Channel EstimationDocument26 paginiChannel Estimationrameshbe0480300% (1)
- Digital Control System-1Document47 paginiDigital Control System-1Makesh MäKzÎncă nu există evaluări
- Digital Signal Processing: Course OutlineDocument52 paginiDigital Signal Processing: Course OutlinefikretÎncă nu există evaluări
- Sampling and Quantization Theory For Image Processing: IraldiDocument5 paginiSampling and Quantization Theory For Image Processing: Iraldihub23Încă nu există evaluări
- DCT Presentation1Document39 paginiDCT Presentation1party0703Încă nu există evaluări
- Lec8 Optimum ReceiverDocument36 paginiLec8 Optimum ReceiverIbra NazlaÎncă nu există evaluări
- Lecture1 2upDocument11 paginiLecture1 2updewddudeÎncă nu există evaluări
- A Fast Algorithm of The DCT and IDCT For VLSI ImplementationDocument4 paginiA Fast Algorithm of The DCT and IDCT For VLSI ImplementationTom MathewÎncă nu există evaluări
- Cordic: (Coordinate Rotation Digital Computer)Document25 paginiCordic: (Coordinate Rotation Digital Computer)Magdalene MilanÎncă nu există evaluări
- Cordic: (Coordinate Rotation Digital Computer)Document25 paginiCordic: (Coordinate Rotation Digital Computer)santhiyadevÎncă nu există evaluări
- List of Limits A4 - Wikipedia PDFDocument23 paginiList of Limits A4 - Wikipedia PDFCrystal MaxÎncă nu există evaluări
- DeterminantsDocument26 paginiDeterminantsSoormaÎncă nu există evaluări
- Revision Notes Class - 8 Maths Chapter 1 - Rational NumbersDocument3 paginiRevision Notes Class - 8 Maths Chapter 1 - Rational NumbersTI- YASHÎncă nu există evaluări
- Mathematics Inverse TrigonometryDocument26 paginiMathematics Inverse TrigonometryKúmár ẞíjéñdräÎncă nu există evaluări
- Soln1 13Document7 paginiSoln1 13Γιάννης ΜπρούζοςÎncă nu există evaluări
- Lab 13Document3 paginiLab 13Balls Mahoney0% (1)
- Math 215 HW #11 SolutionsDocument6 paginiMath 215 HW #11 SolutionsJohn ManciaÎncă nu există evaluări
- James McivorDocument4 paginiJames McivorJulieth Pao BejaranoÎncă nu există evaluări
- Module 3 MCQDocument10 paginiModule 3 MCQsudheshÎncă nu există evaluări
- Algebra UnpluggedDocument173 paginiAlgebra UnpluggedSir SuneÎncă nu există evaluări
- 1 Mat071 Module1 PDFDocument100 pagini1 Mat071 Module1 PDFjurilyn alvadorÎncă nu există evaluări
- Gaussian Quadrature: Gauss 2Document7 paginiGaussian Quadrature: Gauss 2Michael Ayobami AdelekeÎncă nu există evaluări
- Performance Comparison of Gauss EliminatDocument5 paginiPerformance Comparison of Gauss EliminatAndrea MattiÎncă nu există evaluări
- S5 Maths Paper 1 2020 Term 1 Corona PDFDocument2 paginiS5 Maths Paper 1 2020 Term 1 Corona PDFMoses Junior100% (1)
- Secondary Maths 6Document77 paginiSecondary Maths 6Dav Gua67% (3)
- Department of Mathematics Prof. Dr. Gerd Baumann: Mathematics For Engineering MATH-301 Worksheet-2 - SolutionDocument17 paginiDepartment of Mathematics Prof. Dr. Gerd Baumann: Mathematics For Engineering MATH-301 Worksheet-2 - SolutionramyÎncă nu există evaluări
- A Useful Basis For Defective Matrices: Jordan Vectors and The Jordan FormDocument4 paginiA Useful Basis For Defective Matrices: Jordan Vectors and The Jordan FormABCÎncă nu există evaluări
- 2 Series: 2.1 Some Typical ExamplesDocument12 pagini2 Series: 2.1 Some Typical Examplespal.pallav9457Încă nu există evaluări
- Kiehn-Article-Topology and Topological Evolution of Clasic Electromagnetic Fields-1998Document36 paginiKiehn-Article-Topology and Topological Evolution of Clasic Electromagnetic Fields-1998Anonymous 9rJe2lOskxÎncă nu există evaluări
- K PointsDocument31 paginiK PointsTu Anh TranÎncă nu există evaluări
- Pre Calculus SyllabusDocument2 paginiPre Calculus Syllabuszoheb khanÎncă nu există evaluări
- Integration & Differentiation A3 NotesDocument16 paginiIntegration & Differentiation A3 NotesTshering TashiÎncă nu există evaluări
- Fuzzy Magic Labelling of Neutrosophic Path and Star GraphDocument12 paginiFuzzy Magic Labelling of Neutrosophic Path and Star GraphScience DirectÎncă nu există evaluări
- Linear TransformationsDocument12 paginiLinear Transformationsverma93Încă nu există evaluări
- AtestatDocument8 paginiAtestatclaudine tÎncă nu există evaluări
- B.sc. IV Semester Nep DSC M.Q.P.Document2 paginiB.sc. IV Semester Nep DSC M.Q.P.Shree SÎncă nu există evaluări
- Union and IntersectionDocument16 paginiUnion and IntersectionglaizaÎncă nu există evaluări
- 11TH BM QPDocument2 pagini11TH BM QPMadhumitha AÎncă nu există evaluări
- Image Chapter4 Part1Document6 paginiImage Chapter4 Part1Siraj Ud-DoullaÎncă nu există evaluări