S-ar putea să vă placă și
- E1PWAX 2011 v11n1 74Document8 paginiE1PWAX 2011 v11n1 74DAO VAN QUANÎncă nu există evaluări
- Novel LC Filter Design Extends PWM Inverter Control BandwidthDocument8 paginiNovel LC Filter Design Extends PWM Inverter Control BandwidthTamas VorosÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocument10 paginiLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasÎncă nu există evaluări
- BuckConverter Design Jpe10Document13 paginiBuckConverter Design Jpe10joviflocasÎncă nu există evaluări
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDocument38 paginiVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyÎncă nu există evaluări
- Commutation in HVDCDocument8 paginiCommutation in HVDCUsama ZafarÎncă nu există evaluări
- Zero-Voltage Switching For Three-Level Capacitor Clamping InverterDocument11 paginiZero-Voltage Switching For Three-Level Capacitor Clamping InverterTiền Hoàng VănÎncă nu există evaluări
- Ieee Current ModeDocument7 paginiIeee Current ModepqqpÎncă nu există evaluări
- Design and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorDocument5 paginiDesign and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorSEP-PublisherÎncă nu există evaluări
- Regulate transmission voltage with static VAR compensator (SVCDocument11 paginiRegulate transmission voltage with static VAR compensator (SVCsirishaÎncă nu există evaluări
- 48 Pulse PWMDocument6 pagini48 Pulse PWMWilliam JavierÎncă nu există evaluări
- J'14 - Analysis, Design and Performance of A Soft-Switching Single-Phase InverterDocument12 paginiJ'14 - Analysis, Design and Performance of A Soft-Switching Single-Phase Inverter閒雲野鶴Încă nu există evaluări
- Analog IC Design With Low-Dropout RegulatorsDocument374 paginiAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- Analysis and Simulation of Single Phase Inverter Controlled by Neural NetworkDocument14 paginiAnalysis and Simulation of Single Phase Inverter Controlled by Neural NetworknandhakumarmeÎncă nu există evaluări
- A Low Cost High Efficiency Inverter For Photovoltaic ApplicationsDocument6 paginiA Low Cost High Efficiency Inverter For Photovoltaic ApplicationsbpchimeraÎncă nu există evaluări
- SVC in Steel Manufacturing: An Indian Case: Single-Line Diagram of The SVC and EAFDocument2 paginiSVC in Steel Manufacturing: An Indian Case: Single-Line Diagram of The SVC and EAFshaikhsajid242Încă nu există evaluări
- Implementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerDocument6 paginiImplementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerAlonso CoradoÎncă nu există evaluări
- Heavy Load Light Load Conversion ReportDocument41 paginiHeavy Load Light Load Conversion ReportSanjivee SachinÎncă nu există evaluări
- Design and Optimization of On-Chip Voltage Regulators For High Performance ApplicationsDocument4 paginiDesign and Optimization of On-Chip Voltage Regulators For High Performance ApplicationsBaluvu JagadishÎncă nu există evaluări
- Family Controller PFCDocument8 paginiFamily Controller PFCWesley de PaulaÎncă nu există evaluări
- Generador de Señal Modulada Por Ancho de Pulso (PWM)Document4 paginiGenerador de Señal Modulada Por Ancho de Pulso (PWM)Juan PaÎncă nu există evaluări
- 3 Voltage Level Improving by Using Static VARDocument7 pagini3 Voltage Level Improving by Using Static VAREngr Muhammad Imran KhanÎncă nu există evaluări
- Chap 19Document55 paginiChap 19Arnab DeÎncă nu există evaluări
- A Variable Switching Frequency With Boost Power Factor Correction ConverterDocument8 paginiA Variable Switching Frequency With Boost Power Factor Correction ConverterJaya AhujaÎncă nu există evaluări
- A Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM StrategyDocument2 paginiA Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM Strategyskumar_61719Încă nu există evaluări
- Digital Current Limiting Techniques For Switching Power Supplies PDFDocument9 paginiDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraÎncă nu există evaluări
- Modeling and Control of an Advanced Static Var Compensator Using Three-Level InverterDocument6 paginiModeling and Control of an Advanced Static Var Compensator Using Three-Level InverterRaviraj KumbharÎncă nu există evaluări
- Unit 4Document15 paginiUnit 4prashantpnd07100% (2)
- An Introduction to Switched Mode Power Supply TopologiesDocument21 paginiAn Introduction to Switched Mode Power Supply Topologiesseahate100% (1)
- RWE Erickson Guide to Single-Phase Solar InvertersDocument27 paginiRWE Erickson Guide to Single-Phase Solar Invertersselaroth168Încă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetEvaluare: 2 din 5 stele2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Fix3 33333333Document4 paginiFix3 33333333doanminhtien030903Încă nu există evaluări
- DC To DC Converters: Version 2 EE IIT, Kharagpur 1Document10 paginiDC To DC Converters: Version 2 EE IIT, Kharagpur 1கிரிதரன் கிரிÎncă nu există evaluări
- Vsi Csi With Various LoadsDocument56 paginiVsi Csi With Various LoadsDeependra RastogiÎncă nu există evaluări
- SVPWM Thesis Prepared by DeekshitDocument81 paginiSVPWM Thesis Prepared by Deekshitchunduri_rambabuÎncă nu există evaluări
- Voltage ControlDocument37 paginiVoltage Controlمحمد سليمانÎncă nu există evaluări
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 paginiCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalÎncă nu există evaluări
- Control of HVDC Converter SystemsDocument50 paginiControl of HVDC Converter SystemsBikash DasÎncă nu există evaluări
- HVDC Unit IIDocument20 paginiHVDC Unit IISaduMunisekharÎncă nu există evaluări
- DC To DC Converters: Version 2 EE IIT, Kharagpur 1Document10 paginiDC To DC Converters: Version 2 EE IIT, Kharagpur 1Deepak Kumar RajakÎncă nu există evaluări
- Method of Voltage ControlDocument36 paginiMethod of Voltage ControlSANTHOSHÎncă nu există evaluări
- Welcome To All The Teacher's Of: SmitDocument30 paginiWelcome To All The Teacher's Of: Smitsrvdhar100% (2)
- PV Inverter System Structure and Control DesignDocument38 paginiPV Inverter System Structure and Control DesignAnggoro Indarto AkbarÎncă nu există evaluări
- Switched Mode Power SupplyDocument153 paginiSwitched Mode Power SupplyIvan222244Încă nu există evaluări
- 29-04-2021-1619695048-6-Ijeee-2. Ijeee - Power Quality Improvement Using Fuzzy Based StatcomDocument10 pagini29-04-2021-1619695048-6-Ijeee-2. Ijeee - Power Quality Improvement Using Fuzzy Based Statcomiaset123Încă nu există evaluări
- 1000w Inverter PURE SINE WAVE Schematic DiagramDocument153 pagini1000w Inverter PURE SINE WAVE Schematic Diagramjeevapillay100% (4)
- A 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersDocument4 paginiA 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersThanos van RamÎncă nu există evaluări
- Intersil - Selecting-A-Pwm-Controller For Narrow On Time Buck ConversionDocument7 paginiIntersil - Selecting-A-Pwm-Controller For Narrow On Time Buck ConversionIvana PrezimeÎncă nu există evaluări
- Power Factor CorrectionDocument43 paginiPower Factor Correctionravirnjn88Încă nu există evaluări
- Reactive Power Compensation: BY M.Sethu Madhavan EPE 15011D4914Document25 paginiReactive Power Compensation: BY M.Sethu Madhavan EPE 15011D4914chandra 798Încă nu există evaluări
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDe la EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDe la EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsEvaluare: 3.5 din 5 stele3.5/5 (6)
- Analog Circuit Design Volume Three: Design Note CollectionDe la EverandAnalog Circuit Design Volume Three: Design Note CollectionEvaluare: 3 din 5 stele3/5 (2)
- Power Systems-On-Chip: Practical Aspects of DesignDe la EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardÎncă nu există evaluări
- Electric - Motors Work PDFDocument40 paginiElectric - Motors Work PDFAnonymous L9fB0XUÎncă nu există evaluări
- MatlabDocument2 paginiMatlabEr Rajesh BuraÎncă nu există evaluări
- DC Motor Operation: This Is An Active Graphic. Click On Bold Type For Further IllustrationDocument4 paginiDC Motor Operation: This Is An Active Graphic. Click On Bold Type For Further IllustrationSTQ137Încă nu există evaluări
- DC Motor Operation: This Is An Active Graphic. Click On Bold Type For Further IllustrationDocument4 paginiDC Motor Operation: This Is An Active Graphic. Click On Bold Type For Further IllustrationSTQ137Încă nu există evaluări
- Power Factor Correction GuideDocument30 paginiPower Factor Correction Guidegosalhs9395Încă nu există evaluări
- Introduction To MATLAB 7 For Engineers: An Overview of MATLABDocument66 paginiIntroduction To MATLAB 7 For Engineers: An Overview of MATLABSTQ137Încă nu există evaluări
- UL 1564 SUN Rev 8 25 2020 ED 8 25 2022Document3 paginiUL 1564 SUN Rev 8 25 2020 ED 8 25 2022Joshua JonesÎncă nu există evaluări
- 3388 (LTFWP4F11)Document20 pagini3388 (LTFWP4F11)Akshay KumarÎncă nu există evaluări
- PCR049 MGDS 2 17 0001Document11 paginiPCR049 MGDS 2 17 0001DharmenderSinghChoudharyÎncă nu există evaluări
- RIC RG180 y RG 120Document1 paginăRIC RG180 y RG 120GabrielConsentidoÎncă nu există evaluări
- Residential & Commercial GeneratorsDocument16 paginiResidential & Commercial GeneratorsthecodekingÎncă nu există evaluări
- Ec13 Exp4-5 QuestionsDocument7 paginiEc13 Exp4-5 QuestionsJervin JamillaÎncă nu există evaluări
- Spare Parts List 2022: DS 610 2S - SLDocument6 paginiSpare Parts List 2022: DS 610 2S - SLAle MattÎncă nu există evaluări
- DAF CF Electrical System (To Chassis 0E621376) Service ManualDocument792 paginiDAF CF Electrical System (To Chassis 0E621376) Service ManualAlex100% (2)
- DC-to-AC and AC-to-AC converters guideDocument35 paginiDC-to-AC and AC-to-AC converters guidejck07100% (1)
- Hev 110809093417 Phpapp02 PDFDocument24 paginiHev 110809093417 Phpapp02 PDFjanardhanÎncă nu există evaluări
- Lamp LoadDocument5 paginiLamp LoadGirish Sahare100% (2)
- MUL ACS880 01 R1 R3 Quick Start GuideDocument74 paginiMUL ACS880 01 R1 R3 Quick Start GuideMinh Trieu NguyenÎncă nu există evaluări
- Lampu Son-Master Son-T Pia EcoDocument4 paginiLampu Son-Master Son-T Pia EcoDanang Wiryawan AdityatamaÎncă nu există evaluări
- PWM 6742 MRDocument13 paginiPWM 6742 MRluciobritÎncă nu există evaluări
- Free Energy GeneratorsDocument4 paginiFree Energy GeneratorsDedi IrawanÎncă nu există evaluări
- PSAO ProblemsDocument4 paginiPSAO ProblemsAshwath RameshÎncă nu există evaluări
- Kenwood SW301 501 MANUALDocument8 paginiKenwood SW301 501 MANUALjb68Încă nu există evaluări
- Motor Starters PresentationDocument24 paginiMotor Starters PresentationCosmin Calițcho100% (1)
- Premium - Datasheet - LVS V2.1 ENDocument2 paginiPremium - Datasheet - LVS V2.1 ENClem CZÎncă nu există evaluări
- 2010-08-20 001234 M11Code434TroubleshootingDocument13 pagini2010-08-20 001234 M11Code434TroubleshootingVictor Hugo Benitez Paez100% (1)
- Ismail Kasikci Short Circuits in Power SystemsDocument16 paginiIsmail Kasikci Short Circuits in Power Systemsarunkavi2012Încă nu există evaluări
- RC CouplingDocument9 paginiRC CouplingNoriel Louis SoteloÎncă nu există evaluări
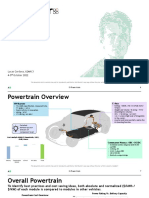
- E-Powertrain Cost Analysis and BenchmarkingDocument37 paginiE-Powertrain Cost Analysis and BenchmarkingRaúlÎncă nu există evaluări
- Trouble Shooting Guide (AMF) Panels OnlyDocument5 paginiTrouble Shooting Guide (AMF) Panels OnlySudipto MajumderÎncă nu există evaluări
- Per Unit System Lecture NotesDocument22 paginiPer Unit System Lecture NotesMukasa Mercy PeterÎncă nu există evaluări
- CHE100 Series Open Loop Vector InverterDocument135 paginiCHE100 Series Open Loop Vector InverterHuangRuanJin0% (1)
- RPADocument2 paginiRPAmehdivinciÎncă nu există evaluări
- INNOVATORS - Company ProfileDocument3 paginiINNOVATORS - Company Profileamit kaneÎncă nu există evaluări
- 04P - Interlocked Heavy Duty Plugs and Receptacles Hazardous PDFDocument20 pagini04P - Interlocked Heavy Duty Plugs and Receptacles Hazardous PDFWanessa SuárezÎncă nu există evaluări
- Analogic AVR: Operation ManualDocument13 paginiAnalogic AVR: Operation Manualhadi kasmuriÎncă nu există evaluări