S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- MZX-e: Equipment: Publication: Issue No. & Date: 5 02/10Document48 paginiMZX-e: Equipment: Publication: Issue No. & Date: 5 02/10Mutahirrasool100% (2)
- Cathode Ray Tube PresentationDocument16 paginiCathode Ray Tube PresentationamriscribdÎncă nu există evaluări
- A Preface On The BoilersDocument46 paginiA Preface On The Boilerslaloo01Încă nu există evaluări
- Preamp PDFDocument9 paginiPreamp PDFjohandry84Încă nu există evaluări
- SuperBassman Manual Rev-ADocument44 paginiSuperBassman Manual Rev-AAlexandre S. CorrêaÎncă nu există evaluări
- Virtual Forest - AC - SolutionDocument8 paginiVirtual Forest - AC - SolutionChandra KumarÎncă nu există evaluări
- 50 TOP FET Questions and Answers PDFDocument10 pagini50 TOP FET Questions and Answers PDFAasheeshSingh100% (2)
- Feedwater Heater Source BookDocument128 paginiFeedwater Heater Source Booksagar150350% (2)
- TransducersDocument24 paginiTransducersChandra Sekher Reddy BhimiReddyÎncă nu există evaluări
- 4 Pressure and Level MeasurementDocument127 pagini4 Pressure and Level MeasurementJincy K AbhrahamÎncă nu există evaluări
- Maintenance Guide HA-20,22, VETDocument43 paginiMaintenance Guide HA-20,22, VETAyaovi Jorlau75% (8)
- Moog New Tb117Document24 paginiMoog New Tb117Hammad Ali Zaman100% (1)
- Service Manual - MAC CLASS4006Document69 paginiService Manual - MAC CLASS4006Foued MbarkiÎncă nu există evaluări
- PPP PPP TTTTTDocument22 paginiPPP PPP TTTTTRitik VashisthÎncă nu există evaluări
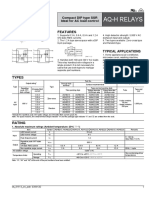
- Aq-H Relays: FeaturesDocument3 paginiAq-H Relays: Featuresmarcio carvalhoÎncă nu există evaluări
- Concentric Tube Exchanger (LAB MANUAL)Document18 paginiConcentric Tube Exchanger (LAB MANUAL)Atif MehfoozÎncă nu există evaluări
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualDocument162 paginiBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonÎncă nu există evaluări
- AUTO 306 Vacuum Coater Volume 2 - Operating InstructionsDocument52 paginiAUTO 306 Vacuum Coater Volume 2 - Operating Instructionsregulus7100% (1)
- Amplifying Devices and Low Pass Amplifier Design Cherry Hooper 1968Document1.070 paginiAmplifying Devices and Low Pass Amplifier Design Cherry Hooper 1968carlosulloaÎncă nu există evaluări
- Plasma TV: Service ManualDocument36 paginiPlasma TV: Service ManualPaiwan ChamnarnÎncă nu există evaluări
- LEd Expo 2011Document21 paginiLEd Expo 2011Swati SinghÎncă nu există evaluări
- Danfoss Kompresor BrosuruDocument16 paginiDanfoss Kompresor BrosuruIEA.BOD.I2 - Sơn, Vũ Văn - Giám đốc E&A - INTECH GROUPÎncă nu există evaluări
- IRC Instruction Manual PDFDocument54 paginiIRC Instruction Manual PDFMohamed HarbÎncă nu există evaluări
- E7290ax Mammography TubeDocument14 paginiE7290ax Mammography TubeHarold FernandezÎncă nu există evaluări
- Sampling MethodsDocument16 paginiSampling Methodsmaruf amaludinÎncă nu există evaluări
- Dadri Coal Failure of Electro Hydraulic Converter Ehc Follow Up PistonDocument6 paginiDadri Coal Failure of Electro Hydraulic Converter Ehc Follow Up PistonNIKHIL KSHIRSAGAR100% (1)
- X-Ray Equipment Maintenance and Repair HandbookDocument272 paginiX-Ray Equipment Maintenance and Repair HandbookEma Octaviani100% (1)
- What Is Magnetron?Document4 paginiWhat Is Magnetron?Ravi100% (1)
- 5 3 Way Ss ValveDocument12 pagini5 3 Way Ss ValveGopinath GunasekaranÎncă nu există evaluări
- Philips Chassis L9.1-E-Aa PDFDocument63 paginiPhilips Chassis L9.1-E-Aa PDFBigica BigicaqÎncă nu există evaluări