S-ar putea să vă placă și
- CPC Bearing Standardization (2019) S-001 (24-Oct-2019)Document2 paginiCPC Bearing Standardization (2019) S-001 (24-Oct-2019)Amit Kumar GuptaÎncă nu există evaluări
- SGR Ram Rate List PDFDocument315 paginiSGR Ram Rate List PDFAmit Kumar GuptaÎncă nu există evaluări
- Gangaram Rate List PDFDocument315 paginiGangaram Rate List PDFAmit Kumar Gupta100% (2)
- Valve Schedule PDFDocument119 paginiValve Schedule PDFAmit Kumar GuptaÎncă nu există evaluări
- Gangaram Rate List PDFDocument315 paginiGangaram Rate List PDFAmit Kumar GuptaÎncă nu există evaluări
- Textbook-Honeysuckle (Ncert) Supplementary Reader-Pact With The Sun Ncert Workbook S. NO. Syllabus Breakup 1 APRILDocument27 paginiTextbook-Honeysuckle (Ncert) Supplementary Reader-Pact With The Sun Ncert Workbook S. NO. Syllabus Breakup 1 APRILAmit Kumar GuptaÎncă nu există evaluări
- Textbook-Honeysuckle (Ncert) Supplementary Reader-Pact With The Sun Ncert Workbook S. NO. Syllabus Breakup 1 APRILDocument27 paginiTextbook-Honeysuckle (Ncert) Supplementary Reader-Pact With The Sun Ncert Workbook S. NO. Syllabus Breakup 1 APRILAmit Kumar GuptaÎncă nu există evaluări
- Both Station Transformers 3&4 TrippedDocument3 paginiBoth Station Transformers 3&4 TrippedAmit Kumar GuptaÎncă nu există evaluări
- Sample Financial PlanDocument45 paginiSample Financial PlanAmit Kumar Gupta100% (1)
- Isolation PDFDocument1 paginăIsolation PDFAmit Kumar GuptaÎncă nu există evaluări
- Pump CoatingDocument45 paginiPump CoatingAmit Kumar GuptaÎncă nu există evaluări
- CBSE Athletic RecordsDocument5 paginiCBSE Athletic RecordsAmit Kumar Gupta100% (3)
- By NR Commercial GroupDocument30 paginiBy NR Commercial GroupAmit Kumar GuptaÎncă nu există evaluări
- 1379009628wpdm - Look at The Picture and Complete The Word 1Document1 pagină1379009628wpdm - Look at The Picture and Complete The Word 1Amit Kumar GuptaÎncă nu există evaluări
- WWW - Bhulekh.up - Nic.in UP Bhulekh Land Records With Name and Khasara No Online Fard & Registry DetailsDocument4 paginiWWW - Bhulekh.up - Nic.in UP Bhulekh Land Records With Name and Khasara No Online Fard & Registry DetailsAmit Kumar Gupta67% (3)
- 210 MW Siemens V94.2 Gas Turbine Power PlantDocument5 pagini210 MW Siemens V94.2 Gas Turbine Power PlantAmit Kumar GuptaÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elektromos Hajtású Klímakompresszor Hybrid AutókbaDocument3 paginiElektromos Hajtású Klímakompresszor Hybrid AutókbaJózsef GyenesÎncă nu există evaluări
- Semiconductor Lasers For Optical CommunicationDocument9 paginiSemiconductor Lasers For Optical CommunicationVikash KumarÎncă nu există evaluări
- Capstone Project Report Vishal 2Document26 paginiCapstone Project Report Vishal 266 vishal madhukar sonawaneÎncă nu există evaluări
- AMP Regen Clamp SpecsheetDocument2 paginiAMP Regen Clamp SpecsheetElectromateÎncă nu există evaluări
- EAW KF750 Processor Settings - Rev1Document2 paginiEAW KF750 Processor Settings - Rev1Shawn DuncanÎncă nu există evaluări
- Signal and SystemDocument15 paginiSignal and Systemswap_k007100% (1)
- A 13486Document3 paginiA 13486Mohamed ShameemÎncă nu există evaluări
- 555 Audio Alarm ChartDocument4 pagini555 Audio Alarm Chartnasty_beerÎncă nu există evaluări
- Sequential Timer Modul ST6M1Document3 paginiSequential Timer Modul ST6M1Ricky Ocktavi RizkyÎncă nu există evaluări
- Mitos y Realidades en La Medición de Potemcia y Energía EléctricaDocument8 paginiMitos y Realidades en La Medición de Potemcia y Energía EléctricaAl BenavidezÎncă nu există evaluări
- Shake Table II User ManualDocument36 paginiShake Table II User ManualMgn SanÎncă nu există evaluări
- Manual Lenovo G555Document92 paginiManual Lenovo G555vukas24Încă nu există evaluări
- Summer Training Report NTPCDocument45 paginiSummer Training Report NTPCChetan MeenaÎncă nu există evaluări
- Gel Electrophoresis Power SupplyDocument9 paginiGel Electrophoresis Power Supplyمحمود صالح محمود عليÎncă nu există evaluări
- A Case Study On SCADA Implementation in 220 KV SubstationDocument11 paginiA Case Study On SCADA Implementation in 220 KV SubstationAnonymous ggwJDMh8Încă nu există evaluări
- Datasheet - HK Bd9526amuv 4672466Document5 paginiDatasheet - HK Bd9526amuv 4672466Sami MoqbelÎncă nu există evaluări
- Presentation For 3 Year Lab: Fundamentals of Logic GatesDocument28 paginiPresentation For 3 Year Lab: Fundamentals of Logic GatesAndrew NabilÎncă nu există evaluări
- Cathodic Protection System Using Ceramic AnodesDocument132 paginiCathodic Protection System Using Ceramic Anodesadeoye_okunoyeÎncă nu există evaluări
- Book 1 ProtectDocument8 paginiBook 1 ProtectWaleed AlzoudÎncă nu există evaluări
- Circuit Schematic SymbolsDocument7 paginiCircuit Schematic SymbolsRajesh KannanÎncă nu există evaluări
- Against Material For STG Project / Gso Maintainance Mepco MultanDocument4 paginiAgainst Material For STG Project / Gso Maintainance Mepco MultanShahzad ShafiÎncă nu există evaluări
- Thermometrics Temperature Sensor Solutions: AmphenolDocument16 paginiThermometrics Temperature Sensor Solutions: AmphenolFernando AbadÎncă nu există evaluări
- Detailed Lesson PlanDocument3 paginiDetailed Lesson PlanmatnogalfredÎncă nu există evaluări
- EECE 1312: Chapter 1: Introduction To Electronics Section 10 & 11 DR Aliza Aini MD RalibDocument51 paginiEECE 1312: Chapter 1: Introduction To Electronics Section 10 & 11 DR Aliza Aini MD RalibMuhammad nuruddinÎncă nu există evaluări
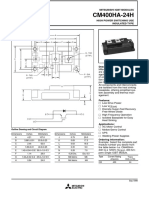
- Igbt Mitsubishi Cm400ha-24hDocument4 paginiIgbt Mitsubishi Cm400ha-24hELBIN RINCONÎncă nu există evaluări
- Universal Motor: Presented byDocument12 paginiUniversal Motor: Presented byAkash NiwalÎncă nu există evaluări
- 2.5, Quad, SPST, CMOS Analog Switches: General Description FeaturesDocument12 pagini2.5, Quad, SPST, CMOS Analog Switches: General Description FeaturesAlekseyyyÎncă nu există evaluări
- 100 Series: 100 Series Low-Profile Plug-In Smoke DetectorsDocument2 pagini100 Series: 100 Series Low-Profile Plug-In Smoke DetectorsLogan Marquez AguayoÎncă nu există evaluări
- Spin Tronic SDocument24 paginiSpin Tronic Ssrinivasa.b acchuÎncă nu există evaluări
- 05 Passion Pro Bsvi Fi Reckoner PDFDocument4 pagini05 Passion Pro Bsvi Fi Reckoner PDFZuber SheikhÎncă nu există evaluări