S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Lara LappaDocument3 paginiLara Lappaninara_wadhwaÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Batch 2010 Industrial Training GuidelinesDocument7 paginiBatch 2010 Industrial Training Guidelinesninara_wadhwaÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- FPGA apps range from DSP to med imagingDocument3 paginiFPGA apps range from DSP to med imagingninara_wadhwaÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Pong Tutorial - Game Maker 8Document21 paginiPong Tutorial - Game Maker 8ninara_wadhwaÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- GSMprojectDocument29 paginiGSMprojectChaminda AriyarathnaÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- SQL Basics PDFDocument28 paginiSQL Basics PDFArjun SainiÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Maglev SynopsisDocument4 paginiMaglev Synopsisninara_wadhwaÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- FREE Kaspersky Antivirus 2012 Offline Database Updater Download - TechnoJourneyDocument12 paginiFREE Kaspersky Antivirus 2012 Offline Database Updater Download - TechnoJourneyninara_wadhwaÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Amplitude Modulation and Demodulation LabDocument5 paginiAmplitude Modulation and Demodulation LabPriya BalakrishnanÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- 8051 Tutorial by (Craig Steiner)Document29 pagini8051 Tutorial by (Craig Steiner)Kaumudi TunuguntlaÎncă nu există evaluări
- U-PJT WASHER-MD SimpleUX WEB SSEC-01 EU EnglishDocument76 paginiU-PJT WASHER-MD SimpleUX WEB SSEC-01 EU EnglishszerenguettiÎncă nu există evaluări
- 1136 E01-ML01DP5 Usermanual EN V1.2Document11 pagini1136 E01-ML01DP5 Usermanual EN V1.2HectorÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- ADL MATRIX STRATEGY FOR BPCL'S GROWTHDocument17 paginiADL MATRIX STRATEGY FOR BPCL'S GROWTHSachin Nagar100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Exhaust Brake PDFDocument2 paginiExhaust Brake PDFFeliciaÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- CHB1 Assignmen5Document2 paginiCHB1 Assignmen5anhspidermenÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Information HandoutsDocument6 paginiInformation HandoutsPooja Marwadkar TupcheÎncă nu există evaluări
- Understanding Otdr Understanding-otdr-po-fop-tm-aePo Fop TM AeDocument1 paginăUnderstanding Otdr Understanding-otdr-po-fop-tm-aePo Fop TM AeAgus RiyadiÎncă nu există evaluări
- Teodorico M. Collano, JR.: ENRM 223 StudentDocument5 paginiTeodorico M. Collano, JR.: ENRM 223 StudentJepoyCollanoÎncă nu există evaluări
- CEILING BOARDING GUIDEDocument5 paginiCEILING BOARDING GUIDEahahÎncă nu există evaluări
- 713 Catalog PagesDocument2 pagini713 Catalog PagesJosé AcostaÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Subject and Content NotesDocument52 paginiSubject and Content NotesJoe Carl CastilloÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Super-Critical BoilerDocument32 paginiSuper-Critical BoilerAshvani Shukla100% (2)
- Gentle Classical Nature Sample - Units1 and 2Document129 paginiGentle Classical Nature Sample - Units1 and 2Carita HemsleyÎncă nu există evaluări
- 123 The Roots of International Law and The Teachings of Francisco de Vitoria As A FounDocument23 pagini123 The Roots of International Law and The Teachings of Francisco de Vitoria As A FounAki LacanlalayÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Volvo S6 66 Manual TransmissionDocument2 paginiVolvo S6 66 Manual TransmissionCarlosÎncă nu există evaluări
- Destination Phrasal Verbs @destination - b1 - b2 - c1Document25 paginiDestination Phrasal Verbs @destination - b1 - b2 - c1Samira GulomovaÎncă nu există evaluări
- Saes H 201Document9 paginiSaes H 201heartbreakkid132Încă nu există evaluări
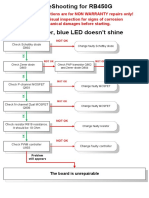
- RB450G Trouble ShootingDocument9 paginiRB450G Trouble Shootingjocimar1000Încă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Senior Design Projects 201-2020 - For Website - MEDocument5 paginiSenior Design Projects 201-2020 - For Website - MEYujbvhujgÎncă nu există evaluări
- Holacracy FinalDocument24 paginiHolacracy FinalShakil Reddy BhimavarapuÎncă nu există evaluări
- Documentation For UStarDocument26 paginiDocumentation For UStarthunder77Încă nu există evaluări
- MA4850 Supply Chain & Logistics ManagementDocument21 paginiMA4850 Supply Chain & Logistics ManagementQy LeeÎncă nu există evaluări
- DRM 25Document14 paginiDRM 25Anantha RajanÎncă nu există evaluări
- Brochure Troysperse+CD1+Brochure+ (TB0112)Document8 paginiBrochure Troysperse+CD1+Brochure+ (TB0112)mario3312Încă nu există evaluări
- Spectro Xepos Brochure 2016Document8 paginiSpectro Xepos Brochure 2016Mary100% (1)
- Stage TwoDocument34 paginiStage TwoThar LattÎncă nu există evaluări
- QUIZ 2 BUMA 20013 - Operations Management TQMDocument5 paginiQUIZ 2 BUMA 20013 - Operations Management TQMSlap ShareÎncă nu există evaluări
- Best Mesl StudoDocument15 paginiBest Mesl StudoJoenielÎncă nu există evaluări
- Dewatering Well PointsDocument4 paginiDewatering Well Pointssalloum3Încă nu există evaluări
- Materials For Oxygen ServicesDocument4 paginiMaterials For Oxygen Services陳0鴻Încă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)