S-ar putea să vă placă și
- Computer Methods in Power Systems Analysis with MATLABDe la EverandComputer Methods in Power Systems Analysis with MATLABÎncă nu există evaluări
- EE76 Power System Simulation LabDocument57 paginiEE76 Power System Simulation Labscientistabbas100% (2)
- Differential Forms on Electromagnetic NetworksDe la EverandDifferential Forms on Electromagnetic NetworksEvaluare: 4 din 5 stele4/5 (1)
- Pss Manual NewDocument34 paginiPss Manual Newറിജിൽ വി ആർÎncă nu există evaluări
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionDe la EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionÎncă nu există evaluări
- Power System Simulation Lab ManualDocument41 paginiPower System Simulation Lab ManualMary Morse100% (1)
- Foundations of Electromagnetic Compatibility: with Practical ApplicationsDe la EverandFoundations of Electromagnetic Compatibility: with Practical ApplicationsÎncă nu există evaluări
- Power System Simulation Lab ManualDocument41 paginiPower System Simulation Lab ManualgokulchandruÎncă nu există evaluări
- Handbook of Power Systems Engineering with Power Electronics ApplicationsDe la EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsÎncă nu există evaluări
- Power System Simulation Lab ManualDocument41 paginiPower System Simulation Lab ManualSasikala SivakumarÎncă nu există evaluări
- Solution Manual for 100 Genesys Design Examples: Second EditionDe la EverandSolution Manual for 100 Genesys Design Examples: Second EditionÎncă nu există evaluări
- Ee 1404 Power System Lab ManualDocument64 paginiEe 1404 Power System Lab ManualjayamanikandanÎncă nu există evaluări
- Power System Simulation Lab ManualDocument41 paginiPower System Simulation Lab ManualArivumani86% (14)
- Computation of Transmission Lines Parameters-Ex1Document10 paginiComputation of Transmission Lines Parameters-Ex1Anonymous gAVMpR0aÎncă nu există evaluări
- Ex-801 Caps Practical FileDocument20 paginiEx-801 Caps Practical FileShubham Pal100% (1)
- Ee2404 ManualDocument92 paginiEe2404 ManualsakkuumhÎncă nu există evaluări
- Ee 1404 Power System Lab ManualDocument63 paginiEe 1404 Power System Lab ManualSuhas Altruistic100% (1)
- EE16611 PSS Lab Manual-MergedDocument77 paginiEE16611 PSS Lab Manual-MergedPraveen SÎncă nu există evaluări
- Transmission Line Parameter CalculationDocument12 paginiTransmission Line Parameter Calculationksg9731100% (4)
- PS Simulation LabDocument41 paginiPS Simulation LabviksoniÎncă nu există evaluări
- Power System Analysis Lab ManualDocument71 paginiPower System Analysis Lab ManualAnkit Raj SinghÎncă nu există evaluări
- Ee 1404 Power System Lab ManualDocument64 paginiEe 1404 Power System Lab ManualPrasenjit DeyÎncă nu există evaluări
- PSS Lab Experiment 1Document7 paginiPSS Lab Experiment 1Soorya Priya Gopala KrishnaÎncă nu există evaluări
- BE20S03F003 PS-2 Practicals Rahul GadeDocument67 paginiBE20S03F003 PS-2 Practicals Rahul GadeSwapnil Gade007Încă nu există evaluări
- EE8711-Power System Simulation Lab ManualDocument155 paginiEE8711-Power System Simulation Lab ManualNagarajan MunusamyÎncă nu există evaluări
- EE8711-Power System Simulation Lab ManualDocument162 paginiEE8711-Power System Simulation Lab ManualAbdul YaseenÎncă nu există evaluări
- Matlab ProgramingDocument32 paginiMatlab ProgramingKorlpate BhaskarÎncă nu există evaluări
- EE6711-Power System Simulation LaboratoryDocument157 paginiEE6711-Power System Simulation LaboratoryTushar ChoudharyÎncă nu există evaluări
- Power System Simulation Laboratory PDFDocument162 paginiPower System Simulation Laboratory PDFraj selvarajÎncă nu există evaluări
- PSS Lab FinalDocument85 paginiPSS Lab FinalaggouniÎncă nu există evaluări
- Canara 10EEL78 - PSS - 2013 - Manual PDFDocument64 paginiCanara 10EEL78 - PSS - 2013 - Manual PDFoijhgvcxÎncă nu există evaluări
- Dijkstra Algorithm For Feeder Routing of Radial Distribution SystemDocument6 paginiDijkstra Algorithm For Feeder Routing of Radial Distribution SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalÎncă nu există evaluări
- Matlab CodeDocument3 paginiMatlab CodeAbdallAh ALi SmaDi50% (2)
- Line To Line Fault ExperimentsDocument7 paginiLine To Line Fault ExperimentsXian ChaoweÎncă nu există evaluări
- PSS Record 2020Document109 paginiPSS Record 2020DEEBIKA SÎncă nu există evaluări
- Comparison of HVDC Line Models in PSB Simulink BasedDocument6 paginiComparison of HVDC Line Models in PSB Simulink BasedAlan DrewÎncă nu există evaluări
- A Novel Theory of Three Phases To Eleven PhasesDocument7 paginiA Novel Theory of Three Phases To Eleven PhasesEditor IJRITCCÎncă nu există evaluări
- Saravanan Sia Lab 1Document18 paginiSaravanan Sia Lab 1Raja PerumalÎncă nu există evaluări
- Caps Lab Manual: Nri Institute of Information Science & Technology Departmet of Electrical & Electronics EngineeringDocument54 paginiCaps Lab Manual: Nri Institute of Information Science & Technology Departmet of Electrical & Electronics EngineeringRakesh KumarÎncă nu există evaluări
- Step by Step Ieee AWESOMEDocument6 paginiStep by Step Ieee AWESOMESimon Pedro Aguilar RiosÎncă nu există evaluări
- Transmission Line PaperDocument7 paginiTransmission Line PaperPaola Gomez PerezÎncă nu există evaluări
- Microwave - Experiment 5 - Coupler DesignDocument27 paginiMicrowave - Experiment 5 - Coupler DesignbangntsuÎncă nu există evaluări
- Set-A (List of Experiments Is Not Mentioned in RGPV Curriculum) Set-BDocument53 paginiSet-A (List of Experiments Is Not Mentioned in RGPV Curriculum) Set-BSyed Khurshid AlamÎncă nu există evaluări
- Dual Band Bandpass Filter Design: A Project ReportDocument10 paginiDual Band Bandpass Filter Design: A Project ReportAditya JainÎncă nu există evaluări
- EE6711-Power System Simulation Laboratory PDFDocument187 paginiEE6711-Power System Simulation Laboratory PDFவெங்கடேசன் மாரியப்பன்Încă nu există evaluări
- Models For Conductor Size Selection in Single Wire Earth Return Distribution NetworksDocument5 paginiModels For Conductor Size Selection in Single Wire Earth Return Distribution NetworksDiego CardenasÎncă nu există evaluări
- Https WWW - Suit.edu - PK Uploads Past Papers Power Transmission Distribution - EE2541Document2 paginiHttps WWW - Suit.edu - PK Uploads Past Papers Power Transmission Distribution - EE2541GHS Kass Korona MardanÎncă nu există evaluări
- EPTD - W4-L2 - Bundle Conductor & Effect of Earth On Cap - MAZSDocument18 paginiEPTD - W4-L2 - Bundle Conductor & Effect of Earth On Cap - MAZSMd Saif KhanÎncă nu există evaluări
- Psa Lab Ex - 1Document22 paginiPsa Lab Ex - 1samkousÎncă nu există evaluări
- The Journal of Engineering - 2017 - LV - Control For Offshore Wind Power Integration Based On Modular Multilevel ConverterDocument5 paginiThe Journal of Engineering - 2017 - LV - Control For Offshore Wind Power Integration Based On Modular Multilevel Converterengr.jahangeersoomroÎncă nu există evaluări
- Parameters in The Transmission LineDocument30 paginiParameters in The Transmission LineRaju ShanÎncă nu există evaluări
- A Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueDocument8 paginiA Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueAkash VermaÎncă nu există evaluări
- Ps Exp 1 PDFDocument6 paginiPs Exp 1 PDFrv_andeÎncă nu există evaluări
- 3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesDocument11 pagini3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesConstantin DorinelÎncă nu există evaluări
- Power Electrical Past PaperDocument5 paginiPower Electrical Past PaperNadeesha BandaraÎncă nu există evaluări
- PartDocument9 paginiPartnandhakumarmeÎncă nu există evaluări
- Lab Report 8Document4 paginiLab Report 8Shaheer AhmedÎncă nu există evaluări
- 05-HW 05 Soln Face PDFDocument3 pagini05-HW 05 Soln Face PDFBryan DavisÎncă nu există evaluări
- Impulse Voltage Generator Modelling Using MATLABDocument7 paginiImpulse Voltage Generator Modelling Using MATLABKsr AkhilÎncă nu există evaluări
- Cycle IDocument32 paginiCycle Idivya1587Încă nu există evaluări
- 2nd Yr Series Test - 1Document3 pagini2nd Yr Series Test - 1AnbalaganÎncă nu există evaluări
- Ee 1404 Power System Lab ManualDocument63 paginiEe 1404 Power System Lab ManualSuhas Altruistic100% (1)
- Psoc Unit 1 NotesDocument28 paginiPsoc Unit 1 NotesAnbalagan100% (1)
- Power System Operation and Control 2 Marks by Mr.M.SureshDocument19 paginiPower System Operation and Control 2 Marks by Mr.M.SureshMr.M.SureshÎncă nu există evaluări
- ' ' Shail Ahmad: Privet of India Acres N Inches List of ClientDocument3 pagini' ' Shail Ahmad: Privet of India Acres N Inches List of Clientapi-243316402Încă nu există evaluări
- (BDDJ-2016-0006) Introduction of New Printer NKG-901Document4 pagini(BDDJ-2016-0006) Introduction of New Printer NKG-901じゃしゅてぃん ぅうÎncă nu există evaluări
- Abstract Superstructure Conc - Frame WestgateDocument2 paginiAbstract Superstructure Conc - Frame WestgateTashamiswa MajachaniÎncă nu există evaluări
- DSCDocument7 paginiDSCthanhnguyenhhvnÎncă nu există evaluări
- Cembrit Patina Design Line - LowresDocument11 paginiCembrit Patina Design Line - LowresRaul AntonieÎncă nu există evaluări
- Zypper Cheat Sheet 2Document1 paginăZypper Cheat Sheet 2norbulinuksÎncă nu există evaluări
- Business Value of Bim in Middle EastDocument52 paginiBusiness Value of Bim in Middle EastshahbazdgÎncă nu există evaluări
- Professional CV FormatDocument2 paginiProfessional CV FormatShawn ParkerÎncă nu există evaluări
- Digital Data, Digital SignalDocument8 paginiDigital Data, Digital SignalBastomi Adi NugrohoÎncă nu există evaluări
- Regulatory Compliance and Generator ControlDocument59 paginiRegulatory Compliance and Generator ControlsulemankhalidÎncă nu există evaluări
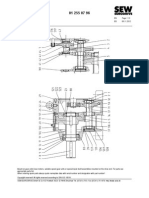
- Parts List 01 255 07 96: Helical Gear Unit R107Document3 paginiParts List 01 255 07 96: Helical Gear Unit R107Parmasamy Subramani50% (2)
- American Woodworker 163 2012-2013 PDFDocument76 paginiAmerican Woodworker 163 2012-2013 PDFkaskdos100% (1)
- Catalogue MV 07Document54 paginiCatalogue MV 07api-3815405100% (3)
- Plug Design Case StudyDocument24 paginiPlug Design Case StudyAnonymous EsZwKlnBÎncă nu există evaluări
- Digital Booklet - Oh My My (Deluxe) PDFDocument8 paginiDigital Booklet - Oh My My (Deluxe) PDFMehmet Akif DelibaşÎncă nu există evaluări
- 1-18 Easy Fix Double Glazing Counter Price ListDocument16 pagini1-18 Easy Fix Double Glazing Counter Price ListChris PaceyÎncă nu există evaluări
- 01-25 OB Bbs 3 Year Preboard 2076Document1 pagină01-25 OB Bbs 3 Year Preboard 2076Reestam SD100% (1)
- Pump Primer 1 AssDocument34 paginiPump Primer 1 AssGkou DojkuÎncă nu există evaluări
- EE 303 Tutorial 1Document19 paginiEE 303 Tutorial 1Syama SameekshaÎncă nu există evaluări
- Selected Books For Electronic Hobby Center (EHC) : A. Books (Available in The Resource Centre)Document9 paginiSelected Books For Electronic Hobby Center (EHC) : A. Books (Available in The Resource Centre)Rajalakshmi BashyamÎncă nu există evaluări
- iJARS1266AUTH PDFDocument17 paginiiJARS1266AUTH PDFAarti GoutamÎncă nu există evaluări
- AcknowledgementDocument4 paginiAcknowledgementPurna GuptaÎncă nu există evaluări
- Chapter 5e ch05 HallDocument9 paginiChapter 5e ch05 HallGlorden Mae Ibañez SalandananÎncă nu există evaluări
- BS en 00480-6-2005 PDFDocument8 paginiBS en 00480-6-2005 PDFShan Sandaruwan AbeywardeneÎncă nu există evaluări
- LSZH Apch11 Rwy28 IlsDocument1 paginăLSZH Apch11 Rwy28 Ilssamykarim2009Încă nu există evaluări
- NASA MissionsDocument62 paginiNASA MissionsRoman FlorinÎncă nu există evaluări
- Experiment No. 1: Aim: Study of Tanner Tools THEORY: Tanner ToolsDocument24 paginiExperiment No. 1: Aim: Study of Tanner Tools THEORY: Tanner ToolsVarun GargÎncă nu există evaluări
- Surveyor C.VDocument2 paginiSurveyor C.VMasood Shabbir Khan Niazi100% (1)
- Security Officer/GuardDocument2 paginiSecurity Officer/Guardapi-121358674Încă nu există evaluări
- DC and AC InterferenceDocument40 paginiDC and AC InterferenceREJI JOY ThoppilÎncă nu există evaluări