S-ar putea să vă placă și
- Fuente Positiva y Fuente AltaDocument7 paginiFuente Positiva y Fuente Altajose gomezÎncă nu există evaluări
- DIP METER para HF y VHF - Radioaficion Ham RadioDocument8 paginiDIP METER para HF y VHF - Radioaficion Ham RadioCarlos Alejandro Uribe SwittÎncă nu există evaluări
- Fuente voltaje variable LM317T 1.5-20V 1.5ADocument4 paginiFuente voltaje variable LM317T 1.5-20V 1.5ACARLOS_NETÎncă nu există evaluări
- EA-03 Codificador EstéreoDocument10 paginiEA-03 Codificador EstéreoPCTrax55 tutos100% (1)
- Prac 9 EpDocument22 paginiPrac 9 EpmoisesÎncă nu există evaluări
- Guia Osciloscopio DigitalDocument7 paginiGuia Osciloscopio DigitalБорис МэяÎncă nu există evaluări
- Bienvenidos: Sesión 02Document10 paginiBienvenidos: Sesión 02David ZeladaÎncă nu există evaluări
- Amplificadores DigitalesDocument6 paginiAmplificadores DigitalesfredyariasdÎncă nu există evaluări
- Curso Transferencia TecnologicaDocument8 paginiCurso Transferencia TecnologicaPablo HernandezÎncă nu există evaluări
- Método de Ajuste y Reparación para Radios Con CI LA1828 Electrónica CompletaDocument16 paginiMétodo de Ajuste y Reparación para Radios Con CI LA1828 Electrónica CompletaLuis ArdilaÎncă nu există evaluări
- Practica 5Document4 paginiPractica 5Orlando CabreraÎncă nu există evaluări
- Fotos Mocoa Protagonistashistoria 2Document173 paginiFotos Mocoa Protagonistashistoria 2ronald_daza_3Încă nu există evaluări
- Qué es un relé? Descripción, tipos e historiaDocument4 paginiQué es un relé? Descripción, tipos e historiaNiko TeslaÎncă nu există evaluări
- Circuitos RCDocument21 paginiCircuitos RCCarlos Andrés ValverdeÎncă nu există evaluări
- Emisora AmDocument1 paginăEmisora AmNixon Estefano Ortiz MoralesÎncă nu există evaluări
- Generando Una Funcion de Onda DeseadaDocument6 paginiGenerando Una Funcion de Onda DeseadaSteven Alexander Buritica MartinezÎncă nu există evaluări
- Receptor FM de 3 integrados para aprender electrónicaDocument9 paginiReceptor FM de 3 integrados para aprender electrónicabenjinavaÎncă nu există evaluări
- Generador AF-RF: guía completa para construir un generador de audio y radiofrecuenciaDocument5 paginiGenerador AF-RF: guía completa para construir un generador de audio y radiofrecuenciaDaniel PiovanoÎncă nu există evaluări
- Ahorro Con Variación de Frecuencia en RefrigeraciónDocument22 paginiAhorro Con Variación de Frecuencia en RefrigeraciónYohanespuentesÎncă nu există evaluări
- Latch y flip-flop: Análisis de circuitos con NE555, 74LS02 y TTL7473Document9 paginiLatch y flip-flop: Análisis de circuitos con NE555, 74LS02 y TTL7473franz barraÎncă nu există evaluări
- 2 El Amplificador de Audio PDFDocument17 pagini2 El Amplificador de Audio PDFEdgar MongeÎncă nu există evaluări
- Onda Senoidal Con ArduinoDocument5 paginiOnda Senoidal Con ArduinoDuván Ricardo GuzmánÎncă nu există evaluări
- Ejemplos y Practicas 7 y 8 Timer 1Document8 paginiEjemplos y Practicas 7 y 8 Timer 1lfba_16Încă nu există evaluări
- CronoCronometro Digital Controlado Por Bluetooth en Una Aplicación Androidmetro Digital Controlado Por Bluetooth en Una Aplicación AndroidDocument10 paginiCronoCronometro Digital Controlado Por Bluetooth en Una Aplicación Androidmetro Digital Controlado Por Bluetooth en Una Aplicación AndroidHarold Stiven Amaya VillamilÎncă nu există evaluări
- Probador de Capacitores ElectrolíticosDocument5 paginiProbador de Capacitores ElectrolíticosMaderson Chamorro100% (1)
- 12V Inverter SolderingDocument2 pagini12V Inverter SolderingJeremias HabacucÎncă nu există evaluări
- Módulo YL69 y YL38Document1 paginăMódulo YL69 y YL38Forumsur Argentina50% (2)
- ReceptorDocument3 paginiReceptorPablo LemaÎncă nu există evaluări
- Hum38 PDFDocument52 paginiHum38 PDFJosefa HualamanÎncă nu există evaluări
- Protocolo de Comunicacion UsbDocument4 paginiProtocolo de Comunicacion UsbBRIANT VALLES VADILLOÎncă nu există evaluări
- Curso de Electronica Digital RADIO INSTITUTODocument169 paginiCurso de Electronica Digital RADIO INSTITUTOeduardo_albornoz_5100% (4)
- Scopes Student Labs ESDocument26 paginiScopes Student Labs ESKarolina PintoÎncă nu există evaluări
- Antena de Hilo LargoDocument3 paginiAntena de Hilo LargoDemis Harold Angulo HerreraÎncă nu există evaluări
- Fuente Variable 3-16Document2 paginiFuente Variable 3-16Steren MéxicoÎncă nu există evaluări
- Modos de Propagación y Tipos de AntenasDocument39 paginiModos de Propagación y Tipos de Antenasanddy181219871570Încă nu există evaluări
- 4-035 Dimmer Control X PCDocument8 pagini4-035 Dimmer Control X PCcfrias_13Încă nu există evaluări
- Programación de microcontrolador PIC16F628A para visualización en display 7 segmentosDocument18 paginiProgramación de microcontrolador PIC16F628A para visualización en display 7 segmentosJulio RamírezÎncă nu există evaluări
- Alarma Despertador Con ArduinoDocument18 paginiAlarma Despertador Con ArduinorobertoÎncă nu există evaluări
- Arduino MyOpenlabDocument0 paginiArduino MyOpenlabEmilio QuinterosÎncă nu există evaluări
- MatlabDocument4 paginiMatlabjosgauÎncă nu există evaluări
- Electronica Practica PBP PDFDocument145 paginiElectronica Practica PBP PDFelkillyÎncă nu există evaluări
- Manual AutocadDocument29 paginiManual AutocadMauro CastilloÎncă nu există evaluări
- Bus I2C de ArduinoDocument35 paginiBus I2C de ArduinoAmarlo EuÎncă nu există evaluări
- Unit2 Akhmad Musthofa Munir 40040319650022Document7 paginiUnit2 Akhmad Musthofa Munir 40040319650022Akhmad MusthofaÎncă nu există evaluări
- I 2 CDocument2 paginiI 2 CJosejÎncă nu există evaluări
- Comunicacion I2C Entre ArduinosDocument5 paginiComunicacion I2C Entre ArduinosIvan ZapataÎncă nu există evaluări
- Codigos ArduinoDocument14 paginiCodigos ArduinoWillbert NungarayÎncă nu există evaluări
- Protocolo I2C y Arduino WordDocument3 paginiProtocolo I2C y Arduino WorddanielÎncă nu există evaluări
- ArduinoISP Versión 04m3Document15 paginiArduinoISP Versión 04m3juan carlos muñoz camposÎncă nu există evaluări
- Cap4 comunicacionSerialArduinoDocument8 paginiCap4 comunicacionSerialArduinoceciliaalvarengaÎncă nu există evaluări
- Comunicaciones RS485Document31 paginiComunicaciones RS485jbrunobÎncă nu există evaluări
- Control LED con GalileoDocument18 paginiControl LED con GalileoCamila Segura OcampoÎncă nu există evaluări
- Comunicación I2CDocument20 paginiComunicación I2Cpalaciosfulgencio3Încă nu există evaluări
- Como Mostrar Los Pines Analógica Con Shild Ethernet de ArduinoDocument7 paginiComo Mostrar Los Pines Analógica Con Shild Ethernet de ArduinoJhoel AdrianÎncă nu există evaluări
- Documento AudrinoDocument30 paginiDocumento AudrinoEthel HaihtÎncă nu există evaluări
- P06 Entrada y Salida de Datos en ArduinoDocument7 paginiP06 Entrada y Salida de Datos en ArduinoAns Shel Cardenas YllanesÎncă nu există evaluări
- Prácticas de redes de datos e industrialesDe la EverandPrácticas de redes de datos e industrialesEvaluare: 4 din 5 stele4/5 (5)
- Simulación de circuitos electrónicos con OrCAD® PSpice®De la EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Încă nu există evaluări
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe la EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaÎncă nu există evaluări
- Sistemas GeodesicosDocument55 paginiSistemas Geodesicosdanielsan74Încă nu există evaluări
- Entendiendo La Proyeccion de Los MapasDocument20 paginiEntendiendo La Proyeccion de Los Mapaselrayo07Încă nu există evaluări
- Estandares Geodesicos PDFDocument35 paginiEstandares Geodesicos PDFaquiles rondinel barbozaÎncă nu există evaluări
- Radios Enlaces & Switch para Video IP (2019)Document54 paginiRadios Enlaces & Switch para Video IP (2019)danielsan74Încă nu există evaluări
- Manual Mapsource en EspañolDocument52 paginiManual Mapsource en EspañolPABLO GRANJAÎncă nu există evaluări
- Manual Geo Explorer 2005Document140 paginiManual Geo Explorer 2005Fabian Arley Paladines Valencia100% (1)
- Guia Pathfinder GPSDocument29 paginiGuia Pathfinder GPSMarco CardonaÎncă nu există evaluări
- DAHUA Acceso Con Smart Phone Via P2P A Un HCVR XVR NVRDocument5 paginiDAHUA Acceso Con Smart Phone Via P2P A Un HCVR XVR NVRdanielsan74Încă nu există evaluări
- DAHUA Acceso Desde Internet Explorer A Un DVR NVR IPCDocument3 paginiDAHUA Acceso Desde Internet Explorer A Un DVR NVR IPCdanielsan74Încă nu există evaluări
- DAHUA Acceso Con Smart Phone Via P2P A Un HCVR XVR NVR PDFDocument5 paginiDAHUA Acceso Con Smart Phone Via P2P A Un HCVR XVR NVR PDFdanielsan74Încă nu există evaluări
- Uso Del POISelectorDocument3 paginiUso Del POISelectorpmuleiroÎncă nu există evaluări
- Resumen para La DescargaDocument7 paginiResumen para La Descargadanielsan74Încă nu există evaluări
- Apuntes de Mecanismos, 2° ED - Victoria Kent PDFDocument7 paginiApuntes de Mecanismos, 2° ED - Victoria Kent PDFdanielsan74Încă nu există evaluări
- Metodos Numericos Con Matlab, 1° ED. - A. Cordero Barbero & E. Martínez MoladDocument504 paginiMetodos Numericos Con Matlab, 1° ED. - A. Cordero Barbero & E. Martínez Moladidontknow_86Încă nu există evaluări
- Manual HP3845Document104 paginiManual HP3845danielsan74Încă nu există evaluări
- Cap.6 Barreras InfrarrojasDocument10 paginiCap.6 Barreras InfrarrojasEdwinEscobedoCoaguila100% (2)
- Manual de Usuario GPS Garmin - ME Terrero Etrex 10-20-30Document60 paginiManual de Usuario GPS Garmin - ME Terrero Etrex 10-20-30buzonhdlaÎncă nu există evaluări
- Coleccion de CircuitosDocument93 paginiColeccion de Circuitosapi-19959636100% (8)
- SIG - Conceptos BásicosDocument6 paginiSIG - Conceptos Básicosdanielsan74Încă nu există evaluări
- Laboratorio de Sensores Fabricacion de SensoresDocument48 paginiLaboratorio de Sensores Fabricacion de SensoresGregory SuberoÎncă nu există evaluări
- Análisis de Sistemas Eléctricos de Potencia - William D. Stevenson (2da Edición)Document207 paginiAnálisis de Sistemas Eléctricos de Potencia - William D. Stevenson (2da Edición)Willian Jacinto67% (3)
- Apuntes de Procesamiento Digital de Imagenes 1° BORRADOR Jose Ramon Mejia ViletDocument100 paginiApuntes de Procesamiento Digital de Imagenes 1° BORRADOR Jose Ramon Mejia ViletJuliana Osorio ArcilaÎncă nu există evaluări
- Curso Qgis Loja 2010Document102 paginiCurso Qgis Loja 2010Arnold Fernández R.100% (4)
- Cap.6 Barreras InfrarrojasDocument10 paginiCap.6 Barreras InfrarrojasEdwinEscobedoCoaguila100% (2)
- Pinbn Anexo Manual Cartografia SigDocument61 paginiPinbn Anexo Manual Cartografia SigRanulfo Maya VargasÎncă nu există evaluări
- Arduino BarrutikDocument50 paginiArduino Barrutikkarlossukunza100% (1)
- Antena RingoDocument2 paginiAntena Ringodanielsan74Încă nu există evaluări
- Cargador de BateriaDocument4 paginiCargador de BateriaJose BerrospiÎncă nu există evaluări
- SQL Server Express - Instalacion y ConfiguracionDocument20 paginiSQL Server Express - Instalacion y Configuraciondanielsan74Încă nu există evaluări
- Operaciones Unitarias SerDocument1 paginăOperaciones Unitarias SerJairo Martinez HernandezÎncă nu există evaluări
- Pic 16f628aDocument3 paginiPic 16f628aJuanSe Vasquez CrissÎncă nu există evaluări
- Cómo Identificar Un Bloqueo en OracleDocument8 paginiCómo Identificar Un Bloqueo en OracleFederico CandiaÎncă nu există evaluări
- Afilado del cuchillo para calzadoDocument5 paginiAfilado del cuchillo para calzadoObed SusunagaÎncă nu există evaluări
- Trabajo de Auditoria de Sistemas Paul CabezasDocument3 paginiTrabajo de Auditoria de Sistemas Paul CabezasPaul Alejandro Cabezas JuradoÎncă nu există evaluări
- Campo MagneticoDocument9 paginiCampo MagneticoJhoel QuijanoÎncă nu există evaluări
- CEDULADocument2 paginiCEDULALaura ContrerasÎncă nu există evaluări
- Accidente mortal de conductor de bus en ruta Puquio-NazcaDocument34 paginiAccidente mortal de conductor de bus en ruta Puquio-Nazca1angel777Încă nu există evaluări
- Seccion 03Document11 paginiSeccion 03gpro7929Încă nu există evaluări
- Proceso Constructivo de La Residencia Del Señor Jose PalaciosDocument15 paginiProceso Constructivo de La Residencia Del Señor Jose PalaciosJose peñafielÎncă nu există evaluări
- Abreviaturas de Comandos de Autocad en InglesDocument8 paginiAbreviaturas de Comandos de Autocad en InglesJeorge Esrom ChambiÎncă nu există evaluări
- 1 Representación de SepDocument10 pagini1 Representación de SepUziel Manuel Miramontes LeyvaÎncă nu există evaluări
- Lavado Asfaltico EXPOSICIONDocument27 paginiLavado Asfaltico EXPOSICIONLISHETH DIANA ARIAS PINEDAÎncă nu există evaluări
- Previo 6 Respuesta de Frecuencia de Circuitos en CADocument8 paginiPrevio 6 Respuesta de Frecuencia de Circuitos en CAHiuston Cueto CcoriÎncă nu există evaluări
- Ejemplo Guia APU ObraDocument127 paginiEjemplo Guia APU ObraCatalina Alba SantaÎncă nu există evaluări
- Permeabilidad de Los SuelosDocument10 paginiPermeabilidad de Los SuelosSara MatiÎncă nu există evaluări
- Ensayo de dureza Brinell: Descripción y aplicaciones del métodoDocument4 paginiEnsayo de dureza Brinell: Descripción y aplicaciones del métodoLudwin Valencia OviedoÎncă nu există evaluări
- Convertidores GTO potenciaDocument5 paginiConvertidores GTO potenciaOmar Pérez MtzÎncă nu există evaluări
- Procesos de fabricación no convencionales UZVDocument42 paginiProcesos de fabricación no convencionales UZVEudo ValbuenaÎncă nu există evaluări
- Embalaje y TransporteDocument3 paginiEmbalaje y Transportewalter castañoÎncă nu există evaluări
- PVCDocument12 paginiPVCyeimy cruz farcequeÎncă nu există evaluări
- Simbologia Diagramas EléctricosDocument73 paginiSimbologia Diagramas EléctricosTALCA VICENTE ANDRE BRAVO MORAGAÎncă nu există evaluări
- FISICA PRIMERA LETY TEMODINAMICA SimuladorDocument12 paginiFISICA PRIMERA LETY TEMODINAMICA SimuladorLuis RosasÎncă nu există evaluări
- Trucos Útiles Al Crear Nuestros Archivos BatchDocument6 paginiTrucos Útiles Al Crear Nuestros Archivos BatchmanumelenasÎncă nu există evaluări
- P 23Document1 paginăP 23David MoyaÎncă nu există evaluări
- Bitacoras SenaDocument3 paginiBitacoras SenaMary Luz Leon AlvarezÎncă nu există evaluări
- Modelos Removibles y DesechablesDocument6 paginiModelos Removibles y Desechableshugo0% (1)
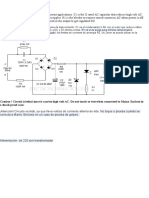
- Circuit OsDocument4 paginiCircuit OsCARLOSARTETA100% (1)
- M0X - Introduccion 1830Document6 paginiM0X - Introduccion 1830german villalobos100% (1)
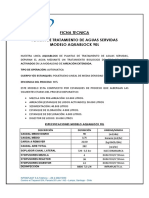
- Ficha Tecnica Aqb 90l EstandarDocument2 paginiFicha Tecnica Aqb 90l EstandaringearroyoÎncă nu există evaluări