S-ar putea să vă placă și
- FPGA Selection: LTC2387-18 S.No Pin - Name Pin - No. - ADC Mode PurposeDocument6 paginiFPGA Selection: LTC2387-18 S.No Pin - Name Pin - No. - ADC Mode PurposeGurinder Pal SinghÎncă nu există evaluări
- Xapp1082 Zynq Eth PDFDocument12 paginiXapp1082 Zynq Eth PDFAhmedAlazzawiÎncă nu există evaluări
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDe la EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionÎncă nu există evaluări
- Asic Prototyping AldecDocument10 paginiAsic Prototyping AldecKhaled Abou ElseoudÎncă nu există evaluări
- Tutorial Using SCI For Waveform MonitoringDocument14 paginiTutorial Using SCI For Waveform MonitoringMarcus Vinicius CostaÎncă nu există evaluări
- PWMDocument57 paginiPWMAhmed Mortuza Saleque SaikotÎncă nu există evaluări
- Development of FPGA Based Smart Controller For Speed Control of BLDC MotorDocument7 paginiDevelopment of FPGA Based Smart Controller For Speed Control of BLDC MotorInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- C28x WorkshopDocument400 paginiC28x WorkshopMarcio De Andrade VogtÎncă nu există evaluări
- Arm Amba AhbDocument18 paginiArm Amba AhbgeethaÎncă nu există evaluări
- SPI I2C Interface AnDocument13 paginiSPI I2C Interface AnNivin PaulÎncă nu există evaluări
- Module 01 PDFDocument26 paginiModule 01 PDFabs4everonlineÎncă nu există evaluări
- Implementing A USB 2.0 IntellectualDocument78 paginiImplementing A USB 2.0 IntellectualDhananjay PatilÎncă nu există evaluări
- VHDL Coding Tips and TricksDocument209 paginiVHDL Coding Tips and TricksvinutaÎncă nu există evaluări
- SPI in RaspberryPiDocument8 paginiSPI in RaspberryPiMohammed PublicationsÎncă nu există evaluări
- System Verilog TrainingDocument2 paginiSystem Verilog TrainingVlsi GuruÎncă nu există evaluări
- 2.1. Overview of PCI Express BusDocument19 pagini2.1. Overview of PCI Express BusSomasekhar ChepuriÎncă nu există evaluări
- Fpga Based System DesignDocument30 paginiFpga Based System DesignKrishna Kumar100% (1)
- Lal Usb Interface Vlsi 2010Document22 paginiLal Usb Interface Vlsi 2010Ygb RedaÎncă nu există evaluări
- FPGA ArchitectureDocument39 paginiFPGA ArchitectureeeshgargÎncă nu există evaluări
- 8085 Vs 8086Document3 pagini8085 Vs 8086Faisal Al-Balushi100% (4)
- USB Protocol Specification: Data Encoding/DecodingDocument12 paginiUSB Protocol Specification: Data Encoding/DecodingUtpal100% (5)
- MAC AddressDocument1 paginăMAC AddressMohammed PublicationsÎncă nu există evaluări
- Pcie Express Power ManagementDocument15 paginiPcie Express Power ManagementKranthi KumarÎncă nu există evaluări
- Zynq 7020Document4 paginiZynq 7020NGUYỄN HOÀNG LINHÎncă nu există evaluări
- Computer ArchitectureDocument104 paginiComputer ArchitectureapuurvaÎncă nu există evaluări
- Interfacing and Some Common Building Blocks: Coe 111: Advanced Digital DesignDocument35 paginiInterfacing and Some Common Building Blocks: Coe 111: Advanced Digital DesignFrancisÎncă nu există evaluări
- Dspa 17ec751 M5Document34 paginiDspa 17ec751 M5digital loveÎncă nu există evaluări
- New Cortex-R Processors For Lte and 4g Mobile BasebandDocument6 paginiNew Cortex-R Processors For Lte and 4g Mobile BasebandSaiteja ReddyÎncă nu există evaluări
- ESARM Unit-III and IV Slides MergedDocument301 paginiESARM Unit-III and IV Slides MergedShashipreetham LakkakulaÎncă nu există evaluări
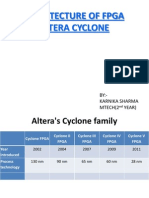
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Document29 paginiArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- 8B10B CodingDocument29 pagini8B10B CodingRamakrishnaRao SoogooriÎncă nu există evaluări
- Digital Electronics QuestionsDocument8 paginiDigital Electronics QuestionsShivamahendar SunkaÎncă nu există evaluări
- Zynq DocumentationDocument82 paginiZynq Documentationgopi krishna100% (1)
- Orcad PSpice DesignerDocument47 paginiOrcad PSpice DesignerAishwarya JS100% (1)
- Serial Peripheral InterfaceDocument5 paginiSerial Peripheral InterfaceabhinavbitÎncă nu există evaluări
- Oxford Semiconductor PCIeDocument2 paginiOxford Semiconductor PCIeisoam123Încă nu există evaluări
- VHDL PDFDocument112 paginiVHDL PDFvivek patelÎncă nu există evaluări
- Unit Ii ArmDocument243 paginiUnit Ii ArmMani BharathiÎncă nu există evaluări
- TelnetDocument2 paginiTelnetMohammed PublicationsÎncă nu există evaluări
- Implementing Communication Bridge Between I2C and APBDocument4 paginiImplementing Communication Bridge Between I2C and APBDon RajuÎncă nu există evaluări
- Microprocessor UNIT - IVDocument87 paginiMicroprocessor UNIT - IVMani GandanÎncă nu există evaluări
- Assignment4 PDFDocument9 paginiAssignment4 PDFlavishÎncă nu există evaluări
- Digital QuestionsDocument3 paginiDigital QuestionsCLARITY UDTÎncă nu există evaluări
- VHDL Bram BromDocument9 paginiVHDL Bram BromGmit MandyaÎncă nu există evaluări
- 04 14 LTSSM Implementation at 5GTs and Beyond PDFDocument18 pagini04 14 LTSSM Implementation at 5GTs and Beyond PDFHardik TrivediÎncă nu există evaluări
- ArmDocument32 paginiArmSaraschandraa NaiduÎncă nu există evaluări
- Introduction To System On ChipDocument110 paginiIntroduction To System On ChipKiệt PhạmÎncă nu există evaluări
- SATA Transport LayerDocument24 paginiSATA Transport LayerkubendrÎncă nu există evaluări
- I2C Interfacing To XC3S400 FPGADocument14 paginiI2C Interfacing To XC3S400 FPGAMahesh BhatkalÎncă nu există evaluări
- Overview of PCI ExpressDocument38 paginiOverview of PCI Expressasic_master0% (1)
- Bus StructureDocument160 paginiBus StructureRohit SaxenaÎncă nu există evaluări
- Microcontrollers and Embedded SystemsDocument35 paginiMicrocontrollers and Embedded SystemsTarek BarhoumÎncă nu există evaluări
- Module 2 ACA NotesDocument31 paginiModule 2 ACA NotesShylaja100% (1)
- VERILOG HDL - Tutorial, PPT FormatDocument30 paginiVERILOG HDL - Tutorial, PPT FormatArslan Kiani100% (2)
- Embedded Coder Getting Started GuideDocument118 paginiEmbedded Coder Getting Started GuideKjfsa TuÎncă nu există evaluări
- Catatan Statisktik FIXDocument59 paginiCatatan Statisktik FIXAndrian WicaksonoÎncă nu există evaluări
- Palasgians, Pre Ancient Greeks..Document14 paginiPalasgians, Pre Ancient Greeks..aemilorÎncă nu există evaluări
- Outline: Optimum Spray Cooling in Continuous Slab Casting Process Under Productivity ImprovementDocument5 paginiOutline: Optimum Spray Cooling in Continuous Slab Casting Process Under Productivity ImprovementKiatkajohn WorapradyaÎncă nu există evaluări
- The Future of Money-Bernard Lietaer PDFDocument382 paginiThe Future of Money-Bernard Lietaer PDFJavier De Ory ArriagaÎncă nu există evaluări
- يَا نَبِي سَلَام عَلَيْكَDocument1 paginăيَا نَبِي سَلَام عَلَيْكَAcengMNasruddinÎncă nu există evaluări
- BullyingDocument9 paginiBullyingTran PhanÎncă nu există evaluări
- Group 4 ASP LivSpaceDocument7 paginiGroup 4 ASP LivSpaceAvi GoyalÎncă nu există evaluări
- Base Course Aggregates StandardsDocument5 paginiBase Course Aggregates Standardsprobook450_ehsanÎncă nu există evaluări
- Illocutionary Acts Expressed Through Sign Language in "Silence Movie"Document74 paginiIllocutionary Acts Expressed Through Sign Language in "Silence Movie"vivianÎncă nu există evaluări
- D9Document88 paginiD9Luis Jesus100% (1)
- Ernest 1989Document22 paginiErnest 1989Alvenz Uswatun Meutia FajriÎncă nu există evaluări
- Unhelpful Thinking Styles - 09 - Emotional ReasoningDocument1 paginăUnhelpful Thinking Styles - 09 - Emotional Reasoningletitia2hintonÎncă nu există evaluări
- 4323Document8 pagini4323KaushikBoseÎncă nu există evaluări
- Identity and Folktale - From The Entertainment To The Existential Illumination: Sacred Communication in Folk TaleDocument14 paginiIdentity and Folktale - From The Entertainment To The Existential Illumination: Sacred Communication in Folk TaleBódis ZoltánÎncă nu există evaluări
- 5 Year Development Plan 1Document10 pagini5 Year Development Plan 1Che Morales100% (2)
- A34198 PDFDocument18 paginiA34198 PDFRobertMaldiniÎncă nu există evaluări
- Select Modifying Data: SQL Cheat Sheet - MysqlDocument3 paginiSelect Modifying Data: SQL Cheat Sheet - MysqlHenrique PeixotoÎncă nu există evaluări
- AndreasenJ Back To The FutureDocument6 paginiAndreasenJ Back To The FutureQilong ZhangÎncă nu există evaluări
- G121 - AY20S2 - CA3 - Student Instructions - 20201117Document4 paginiG121 - AY20S2 - CA3 - Student Instructions - 20201117Lim Liang XuanÎncă nu există evaluări
- Nstp1 Quiz 1 Quiz To Prelim by Jezza Amacalamba 1 CompressDocument12 paginiNstp1 Quiz 1 Quiz To Prelim by Jezza Amacalamba 1 CompressHiro GamerÎncă nu există evaluări
- Analytical Chemistry - Exp 1Document8 paginiAnalytical Chemistry - Exp 1Zharifah Bari'ah Basa'ah100% (1)
- Chem 1 SyllabusDocument10 paginiChem 1 SyllabusJaycee TualaÎncă nu există evaluări
- ReadMe KMSpico PortableDocument4 paginiReadMe KMSpico PortableRez ShahÎncă nu există evaluări
- GREGOR James - Giovanni Gentile and The Philosophy of The Young Karl Marx PDFDocument19 paginiGREGOR James - Giovanni Gentile and The Philosophy of The Young Karl Marx PDFSanti Santillán ZabaljaureguiÎncă nu există evaluări
- Raz lm27 Voyagersinspace CLR PDFDocument9 paginiRaz lm27 Voyagersinspace CLR PDFRachelle Ann MarianoÎncă nu există evaluări
- Astm d2624Document8 paginiAstm d2624mehrez100% (1)
- Toc FRB - TopsideDocument1 paginăToc FRB - TopsidesyaefulÎncă nu există evaluări
- 3 DOE & SQC Basic Workshop Course MaterialDocument18 pagini3 DOE & SQC Basic Workshop Course Materialbuvana1980Încă nu există evaluări
- Cathodic Protection For New Fixed Offshore Steel Structures (AmendmentsSupplements To DNVGL-RP-B401)Document22 paginiCathodic Protection For New Fixed Offshore Steel Structures (AmendmentsSupplements To DNVGL-RP-B401)Abd.Buhari Abd.GalimÎncă nu există evaluări