S-ar putea să vă placă și
- Round Taylor Method Proves Periodic Solution in 3-Body ProblemDocument40 paginiRound Taylor Method Proves Periodic Solution in 3-Body ProblemJohann Suarez MotatoÎncă nu există evaluări
- Motion of A Spinning Symmetric Top: V. TanrıverdiDocument53 paginiMotion of A Spinning Symmetric Top: V. TanrıverditehreemgullgulltehreemÎncă nu există evaluări
- ElastostaticDocument39 paginiElastostaticibrodel22Încă nu există evaluări
- Advancements in Solving Ballistic Equations Involving Quadratic DragDocument21 paginiAdvancements in Solving Ballistic Equations Involving Quadratic DragElliott WallÎncă nu există evaluări
- Conical Singularities and TorsionDocument11 paginiConical Singularities and TorsionNicolas FernandezÎncă nu există evaluări
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsDe la EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsÎncă nu există evaluări
- Research Article: Electromagnetic Gyroscopic MotionDocument15 paginiResearch Article: Electromagnetic Gyroscopic MotionMuhammad Mohsin AslamÎncă nu există evaluări
- Euler Bernoulli 3 DDocument33 paginiEuler Bernoulli 3 DOsmanKatliÎncă nu există evaluări
- Dynamics Lectures 1 & 2Document18 paginiDynamics Lectures 1 & 2Blargher ThergÎncă nu există evaluări
- M8bfadadfbDocument23 paginiM8bfadadfbbhavyajain200569Încă nu există evaluări
- Alain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDocument20 paginiAlain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDopameÎncă nu există evaluări
- Charge Moment Tensor and Magnetic Moment of Rotational Charged BodiesDocument10 paginiCharge Moment Tensor and Magnetic Moment of Rotational Charged BodiesSandip MaityÎncă nu există evaluări
- Experimental Aspects of The Gyroscope's MovementDocument7 paginiExperimental Aspects of The Gyroscope's MovementCassie MinorÎncă nu există evaluări
- GroupTheory VVDocument253 paginiGroupTheory VVHridey GuptaÎncă nu există evaluări
- Rigid Body MotionDocument34 paginiRigid Body MotionSanchit KapoorÎncă nu există evaluări
- Phys 7221 Homework # 8: Derivation 5-6: Torque Free Symmetric TopDocument14 paginiPhys 7221 Homework # 8: Derivation 5-6: Torque Free Symmetric TopPavan KumarÎncă nu există evaluări
- Spaghetti Break - PRLDocument4 paginiSpaghetti Break - PRLswetava_ganguliÎncă nu există evaluări
- NCERT Solutions for Class 11 Physics Chapter 7 System of ParticlesDocument32 paginiNCERT Solutions for Class 11 Physics Chapter 7 System of Particleserfgtrgv vfvvvÎncă nu există evaluări
- Bianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityDocument8 paginiBianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityManuel RodriguesÎncă nu există evaluări
- Lecture L27 - 3D Rigid Body Dynamics: Kinetic Energy Instability Equations of MotionDocument11 paginiLecture L27 - 3D Rigid Body Dynamics: Kinetic Energy Instability Equations of MotionSenya BatchanÎncă nu există evaluări
- S. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthDocument17 paginiS. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthLokosooÎncă nu există evaluări
- A Closed Form Solution of The Two Body Problem in Non-Inertial Reference FramesDocument20 paginiA Closed Form Solution of The Two Body Problem in Non-Inertial Reference Framesshakir hussainÎncă nu există evaluări
- Classical Dynamics: Example Sheet 3Document3 paginiClassical Dynamics: Example Sheet 3Shweta SridharÎncă nu există evaluări
- Analytical and Numerical Solutions of Two Pendulum Models 1Document25 paginiAnalytical and Numerical Solutions of Two Pendulum Models 1SalehÎncă nu există evaluări
- 2D Rigid Body Dynamics Equations of MotionDocument8 pagini2D Rigid Body Dynamics Equations of Motionjehan11Încă nu există evaluări
- Planar Kinetic Equations of Motion: Moment of Inertia Parallel-Axis TheoremDocument61 paginiPlanar Kinetic Equations of Motion: Moment of Inertia Parallel-Axis TheoremEvan Hossein PournejadÎncă nu există evaluări
- A Reexamination of Some Puzzling Results in Linearized ElasticityDocument9 paginiA Reexamination of Some Puzzling Results in Linearized ElasticityAlan BourscheidtÎncă nu există evaluări
- Dynamics - Rigid Body DynamicsDocument20 paginiDynamics - Rigid Body DynamicsFelipe López GarduzaÎncă nu există evaluări
- Stability, Instability, and Bifurcation Phenomena in Non-Autonomous Differential EquationsDocument21 paginiStability, Instability, and Bifurcation Phenomena in Non-Autonomous Differential EquationsvahidÎncă nu există evaluări
- Nonlinear Dynamics of Piecewise Linear OscillatorsDocument16 paginiNonlinear Dynamics of Piecewise Linear OscillatorsivyjeannÎncă nu există evaluări
- MCE312 (Module 1)Document32 paginiMCE312 (Module 1)Muiruri JacobÎncă nu există evaluări
- MEN-351-criticl Speed-Manuscript 20181225Document8 paginiMEN-351-criticl Speed-Manuscript 20181225laura villarroelÎncă nu există evaluări
- Chapter 11 Dynamics of Rigid BodiesDocument29 paginiChapter 11 Dynamics of Rigid Bodiessonuhd1995Încă nu există evaluări
- Rigid BodyDocument9 paginiRigid BodyChernet TugeÎncă nu există evaluări
- Relativity – Problem Sheet 2 solvedDocument4 paginiRelativity – Problem Sheet 2 solvedQingpo WuwuÎncă nu există evaluări
- Batra Continuum-Mech NotesDocument131 paginiBatra Continuum-Mech NotesRitunjay Jha100% (2)
- UG Physics Lecture NotesDocument42 paginiUG Physics Lecture NotesPragalathan V S ee22b039Încă nu există evaluări
- Tube Dislocations in GravityDocument27 paginiTube Dislocations in GravityBayer MitrovicÎncă nu există evaluări
- 3D Rigid Body KinematicsDocument10 pagini3D Rigid Body KinematicsNachiket WadwankarÎncă nu există evaluări
- CM 27 Eulers EquationsDocument5 paginiCM 27 Eulers Equationsosama hasanÎncă nu există evaluări
- ParallelDocument3 paginiParallelnaveedÎncă nu există evaluări
- Lectures On General RelativityDocument63 paginiLectures On General RelativityMichael Anthony MendozaÎncă nu există evaluări
- Lecture L15 - Central Force Motion: Kepler's LawsDocument12 paginiLecture L15 - Central Force Motion: Kepler's Lawsletter_ashish4444Încă nu există evaluări
- Modeling of Rigid MechanismsDocument40 paginiModeling of Rigid Mechanismsscri5159Încă nu există evaluări
- John B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsDocument13 paginiJohn B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsPlamcfeÎncă nu există evaluări
- 767 - Ch5. 1D ThermoelasticityDocument18 pagini767 - Ch5. 1D ThermoelasticityFelipe Carrasco DuránÎncă nu există evaluări
- RotationProject271 M9rehmaDocument10 paginiRotationProject271 M9rehmaabdellatiftifa3333Încă nu există evaluări
- Physics 430: Lecture 24 Euler Equations: Dale E. GaryDocument7 paginiPhysics 430: Lecture 24 Euler Equations: Dale E. GarybeemkumarÎncă nu există evaluări
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyDe la EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyEvaluare: 3 din 5 stele3/5 (2)
- MIT16 07F09 Lec29Document13 paginiMIT16 07F09 Lec29ucing_33Încă nu există evaluări
- RelangmomDocument19 paginiRelangmomLeomar Acosta BallesterosÎncă nu există evaluări
- Rigid Body DynamicsDocument82 paginiRigid Body Dynamicssasi_manjazÎncă nu există evaluări
- Large and Small Deflections of A Cantilever Beam: Tarsicio Beléndez (1), Cristian Neipp (2) and Augusto BeléndezDocument21 paginiLarge and Small Deflections of A Cantilever Beam: Tarsicio Beléndez (1), Cristian Neipp (2) and Augusto BeléndezparagbholeÎncă nu există evaluări
- Alain Goriely and Michael Tabor - New Amplitude Equations For Thin Elastic RodsDocument4 paginiAlain Goriely and Michael Tabor - New Amplitude Equations For Thin Elastic RodsDopameÎncă nu există evaluări
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?De la EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Încă nu există evaluări
- Deformation, Stress, and Conservation Laws: I U U XDocument31 paginiDeformation, Stress, and Conservation Laws: I U U XFelipe Carrasco DuránÎncă nu există evaluări
- Representations of The Symmetry Group of SpacetimeDocument29 paginiRepresentations of The Symmetry Group of SpacetimemarioasensicollantesÎncă nu există evaluări
- Corbera-Llibre Paper On Spatial Isosceles 3BPDocument38 paginiCorbera-Llibre Paper On Spatial Isosceles 3BPJohann Suarez MotatoÎncă nu există evaluări
- Torque_TestDocument25 paginiTorque_TestYodaÎncă nu există evaluări
- Lesson: Quarter 2 - Module: 1: Stem - Gp12Rediia-1 Stem - Gp12Rediia-3Document8 paginiLesson: Quarter 2 - Module: 1: Stem - Gp12Rediia-1 Stem - Gp12Rediia-3Mildred Joy CudpayasÎncă nu există evaluări
- Equations of Motion For An Unmanned Aerial VehicleDocument15 paginiEquations of Motion For An Unmanned Aerial Vehiclekrishnaprasad_rajaseÎncă nu există evaluări
- Moments of Inertia of Different Bodies Steiner's TheoremDocument5 paginiMoments of Inertia of Different Bodies Steiner's TheoremJose GalvanÎncă nu există evaluări
- LECTURE 5 - CAD Transformations and Exercises PDFDocument12 paginiLECTURE 5 - CAD Transformations and Exercises PDFEliane NirereÎncă nu există evaluări
- IntegrationDocument104 paginiIntegrationPratham MalhotraÎncă nu există evaluări
- 11 Rot Motion MCQ PDFDocument2 pagini11 Rot Motion MCQ PDFtanmayÎncă nu există evaluări
- Kinematics of Linkage Mechanisms SolvedDocument16 paginiKinematics of Linkage Mechanisms SolvedEugine BalomagaÎncă nu există evaluări
- Balancing Static, Coupled, and Dynamic - Siemens PLM Community - 385267Document7 paginiBalancing Static, Coupled, and Dynamic - Siemens PLM Community - 385267Vili KamenovaÎncă nu există evaluări
- 2d TransformationDocument6 pagini2d Transformationsurya100% (1)
- GYROSCOPIC INSTRUMENTS SYSTEM: GYROSCOPES AND GIMBALSDocument17 paginiGYROSCOPIC INSTRUMENTS SYSTEM: GYROSCOPES AND GIMBALSashwin pavithranÎncă nu există evaluări
- Exercise - 2 Previous Year Competition QuestionsDocument9 paginiExercise - 2 Previous Year Competition QuestionsChief SomÎncă nu există evaluări
- 2012-1807. Kinematics Robot ManipulatorsDocument39 pagini2012-1807. Kinematics Robot ManipulatorsSiddhartha MishraÎncă nu există evaluări
- Circular MotionDocument13 paginiCircular MotionEsha UwuÎncă nu există evaluări
- Computer Graphics Question BankNewDocument5 paginiComputer Graphics Question BankNewvishaljain263933% (3)
- Uniform Circular MotionDocument10 paginiUniform Circular MotionFredÎncă nu există evaluări
- APPROACHES TO TEACHING TRANSFORMATIONSDocument10 paginiAPPROACHES TO TEACHING TRANSFORMATIONSWyne Bio AgarwoodÎncă nu există evaluări
- Chapter 9: Rotational MotionDocument16 paginiChapter 9: Rotational MotionShubham MalhotraÎncă nu există evaluări
- Rotational Kinematics ExplainedDocument27 paginiRotational Kinematics ExplainedStephen AbadinasÎncă nu există evaluări
- Conservation of angular momentum examplesDocument4 paginiConservation of angular momentum examplesidraumrÎncă nu există evaluări
- Planar Kinematics of a Rigid BodyDocument47 paginiPlanar Kinematics of a Rigid Bodyrana abdul waasay0% (1)
- Mechanical Analysis of Human MotionDocument3 paginiMechanical Analysis of Human MotionLuisa MendozaÎncă nu există evaluări
- Analyze Rigid Body Motion Under Translation and RotationDocument23 paginiAnalyze Rigid Body Motion Under Translation and RotationrajeswariÎncă nu există evaluări
- Rotational MechanicsDocument6 paginiRotational MechanicsHemant KumarÎncă nu există evaluări
- Review Unit 8: Graph The Image of The Figure Using The Transformation GivenDocument5 paginiReview Unit 8: Graph The Image of The Figure Using The Transformation GivenFaith Rappe0% (1)
- Transformations Packet-GraseckDocument33 paginiTransformations Packet-Graseckapi-316517647Încă nu există evaluări
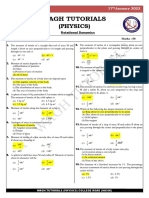
- Mock Test - 98 (17 Jan 2023) Rotational DynamicsDocument1 paginăMock Test - 98 (17 Jan 2023) Rotational DynamicsparamÎncă nu există evaluări
- Finding Equilibrium Using Torque BalancingDocument2 paginiFinding Equilibrium Using Torque Balancingwear itÎncă nu există evaluări
- Rotational Motion and Moment of InertiaDocument14 paginiRotational Motion and Moment of InertiaNayan BeraÎncă nu există evaluări