S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Milne Thomson - Calculus of Finite DifferencesDocument590 paginiMilne Thomson - Calculus of Finite DifferencesmtichyscribdÎncă nu există evaluări
- Teoría Básica de Transformada de Laplace PDFDocument127 paginiTeoría Básica de Transformada de Laplace PDFDoris Giovanna MitreÎncă nu există evaluări
- Biology BooksDocument4 paginiBiology BooksmtichyscribdÎncă nu există evaluări
- Plantillas de Metodos NumericosDocument46 paginiPlantillas de Metodos NumericosXavier XdÎncă nu există evaluări
- S Boyd - Optimizing Dominant Time ConstantsDocument44 paginiS Boyd - Optimizing Dominant Time ConstantsmtichyscribdÎncă nu există evaluări
- Robert Watts - Essentials of Applied MathematicsDocument180 paginiRobert Watts - Essentials of Applied MathematicsmtichyscribdÎncă nu există evaluări
- J Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementDocument4 paginiJ Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementmtichyscribdÎncă nu există evaluări
- WECs Very BasicsDocument5 paginiWECs Very BasicsChristopher TheobaldÎncă nu există evaluări
- Basic Geometry 1 PDFDocument389 paginiBasic Geometry 1 PDFmtichyscribd100% (2)
- Positioning Control MitsubishiDocument74 paginiPositioning Control MitsubishimtichyscribdÎncă nu există evaluări
- Thide - ElectromagnetismoDocument209 paginiThide - ElectromagnetismoFISORGÎncă nu există evaluări
- Hidden Oscillations - Aizerman-Kalman ConjecturesDocument7 paginiHidden Oscillations - Aizerman-Kalman ConjecturesmtichyscribdÎncă nu există evaluări
- Hybrid Control SystemsDocument142 paginiHybrid Control SystemsmtichyscribdÎncă nu există evaluări
- Astrom - Stochastic Control TheoryDocument156 paginiAstrom - Stochastic Control TheorymtichyscribdÎncă nu există evaluări
- Lectures On Controllabiliti and ObservabilityDocument150 paginiLectures On Controllabiliti and ObservabilitymtichyscribdÎncă nu există evaluări
- Real Time Control of Oscillations of Electric Power SystemsDocument29 paginiReal Time Control of Oscillations of Electric Power SystemsmtichyscribdÎncă nu există evaluări
- Introduction To Nonlinear Mechanics - MinorskyDocument490 paginiIntroduction To Nonlinear Mechanics - Minorskymtichyscribd100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Benchmark ProblemsDocument6 paginiBenchmark ProblemsGiri DharanÎncă nu există evaluări
- Thermal Transmission (Winter)Document20 paginiThermal Transmission (Winter)Robin Charles SamuelÎncă nu există evaluări
- Chapter - 08 Switchboard and VSDDocument44 paginiChapter - 08 Switchboard and VSDdewidar1234100% (2)
- Gas Dynamics CourseDocument5 paginiGas Dynamics CourseBalveer CLÎncă nu există evaluări
- Chapter 6 ACKulkarniDocument43 paginiChapter 6 ACKulkarnipurijatinÎncă nu există evaluări
- HW#7 - Statics, Simple Harmonic Motion, Gravitation-PreviewDocument13 paginiHW#7 - Statics, Simple Harmonic Motion, Gravitation-Previewanjali bÎncă nu există evaluări
- Introduction to Special Relativity in 40 CharactersDocument13 paginiIntroduction to Special Relativity in 40 Charactersh_chattaraj6884Încă nu există evaluări
- Ec2305 Transmission Lines & Wave Guides Question BankDocument6 paginiEc2305 Transmission Lines & Wave Guides Question BankharvishÎncă nu există evaluări
- NMR Spectroscopy Integrals and MultiplicityDocument6 paginiNMR Spectroscopy Integrals and MultiplicitysupriyoÎncă nu există evaluări
- 10 Electric CurrentDocument12 pagini10 Electric Currentömer aydınÎncă nu există evaluări
- MIT Arts, Design and Technology University, Rajbaug, Pune - Ordinary Differential Equations and Advanced Calculus Question BankDocument8 paginiMIT Arts, Design and Technology University, Rajbaug, Pune - Ordinary Differential Equations and Advanced Calculus Question BankJohnÎncă nu există evaluări
- Self-Powered Psychotronic GeneratorDocument5 paginiSelf-Powered Psychotronic GeneratorevandrojsilvaÎncă nu există evaluări
- GATE EE/ECCapacitorDocument9 paginiGATE EE/ECCapacitornarendra mauryaÎncă nu există evaluări
- 10 Aberration Theory Part IDocument42 pagini10 Aberration Theory Part IxbÎncă nu există evaluări
- 44-4345CAT SensorsAndEmittersInfraredSensingDocument48 pagini44-4345CAT SensorsAndEmittersInfraredSensingwowbagger02Încă nu există evaluări
- Duct Sizing ChartDocument3 paginiDuct Sizing ChartMonmon DelatorreÎncă nu există evaluări
- Unit-IV - Voli. 2 Polyphase TransformersDocument74 paginiUnit-IV - Voli. 2 Polyphase Transformersvasu_koneti5124Încă nu există evaluări
- Mic Sensitivity and DB ConvertorDocument20 paginiMic Sensitivity and DB ConvertorDebarghya BhattacharyaÎncă nu există evaluări
- QM16 SHOQuestionsDocument10 paginiQM16 SHOQuestionsGaurav YadavÎncă nu există evaluări
- Motion in PlaneDocument1 paginăMotion in Planerina85293Încă nu există evaluări
- Electromagnetism ExperimentsDocument6 paginiElectromagnetism ExperimentsSalmizam IzamÎncă nu există evaluări
- Ncert Solutions Class 11 Physics Chapter 4 Motion in A Plane - 0Document37 paginiNcert Solutions Class 11 Physics Chapter 4 Motion in A Plane - 0RudraÎncă nu există evaluări
- Chemistry 14Document3 paginiChemistry 14BALA GANESHÎncă nu există evaluări
- PYQ Paper - 1&2Document14 paginiPYQ Paper - 1&2Star LodÎncă nu există evaluări
- The Seepage Control of The Tunnel Excavated in High-Pressure Water Condition Using Multiple Times Grouting Method PDFDocument17 paginiThe Seepage Control of The Tunnel Excavated in High-Pressure Water Condition Using Multiple Times Grouting Method PDFMarsheal FisongaÎncă nu există evaluări
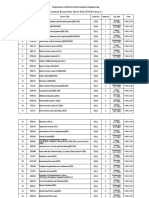
- Terminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringDocument6 paginiTerminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringMuhammad Zaeem AkmalÎncă nu există evaluări
- S.Y. B.SC - PDF - VNSGU 2006-07Document8 paginiS.Y. B.SC - PDF - VNSGU 2006-07drharshalpatel1986Încă nu există evaluări
- Non-Linear Load Power Fact 2 NewwDocument129 paginiNon-Linear Load Power Fact 2 NewwEmraan Khan KhattakÎncă nu există evaluări
- Concrete Electrical ResistivityDocument7 paginiConcrete Electrical Resistivitysoulmateforeverforu100% (1)
- Rohini 46645264742Document5 paginiRohini 46645264742Faheem aktharÎncă nu există evaluări