S-ar putea să vă placă și
- Invariant Manifold Theory for Hydrodynamic TransitionDe la EverandInvariant Manifold Theory for Hydrodynamic TransitionÎncă nu există evaluări
- Progress in Electromagnetics Research M, Vol. 28, 273-287, 2013Document15 paginiProgress in Electromagnetics Research M, Vol. 28, 273-287, 2013Tommy BJÎncă nu există evaluări
- International Journal of Computational Engineering Research (IJCER)Document12 paginiInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Încă nu există evaluări
- Geofisical Fluid Dinam 1d1Document5 paginiGeofisical Fluid Dinam 1d1koalagrisÎncă nu există evaluări
- On The Role of The Jeffreys'sheltering Mechanism in The Sustain of Extreme Water WavesDocument7 paginiOn The Role of The Jeffreys'sheltering Mechanism in The Sustain of Extreme Water WavesAmin EhÎncă nu există evaluări
- Wooding 1969Document23 paginiWooding 1969Deepak Kumar Singh Res. Scholar., Dept. of Mechanical Engg., IIT (BHU)Încă nu există evaluări
- Scullen Tuck 95Document23 paginiScullen Tuck 95Supun RandeniÎncă nu există evaluări
- Pdstrip Documentation PDFDocument45 paginiPdstrip Documentation PDFAnonymous swEs7SEgÎncă nu există evaluări
- Laboratory #3Document13 paginiLaboratory #3JHOANA MELENDREZÎncă nu există evaluări
- Lec30 PDFDocument8 paginiLec30 PDFvikas shelarÎncă nu există evaluări
- Wave-Drift Damping of Floating BodiesDocument19 paginiWave-Drift Damping of Floating Bodiesvarek29Încă nu există evaluări
- Iwwwfb27 16Document4 paginiIwwwfb27 16rickyspaceguyÎncă nu există evaluări
- School On Astrophysical Turbulence and Dynamos: 20 - 30 April 2009Document10 paginiSchool On Astrophysical Turbulence and Dynamos: 20 - 30 April 2009Kishore IyerÎncă nu există evaluări
- Nonlinear Transformation of Waves in FinDocument12 paginiNonlinear Transformation of Waves in Finmfgobbi4515Încă nu există evaluări
- Lampiran Laprak Bandul MatematisDocument24 paginiLampiran Laprak Bandul MatematisVadia Tania AlfarenzaÎncă nu există evaluări
- The Growth of A Cylinder Wake in Turbulent FlowDocument17 paginiThe Growth of A Cylinder Wake in Turbulent FlowJayesh MahajanÎncă nu există evaluări
- Vortex Stretching in Incompressible and Compressible Fluids: Esteban G. Tabak, Fluid Dynamics II, Spring 2002Document10 paginiVortex Stretching in Incompressible and Compressible Fluids: Esteban G. Tabak, Fluid Dynamics II, Spring 2002rahpooye313Încă nu există evaluări
- Solitons IntroDocument8 paginiSolitons Intromexicanu99Încă nu există evaluări
- Small Rigid Floating Bodies Under The Influence of Water WavesDocument13 paginiSmall Rigid Floating Bodies Under The Influence of Water WavesDiyanosh HedayatiÎncă nu există evaluări
- The Continuity Equation: A Seminar Report For Applied MathematicsDocument12 paginiThe Continuity Equation: A Seminar Report For Applied MathematicsFawaz PartoÎncă nu există evaluări
- Lizhen Zhang, Maoyuan E, Shiming Wang, Yongcheng LiangDocument5 paginiLizhen Zhang, Maoyuan E, Shiming Wang, Yongcheng Liangmuhamad otongÎncă nu există evaluări
- Hydrodynamic ForcesDocument13 paginiHydrodynamic ForcesKumarJR86Încă nu există evaluări
- Rogue Wave PDFDocument9 paginiRogue Wave PDFmenguemengueÎncă nu există evaluări
- On The Stability, or Instability, of Certain Fluid MotionDocument16 paginiOn The Stability, or Instability, of Certain Fluid MotionMarie GoeppÎncă nu există evaluări
- Acoustics Field and Active Structural Acoustic Control Modeling in ANSYSDocument16 paginiAcoustics Field and Active Structural Acoustic Control Modeling in ANSYSapi-3869476Încă nu există evaluări
- Particle Dynamics in Centrifbgai FieldsDocument11 paginiParticle Dynamics in Centrifbgai FieldsВалерия КорнееваÎncă nu există evaluări
- Experimental Investigation of The PlungeDocument22 paginiExperimental Investigation of The PlungePrakash Duraisamy CITÎncă nu există evaluări
- Wake EPL V2Document7 paginiWake EPL V2martine.le-berreÎncă nu există evaluări
- L.O. Baksmaty Et Al - Tkachenko Waves in Rapidly Rotating Bose-Einstein CondensatesDocument4 paginiL.O. Baksmaty Et Al - Tkachenko Waves in Rapidly Rotating Bose-Einstein CondensatesPomac232Încă nu există evaluări
- Airy Wave TheoryDocument14 paginiAiry Wave TheoryAnirban Guha50% (2)
- Wave Equation - Wikipedia PDFDocument79 paginiWave Equation - Wikipedia PDFelvianadiyahÎncă nu există evaluări
- Dynamics 1Document8 paginiDynamics 1upamanyu vyasÎncă nu există evaluări
- Fisika UsgDocument39 paginiFisika UsgRirin ELvianaÎncă nu există evaluări
- Breakwater and Revetment Armour StabilityDocument7 paginiBreakwater and Revetment Armour StabilityshrabalarÎncă nu există evaluări
- 1974 ARahman, FHStilllingerDocument11 pagini1974 ARahman, FHStilllingerDaniel ArismendiÎncă nu există evaluări
- L.N. Pyatnitsky - A Concept of TurbulenceDocument8 paginiL.N. Pyatnitsky - A Concept of TurbulenceWhiteLighteÎncă nu există evaluări
- 1304.3126 Hologdraphic SpintronicsDocument9 pagini1304.3126 Hologdraphic SpintronicsJohn H. SmithÎncă nu există evaluări
- J.J.E. Herrera Velázquez Et Al - Instability Suppression by Sheared Flow in Dense Z-Pinch DevicesDocument8 paginiJ.J.E. Herrera Velázquez Et Al - Instability Suppression by Sheared Flow in Dense Z-Pinch DevicesImsaa4Încă nu există evaluări
- Barov 2000 0402Document12 paginiBarov 2000 0402Particle Beam Physics LabÎncă nu există evaluări
- I. Development of The Virial TheoremDocument14 paginiI. Development of The Virial Theoremjohnsmith37758Încă nu există evaluări
- Application of Ergun Equation To Computation of Criticalication of Ergun Equation To Computation of CriticalDocument21 paginiApplication of Ergun Equation To Computation of Criticalication of Ergun Equation To Computation of CriticalNovianto J. SunarnoÎncă nu există evaluări
- 0207 1Document29 pagini0207 1Sveti JeronimÎncă nu există evaluări
- International Journal of Computational Engineering Research (IJCER)Document16 paginiInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Încă nu există evaluări
- H.K. Moffatt - Helicity in Laminar and Turbulent FlowDocument32 paginiH.K. Moffatt - Helicity in Laminar and Turbulent FlowVortices3443Încă nu există evaluări
- Chap. 47 Sound. The Wave Equation: 1. Transverse Wave in Hanging RopeDocument6 paginiChap. 47 Sound. The Wave Equation: 1. Transverse Wave in Hanging RopefudogÎncă nu există evaluări
- Wave EquationDocument13 paginiWave EquationtekellamerZ aka tekellamerÎncă nu există evaluări
- Resistencia Por OlasDocument17 paginiResistencia Por Olasjulianllampi592Încă nu există evaluări
- Basic Fluid Dynamics: Yue-Kin Tsang February 9, 2011Document12 paginiBasic Fluid Dynamics: Yue-Kin Tsang February 9, 2011alulatekÎncă nu există evaluări
- Boundary Conditions in Porous Media: A Variational ApproachDocument6 paginiBoundary Conditions in Porous Media: A Variational ApproachAhmed S. SharifÎncă nu există evaluări
- Energy Loss of A High Charge Bunched Electron Beam in PlasmaDocument13 paginiEnergy Loss of A High Charge Bunched Electron Beam in PlasmaParticle Beam Physics LabÎncă nu există evaluări
- Huerre, Monkewitz - Absolute and Convective Instabilities in Free Shear Layers (1985)Document18 paginiHuerre, Monkewitz - Absolute and Convective Instabilities in Free Shear Layers (1985)Aryce_Încă nu există evaluări
- An Introduction To AeroacousticsDocument64 paginiAn Introduction To Aeroacousticslax_doraÎncă nu există evaluări
- Introduction To Turbulent FlowsDocument8 paginiIntroduction To Turbulent FlowsDoddy CarvalloÎncă nu există evaluări
- Acoustic Wave Equation: Acoustics, LinearDocument20 paginiAcoustic Wave Equation: Acoustics, LinearKasım ÇARBUGAÎncă nu există evaluări
- 2010 Disloc UltrasonicsDocument6 pagini2010 Disloc UltrasonicsMuraleetharan BoopathiÎncă nu există evaluări
- Chapter 2 - The Equations of MotionDocument12 paginiChapter 2 - The Equations of MotionAravind SankarÎncă nu există evaluări
- 1960-Force and Moment Coefficients For Vibrating Aerofoils in CascadeDocument40 pagini1960-Force and Moment Coefficients For Vibrating Aerofoils in Cascadesh1999Încă nu există evaluări
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleDe la EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleÎncă nu există evaluări
- Designing A Keyphasor TriggerDocument8 paginiDesigning A Keyphasor TriggerMahesh JadhavÎncă nu există evaluări
- Aircraft Materials and Processes - 2017 PDFDocument36 paginiAircraft Materials and Processes - 2017 PDFDan Keith Mina DuadÎncă nu există evaluări
- Small Amplitude Soliton Propagation in A Weakly Relativistic Magnetized Space Plasma: Electron Inertia ContributionDocument10 paginiSmall Amplitude Soliton Propagation in A Weakly Relativistic Magnetized Space Plasma: Electron Inertia ContributionSukhmander SinghÎncă nu există evaluări
- Analysis and Design of Column: Chapter ThreeDocument23 paginiAnalysis and Design of Column: Chapter Threejebril yusufÎncă nu există evaluări
- Tensile Fabric Details 3Document1 paginăTensile Fabric Details 3FRANKLYN SPENCERÎncă nu există evaluări
- Piping Design CriteriaDocument20 paginiPiping Design Criteriasuman_ghosh6798Încă nu există evaluări
- DistillationTheory 1Document21 paginiDistillationTheory 1Prashant KumarÎncă nu există evaluări
- Laboratory Study On Pore Pressure Generation and Liquefaction of Low-Plasticity Silty Sandy Soils During The 2012 Earthquake in ItalyDocument10 paginiLaboratory Study On Pore Pressure Generation and Liquefaction of Low-Plasticity Silty Sandy Soils During The 2012 Earthquake in ItalyPinak RayÎncă nu există evaluări
- Colder Catalog 27-30 PMC ConnectorsDocument4 paginiColder Catalog 27-30 PMC ConnectorsDENNIZÎncă nu există evaluări
- CEPL - Company ProfileDocument11 paginiCEPL - Company ProfileKamalÎncă nu există evaluări
- Kruger Tunnel Ventilation Products BrochureDocument12 paginiKruger Tunnel Ventilation Products BrochureMarino AyalaÎncă nu există evaluări
- Impulse and Momentum Problem Set October 21, 2014Document2 paginiImpulse and Momentum Problem Set October 21, 2014Nikko Angelo V MolinaÎncă nu există evaluări
- Physics FormulasDocument108 paginiPhysics FormulasArsalan Ahmed Usmani100% (3)
- 1K 2K Service Manual 4th GenDocument305 pagini1K 2K Service Manual 4th GenElectronica coetc100% (1)
- Ational Etrochemical Efiners Ssociation Treet Uite AshingtonDocument16 paginiAtional Etrochemical Efiners Ssociation Treet Uite AshingtonVijayakumarNarasimhanÎncă nu există evaluări
- Fast Metal Removal SolutionsDocument124 paginiFast Metal Removal SolutionsvrjrÎncă nu există evaluări
- Working Example - RC Shear Walls Design Spreadsheet To Bs8110 - Version 1.0Document5 paginiWorking Example - RC Shear Walls Design Spreadsheet To Bs8110 - Version 1.0alok100% (3)
- Example 3: Concrete Pile, ECH, Tension Stress Check: GRLWEAP Standard ExamplesDocument2 paginiExample 3: Concrete Pile, ECH, Tension Stress Check: GRLWEAP Standard ExamplesbozarromegustaÎncă nu există evaluări
- Fire Sprinkler System GuideDocument2 paginiFire Sprinkler System GuideMike LojoÎncă nu există evaluări
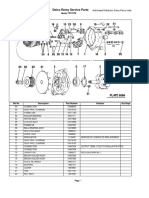
- Delco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaDocument2 paginiDelco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaWilson AcostaÎncă nu există evaluări
- CAPSTONEDocument2 paginiCAPSTONEJustin RoxasÎncă nu există evaluări
- Ultra - Temp Installation and Maintenance Manual IOM 101.2Document16 paginiUltra - Temp Installation and Maintenance Manual IOM 101.2Abdiel Kadir Martinez MendozaÎncă nu există evaluări
- Main Bearing Desing Update Man BWDocument21 paginiMain Bearing Desing Update Man BWarunÎncă nu există evaluări
- Eview Nnovations May 2022 Ce Board Exam RENDON 6 (Hydraulics)Document3 paginiEview Nnovations May 2022 Ce Board Exam RENDON 6 (Hydraulics)Kian InductivoÎncă nu există evaluări
- 18 Appendix C (E)Document14 pagini18 Appendix C (E)Rammiris ManÎncă nu există evaluări
- Black Holes, Singularities and Information Loss - Richard P DolanDocument5 paginiBlack Holes, Singularities and Information Loss - Richard P DolancolordiamondsÎncă nu există evaluări
- XDV Xtra Duty V BeltsDocument3 paginiXDV Xtra Duty V BeltsJohel ClÎncă nu există evaluări
- SOHC Head Flow Data + CarburetorsDocument62 paginiSOHC Head Flow Data + CarburetorsVincenzo SepeÎncă nu există evaluări
- Rr410801 Transport PhenomenaDocument8 paginiRr410801 Transport PhenomenaSrinivasa Rao GÎncă nu există evaluări
- English - ComponentesDocument2 paginiEnglish - ComponentesChristopher Jesus Reàtegui OlivaresÎncă nu există evaluări