S-ar putea să vă placă și
- Perfect Symmetry - The Search For The Beginning of Time - H. PagelsDocument460 paginiPerfect Symmetry - The Search For The Beginning of Time - H. PagelsSubhodeep Sarkar50% (2)
- Ford OBD2 MonitorDocument282 paginiFord OBD2 MonitorAnonymous 4IEjocÎncă nu există evaluări
- C++ BookDocument717 paginiC++ Bookapi-3849105100% (2)
- Information Security PolicyDocument16 paginiInformation Security Policymohammed oumerÎncă nu există evaluări
- Jay ValentineDocument9 paginiJay Valentinechrisdmello17Încă nu există evaluări
- SedimentationDocument8 paginiSedimentationShrutiÎncă nu există evaluări
- Trader Manual PDFDocument121 paginiTrader Manual PDFlorenneth87% (15)
- Nike CaseDocument21 paginiNike CaseAnksÎncă nu există evaluări
- Jbase Locking MecanismeDocument33 paginiJbase Locking MecanismeMamat AdoumaÎncă nu există evaluări
- Operating Instructions For The Shimadzu Uv-2401Pc Uv-Visible SpectrophotometerDocument9 paginiOperating Instructions For The Shimadzu Uv-2401Pc Uv-Visible SpectrophotometerKate AnagnostouÎncă nu există evaluări
- Debugging Simulation Mismatches in Fastscan: by Geir Eide Last Modified: July 03, 2001Document21 paginiDebugging Simulation Mismatches in Fastscan: by Geir Eide Last Modified: July 03, 2001prakashthamankar100% (3)
- General Physics, An Elementary Textbook For Colleges (1908)Document544 paginiGeneral Physics, An Elementary Textbook For Colleges (1908)sellaryÎncă nu există evaluări
- Estimating Velocity of Nailfold Vessels Flow Using Improvised Deconvolution AlgorithmDocument6 paginiEstimating Velocity of Nailfold Vessels Flow Using Improvised Deconvolution AlgorithmIJERDÎncă nu există evaluări
- 2018 38263 Moesm4 EsmDocument18 pagini2018 38263 Moesm4 EsmMaria Perez ZabalzaÎncă nu există evaluări
- Motionlab: A Matlab Toolbox For Extracting and Processing Experimental Motion Capture Data For Neuromuscular SimulationsDocument15 paginiMotionlab: A Matlab Toolbox For Extracting and Processing Experimental Motion Capture Data For Neuromuscular SimulationsDavid BritzmanÎncă nu există evaluări
- BCI Challenge: Error Potential Detection With Cross-Subject GeneralisationDocument5 paginiBCI Challenge: Error Potential Detection With Cross-Subject GeneralisationmeagmohitÎncă nu există evaluări
- Patient Adapted Augmented Reality System For Real-Time Echocardiographic ApplicationsDocument10 paginiPatient Adapted Augmented Reality System For Real-Time Echocardiographic ApplicationsGabriel KissÎncă nu există evaluări
- 193 PaperDocument8 pagini193 PaperacouillaultÎncă nu există evaluări
- A Comparative Study On Adaptive Lifting Based Scheme and Interactive Artificial Bee Colony Algorithm For Image CompressionDocument12 paginiA Comparative Study On Adaptive Lifting Based Scheme and Interactive Artificial Bee Colony Algorithm For Image CompressionIJMAJournalÎncă nu există evaluări
- Blur Parameter Identification Using Support Vector Machine: Ratnakar Dash, Pankaj Kumar Sa, and Banshidhar MajhiDocument4 paginiBlur Parameter Identification Using Support Vector Machine: Ratnakar Dash, Pankaj Kumar Sa, and Banshidhar MajhiidesajithÎncă nu există evaluări
- Testing System Development For Creep Characterization of PolymersDocument6 paginiTesting System Development For Creep Characterization of PolymersJames UgoÎncă nu există evaluări
- 01 Rheology Open Science FinalDocument15 pagini01 Rheology Open Science FinaloyuÎncă nu există evaluări
- Engineering Science Lab Report 2 Question AnalysisDocument3 paginiEngineering Science Lab Report 2 Question AnalysisKiddozesÎncă nu există evaluări
- Results: Figure 1 CRNN Architecture ClassificationDocument5 paginiResults: Figure 1 CRNN Architecture ClassificationAisha ZulifqarÎncă nu există evaluări
- Computer Vision Research StatementDocument5 paginiComputer Vision Research StatementJulio CalvoÎncă nu există evaluări
- Low Cost Motion CaptureDocument5 paginiLow Cost Motion CaptureioscherzoÎncă nu există evaluări
- Metroloj Microscopes FWHMDocument6 paginiMetroloj Microscopes FWHMdhavhi7868Încă nu există evaluări
- Lab 14report-2Document4 paginiLab 14report-2Hamza RehiouiÎncă nu există evaluări
- Technical Contributions To The Quality of Telerehabilitation Platforms Case Study Ephort ProjectDocument23 paginiTechnical Contributions To The Quality of Telerehabilitation Platforms Case Study Ephort ProjectSandra SanchezÎncă nu există evaluări
- Recognition of Polyps in The Images of Wireless Capsule EndosDocument4 paginiRecognition of Polyps in The Images of Wireless Capsule EndosInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Intrinsic Flood-Field Uniformity EvaluationDocument10 paginiIntrinsic Flood-Field Uniformity EvaluationsanyengereÎncă nu există evaluări
- Violajones Ijcv PDFDocument25 paginiViolajones Ijcv PDFFelice ChewÎncă nu există evaluări
- Paper1:: Collaborative Virtual EnvironmentDocument3 paginiPaper1:: Collaborative Virtual EnvironmentTaimoor AslamÎncă nu există evaluări
- Wearable Gait MeasurementDocument4 paginiWearable Gait MeasurementHasballah ZakariaÎncă nu există evaluări
- DEPTH MAPstereo-Pair VideoDocument7 paginiDEPTH MAPstereo-Pair VideoNk OsujiÎncă nu există evaluări
- Object Detection and Shadow Removal From Video StreamDocument10 paginiObject Detection and Shadow Removal From Video StreamPaolo PinoÎncă nu există evaluări
- A Two Step Approach For Whole Slide Image RegistrationDocument3 paginiA Two Step Approach For Whole Slide Image Registrationedfewf3Încă nu există evaluări
- Bachelor Thesis Drucken LassenDocument5 paginiBachelor Thesis Drucken Lassenmelissakulamanchester100% (2)
- Tum BWL Master ThesisDocument8 paginiTum BWL Master Thesischristinavaladeznewyork100% (1)
- Major MidDocument11 paginiMajor MidHritik SinghÎncă nu există evaluări
- 3D Tracking For Gait Characterization and RecognitionDocument6 pagini3D Tracking For Gait Characterization and RecognitionschumangelÎncă nu există evaluări
- Computer Aided Ultrasound Laboratory: Physics, 842Document6 paginiComputer Aided Ultrasound Laboratory: Physics, 842kmchistiÎncă nu există evaluări
- (X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Document10 pagini(X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Hira RasabÎncă nu există evaluări
- Pattern Recognition of Human Gait SignaturesDocument72 paginiPattern Recognition of Human Gait SignaturesHassan OneironautÎncă nu există evaluări
- Image Mosaicing and Real-Time Imaging With Mems Based Handheld Confocal MicroscopeDocument4 paginiImage Mosaicing and Real-Time Imaging With Mems Based Handheld Confocal MicroscopeLuthfan FauzanÎncă nu există evaluări
- Technical Advance Automated Sample Mounting and Alignment System For Biological Crystallography at A Synchrotron SourceDocument9 paginiTechnical Advance Automated Sample Mounting and Alignment System For Biological Crystallography at A Synchrotron Sourceertyuio456788Încă nu există evaluări
- Detection of Anomalous Crowd Behavior Using Spatio Tempora Multiresolution Model and Kronecker Sum DecompositionsDocument10 paginiDetection of Anomalous Crowd Behavior Using Spatio Tempora Multiresolution Model and Kronecker Sum DecompositionsMenejes Palomino NeptalíÎncă nu există evaluări
- Meeting RecognisionDocument4 paginiMeeting RecognisionpeterijÎncă nu există evaluări
- Vibration Shaker Control SystemDocument5 paginiVibration Shaker Control SystemtripathijohnÎncă nu există evaluări
- Design and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemDocument8 paginiDesign and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemInternational Journal of computational Engineering research (IJCER)Încă nu există evaluări
- Applicability of Scaling Laws To Vision Encoding ModelsDocument7 paginiApplicability of Scaling Laws To Vision Encoding ModelsDaniele MarconiÎncă nu există evaluări
- A Fast Image Coding Algorithm Based On Lifting Wavelet TransformDocument4 paginiA Fast Image Coding Algorithm Based On Lifting Wavelet TransformRoshan JayswalÎncă nu există evaluări
- Research On Bank Intelligent Video Image Processing and Monitoring Control System Based On OpenCVDocument4 paginiResearch On Bank Intelligent Video Image Processing and Monitoring Control System Based On OpenCVthangaraj_ic100% (1)
- ReservoirDocument10 paginiReservoirسجاد كريم هاشم سماويÎncă nu există evaluări
- Control of An Omnidirectional Walking SimulatorDocument14 paginiControl of An Omnidirectional Walking SimulatorLONG Trương MinhÎncă nu există evaluări
- MACH PaperDocument8 paginiMACH PaperHaris MasoodÎncă nu există evaluări
- Weiss 11 RealDocument7 paginiWeiss 11 RealVũ Tiến DũngÎncă nu există evaluări
- 3 DOF Gyroscope Courseware Sample For MATLAB UsersDocument8 pagini3 DOF Gyroscope Courseware Sample For MATLAB UsersDragan LazicÎncă nu există evaluări
- Study of Algorithm(s) For EEG Based Brain Computer InterfaceDocument7 paginiStudy of Algorithm(s) For EEG Based Brain Computer InterfaceInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Attitude Determination and Bias Estimation Using Kalman Filtering - YadlinDocument11 paginiAttitude Determination and Bias Estimation Using Kalman Filtering - Yadlingussai33Încă nu există evaluări
- ICORR 2011 Revised v7Document6 paginiICORR 2011 Revised v7Luu Trieu PhatÎncă nu există evaluări
- Silhouette Lookup For Monocular 3D Pose Tracking: Nicholas R. HoweDocument23 paginiSilhouette Lookup For Monocular 3D Pose Tracking: Nicholas R. HoweSudipta GhoshÎncă nu există evaluări
- Human Activity ClassificationDocument6 paginiHuman Activity Classificationnikhil singhÎncă nu există evaluări
- Ensemble Kalman Filter For Multisensor Fusion With Multistep Delayed MeasurementsDocument10 paginiEnsemble Kalman Filter For Multisensor Fusion With Multistep Delayed MeasurementselmerkhÎncă nu există evaluări
- Motion DetectionDocument6 paginiMotion DetectionFredy Calsin CariÎncă nu există evaluări
- Journal Colony Counter PDFDocument6 paginiJournal Colony Counter PDFJeremy GordonÎncă nu există evaluări
- A New Concept for Tuning Design Weights in Survey Sampling: Jackknifing in Theory and PracticeDe la EverandA New Concept for Tuning Design Weights in Survey Sampling: Jackknifing in Theory and PracticeÎncă nu există evaluări
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsDe la EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsÎncă nu există evaluări
- Computer Science C++Document43 paginiComputer Science C++sellaryÎncă nu există evaluări
- The Yule Walker Equations For The AR Coefficients: 1 Direct InversionDocument8 paginiThe Yule Walker Equations For The AR Coefficients: 1 Direct InversionsellaryÎncă nu există evaluări
- Yule-Walker Equations and Moving Average ModelsDocument2 paginiYule-Walker Equations and Moving Average ModelssellaryÎncă nu există evaluări
- Computer Science C++Document39 paginiComputer Science C++sellaryÎncă nu există evaluări
- Chapter 05Document66 paginiChapter 05sellaryÎncă nu există evaluări
- Computer Science C++Document48 paginiComputer Science C++sellaryÎncă nu există evaluări
- Computer Science C++Document43 paginiComputer Science C++sellaryÎncă nu există evaluări
- Chapter 02Document44 paginiChapter 02sellaryÎncă nu există evaluări
- Harvard Apparatus, Model 44 Syringe Pump User ManualDocument56 paginiHarvard Apparatus, Model 44 Syringe Pump User ManualthynameisraymondÎncă nu există evaluări
- MAJOR PROJECT REPORT (Financial Management System)Document46 paginiMAJOR PROJECT REPORT (Financial Management System)Krishna SharmaÎncă nu există evaluări
- Installing-Uninstall Oracle 10g Database SoftwareDocument6 paginiInstalling-Uninstall Oracle 10g Database SoftwareSarath SivanÎncă nu există evaluări
- Entry Behaviour Brief Introduction: ObjectivesDocument7 paginiEntry Behaviour Brief Introduction: ObjectivesSittie Fahieda Aloyodan100% (1)
- MOOSE (Meta-Analyses of Observational Studies in Epidemiology) ChecklistDocument2 paginiMOOSE (Meta-Analyses of Observational Studies in Epidemiology) ChecklistNesru Ahmed AkkichuÎncă nu există evaluări
- Case RCBDocument76 paginiCase RCBSaurabh KatariaÎncă nu există evaluări
- TR01 - Introduction PDFDocument25 paginiTR01 - Introduction PDFRajÎncă nu există evaluări
- Report On Personal SellingDocument11 paginiReport On Personal SellingGirish Harsha100% (5)
- Rachel Freeman's ResumeDocument3 paginiRachel Freeman's Resumerachel_freeman17Încă nu există evaluări
- K725-2016 Course OutlineDocument10 paginiK725-2016 Course Outlinemelissa_infusionÎncă nu există evaluări
- DELL Latitude D420 COMPAL LA-3071P Rev 1.0 SchematicsDocument59 paginiDELL Latitude D420 COMPAL LA-3071P Rev 1.0 SchematicsviniciusvbfÎncă nu există evaluări
- Introduction To MATLABDocument33 paginiIntroduction To MATLABAbebayehu YohannesÎncă nu există evaluări
- Seminar Report On Virtual Laser KeyboardDocument18 paginiSeminar Report On Virtual Laser KeyboardAnimesh71% (7)
- Keithley 182 Quick GuideDocument38 paginiKeithley 182 Quick GuideChih-Wei ChangÎncă nu există evaluări
- ACTIVITY 7 Discussing Online Privacy - AnswersDocument9 paginiACTIVITY 7 Discussing Online Privacy - AnswersAdrian VSÎncă nu există evaluări
- Sag Tension (ACCC Casablanca)Document2 paginiSag Tension (ACCC Casablanca)Subodh SontakkeÎncă nu există evaluări
- Result MBTDocument40 paginiResult MBTAnkush R KrishnaÎncă nu există evaluări
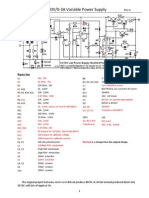
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 paginiModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraÎncă nu există evaluări
- HIN-706 Systems Analysis and Design Syllabus 20150105Document5 paginiHIN-706 Systems Analysis and Design Syllabus 20150105savvy_as_98-1100% (1)
- Agc 150 Designers Handbook 4189341188 UkDocument398 paginiAgc 150 Designers Handbook 4189341188 UkMaicon ZagonelÎncă nu există evaluări
- SVERKER 750/780: Relay Test SetsDocument8 paginiSVERKER 750/780: Relay Test SetshaydarÎncă nu există evaluări
- Cat CDVRDocument8 paginiCat CDVRAdeel AfzalÎncă nu există evaluări
- Ci QBDocument13 paginiCi QBGanesh KumarÎncă nu există evaluări