S-ar putea să vă placă și
- Hybrid Dynamical Systems: Modeling, Stability, and RobustnessDe la EverandHybrid Dynamical Systems: Modeling, Stability, and RobustnessÎncă nu există evaluări
- Kinematic Analysis of 5 Dof Lynx ArmDocument6 paginiKinematic Analysis of 5 Dof Lynx ArmsathyaÎncă nu există evaluări
- D-H Problems PDFDocument9 paginiD-H Problems PDFkrupachariÎncă nu există evaluări
- Module 02 - Robot KinematicsDocument46 paginiModule 02 - Robot KinematicsRisha AnurajÎncă nu există evaluări
- DH Parameters PDFDocument122 paginiDH Parameters PDFyash523Încă nu există evaluări
- Different DH ConventionsDocument20 paginiDifferent DH ConventionsomarÎncă nu există evaluări
- Inverse Kinematics PPT (Pak Toni)Document14 paginiInverse Kinematics PPT (Pak Toni)herawanadifÎncă nu există evaluări
- Direct KinematicsDocument66 paginiDirect KinematicsMateen Qadri100% (2)
- ME427 LEC11 Forward KinameticsDocument15 paginiME427 LEC11 Forward KinameticsSohaib IrfanÎncă nu există evaluări
- Lec8 Inverse KinematicsDocument32 paginiLec8 Inverse KinematicsbalkyderÎncă nu există evaluări
- Lec9 Velocity KinematicsDocument30 paginiLec9 Velocity KinematicsbalkyderÎncă nu există evaluări
- Forward Kinematics: "Finding The End Effector Given The Joint Angles"Document18 paginiForward Kinematics: "Finding The End Effector Given The Joint Angles"Saleem HaddadÎncă nu există evaluări
- Robotics: Dynamic Model of ManipulatorsDocument20 paginiRobotics: Dynamic Model of ManipulatorsbalkyderÎncă nu există evaluări
- Jacobian: Dr. Shady A. MagedDocument44 paginiJacobian: Dr. Shady A. MagedpeterwalidÎncă nu există evaluări
- Chapter 6 1Document26 paginiChapter 6 1Nyein Aye MyatÎncă nu există evaluări
- Denavit Hartenberg ConventionDocument17 paginiDenavit Hartenberg Conventionshobri49Încă nu există evaluări
- Jacobian and Static ForceDocument35 paginiJacobian and Static ForcesivaeeinfoÎncă nu există evaluări
- Jacobian RedDocument42 paginiJacobian RedTan Nguyen VanÎncă nu există evaluări
- Denavit Hartenberg ConventionDocument17 paginiDenavit Hartenberg ConventionRaja RvÎncă nu există evaluări
- Jacobians-Differential KinematicsDocument62 paginiJacobians-Differential KinematicsChay Tick FeiÎncă nu există evaluări
- Robotics CH 4 Robot DynamicsDocument40 paginiRobotics CH 4 Robot DynamicsCharlette Alessi InaoÎncă nu există evaluări
- System Simulation Using Matlab, State Plane PlotsDocument7 paginiSystem Simulation Using Matlab, State Plane PlotsmosictrlÎncă nu există evaluări
- Lec12 ControlDocument19 paginiLec12 ControlbalkyderÎncă nu există evaluări
- Sri Venkateswara College of Engineering Course Delivery Plan - Theory Page 1 of 6Document6 paginiSri Venkateswara College of Engineering Course Delivery Plan - Theory Page 1 of 6Ravinder Reddy SimalaÎncă nu există evaluări
- Robot PDFDocument56 paginiRobot PDFfranklin getialÎncă nu există evaluări
- HW1Document11 paginiHW1Tao Liu YuÎncă nu există evaluări
- Course Material (Students)Document46 paginiCourse Material (Students)Lamjed AouaniÎncă nu există evaluări
- Jeppiaar Engineering College: Question BankDocument15 paginiJeppiaar Engineering College: Question Bankmohanmzcet100% (1)
- Inverse Manipulator KinematicsDocument27 paginiInverse Manipulator KinematicsSyifaul L AhmadÎncă nu există evaluări
- ForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFDocument11 paginiForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFAshar HaroonÎncă nu există evaluări
- Manipulator Kinematics - Example - 3R: MECH 498: Introduction To Robotics Inverse Manipulator Kinematics M. O'MalleyDocument50 paginiManipulator Kinematics - Example - 3R: MECH 498: Introduction To Robotics Inverse Manipulator Kinematics M. O'MalleyRahulGP88% (8)
- Robot Kinematics Powerpoint PDFDocument45 paginiRobot Kinematics Powerpoint PDFkwastekÎncă nu există evaluări
- Manipulator KinematicsDocument61 paginiManipulator KinematicsHoang Minh ThangÎncă nu există evaluări
- Scara RobotDocument13 paginiScara RobotMuhammad Ikhsan Al-fatihÎncă nu există evaluări
- Jacobi AnDocument34 paginiJacobi Anfitri puji rahayuÎncă nu există evaluări
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pagini2012-1811. Robot Arm Kinematics DH IntroRana UsmanÎncă nu există evaluări
- Ur 5Document6 paginiUr 5Isabelle PerfectoÎncă nu există evaluări
- 2 Marks Question & AnswerDocument9 pagini2 Marks Question & AnswerShanmuga PriyaÎncă nu există evaluări
- Forward Kinematics: The Denavit-Hartenberg Convention: 3.1 Kinematic ChainsDocument19 paginiForward Kinematics: The Denavit-Hartenberg Convention: 3.1 Kinematic ChainsKispandu GuptaÎncă nu există evaluări
- DH ParametersDocument18 paginiDH ParameterswasifazimÎncă nu există evaluări
- IAT0922 Industrial Robotics Chapter2 Rev4Document79 paginiIAT0922 Industrial Robotics Chapter2 Rev4visionÎncă nu există evaluări
- Modeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkDocument5 paginiModeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkMario CavazosÎncă nu există evaluări
- Introduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadDocument117 paginiIntroduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadEnGr Asad Hayat BanGashÎncă nu există evaluări
- Introduction To Robot SoccerDocument94 paginiIntroduction To Robot Soccerdek0ne100% (1)
- Robotics PPT ch-1Document29 paginiRobotics PPT ch-1SileshÎncă nu există evaluări
- Ambuj Gupta : I. D. No. 46671 ObjectiveDocument1 paginăAmbuj Gupta : I. D. No. 46671 ObjectiveAmbujÎncă nu există evaluări
- Robotics TeachingPlan BoSE&TC KBCDocument2 paginiRobotics TeachingPlan BoSE&TC KBCvydeo100% (1)
- VHDL Implemenation of Cordic AlgorithmDocument39 paginiVHDL Implemenation of Cordic Algorithm1234sharada50% (2)
- Universal Shift RegisterDocument2 paginiUniversal Shift RegisterAromal RajÎncă nu există evaluări
- Lecture 199 623Document17 paginiLecture 199 623Ravi TejaÎncă nu există evaluări
- Abstract. The Balancing of An Inverted Pendulum byDocument5 paginiAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaÎncă nu există evaluări
- Fuzzy Logic History and ApplicationsDocument5 paginiFuzzy Logic History and ApplicationsYossry AwadÎncă nu există evaluări
- System Identification, Estimation and FilteringDocument34 paginiSystem Identification, Estimation and FilteringDao AnhÎncă nu există evaluări
- Automatic Control ExercisesDocument183 paginiAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- MR Practice Exercises PDFDocument108 paginiMR Practice Exercises PDFRicardo Paschoeto100% (1)
- Rotation and Transformation MatricesDocument56 paginiRotation and Transformation MatricesRam MÎncă nu există evaluări
- Manipulator KinematicsDocument42 paginiManipulator KinematicsKarthikeyanRamanujamÎncă nu există evaluări
- Linkages: 2.1. FOUR - Bar LinkageDocument29 paginiLinkages: 2.1. FOUR - Bar LinkageaddisudagneÎncă nu există evaluări
- Lecture04 5EL158 PDFDocument47 paginiLecture04 5EL158 PDFselvamÎncă nu există evaluări
- Analytical Study On The Cornering Behavior of An Articulated Tracked VehicleDocument1 paginăAnalytical Study On The Cornering Behavior of An Articulated Tracked VehicleiDEvÎncă nu există evaluări
- TR-7551 Wiring & Typical Connection DiagramDocument1 paginăTR-7551 Wiring & Typical Connection Diagramlakshitha sandaruwanÎncă nu există evaluări
- MD Primer ErcolessiDocument52 paginiMD Primer ErcolessiAjinBaby MyladiyilÎncă nu există evaluări
- Presentation On Usb 3.0Document21 paginiPresentation On Usb 3.0Anuj KumarÎncă nu există evaluări
- Materials Engineer Test Reviewer-1Document47 paginiMaterials Engineer Test Reviewer-1Rodrigo Castillo Cacho93% (27)
- LIFIDocument7 paginiLIFIRajeshÎncă nu există evaluări
- Shear StressDocument8 paginiShear StressRommel Carlo LargadoÎncă nu există evaluări
- East West Pipe Rack For Piping Project J-80: Sendan International Company LTDDocument25 paginiEast West Pipe Rack For Piping Project J-80: Sendan International Company LTDFarrukh Javed100% (1)
- Brochure Tialoc Chemical Resistant Piping Systems: Page 1 of 20Document20 paginiBrochure Tialoc Chemical Resistant Piping Systems: Page 1 of 20Fernando Cesar PérezÎncă nu există evaluări
- Apache MyFaces Trinidad - Skin SelectorsDocument25 paginiApache MyFaces Trinidad - Skin SelectorsJorge LavadoÎncă nu există evaluări
- PVsyst Simulation ReportDocument7 paginiPVsyst Simulation ReportRandu Satria PutraÎncă nu există evaluări
- Belden 9463 PDFDocument3 paginiBelden 9463 PDFtr0184Încă nu există evaluări
- Slope Stability Manual 8Document12 paginiSlope Stability Manual 8YawgmothÎncă nu există evaluări
- Assignment Payment 1Document5 paginiAssignment Payment 1Mohamad SafwanÎncă nu există evaluări
- STA505Document10 paginiSTA505kizonzÎncă nu există evaluări
- Combustion TheoryDocument44 paginiCombustion TheoryyaidragonÎncă nu există evaluări
- Junction Box PDFDocument2 paginiJunction Box PDFMohan ShanmugamÎncă nu există evaluări
- Lesson 1 - Section 5.1 - Chemical and Physical ChangeDocument4 paginiLesson 1 - Section 5.1 - Chemical and Physical ChangeshanlbyÎncă nu există evaluări
- C32 MCS 3 DisplayDocument49 paginiC32 MCS 3 Displayharikrishnanpd3327Încă nu există evaluări
- Rule: Airworthiness Directives: ATR Model ATR42-500 AirplanesDocument2 paginiRule: Airworthiness Directives: ATR Model ATR42-500 AirplanesJustia.comÎncă nu există evaluări
- Introductory Fluid Mechanics Taught Using A Carbur PDFDocument2 paginiIntroductory Fluid Mechanics Taught Using A Carbur PDFUsman Ali Usman AliÎncă nu există evaluări
- Basic Yagi Antenna Design For The ExperimenterDocument9 paginiBasic Yagi Antenna Design For The ExperimenterKrista JacksonÎncă nu există evaluări
- Alfonso, Michael John Agaser 202005047MN0 Bachelor of Science in Electrical Engineering Enrolled SubjectsDocument1 paginăAlfonso, Michael John Agaser 202005047MN0 Bachelor of Science in Electrical Engineering Enrolled SubjectsMJA.AlfonsoÎncă nu există evaluări
- Leeson Speedmaster ManualDocument80 paginiLeeson Speedmaster ManualOrbán Árpád100% (1)
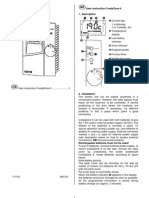
- Credazone 6 GiudeDocument3 paginiCredazone 6 Giudeguddu84Încă nu există evaluări
- Multiple-Unit Material Balances I: Cheme 101 - 6.4 Worksheet 1 Semester Ay 2020-2021 Department of Chemical EngineeringDocument6 paginiMultiple-Unit Material Balances I: Cheme 101 - 6.4 Worksheet 1 Semester Ay 2020-2021 Department of Chemical EngineeringAcademicBMÎncă nu există evaluări
- Platespin User GuideDocument17 paginiPlatespin User GuideEbitomo Anthony TobiÎncă nu există evaluări
- A Project Report On Financial Performance Evaluation With Key Ratios at Vasavadatta Cement Kesoram Industries LTD Sedam Gulbarga PDFDocument82 paginiA Project Report On Financial Performance Evaluation With Key Ratios at Vasavadatta Cement Kesoram Industries LTD Sedam Gulbarga PDFK Sagar Kondolla100% (1)
- Astm A722 PDFDocument5 paginiAstm A722 PDFNguyễn ThạnhÎncă nu există evaluări
- MS301L11 Navigational Methods and Route Planning LADocument3 paginiMS301L11 Navigational Methods and Route Planning LASam HollidayÎncă nu există evaluări