S-ar putea să vă placă și
- SupportServices MotorsDocument92 paginiSupportServices MotorsCarlosÎncă nu există evaluări
- JS2807 Instruction ManualDocument11 paginiJS2807 Instruction ManualAgustin CruzÎncă nu există evaluări
- YL620-A Setup TableDocument8 paginiYL620-A Setup TableJuan Gomez100% (1)
- Stepper Motor Speed ProfileDocument5 paginiStepper Motor Speed ProfileCharoensak Charayaphan100% (1)
- CW5045Document5 paginiCW5045raindancer5432Încă nu există evaluări
- KBCC-255 DC Drive ManualDocument16 paginiKBCC-255 DC Drive ManualKBElectronicsincÎncă nu există evaluări
- Olxe PDFDocument19 paginiOlxe PDFJohn GarnetÎncă nu există evaluări
- Codigos SMD Diodos Placa PlasmaDocument5 paginiCodigos SMD Diodos Placa PlasmaLeandro RoldanÎncă nu există evaluări
- Manual de Isntalacion UV GEWDocument71 paginiManual de Isntalacion UV GEWLuis Fernando SabogalÎncă nu există evaluări
- CNC Operation Edm ELEKTORDAManualDocument117 paginiCNC Operation Edm ELEKTORDAManualAjdinÎncă nu există evaluări
- Users Guide ProH Rev5.0.2 101208 PDFDocument40 paginiUsers Guide ProH Rev5.0.2 101208 PDFHoracio BacasÎncă nu există evaluări
- Load Cell Off Center Load Error Adjustment Guide2Document13 paginiLoad Cell Off Center Load Error Adjustment Guide2Muhamad BadarÎncă nu există evaluări
- SupportServices Motors PDFDocument92 paginiSupportServices Motors PDFMarKusELNÎncă nu există evaluări
- ReVox A77 Serv Man CompleteDocument114 paginiReVox A77 Serv Man CompleteCristian CotetÎncă nu există evaluări
- Ad Man Afe HW SW en 8000001213 CDocument208 paginiAd Man Afe HW SW en 8000001213 CMohamed AlkharashyÎncă nu există evaluări
- Manual Ohaus AdventurerDocument24 paginiManual Ohaus AdventurerCasey AlvaradoÎncă nu există evaluări
- TF5420 TC3 Motion Pick-And-Place enDocument139 paginiTF5420 TC3 Motion Pick-And-Place enKenneth Thoft AndersenÎncă nu există evaluări
- Dixell xr20cDocument4 paginiDixell xr20crandy_raymarkÎncă nu există evaluări
- Banner QS30LDQ Datasheet PDFDocument12 paginiBanner QS30LDQ Datasheet PDFSanket IchakeÎncă nu există evaluări
- Digipro - User Manual Rev2.0Document5 paginiDigipro - User Manual Rev2.0uzarusÎncă nu există evaluări
- Catálogo Bombas KSB PDFDocument142 paginiCatálogo Bombas KSB PDFYerco David Marin Quidequeo0% (1)
- 2011 Bos6000 - V1 - 36 - 0 - PSI201 - EN - 11 - 02 - 18Document122 pagini2011 Bos6000 - V1 - 36 - 0 - PSI201 - EN - 11 - 02 - 18GermainJCR100% (2)
- Deh 1350 MPDocument71 paginiDeh 1350 MPHector100% (1)
- PDFDocument2 paginiPDFFlorian LeordeanuÎncă nu există evaluări
- Iko BearingDocument16 paginiIko BearingSandhya SankarÎncă nu există evaluări
- BOSCH Preferred Products CatalogDocument33 paginiBOSCH Preferred Products CatalogJamin SmtpngÎncă nu există evaluări
- BKDC Traducido Doc v2Document88 paginiBKDC Traducido Doc v2HerberPeraza100% (1)
- Energy 400Document58 paginiEnergy 400fv740% (1)
- ELKON Mobil Betonkevero 2 HungaryDocument2 paginiELKON Mobil Betonkevero 2 Hungaryzyz777Încă nu există evaluări
- Accuset 1000 User ManualDocument2 paginiAccuset 1000 User ManualNabi Diassé TangaraÎncă nu există evaluări
- Minarc 150,151 Service ManualDocument27 paginiMinarc 150,151 Service ManualSimpalean NicolaeÎncă nu există evaluări
- Mps MPS-PR PDFDocument6 paginiMps MPS-PR PDFDimitry TIRAÎncă nu există evaluări
- Duplomatic: SeriesDocument36 paginiDuplomatic: SeriesMuhammad ShayanÎncă nu există evaluări
- The Lord of The Rings - The Battle For Middle-Earth II - Manual - PC PDFDocument34 paginiThe Lord of The Rings - The Battle For Middle-Earth II - Manual - PC PDFGiovanni BataginÎncă nu există evaluări
- Antena 870-950 MHZ HBC RadiomaticDocument2 paginiAntena 870-950 MHZ HBC RadiomaticAlejandro100% (1)
- Zig cf8Document12 paginiZig cf8static_fluxÎncă nu există evaluări
- Planetary Gear For Mounting To AC MotorDocument48 paginiPlanetary Gear For Mounting To AC MotorPrabish KumarÎncă nu există evaluări
- Ho Shing Servo Motor PresentationDocument28 paginiHo Shing Servo Motor PresentationheribertosfaÎncă nu există evaluări
- Kohler 101Document4 paginiKohler 101MGRilloÎncă nu există evaluări
- Difference Between Micromaster 411, 420, 430 & 440Document2 paginiDifference Between Micromaster 411, 420, 430 & 440Edson Leandro100% (1)
- 3300/55 Dual Velocity Monitor: Operation ManualDocument22 pagini3300/55 Dual Velocity Monitor: Operation ManualNishanth KallingentavidaÎncă nu există evaluări
- Product Catalogue: Page Summary TableDocument22 paginiProduct Catalogue: Page Summary TableJhon ConnorÎncă nu există evaluări
- HM 355S ManualDocument59 paginiHM 355S ManualnicnicnicÎncă nu există evaluări
- Braiding DouglassDocument74 paginiBraiding Douglassharichaitanyadas50% (2)
- Rubycon CapacitorDocument4 paginiRubycon CapacitorAlan HoÎncă nu există evaluări
- Lubricant Grease and Sealant Tables For Haas Machine ComponentsDocument12 paginiLubricant Grease and Sealant Tables For Haas Machine ComponentsMarlon GeronimoÎncă nu există evaluări
- CI200 Service Manual (ENG)Document64 paginiCI200 Service Manual (ENG)Alejandro Barnechea (EXACTA)Încă nu există evaluări
- Omron PLC and Redlion HmiDocument29 paginiOmron PLC and Redlion HmiMuhammad Sajid Nasir 27Încă nu există evaluări
- Features: 1.25 A Sensitive Gate SCRDocument11 paginiFeatures: 1.25 A Sensitive Gate SCRMgc ElektronikÎncă nu există evaluări
- M O R S E 5 X 6 Jaw Crusher ManualDocument7 paginiM O R S E 5 X 6 Jaw Crusher ManualGilberto Garnica MurilloÎncă nu există evaluări
- Industrial Motor ControlDocument12 paginiIndustrial Motor Controlganesh madhav kendreÎncă nu există evaluări
- ID 610C Carver Intro To Motor ControlDocument46 paginiID 610C Carver Intro To Motor Control조용규Încă nu există evaluări
- Minor Project Report: Submitted byDocument20 paginiMinor Project Report: Submitted byDurgesh ShuklaÎncă nu există evaluări
- Block Diagram: Body of RobotDocument11 paginiBlock Diagram: Body of RobotAbraham Rohith RoyÎncă nu există evaluări
- Stepper Motor Control Through RF LinkDocument12 paginiStepper Motor Control Through RF Linkmrx1061100% (1)
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDocument21 paginiMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonÎncă nu există evaluări
- Angular Accuracy Back EMFDocument8 paginiAngular Accuracy Back EMFSoudamini HansdahÎncă nu există evaluări
- Electronics Hub: Projects - Tutorials - Courses - KitsDocument13 paginiElectronics Hub: Projects - Tutorials - Courses - KitsanujÎncă nu există evaluări
- ESC TerminologyDocument7 paginiESC Terminologyapi-26045568Încă nu există evaluări
- Numerical RelaysDocument38 paginiNumerical Relaysashutosh2009Încă nu există evaluări
- Weigh Bridge Truck Out Finding ReportDocument6 paginiWeigh Bridge Truck Out Finding Reportbee398Încă nu există evaluări
- Kim Et Al 2021 Carbon Based Quantum Dots For Photovoltaic Devices A ReviewDocument32 paginiKim Et Al 2021 Carbon Based Quantum Dots For Photovoltaic Devices A ReviewTuhinÎncă nu există evaluări
- Get Stronger SQL Server Performance For Less With Dell EMC PowerEdge R6515 Clusters Powered by AMD EPYC 7502P Processors - SummaryDocument2 paginiGet Stronger SQL Server Performance For Less With Dell EMC PowerEdge R6515 Clusters Powered by AMD EPYC 7502P Processors - SummaryPrincipled TechnologiesÎncă nu există evaluări
- JSON Data Modeling: Matthew D. Groves, @mgrovesDocument56 paginiJSON Data Modeling: Matthew D. Groves, @mgrovesGorzilloÎncă nu există evaluări
- House Guide TemplateDocument8 paginiHouse Guide TemplatewandolyÎncă nu există evaluări
- Predatory JournalsDocument9 paginiPredatory JournalsNabeel MuhammadÎncă nu există evaluări
- Migration ToolkitDocument124 paginiMigration Toolkitdaruwin cristianÎncă nu există evaluări
- Types of MicsDocument14 paginiTypes of Micsapi-462777064Încă nu există evaluări
- Bess 1Document180 paginiBess 1dan_geplÎncă nu există evaluări
- Javascript CourseworkDocument6 paginiJavascript Courseworkafjzcgeoylbkku100% (2)
- Activity 6 - Two Station Motor Control With Emergency Stop (Non-Reversing)Document15 paginiActivity 6 - Two Station Motor Control With Emergency Stop (Non-Reversing)AJ LunaÎncă nu există evaluări
- Quotation: Radius Transponders For Petroleum Marine Service CoDocument14 paginiQuotation: Radius Transponders For Petroleum Marine Service CoMohamed MohamedÎncă nu există evaluări
- Interface AplicadorDocument8 paginiInterface AplicadorNelson RibeiroÎncă nu există evaluări
- Specsheet 3516 1825 kVA PrimeDocument6 paginiSpecsheet 3516 1825 kVA PrimeYusman EkaÎncă nu există evaluări
- Passive Optical Network of Company ECIDocument39 paginiPassive Optical Network of Company ECIKundan VanamaÎncă nu există evaluări
- Starting and Stopping Procdure of GeneratorDocument3 paginiStarting and Stopping Procdure of GeneratorSumit SinhaÎncă nu există evaluări
- ClassiCool MSP - English - Summary - EOSDocument16 paginiClassiCool MSP - English - Summary - EOSMohammed KandeelÎncă nu există evaluări
- Rascal07setupusb KitDocument9 paginiRascal07setupusb KitIndra GunawanÎncă nu există evaluări
- Surveying IIIDocument7 paginiSurveying IIIShaik Jhoir100% (1)
- ISAA HoA4 (Unit-5)Document10 paginiISAA HoA4 (Unit-5)052 Deepak NaralaÎncă nu există evaluări
- Agnes CVDocument3 paginiAgnes CVMaziwa ProÎncă nu există evaluări
- 7 Reasons Why Tesla Has Succeeded Where Others Have FailedDocument3 pagini7 Reasons Why Tesla Has Succeeded Where Others Have FailedPuri PuspitaÎncă nu există evaluări
- MAcro ResumeDocument5 paginiMAcro ResumehumayunÎncă nu există evaluări
- XenServer Powershell CommandsDocument1 paginăXenServer Powershell CommandsdealahzÎncă nu există evaluări
- Samson 3277Document17 paginiSamson 3277Anonymous 50FYYM2Încă nu există evaluări
- Huawei SE1000 Series Enterprise SBC Data SheetDocument4 paginiHuawei SE1000 Series Enterprise SBC Data Sheetarranguezjr5991Încă nu există evaluări
- Chapter 5Document21 paginiChapter 5Yoomif TubeÎncă nu există evaluări
- Data Sheet mbr320 PDFDocument2 paginiData Sheet mbr320 PDFthanggimme.phanÎncă nu există evaluări
- English For Trade FairsDocument3 paginiEnglish For Trade FairsbeataÎncă nu există evaluări
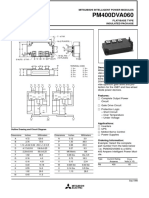
- PM400DVA060: Mitsubishi Intelligent Power ModulesDocument6 paginiPM400DVA060: Mitsubishi Intelligent Power ModulesDiego GrisalesÎncă nu există evaluări
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDe la EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosEvaluare: 5 din 5 stele5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe la EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionEvaluare: 4.5 din 5 stele4.5/5 (543)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...De la EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Încă nu există evaluări
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDe la EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonEvaluare: 5 din 5 stele5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDe la Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersEvaluare: 5 din 5 stele5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDe la EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tEvaluare: 4.5 din 5 stele4.5/5 (27)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsDe la EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsÎncă nu există evaluări
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldDe la EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldEvaluare: 4 din 5 stele4/5 (87)
- Power System Control and ProtectionDe la EverandPower System Control and ProtectionB. Don RussellEvaluare: 4 din 5 stele4/5 (11)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDe la EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeEvaluare: 4.5 din 5 stele4.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDe la EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialEvaluare: 3.5 din 5 stele3.5/5 (3)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDe la EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesEvaluare: 5 din 5 stele5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)De la EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Evaluare: 4 din 5 stele4/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe la EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionEvaluare: 4 din 5 stele4/5 (331)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDe la EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsEvaluare: 3.5 din 5 stele3.5/5 (2)
- Teach Yourself Electricity and Electronics, 6th EditionDe la EverandTeach Yourself Electricity and Electronics, 6th EditionEvaluare: 3.5 din 5 stele3.5/5 (15)
- Build Your Own Electronics WorkshopDe la EverandBuild Your Own Electronics WorkshopEvaluare: 3.5 din 5 stele3.5/5 (3)
- Power Electronics Diploma Interview Q&A: Career GuideDe la EverandPower Electronics Diploma Interview Q&A: Career GuideÎncă nu există evaluări