S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Advantest r6441 DMM User ManualDocument263 paginiAdvantest r6441 DMM User Manualhieuhuech1Încă nu există evaluări
- Lem Voltage 100-500Document2 paginiLem Voltage 100-500hieuhuech1Încă nu există evaluări
- Real-Time Interface Dspace DSDocument12 paginiReal-Time Interface Dspace DShieuhuech1Încă nu există evaluări
- TDS7000 SeriesDocument254 paginiTDS7000 Serieshieuhuech1Încă nu există evaluări
- 2SP0115T Control IGBT ManualDocument21 pagini2SP0115T Control IGBT Manualhieuhuech1Încă nu există evaluări
- Simulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining ScraperDocument11 paginiSimulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining Scraperhieuhuech1Încă nu există evaluări
- Sanwa pc500Document42 paginiSanwa pc500hieuhuech1Încă nu există evaluări
- Tektronix A6303 070390504Document34 paginiTektronix A6303 070390504hieuhuech1Încă nu există evaluări
- Msp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad LedsDocument16 paginiMsp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad Ledshieuhuech1Încă nu există evaluări
- Stator Flux and Speed - HADocument6 paginiStator Flux and Speed - HAhieuhuech1Încă nu există evaluări
- Nonlinear Model of Permanent-Magnet Synchronous MotorsDocument8 paginiNonlinear Model of Permanent-Magnet Synchronous Motorshieuhuech1Încă nu există evaluări
- Design of A Microcontroller-Based Circuit For Software ProtectionDocument6 paginiDesign of A Microcontroller-Based Circuit For Software Protectionhieuhuech1Încă nu există evaluări
- Fod8316 108263Document30 paginiFod8316 108263hieuhuech1Încă nu există evaluări
- Ansys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive SystemDocument25 paginiAnsys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive Systemhieuhuech1Încă nu există evaluări
- Sensorless Foc of PMSM Chu YDocument42 paginiSensorless Foc of PMSM Chu Yhieuhuech1Încă nu există evaluări
- Speed Control Design of A PMSM Based On Functional Model Predictive ApproachDocument15 paginiSpeed Control Design of A PMSM Based On Functional Model Predictive Approachhieuhuech1Încă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 2014 Techkon Price ListDocument13 pagini2014 Techkon Price ListMario Norman B. CelerianÎncă nu există evaluări
- How To Utilize Autocad in Geometry Modeling in Midas CiviDocument8 paginiHow To Utilize Autocad in Geometry Modeling in Midas CiviYaselaÎncă nu există evaluări
- Mitsubishi Evo VIII ECU Connections: View On Wire SideDocument1 paginăMitsubishi Evo VIII ECU Connections: View On Wire SideAhmad AzharÎncă nu există evaluări
- Cumulus Networks Linux Commands Virtualization Cheat Sheet 2019 01.2Document1 paginăCumulus Networks Linux Commands Virtualization Cheat Sheet 2019 01.2jaimealcarriaÎncă nu există evaluări
- tr-8s CheatsheetDocument4 paginitr-8s CheatsheetJesús Miguel de la Morena PeinadoÎncă nu există evaluări
- Global Water 2007 Instrumentation Handbook PDFDocument204 paginiGlobal Water 2007 Instrumentation Handbook PDFsenthil031277Încă nu există evaluări
- Program Evaluation Documents (Table 1 To 16)Document14 paginiProgram Evaluation Documents (Table 1 To 16)Cristina CarpioÎncă nu există evaluări
- Fully Automated Attendance SystemDocument30 paginiFully Automated Attendance SystemManikyam HemalathaÎncă nu există evaluări
- Account StatementDocument5 paginiAccount Statementmuhammadasghar03454345601Încă nu există evaluări
- TME Company Profile 2022Document52 paginiTME Company Profile 2022indraÎncă nu există evaluări
- Journal Paper On Braking SystemDocument9 paginiJournal Paper On Braking SystemRaj kumar SenÎncă nu există evaluări
- iDR-0 Service Manual AP7233 - 1Document9 paginiiDR-0 Service Manual AP7233 - 1zikelabsÎncă nu există evaluări
- Java Lab ManualDocument61 paginiJava Lab ManualManas TripathyÎncă nu există evaluări
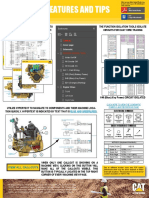
- Esquema Eletrico Cat 312 (Esc055) Uenr54220001Document18 paginiEsquema Eletrico Cat 312 (Esc055) Uenr54220001JOAO BATISTA DA SILVA BatistaÎncă nu există evaluări
- Side Scan Drivers: Interfacing NotesDocument33 paginiSide Scan Drivers: Interfacing NotesOCEANO ManÎncă nu există evaluări
- ISO27k Standards Listing PDFDocument7 paginiISO27k Standards Listing PDFmamunurrahmanÎncă nu există evaluări
- Symbol Table Symbol Table:: Possible Implementations TechniquesDocument7 paginiSymbol Table Symbol Table:: Possible Implementations TechniquesMilad AkbariÎncă nu există evaluări
- Used Car Inspection ChecklistDocument2 paginiUsed Car Inspection ChecklistRavi SarkarÎncă nu există evaluări
- Integrated Modular Avionics ImaDocument4 paginiIntegrated Modular Avionics ImaZhang GuoquanÎncă nu există evaluări
- TMS320 C 50Document774 paginiTMS320 C 50tnj_dineshÎncă nu există evaluări
- Lg02/Olg02 Lora Gateway User Manual: Document Version: 1.6.1Document64 paginiLg02/Olg02 Lora Gateway User Manual: Document Version: 1.6.1121234 datajktÎncă nu există evaluări
- Investigatory ProjectDocument3 paginiInvestigatory ProjectJenny Eyen Nicole0% (1)
- The Role of Engineers in CommunityDocument3 paginiThe Role of Engineers in CommunityEeboon CheahÎncă nu există evaluări
- Itu-T: Test Methods For Installed Single-Mode Optical Fibre Cable LinksDocument34 paginiItu-T: Test Methods For Installed Single-Mode Optical Fibre Cable LinksJose ValenzuelaÎncă nu există evaluări
- NDG Online NDG Linux Essentials Challenge B: Bash ScriptingDocument5 paginiNDG Online NDG Linux Essentials Challenge B: Bash ScriptingOmar OughzalÎncă nu există evaluări
- VerificationDocument49 paginiVerificationMatt ThompsonÎncă nu există evaluări
- Analysis of @darealbubu - Whotwi Graphical Twitter AnalysisDocument1 paginăAnalysis of @darealbubu - Whotwi Graphical Twitter Analysisdeer muÎncă nu există evaluări
- Capstone Project Proposal COMP 10076 Capstone Prep: ApprovedDocument7 paginiCapstone Project Proposal COMP 10076 Capstone Prep: ApprovedJohanthan SputkaovÎncă nu există evaluări
- 3900 Huawei O&M+Manual+-3GDocument21 pagini3900 Huawei O&M+Manual+-3GYasir IqbalÎncă nu există evaluări
- Modbus/TCP Client Support: Additional Important Product Information For Release 3.83Document11 paginiModbus/TCP Client Support: Additional Important Product Information For Release 3.83Sudipto MajumderÎncă nu există evaluări