S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Validation Master PlanDocument27 paginiValidation Master PlanPrashansa Shrestha85% (13)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- ECCO A/S Case Study: Global Value Chain ManagementDocument1 paginăECCO A/S Case Study: Global Value Chain ManagementJay AdrianÎncă nu există evaluări
- Congruence Model PDFDocument16 paginiCongruence Model PDFAndré Amaro100% (2)
- Nicholas Shaxson's Treasure Island - Statistics and InfographicsDocument29 paginiNicholas Shaxson's Treasure Island - Statistics and InfographicsOccult Underground100% (2)
- Nicholas Shaxson's Treasure Island - Statistics and InfographicsDocument29 paginiNicholas Shaxson's Treasure Island - Statistics and InfographicsOccult Underground100% (2)
- Excel Formula For CADocument61 paginiExcel Formula For CArameshritikaÎncă nu există evaluări
- South Korean CultureDocument7 paginiSouth Korean CultureJay AdrianÎncă nu există evaluări
- Corporate Strategy Evolution from Core Competence to ComplexityDocument36 paginiCorporate Strategy Evolution from Core Competence to ComplexityJay AdrianÎncă nu există evaluări
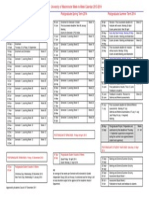
- Postgraduate Academic Year Dates 2013 2014Document1 paginăPostgraduate Academic Year Dates 2013 2014Jay AdrianÎncă nu există evaluări
- Excel Formula For CADocument61 paginiExcel Formula For CArameshritikaÎncă nu există evaluări
- Cost Accumulation MethodsDocument3 paginiCost Accumulation MethodsJay AdrianÎncă nu există evaluări
- Balanced Scorecard: Robert S. KaplanDocument26 paginiBalanced Scorecard: Robert S. KaplanJay Adrian50% (2)
- Balanced SCDocument12 paginiBalanced SCJay AdrianÎncă nu există evaluări
- Figure 1.2: The Balanced Scorecard Framework: To Succeed Financially, How Should We Appear To Our Shareholders?"Document3 paginiFigure 1.2: The Balanced Scorecard Framework: To Succeed Financially, How Should We Appear To Our Shareholders?"Jay AdrianÎncă nu există evaluări
- The Congruence ModelDocument10 paginiThe Congruence ModelJay AdrianÎncă nu există evaluări
- Perspectives On StrategyDocument27 paginiPerspectives On StrategyJay AdrianÎncă nu există evaluări
- HankookDocument7 paginiHankookJay AdrianÎncă nu există evaluări
- SANYODocument20 paginiSANYOJay AdrianÎncă nu există evaluări
- Project Binder 2Document23 paginiProject Binder 2Singh DhirendraÎncă nu există evaluări
- TILE QUOTEDocument3 paginiTILE QUOTEHarsh SathvaraÎncă nu există evaluări
- A6 2018 D Validation Qualification Appendix6 QAS16 673rev1 22022018Document12 paginiA6 2018 D Validation Qualification Appendix6 QAS16 673rev1 22022018Oula HatahetÎncă nu există evaluări
- STS Chapter 1 ReviewerDocument4 paginiSTS Chapter 1 ReviewerEunice AdagioÎncă nu există evaluări
- 12 Week Heavy Slow Resistance Progression For Patellar TendinopathyDocument4 pagini12 Week Heavy Slow Resistance Progression For Patellar TendinopathyHenrique Luís de CarvalhoÎncă nu există evaluări
- Space DynamicsDocument37 paginiSpace Dynamicspurushottam KashyapÎncă nu există evaluări
- Traffic Violation Monitoring with RFIDDocument59 paginiTraffic Violation Monitoring with RFIDShrëyãs NàtrájÎncă nu există evaluări
- PC3 The Sea PeopleDocument100 paginiPC3 The Sea PeoplePJ100% (4)
- BMW Motronic CodesDocument6 paginiBMW Motronic CodesxLibelle100% (3)
- Progibb LV Plus PGR - Low Voc FormulationDocument2 paginiProgibb LV Plus PGR - Low Voc FormulationDodik Novie PurwantoÎncă nu există evaluări
- Air Arms S400 EXPDocument3 paginiAir Arms S400 EXPapi-3695814Încă nu există evaluări
- Philippines' Legal Basis for Claims in South China SeaDocument38 paginiPhilippines' Legal Basis for Claims in South China SeaGeeÎncă nu există evaluări
- Feline DermatologyDocument55 paginiFeline DermatologySilviuÎncă nu există evaluări
- Is.4162.1.1985 Graduated PipettesDocument23 paginiIs.4162.1.1985 Graduated PipettesBala MuruÎncă nu există evaluări
- DENSO COMMON RAIL INJECTOR REPAIR GUIDEDocument22 paginiDENSO COMMON RAIL INJECTOR REPAIR GUIDEMarcoÎncă nu există evaluări
- Chapter 10 AP GP PDFDocument3 paginiChapter 10 AP GP PDFGeorge ChooÎncă nu există evaluări
- SB Z Audio2Document2 paginiSB Z Audio2api-151773256Încă nu există evaluări
- CG Module 1 NotesDocument64 paginiCG Module 1 Notesmanjot singhÎncă nu există evaluări
- g4 - Stress Analysis of Operating Gas Pipeline Installed by HorizontalDocument144 paginig4 - Stress Analysis of Operating Gas Pipeline Installed by HorizontalDevin DickenÎncă nu există evaluări
- IS 4991 (1968) - Criteria For Blast Resistant Design of Structures For Explosions Above Ground-TableDocument1 paginăIS 4991 (1968) - Criteria For Blast Resistant Design of Structures For Explosions Above Ground-TableRenieÎncă nu există evaluări
- SOR 8th Ed 2013Document467 paginiSOR 8th Ed 2013Durgesh Govil100% (3)
- Sayre Materia Medica-3Document87 paginiSayre Materia Medica-3ven_bams5840Încă nu există evaluări
- Antennas Since Hertz and MarconiDocument7 paginiAntennas Since Hertz and MarconiTaiwo Ayodeji100% (1)
- 1.2 - Sewing Machine and Special AttachmentsDocument3 pagini1.2 - Sewing Machine and Special Attachmentsmaya_muth0% (1)
- Concept Page - Using Vagrant On Your Personal Computer - Holberton Intranet PDFDocument7 paginiConcept Page - Using Vagrant On Your Personal Computer - Holberton Intranet PDFJeffery James DoeÎncă nu există evaluări
- Letter of MotivationDocument4 paginiLetter of Motivationjawad khalidÎncă nu există evaluări
- Maintenance Handbook On Compressors (Of Under Slung AC Coaches) PDFDocument39 paginiMaintenance Handbook On Compressors (Of Under Slung AC Coaches) PDFSandeepÎncă nu există evaluări
- Indian Patents. 232467 - THE SYNERGISTIC MINERAL MIXTURE FOR INCREASING MILK YIELD IN CATTLEDocument9 paginiIndian Patents. 232467 - THE SYNERGISTIC MINERAL MIXTURE FOR INCREASING MILK YIELD IN CATTLEHemlata LodhaÎncă nu există evaluări
- India - Wikipedia, The Free EncyclopediaDocument40 paginiIndia - Wikipedia, The Free EncyclopediaPrashanth KrishÎncă nu există evaluări