S-ar putea să vă placă și
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDe la EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsÎncă nu există evaluări
- Psoc 1 - Selecting The Right ADCDocument12 paginiPsoc 1 - Selecting The Right ADCyeiaÎncă nu există evaluări
- Mtouch™ Sensing Solution Acquisition Methods Capacitive Voltage DividerDocument28 paginiMtouch™ Sensing Solution Acquisition Methods Capacitive Voltage DividermhemaraÎncă nu există evaluări
- Normas Instalaciones ElectricasDocument6 paginiNormas Instalaciones ElectricasErick DextreÎncă nu există evaluări
- b2. Partial Discharge Detector - Akil Electronics - PDC 13Document7 paginib2. Partial Discharge Detector - Akil Electronics - PDC 13Harshvardhan ShahÎncă nu există evaluări
- Webcast Reminder RF & Microwave Component Measurement FundamentalsDocument26 paginiWebcast Reminder RF & Microwave Component Measurement FundamentalspÎncă nu există evaluări
- Submitted To: Submitted byDocument13 paginiSubmitted To: Submitted byajayÎncă nu există evaluări
- Development of A Smart Automatic Gas Leakage Detector and Alarming SystemDocument23 paginiDevelopment of A Smart Automatic Gas Leakage Detector and Alarming SystemFerdous AlamÎncă nu există evaluări
- Sensors: A Digital-Analog Hybrid System-on-Chip For Capacitive Sensor Measurement and ControlDocument14 paginiSensors: A Digital-Analog Hybrid System-on-Chip For Capacitive Sensor Measurement and ControlChao-Shiun WangÎncă nu există evaluări
- Soiling Index Measurement Solution: Cr-Pvs1Document3 paginiSoiling Index Measurement Solution: Cr-Pvs1Francisco José Fontelles ObelenisÎncă nu există evaluări
- Exp 09Document18 paginiExp 09khaled mahmudÎncă nu există evaluări
- Layout Tips For 12-Bit AD Converter Application PDFDocument7 paginiLayout Tips For 12-Bit AD Converter Application PDFGeoFurriel100% (1)
- Field Monitoring and Automation Using Iot in AgricultureDocument114 paginiField Monitoring and Automation Using Iot in AgriculturedileeppatraÎncă nu există evaluări
- I Ee ExploreDocument6 paginiI Ee ExplorebaruaeeeÎncă nu există evaluări
- An All-Digital Scalable and Reconfigurable Wide-Input Range Stochastic ADC Using Only Standard CellsDocument5 paginiAn All-Digital Scalable and Reconfigurable Wide-Input Range Stochastic ADC Using Only Standard CellsmmmkÎncă nu există evaluări
- Irjet V5i3286 PDFDocument4 paginiIrjet V5i3286 PDFmatrix singhÎncă nu există evaluări
- Hardware Reference Manual: Sensor Signal Conditioner For Bridge SensorsDocument48 paginiHardware Reference Manual: Sensor Signal Conditioner For Bridge SensorsOmar EzzÎncă nu există evaluări
- ZSC31014Document65 paginiZSC31014William RobinsonÎncă nu există evaluări
- CapSense Proximity DesignDocument12 paginiCapSense Proximity Design99SUPERDOG99Încă nu există evaluări
- A Low-Cost Vector Network Analyzer: Design and Realization: J Verhaevert, P Van TorreDocument5 paginiA Low-Cost Vector Network Analyzer: Design and Realization: J Verhaevert, P Van TorreRobinson Castillejo CamposÎncă nu există evaluări
- 00001334B PDFDocument30 pagini00001334B PDFJly JlyÎncă nu există evaluări
- Design of Variable Parameter IC Testing For CMOS DevicesDocument3 paginiDesign of Variable Parameter IC Testing For CMOS DevicesmdlogicsolutionsÎncă nu există evaluări
- Fuel Level IndicatorDocument3 paginiFuel Level Indicatorவிஜய் பாலாஜி0% (1)
- Celyon 1057 DaegDocument2 paginiCelyon 1057 DaegAli SharanÎncă nu există evaluări
- Chapter 3Document8 paginiChapter 3Jayanth ReddyÎncă nu există evaluări
- Charge Intergraion - Analog Vs DigitalDocument8 paginiCharge Intergraion - Analog Vs DigitalKen BuiÎncă nu există evaluări
- Data Aquizition SystemDocument63 paginiData Aquizition SystemKVKÎncă nu există evaluări
- Fast Multi Channel AnalyzerDocument7 paginiFast Multi Channel AnalyzerDiana AndreiÎncă nu există evaluări
- Manual ProH 4.6 040206Document46 paginiManual ProH 4.6 040206maximeÎncă nu există evaluări
- Vasu DFTDocument28 paginiVasu DFTsenthilkumarÎncă nu există evaluări
- 5.g 133 - Efficient Fault Effect Extraction For An IntegratedDocument4 pagini5.g 133 - Efficient Fault Effect Extraction For An IntegratedVančo LitovskiÎncă nu există evaluări
- 02 - Tester Hardware PDFDocument20 pagini02 - Tester Hardware PDFdeepakÎncă nu există evaluări
- Implementing SCADA System For Industrial Environment Using IEEE C37.1' StandardsDocument14 paginiImplementing SCADA System For Industrial Environment Using IEEE C37.1' StandardsdggfÎncă nu există evaluări
- A Design of 90 μW SENT Transmitter for Automotive Pressure Sensor in 0.18 μm CMOS TechnologyDocument3 paginiA Design of 90 μW SENT Transmitter for Automotive Pressure Sensor in 0.18 μm CMOS TechnologyMax Bike MartinezÎncă nu există evaluări
- ProReact DSCU 2019 Installation Manual Rev 1-1Document17 paginiProReact DSCU 2019 Installation Manual Rev 1-1Ionut BucurÎncă nu există evaluări
- 2.5nW Subthreshold VCO Based CMOS Temperature Sensor: Waseem Arshad, Rashad Ramzan, Azam Beg, and Nabil BastakiDocument4 pagini2.5nW Subthreshold VCO Based CMOS Temperature Sensor: Waseem Arshad, Rashad Ramzan, Azam Beg, and Nabil BastakiMuhammad YousafÎncă nu există evaluări
- In-Fixture Measurements Using Vector Network Analyzers: Keysight TechnologiesDocument33 paginiIn-Fixture Measurements Using Vector Network Analyzers: Keysight TechnologiesPaulo Tibúrcio PereiraÎncă nu există evaluări
- 5968 5329eDocument32 pagini5968 5329eNicolás QuintieriÎncă nu există evaluări
- Overspeed DetectionDocument67 paginiOverspeed Detection20-403 TejashwiniÎncă nu există evaluări
- FinalDocument33 paginiFinalnaveenaÎncă nu există evaluări
- GSM Security SystemDocument5 paginiGSM Security SystemVivek Chandra YadavÎncă nu există evaluări
- GSM Security SystemDocument5 paginiGSM Security SystemPreru PreranaÎncă nu există evaluări
- AN12217 - S32K1xx ADC Guidelines, Spec andDocument26 paginiAN12217 - S32K1xx ADC Guidelines, Spec andNguyễn Mỹ KiênÎncă nu există evaluări
- V9821 Datasheet V0.1Document220 paginiV9821 Datasheet V0.1singh7863100% (1)
- Using Current Sense Amplifiers To Solve Today's Current Sensing Design ChallengesDocument53 paginiUsing Current Sense Amplifiers To Solve Today's Current Sensing Design ChallengesСергей ГубскийÎncă nu există evaluări
- Pdtech Deltamaxx: Digital Loss Factor/Capacitance Analyzer and Partial Discharge Detector For Test Voltages Up To 50 KVDocument4 paginiPdtech Deltamaxx: Digital Loss Factor/Capacitance Analyzer and Partial Discharge Detector For Test Voltages Up To 50 KVJagadish Babu DegalaÎncă nu există evaluări
- A1A EC SENSORS AN2 Design of Electronics For EC Sensors V4Document7 paginiA1A EC SENSORS AN2 Design of Electronics For EC Sensors V4Muhammad RohfadliÎncă nu există evaluări
- Automotive Electronics Barometric Pressure Sensor For Engine Management Systems SMD288Document2 paginiAutomotive Electronics Barometric Pressure Sensor For Engine Management Systems SMD288mobil benerÎncă nu există evaluări
- 146336888ADM1022 ADocument21 pagini146336888ADM1022 Asantiago moralesÎncă nu există evaluări
- Semiconductor Sensor Application NoteDocument8 paginiSemiconductor Sensor Application NoteDragos CezarÎncă nu există evaluări
- 99 000 RPM Contact-Less Digital Tachometer: Featuring LCD Display and Automatic DATA Hold FunctionDocument9 pagini99 000 RPM Contact-Less Digital Tachometer: Featuring LCD Display and Automatic DATA Hold Functionapi-19786583Încă nu există evaluări
- Control Sysytems by SuklaDocument51 paginiControl Sysytems by Suklavinay kumar MÎncă nu există evaluări
- TMAG5170A1EDGKRQ1 (TI Hall Effect Sensor)Document61 paginiTMAG5170A1EDGKRQ1 (TI Hall Effect Sensor)Vikaas PansheriaÎncă nu există evaluări
- ADC Design Guide MicrochipDocument0 paginiADC Design Guide MicrochipOrlando MartínÎncă nu există evaluări
- VMS500 HardwareDocument2 paginiVMS500 HardwareJagan TnÎncă nu există evaluări
- PDIX TrafoMon ENDocument12 paginiPDIX TrafoMon ENVũ Hồng GiaoÎncă nu există evaluări
- Real-Time Machine Vision Based Robot: G. Sathya G. Ramesh ChandraDocument10 paginiReal-Time Machine Vision Based Robot: G. Sathya G. Ramesh ChandragrchandraÎncă nu există evaluări
- Partial Discharge Monitor For GISDocument4 paginiPartial Discharge Monitor For GISAlauddin khanÎncă nu există evaluări
- AN1-Achieving Accuracy in Digital Meter DesignDocument9 paginiAN1-Achieving Accuracy in Digital Meter DesigneyadÎncă nu există evaluări
- Touch Screen Technology DocumentationDocument21 paginiTouch Screen Technology DocumentationUday Pratap64% (11)
- Ats 33 Manual enDocument39 paginiAts 33 Manual enalexmuchmure2158Încă nu există evaluări
- FDC 1004Document30 paginiFDC 1004Joseph BernardÎncă nu există evaluări
- How To Design Capacitive Touch and Proximity Sensing Technology Into Your ApplicationDocument9 paginiHow To Design Capacitive Touch and Proximity Sensing Technology Into Your ApplicationPhan Anh TuanÎncă nu există evaluări
- ZQL1688 - Function Testing SOP - ADocument22 paginiZQL1688 - Function Testing SOP - AAlexandre PatrocinioÎncă nu există evaluări
- User'S Guide: 430Boost-Sense1 - Capacitive Touch Boosterpack For The LaunchpadDocument24 paginiUser'S Guide: 430Boost-Sense1 - Capacitive Touch Boosterpack For The LaunchpadasikuÎncă nu există evaluări
- An75320 001-75320 PDFDocument34 paginiAn75320 001-75320 PDFVictor CuellarÎncă nu există evaluări
- Automatic Rain Operated Wiper SystemDocument20 paginiAutomatic Rain Operated Wiper SystemVinayaga ProjectinstituteÎncă nu există evaluări
- Analog Sensor Conditioning Circuits - An Overview AN990Document16 paginiAnalog Sensor Conditioning Circuits - An Overview AN990thietdaucongÎncă nu există evaluări
- Cypress USB-Serial Configuration Utility User GuideDocument54 paginiCypress USB-Serial Configuration Utility User GuidePicsel PoiÎncă nu există evaluări
- Touch Sensor ModuleDocument23 paginiTouch Sensor ModulecmdiÎncă nu există evaluări
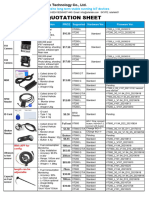
- IStartek Price List of Optional Accessories V202304Document4 paginiIStartek Price List of Optional Accessories V202304zebu francisÎncă nu există evaluări
- Induction CookerDocument16 paginiInduction CookersaravanakumarpalaniÎncă nu există evaluări
- Balluf SensorsDocument116 paginiBalluf Sensorsdevol999Încă nu există evaluări
- Capacitive & Piezoelectric Sensing & ActuationDocument41 paginiCapacitive & Piezoelectric Sensing & ActuationJan Cornelius RodriguesÎncă nu există evaluări
- Capacitance Sensing Signal To Noise Ratio Requirement For Capsense Applications An2403Document4 paginiCapacitance Sensing Signal To Noise Ratio Requirement For Capsense Applications An2403leeone100% (2)
- Touch SensorDocument12 paginiTouch SensorShrey MishraÎncă nu există evaluări
- Proximity SensorDocument4 paginiProximity SensormunugotisumanthraoÎncă nu există evaluări
- A Review of Technologies For Sensing Contact Location On The Surface of A DisplayDocument29 paginiA Review of Technologies For Sensing Contact Location On The Surface of A Displayrfh3llÎncă nu există evaluări
- User'S Guide: 430Boost-Sense1 - Capacitive Touch Boosterpack For The LaunchpadDocument24 paginiUser'S Guide: 430Boost-Sense1 - Capacitive Touch Boosterpack For The LaunchpadasikuÎncă nu există evaluări
- Ttp226 8way Touch SensorDocument8 paginiTtp226 8way Touch SensorCarlos BlondelÎncă nu există evaluări
- Draft Chpt4 Reactive Sensors 1Document35 paginiDraft Chpt4 Reactive Sensors 1Principal OfficeÎncă nu există evaluări
- Touch SensorDocument14 paginiTouch SensorAbby SarondoÎncă nu există evaluări
- 2009 Quick Select Product GuideDocument71 pagini2009 Quick Select Product GuideDavid Jantes100% (1)
- QTouch Modular Library Peripheral Touch Controller 40001986DDocument108 paginiQTouch Modular Library Peripheral Touch Controller 40001986DJustinÎncă nu există evaluări
- FPS110, FPS110B, FPS110E: Features ApplicationsDocument17 paginiFPS110, FPS110B, FPS110E: Features ApplicationsFrancisco HurtadoÎncă nu există evaluări
- PLCDocument62 paginiPLCASHISH BHARAMBEÎncă nu există evaluări
- Isphere UI Seminar ReportDocument11 paginiIsphere UI Seminar ReportImran Al NoorÎncă nu există evaluări
- Project Final ReporT 1Document14 paginiProject Final ReporT 1Baladitya VardhanÎncă nu există evaluări
- Instant Inkjet Circuits: Lab-Based Inkjet Printing To Support Rapid Prototyping of Ubicomp DevicesDocument10 paginiInstant Inkjet Circuits: Lab-Based Inkjet Printing To Support Rapid Prototyping of Ubicomp Devicesreader152000Încă nu există evaluări